


Что такое радиус разворота? — Рамблер/авто
Поездки на заполненных различным транспортом улицах городов, а также отсутствие свободного места на парковках, вызвали у водителей легкового транспорта более высокую степень интереса к такому параметру машины, как радиус разворота.
Проблема маневров на автомобиле в условиях отсутствия свободного места существовала практически постоянно. Но если в 20-30-е годы это компенсировалось небольшим количеством автотранспорта на дорогах, то в настоящее время, когда на улицах количество машин стало в десятки раз больше, протискиваться стало достаточно сложно. От каких параметров зависит возможность автомобиля совершать маневры в подобных условиях, какие отличия имеют разные модели и какие показатели определяют их возможность?
Оценочные показатели. Самым простым из них становится такой параметр, как радиус разворота. Определить его можно как при помощи замеров, так и опытным путем. Величина, которую получают в результате выполнения замеров, будет более точной, так как при ее определении можно учесть и углы ввода колес.
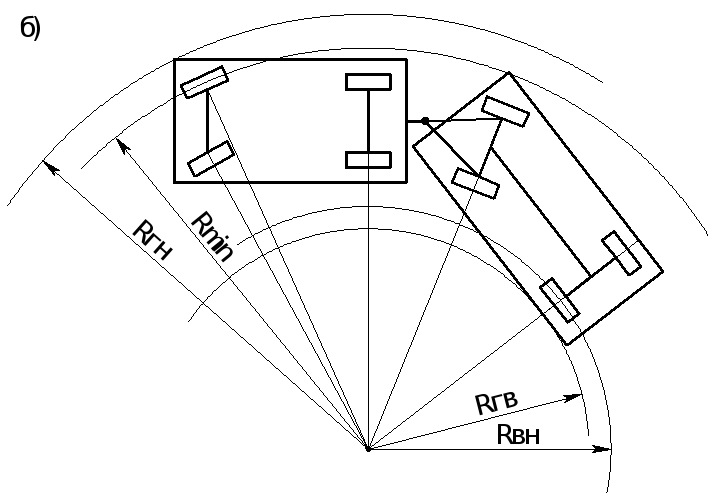
Но почему, в таком случае, в некоторых моделях автомобилей могут быть указаны сразу два значения радиуса разворота автомобиля через дробь? Чаще всего указывается минимальное значение радиуса разворота автомобиля, определяемого по следу переднего колеса, называемого также радиусом «от бордюра до бордюра». Но при движении в узком дворе или имеющемся вблизи бордюра препятствии, иногда осуществить разворот не представляется возможным. Кроме того, стоит учитывать еще и наличие переднего свеса, представляющего собой расстояние от передней оси до наиболее выступающей точки переднего габарита. Чем больше его длина, тем выше степень неточности. В этом случае, стоит использовать второй показатель, который называется наименьший радиус для разворота машины по радиусу переднего габарита («от стены до стены»). Значение этого показателя может говорить о том, что машина может выполнить разворот на дороге, если в пределах минимального радиуса по наружному габариту не имеется препятствий, которые могут быть задеты бампером.![]()
Для проведения полной оценки возможности выполнения разворота, при отсутствии достаточного количества свободного пространства, следует принимать во внимание еще один нюанс. При выполнении поворота происходит смещение средней части кузова к внутренней части поворота. Поэтому, если при выезде с места стоянки сразу выкрутить руль до упора, то можно задеть рядом стоящий автомобиль бортом. Именно поэтому определяется габаритный коридор наименьшего размера, который требуется автомобилю для успешного осуществления поворота. Это расстояние между самой большой и самой маленькой окружностью.
Конструктивные особенности. Идеальными условиями для осуществления поворота становится расположение колес, близкое к 90 градусам, то есть колеса должны быть повернуты практически поперек, по отношению к кузову машины, но подобное решение непросто реализовать на практике. Вторым моментом становится увеличение размера колесных арок, в результате чего в подкапотном пространстве практически не остается места для мотора. И третьим нюансом станет размещение деталей рулевой трапеции, обеспечивающих требуемые углы соотношения между углами поворота левого и правого колес. На это тоже требуется место.
У автомобилей с передним приводом имеется ограничения на угол поворота колеса возможностями шарниров равных угловых скоростей. Примерное значение этого показателя равно 40-41 градусу.
На машинах с задним приводом угол поворота может быть и больше, за счет увеличение колесных арок, но в итоге уровень будет примерно такой же.
Итог. Определение угла поворота колес и радиуса разворота обеспечивается техническими особенностями, и оценочными показателями машины.
Радиус разворота легкового автомобиля таблица
Что такое радиус разворота
Уже из названия характеристики можно догадаться о её сути. Под этим параметром подразумевается полуокружность, которую описывает автомобиль во время манёвра при полностью вывернутом рулевом управлении. Знать это значение нужно обязательно. Более того, необходимо отличать разворот по малому и большому радиусу.
Более того, необходимо отличать разворот по малому и большому радиусу.
Схематичное изображение поворота авто
Некоторые производители указывают в качестве радиуса разворота два параметра, разделённых между собой дробью. Минимальный показатель поворота автомобиля соответствует следу от наружного колеса, который оставляет транспортное средство при манёвре. Такой показатель называется «от бордюра до бордюра». Это значение не учитывает размеры переднего свеса, от длины которого зависит точность показателя.
На практике удобнее использовать другое значение — радиус «от стены до стены». В этом случае учитываются препятствия, которые входят в минимальное пространство по наружным габаритам и могут быть задеты бампером. Но и на этом ещё не всё. Существует ещё один нюанс, который нужно учитывать водителю при езде в ограниченном пространстве.
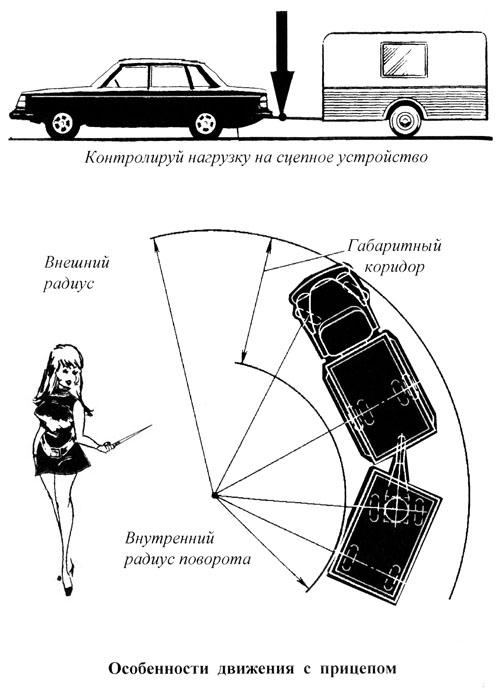
Значение для авто с прицепом
При повороте некоторая часть кузова смещается во внутреннюю сторону. Потому при выезде со стоянки нельзя резко выворачивать руль до предельного положения. При таких действиях можно задеть соседний автомобиль. Чтобы понять какой радиус нужен для разворота, необходимо определить минимальный габаритный коридор для своей машины. Для этого нужно знать расстояние, которое отделяет максимальную и минимальную окружности.
Такая осведомлённость позволит не только без проблем маневрировать в сложных условиях и делать правильные манёвры на узкой дороге, но и выполнять поворот на дороге согласно разъяснениям ГИБДД 2020 года.
Насколько важен параметр
Современным водителям приходится ездить в непростых условиях: машин много, а места для них часто не хватает. Особенно это касается парковочных мест в больших городах и людных местах.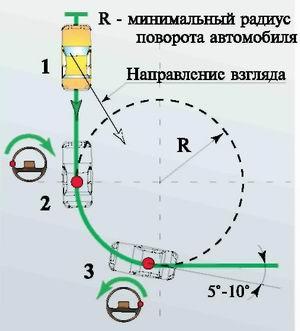 Часто водителю приходится втискиваться между машинами впритык и выполнять сложные манёвры среди других автомобилей.
Часто водителю приходится втискиваться между машинами впритык и выполнять сложные манёвры среди других автомобилей.
Радиус поворота отображает маневренность автомобиля, его способность выполнять повороты на узкой дороге и в ограниченном пространстве. Чем меньшим является этот параметр, тем более комфортным и простым будет управление ТС во время передвижения в ограниченном пространстве. Если известен радиус разворота и ширина дороги, то можно путём проведения несложных расчётов узнать вероятность осуществления манёвра за один раз.
Производители автомобилей обязательно указывают интересующее нас значение для каждого автомобиля. Этот показатель можно найти в практическом руководстве или техническом описании. Но здесь может ждать подвох. Многие производители указывают минимальный показатель — разворот по малому радиусу. Это позволят им представить своё творение более маневренным, чем есть на самом деле. Чтобы узнать действительный показатель, необходимо учитывать размеры свеса автомобиля.
Сравнение показателей маневренности с разными прицепами и без них
Как измеряем
Мы уже говорили выше о двух значениях, которые отображают радиус поворота автомобиля. Для вычисления каждого из них используются разные методы.
- Для вычисления параметра «от бордюра до бордюра» необходимо при помощи мела сделать отметку начального положения наружного колеса. Выворачиваем руль пока он не примет граничное положение, разворачиваем автомобиль на 180 градусов. Отмечаем конечное положение колеса. Между полученными отметками измеряем расстояние. Половина от этого результата будет отражать искомое значение. Он будет обозначать необходимую ширину дороги, которая потребуется для разворота авто.
- Более реальное значение отображает характеристика «от стены до стены». Для её вычисления потребуется зафиксировать стержень на наружном углу бампера. На стержне крепится мел и выполняется разворот машины, как это делалось в предыдущем случае. Получится полуокружность, в которой потребуется измерить диаметр.
 Половина этого значения будет отражать нужный нам радиус разворота машины.
Половина этого значения будет отражать нужный нам радиус разворота машины.
В свободном доступе имеются таблицы с радиусом разворота легкового автомобиля. Также найти нужный показатель для конкретной марки машины можно в руководстве по эксплуатации и техническом описании
В любом случае, на этот параметр нужно обращать внимание. Эти знания позволят избежать неприятных ситуаций на дороге и паркинге
Лучшие цены и условия на покупку новых авто
Советы дальнобойщику
Управлять фурой так же трудно, как водить корабль по морю, здесь нужны навыки, многолетний опыт и профессионализм:
- Никаких резких движений – сзади груз, который превосходит массу тягача. Его инерция толкает машину вперед, и это нужно постоянно помнить, потому что резко изменить направление проблематично.
- Опасный момент вождения – это повороты, т. к. ведомая конструкция стремится по инерции вперед, что чревато складыванием пополам. Не стоит делать резких движений, а только плавно управлять техникой и не «газовать».
- Когда выпадают осадки, то такие физические законы, как трение – не действуют, поэтому нужно правильно выбрать скорость пропорционально качеству дорожного полотна.
- При поворотах на перекрестках помните, что водители соседних машин начинают движение раньше, чем задняя часть автопоезда проедет мимо. Не ленитесь посмотреть в зеркала, чтобы исключить столкновение.
- Помните, что лихачи совершают рискованные обгоны, занимая освободившееся место между двигающимся транспортом. В случае экстренной ситуации нарушители успеют затормозить, а у вас сзади груз, так что мгновенно остановиться не получится.
- Следует постоянно помнить, что у полуприцепа самостоятельная траектория движения, поэтому выбирайте радиус немногим больше, чтобы исключить выезд его за линию дороги.
- Не стоит обгонять, когда не просматривается впереди лежащая дорога, резко свернуть или затормозить уже не получится.
Надеемся, что приведенные в статье рекомендации по прохождению сложных участков дороги помогут дальнобойщикам избежать нарушений ПДД. Помните, что опытный шофер видит далеко, а профессионал уверенно контролирует ситуацию вокруг управляемого транспортного средства.
Помните, что опытный шофер видит далеко, а профессионал уверенно контролирует ситуацию вокруг управляемого транспортного средства.
Особенности маневрирования
Водители-дальнобойщики обладают специфической подготовкой: уверенно входят в повороты на трассе и во время перемещений по городу, при прохождении перекрестков, потому что движения отработаны до автоматизма на специальных дорожках автодрома, как показано на этом видео:
Такой термин, как радиус разворота фуры должен учитываться при разработке подъездных путей к складским помещениям и местам разгрузки крупнотоннажного автомобильного транспорта. А разворотная площадка для фуры должна соответствовать утвержденным стандартам, чтобы большегрузный автомобиль мог уверенно маневрировать на выделенной для этих целей территории.
Таблица ширины площадки для ТС (транспортных средств)
| Тип авто | Длина ТС в м | Ширина площадки, м |
| Камаз | 10 | 22 |
| Еврофура | 18 | 38 |
Радиус разворота еврофуры
Европейские стандарты регламентируют ограничения по длине, например, для седельного автопоезда этот параметр – 16,5 метра. Размеры полуприцепа: 12 м от оси ССУ до кормовой части и 2,1 м до переднего бампера.
Стандартный радиус разворота еврофуры, например, на 180 или 360 градусов внутри воображаемой площади, которая составлена двумя окружностями с R = 12,5 м и 5,3 м, должен свободно выполняться при условии, что выступающие части машины не пересекают обозначенные границы во время маневрирования.
Схематическое изображение радиуса разворота фуры
Радиус поворота «американца»
Тягачи с полуприцепами, разработанные американскими конструкторами, называют траками, а маневренность, особенно во время проезда по городу, ограниченная из-за большого линейного размера. Для поворота на 90 градусов такому крупногабаритному транспортному средству требуется в 2 раза больше радиуса, чем европейским аналогам. Поэтому иногда приходится видеть такие ситуации, как на фото.
Для поворота на 90 градусов такому крупногабаритному транспортному средству требуется в 2 раза больше радиуса, чем европейским аналогам. Поэтому иногда приходится видеть такие ситуации, как на фото.
Неправильный разворот фуры
В городской черте такие автомобили не могут осуществлять безаварийное движение, чтобы постоянно не нарушать ПДД, затрудняют перемещение другого автотранспорта, т. к. их длина не соответствует европейским стандартам. Владельцы легковых автомобилей вынуждены держаться на расстоянии от «американцев», чтобы не попасть под удар разворачивающегося «монстра».
Как измеряем
Измерить радиус можно просто: отмечаем стартовое положение одного колеса (наружного), выворачиваем до конца рулевое колесо, разворачиваемся на полные 180 градусов, отмечаем конечное положение того же колеса. Между отметками замеряем расстояние, половина его и будет радиусом разворота. Этот размер является минимальной шириной дороги (именно гладкой части), которая позволит развернуться в один заход.
Это в теории, на практике же придётся учитывать и размер переднего свеса автомобиля, это расстояние от передней оси до кончика бампера. Дело в том, что ширина дороги не всегда ограничена низким бордюром, частенько бывают отбойники, а также сами бордюры могут быть до метра высотой. И если радиус разворота хорошо вписывается в идеальную дорогу, то с высокими ограничителями можно не вписаться. Так вот реальный радиус измеряется чуть сложнее – необходимо на наружной стороне бампера установить свес с мелом (можно на стержне), после разворота мел оставит отметки о реальном радиусе.
Радиус разворота на парковке
Рекомендуемые параметры расчетных автомобилей для Российской Федерации
Библиографическое описание: Абдуназаров Ж. Н., Мамарасулова М. Н. Рекомендуемые параметры расчетных автомобилей для Российской Федерации // Молодой ученый. 2016. №7.2. С. 26-29. URL https://moluch.ru/archive/111/27588/ (дата обращения: 23.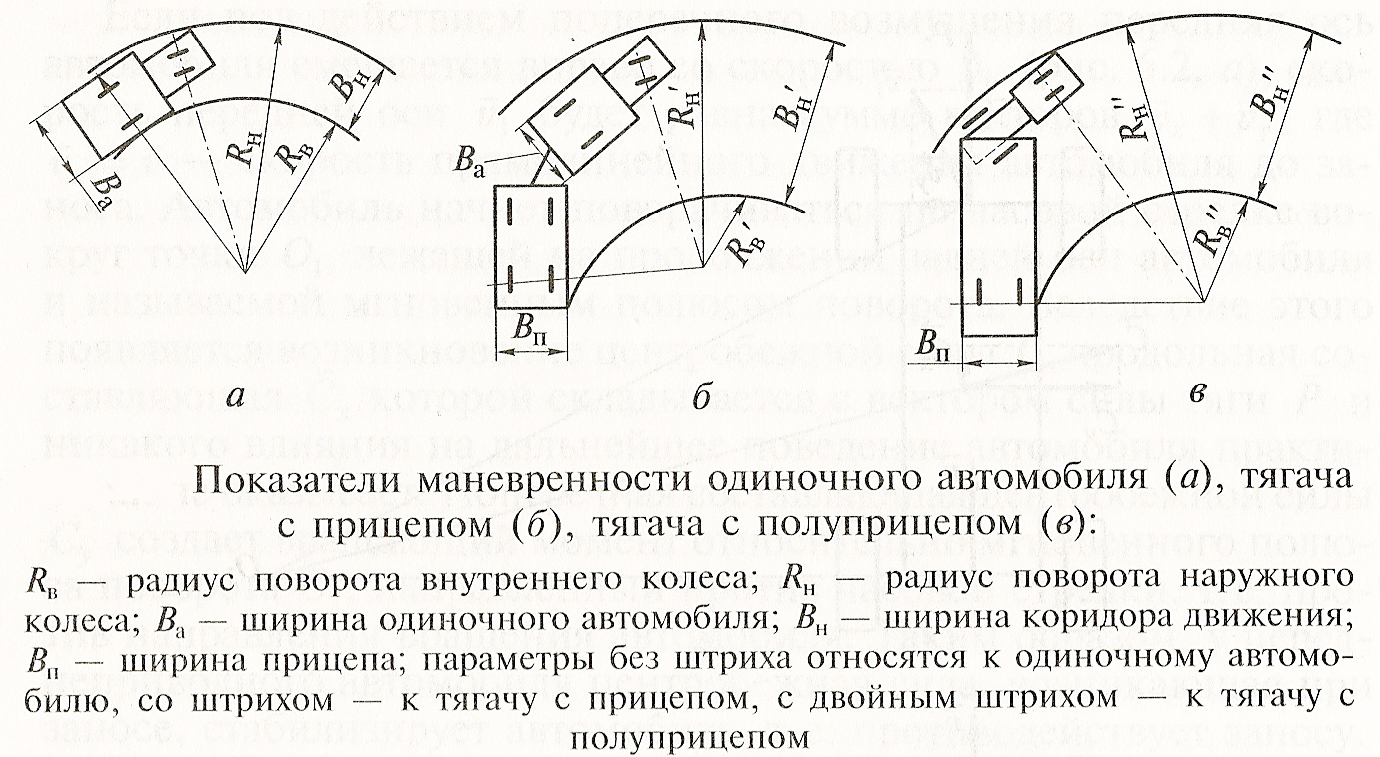 07.2019).
07.2019).
В связи с повышением динамических характеристик автомобилей совершенствуются требования к строительству и проектированию автомобильных дорог. При проектировании дорог возникает необходимость введения понятия «расчетный автомобиль». Этот термин определяется по-разному .
«Расчетный автомобиль – это транспортное средство, используемое для определения геометрических параметров автомобильных дорог (минимальные радиусы поворота пересечения в одном уровне, кольцевые пересечения), влияющих на безопасность, пропускную способность и стоимость пересечения. Это – условная транспортная единица, параметры которой используют в расчетах дорожной одежды и ее элементов».«Расчетный автомобиль – это такой автомобиль, массу, размеры и динамические качества которого используют при проектировании автомобильной дороги. Такие параметры расчетного автомобиля, как размеры и минимальный радиус поворота, должны быть такими же, как и у большинства других автомобилей этого же класса, которые предположительно будут использовать для движения проектируемую дорогу».
При проектировании автомобильных дорог и парковочных мест возникает необходимость определять ширину проездов, величину маневровых площадок, геометрические параметры. Это требует в каждом конкретном случае построения динамического габарита расчетных автомобилей, которое является процессом трудоемким (особенно для автопоездов) и не в достаточной мере освоенным проектировщиками.
Отсутствие систематизированного справочного материала по этим вопросам зачастую является причиной необоснованных проектных решений, которые либо ведут к завышению сметной стоимости объектов, либо не обеспечивают нормальных эксплуатационных условий работы автотранспорта.
Нами было исследован и изучен состав транспортных средств, передвигающихся по российским автомобильным дорогам, и разделен на следующие группы:
1. Легковой автомобиль;
2. Грузовой автомобиль;
Автобусы разделены на три типа: городской автобус, пригородный автобус, сочлененный автобус; автопоезда – два типа по длине.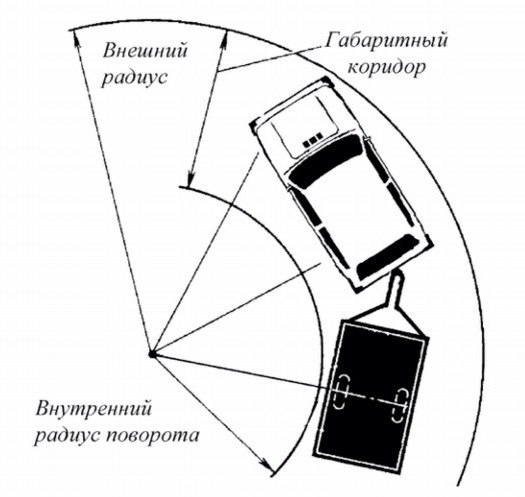
Исходя из проведенных исследований нами были предложены параметры рекомендуемых расчетных автомобилей для проектирования автомобильных дорог. Были учтены не только длина и ширина расчетного автомобиля, но и база, передний свес, задний свес, который играет немаловажную роль при определении минимального радиуса автомобильной дороги (табл.1).
Размеры рекомендуемых расчетных автомобилей
Тип расчетного автомобилей
Прохождение поворотов
Умудренные опытом дальнобойщики чувствуют габариты автотранспортного средства, состоящего из тягача и полуприцепа с неуправляемой тележкой, а также возникающие сложности, связанные со смещением последней при вхождении в поворот.
Изящное прохождение перекрестка
Гораздо больше внимания водителю фуры требуется при выполнении маневрирования в черте города, где интенсивное движение пешеходов, а также легкового и общественного транспорта. Особо надо отметить сложности при проезде развязок и перекрестков – все необходимые маневры по изменению направления и смены полосы движения нужно выполнить заранее, но не ближе, чем за 20 метров от начала развязки или пересечения дорог.
Выполняя поворот направо, следует обратить внимание на встречную полосу дороги, т. к
автопоезд часто выезжает на нее, чтобы избежать заезда колесами тележки полуприцепа на бордюр, создавая угрозу травматизма пешеходов. При левом повороте не нужно стремиться проезжать центр перекрестка, потому что увеличивается площадь разворота, что затрудняет другому транспорту движение в нужную сторону.
Погрешности в повороте
Статьи по теме
Лонжерон автомобиля – конструкция, функционал, ремонт
Какой должен быть уровень антифриза: норма и тонкости проверки
Как поменять сальник распредвала: подробное пошаговое руководство
Какую жидкость лить в ГУР: разбираем все мифы
Шумоизоляция автомобиля: пошаговая инструкция + обзор материалов
Разбили стекло в автомобиле: кто виноват и что делать
Как снять датчик охлаждающей жидкости самостоятельно и заменить на новый
Заклинило колесо: что делать, если рядом нет СТО
Порядок ремонта насос-форсунок «Скания»
Ремонт рулевой рейки «Шевроле»: все не так страшно
Ремонт рулевой рейки «Опеля»: диагностика, профилактика, сервисное обслуживание
Ремонт рулевой рейки «Ауди»: диагностика и способы
Объем охлаждающей жидкости – важная характеристика технического состояния авто
Бескаркасные дворники: правила выбора и эксплуатации
Штраф за летнюю резину – есть ли он и какой?
Изменяем ли параметр
Отчего зависит радиус разворота? Во-первых, от габаритов авто, их поменять, разумеется, не получится. Во-вторых, от того, какой угол поворота у передних колёс. В общем, поменять радиус без серьёзного вмешательства в основную конструкцию не получится. А это потеря гарантии, а также возможные проблемы со стабильной работой. Обычно такие переделки можно встретить на машинах для дрифта, где выворот делают максимальным. Правда, это делается не для уменьшения радиуса разворота, а для увеличения угла заноса, который может держать машина. Обычные гражданские машины лучше не переделывать.
Во-вторых, от того, какой угол поворота у передних колёс. В общем, поменять радиус без серьёзного вмешательства в основную конструкцию не получится. А это потеря гарантии, а также возможные проблемы со стабильной работой. Обычно такие переделки можно встретить на машинах для дрифта, где выворот делают максимальным. Правда, это делается не для уменьшения радиуса разворота, а для увеличения угла заноса, который может держать машина. Обычные гражданские машины лучше не переделывать.
Статья написана по материалам сайтов: moluch.ru, www.drive2.ru, autowestnik.ru.
Что такое радиус поворота
Многие автолюбители «не в теме», и редко кто из них знает, что такое радиус поворота фуры. Согласно специальной технической литературе – это воображаемая дуга, по линии которой перемещается центр тяжести тягача с полуприцепом при выполнении сложного маневрирования. Максимальное значение этой величины (радиуса) во многом зависит от специфической конструкции транспортного средства.
Вот как фура во время поворота может зацепить своим полуприцепом легковой автомобиль:
Есть специальный термин – расчетный автомобиль, его тактико-технические показатели используются при разработке проектов трасс регионального значения. Такие параметры, например: размер и R min поворота должны быть идентичными у каждого класса автотранспорта.
Нормы европейского стандарта регламентируют следующие габариты для автотранспорта большегрузной категории во время движения на поворотах:
- при R наружном в 12,5 м – R внутренний будет равен или меньше 5,3 м;
- коридор для вписывания в поворот – 7,2 м;
- R min наружный не должен превышать 12,5 м.
Например: для автопоезда типа А16, имеющего линейный размер до 16 метров, и аналогичного вида А20 с длиной до 20 м прописаны строгие ограничения, указанные в приведенной ниже таблице:
| Тип автомобиля | R min поворота, м | R min внешний, м | R min внутренний, м |
| А16 | 9,7 | 10,2 | 6,2 |
| А20 | 12,1 | 12,6 | 8,5 |
Типичными прототипами для расчетных автомобилей могут служить:
- автопоезд до 16 м – MAN F-200019.
 403 FLT или европейская фура с габаритами 16,5 × 2,5 м, где первый параметр – линейный, а второй – ширина;
403 FLT или европейская фура с габаритами 16,5 × 2,5 м, где первый параметр – линейный, а второй – ширина; - 20-метровый вариант – «Мерседес-Бенц Актрос» или СЗАП-8357А, с габаритами 19,8 на 2,5 м.
Автопоезда с двумя или тремя прицепами, имеющие длину больше 20 метров, используются всеми перевозчиками мира, поэтому при разработке макетов автотрасс нужно проводить дополнительное компьютерное моделирование такого специфического движения во время поворотов на пересечениях дорог или городских перекрестках.
Автопоезд на дороге
Список источников
- yvezi.ru
- rad-star.ru
- the-avto.ru
Поделитесь с друзьями!
Вот как можно уменьшить радиус поворота своей машины
Как улучшить угол поворота колес своего автомобиля?
На канале ChrisFix появилось интересный лайфхак, который может сделать любой владелец автомобиля. Благодаря некоторой легкой модернизации машины, любой желающий может уменьшить радиус поворота своего автомобиля. Насколько же можно улучшить угол поворота колес? Все конечно зависит от конструкции вашего автомобиля. Но в среднем в большинстве автомобилей вы можете существенно улучшить запас хода рулевого колеса, благодаря чему и уменьшится радиус поворота вашей машины.
Смотрите также: Как сделать идеальный разворот с ручником: Видео
Самое интересное, что для некоторых типов автомобилей (все зависит от конструкции рулевого управления) это сделать очень и очень просто. Смотрим.
Да, к сожалению, видеоролик пока доступен на YouTube только на английском языке без перевода и русских субтитров. Но как вы увидели, ролик содержит детальный лайфхак, который наглядно показывает, что вам нужно сделать, чтобы уменьшить радиус поворота (разворота) вашего автомобиля за счет увеличения угла поворота колес. Думаем тем, кто понимает, как устроено рулевое управление, подвеска и колесная ступица, все будет понятно и без перевода.
Но как вы увидели, ролик содержит детальный лайфхак, который наглядно показывает, что вам нужно сделать, чтобы уменьшить радиус поворота (разворота) вашего автомобиля за счет увеличения угла поворота колес. Думаем тем, кто понимает, как устроено рулевое управление, подвеска и колесная ступица, все будет понятно и без перевода.
Зачем менять угол поворота колес?
Для многих это больной вопрос. Например, многие автолюбители разочарованы большим радиусом разворота своего автомобиля из-за небольших углов поворота колес. Это, к сожалению, реально раздражает многих. Часто бывает даже так, что людям практически все нравится в автомобиле, которым они владеют, за исключением угла поворота колес, в результате чего машина имеет слишком большой радиус при развороте.
К сожалению, многие автовладельцы вынуждены смириться с тем, что в их машине слишком маленький угол поворота колес, считая это как неизбежную особенность автомобиля. Но оказывается, рукастые владельцы могут легко и просто улучшить угол поворота передних колес, уменьшив тем самым радиус проезда поворота своего авто.
Смотрите также: Как сорвать колеса в пробуксовку
На примере автомобиля, который был снят в видео- лайфхаке, автор блога ChrisFix демонстрирует нам, что запас хода рулевой рейки ограничен пластиковыми ограничителями. Для того чтобы увеличить угол поворота колес, вы должны уменьшить толщину этих распорок, либо подпилив их (или сточив), либо установив свои собственные пластиковые тонкие проставки.
Правда при этом способе вы не сможете существенно увеличить угол поворота колес без последствий, поскольку, в этом случае колеса при повороте рулевого колеса могут начать задевать о детали подвески, арки кузова и т.п.
Как же в этом случае быть? У блогера для этого также есть решение.
Например, в ролике вы можете увидеть, как видеоблогер изготовил собственные тонкие пластиковые ограничители из обычной пластиковой заготовки с аналогичным диаметром оригинального ограничителя хода рулевой рейки.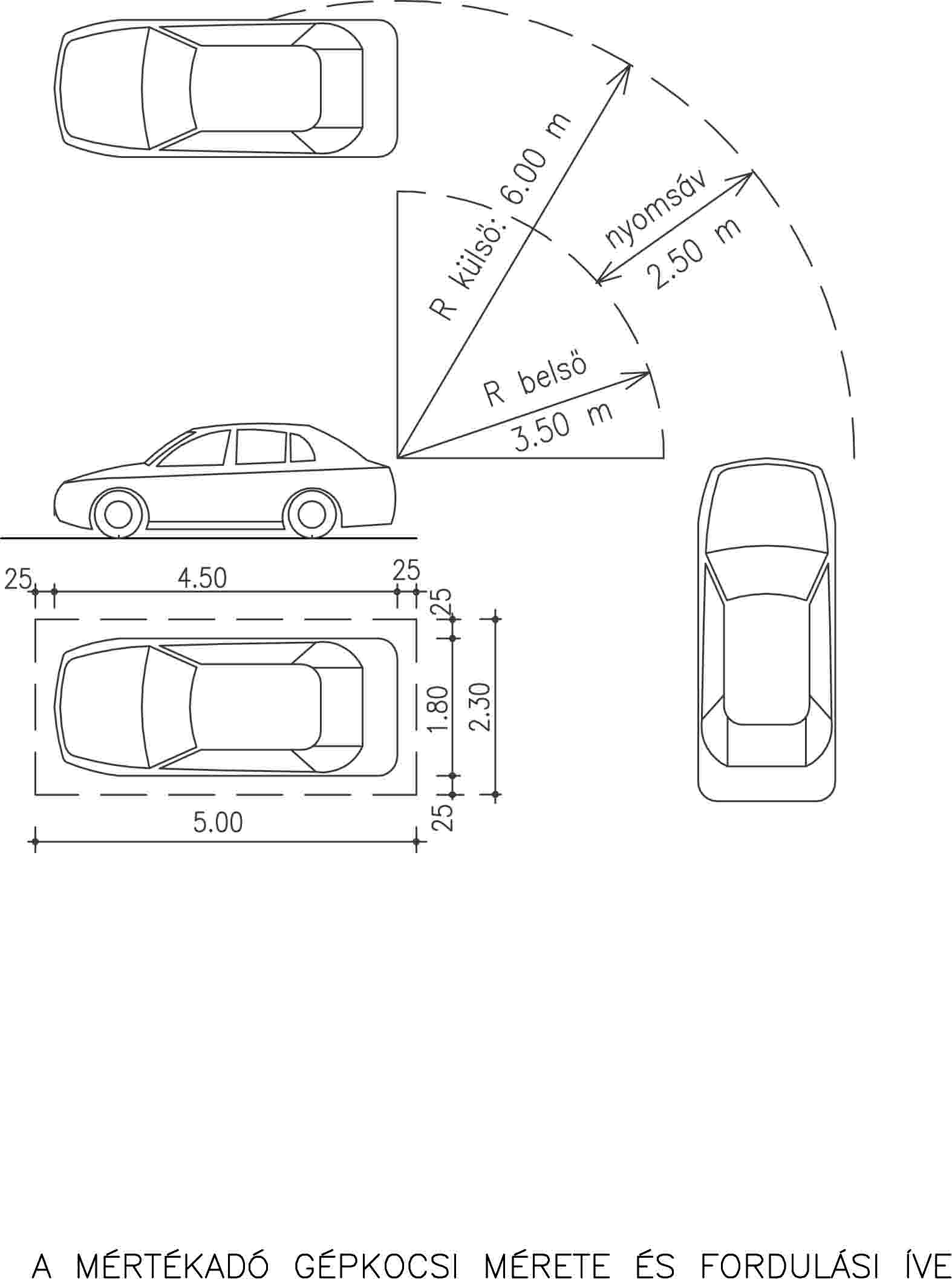
В итоге, он существенно увеличил на своей машине угол поворота колес, а также намного уменьшил радиус поворота (разворота) автомобиля.
Например, теперь с новыми ограничителями рулевой рейки его машина при повороте идет по минимально возможному радиусу
Чтобы колеса при повороте не задевали арки, детали подвески и другие компоненты машины, автор ролика установил специальные проставки на колесные ступицы для выноса колес. Благодаря чему ширина между передними колесами увеличилась. В итоге, даже существенно увеличив угол поворота колес, блогер предотвратил задевание колес о подвеску и арки.
Смотрите также: Силовое подруливание на переднеприводных машинах, способы решить проблему
Правда, в этом случае колеса автомобиля будут выпирать из под передних арок.
Как замерить угол поворота колес в своем автомобиле?
Автор видео ролика также предложил интересный способ замера угла поворота колес. Для этого необходимо сделать специальный простой шаблон из картона.
Возьмите картон, линейку, карандаш и транспортир и сделайте как на видео:
Маневренность (портальные автомобили)
Маневренность портального автомобиля характеризует его возможности выполнять все необходимые в процессе эксплуатации движения, повороты и развороты на минимальной площади и определяется габаритными размерами, особенностями конструкции, а 6 основном — радиусами поворота. К маневренности портальных автомобилей предъявляются повышенные требования, потому что процесс их погрузки и разгрузки неразрывно связан с операциями маневрирования в двух противоположных направлениях.
Принятые для характеристики маневренности обычных автомобилей минимальные радиусы окружностей, описываемых внешним передним и задним внутренним колесами, а также выступающими (габаритными) точками автомобиля, в данном случае недостаточны, так как они дают возможность оценивать маневренность только таких транспортных средств, у которых длина груза не выходит за пределы машины.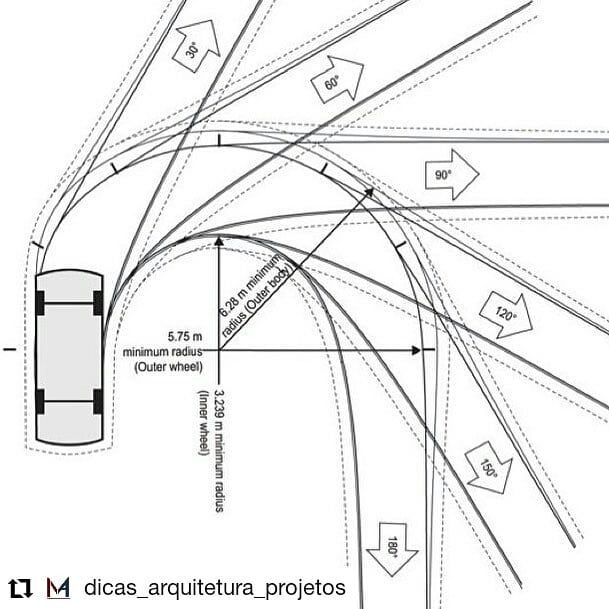 Длина аортальных автомобилей обычно значительно меньше длины перевозимого груза, вследствие чего для полной оценки маневренности этих автомобилей необходимо знать показатели их манев-
Длина аортальных автомобилей обычно значительно меньше длины перевозимого груза, вследствие чего для полной оценки маневренности этих автомобилей необходимо знать показатели их манев-
Р-ис. 35. Схема движения автомобиля с четырьмя управляемыми колесами
на повороте:
а — без груза при несовпадении следов передних и задних колес; б — без груза при совпадении следов передних и задних колес; в — с грузом при несовпадении следов передних и задних колес; г — с грузом при совпадении следов передних и задних колес
ренности без груза и с грузом. В первом случае показатели маневренности будут постоянными для определенной конструкции, во втором переменными, зависящими не только от длины груза, но и от его относительного положения по длине автомобиля, а точнее, от размеров переднего и заднего свесов.
Величину проезжей части дорог и ширину проезда определяют графически по чертежам портальных автомобилей. Если необходимая минимальная ширина проезжей части дороги (ширина покрытия) Вп для автомобиля без груза и с грузом, имеющим свесы, одинакова, то минимально необходимая ширина проезда Bnv — различна, так как движение нагруженного портального автомобиля с выступающими за его габарит свесами ограничено окружающими дорогу вертикальными препятствиями (столбы, деревья, строения и т. п.).
Рис. 36. Схема движения автомобиля с двумя задними управляемыми
колесами на повороте: а — без груза; б — с грузом; Аг и А — необходимая ширина улиц для движения автомобиля с грузом и без него; Ви ВПр — необходимая ширина проезда при движении автомобилей с грузом и без него; Вп — ширина покрытия; Ь0— габарит приближения
Минимальная ширина проезжей части дороги Вп определяется для портальных автомобилей с четырьмя управляемыми колесами как разность радиусов окружностей, описываемых боковыми поверхностями шин внешнего переднего и внутреннего заднего (по отношению к центру поворота) колес (рис. 35 и 36):
35 и 36):
Для портальных автомобилей с двумя задними управляемыми колесами минимальная ширина проезжей части с достаточной для практики точностью может быть определена из выражения
Ширина проезда Впр автомобиля без груза /или с грузом, не выступающим за раму автомобиля, определяется как разность внешнего R4 и внутреннего R3 радиусов:
(19)
Таблица 15
Параметры, характеризующие маневренность автомобилей
Параметры | о со Н | о 00 Н | >»£Q | « се ч С. О | о Ь | о ю Ь | о н | Герлингер 12RH | J и |
Число управляемых колес | 4 | 4 | 4 | 4/2 | 4 | 4 | 4 | 2 | 2 |
Габаритные размеры автомобиля в мм: | |||||||||
4480* | 4482* | 4885* | 3760 | 3580 | |||||
длина ……. | 4540 | 4480 | 4500 | 4580 | |||||
5900 | 5950 | 6310 | |||||||
ширина…… | 2234 | 2280 | 2220 | 2020 | 2530 | 2565 | 3410 | 1920 | 2290 |
высота ……. | 3450 | 3400 | 3450 | 3350 | 3400 | 3460 | 3500 | 2900 | 2820 |
База в мм . | 3500 | 3400 | 3480 | 3510 | 3400 | 3400 | 3650 | 2240 | 2440 |
Колея в мм…… | 1750 | 1850 | 1750 | 1820 | 2100 | 2100 | 2800 | 1660 | 2000 |
Конструктивные размеры портала в мм: | 1500 | ||||||||
ширина …… | 1170 | 1250 | 1200 | 1120 | 1500 | 1950 | 1140 | 1195 | |
высота……. | 1580 | 1750 | 1750 | 1650 | 1750 | 1750 | 1750 | 1370 | 1175 |
2050* | 2850* | 2450* | 3000 | 2500 | |||||
длина ……. | 2250 | 2040 | 2060 | 2700 | |||||
4500 | 4500 | 4730 | |||||||
Габаритные радиусы поворота без груза в мм: | 6300** | ||||||||
5450 | |||||||||
внешний | 6250 | 6150 | 5660 | 5400 | 6370 | 6040 | 5550 | ||
5150 | |||||||||
3750** | |||||||||
внутренний R3 | 3650 | 3550 | 3530 | 2725 | 2650 | 3200 | 1780 | 1580 | |
2700 | |||||||||
Ширина проезда без груза в мм. | 2550** 2450 | 2750 | 5700 | 4260 | 3970 | ||||
2600 | 2600 | 2130 | 2725 | ||||||
Число скоростей при движении: | |||||||||
вперед……. | 5 | 4 | 4 | 3 | 4 | 4 | 5 | 4 | 3 |
5 | 4 | 4 | 3 | 4 | 4 | 5 | 4 | 3 |
 ….. .
….. . ……
……* В числителе указана длина без рамок-прижимов и удлиненных грузозахватных башмаков; в знаменателе — с рамками-прижимами и удлиненными грузозахватными башмаками.
** В числителе приведены значения при совпадении следов передних и задних колес; в знаменателе — при несовпадении.
Радиусы Ra и Rz определяются при максимальных углах поворота управляемых колес.
Значения указанных выше параметров, характеризующих маневренность некоторых портальных автомобилей, приведены в табл. 15.
Для определения ширины проезда автомобиля, оборудованного рамками-удлинителями или удлиненными грузозахватными башмаками, а также автомобиля с грузом, выходящим за габариты автомобиля, необходимо знать величину внешнего габаритного радиуса, который замеряется по внешней по отношению к центру поворота наиболее выступающей точке автомобиля или груза.
Различают внешний габаритный радиус поворота по заднему свесу автомобиля или груза R$ и внешний габаритный радиус поворота по переднему свесу автомобиля или груза R6.
В этом случае ширина проезда определяется как разность между внешним габаритным радиусом, имеющим большую величину, и внутренним радиусом Rz:
Как видно из приведенных на рис. 35 и 36 схем поворота автомобиля с грузом, ширина проезда определяется в основном внешними габаритными радиусами поворота R5 и R6.
35 и 36 схем поворота автомобиля с грузом, ширина проезда определяется в основном внешними габаритными радиусами поворота R5 и R6.
Следует также отметить, что если у автомобилей с одинаковыми углами поворота передних и задних колес для уменьшения ширины проезда необходимо, чтобы значения радиусов Rs и Rq были одинаковые, для чего должны быть равны и свесы груза (c=d), то у автомобилей с разными углами поворота колес свес груза за ведущими колесами, поворачивающимися на меньший угол, должен быть больше.
Значения R$, Re и Rz не всегда могут быть определены при максимальных углах поворота управляемых колес, так как во многих случаях эти углы ограничиваются не кинематикой рулевого управления, а боковыми поверхностями груза. Для примера в табл. 16 приведены параметры, характеризующие маневренность различных моделей портальных автомобилей Шорланд 21 без груза и с грузом максимальной ширины. Как видно из данных табл. 16, увеличение ширины портального автомобиля (примерно на 150 мм) приводит примерно к такому же расширению проезда. Следовательно, приводимые в технических характеристиках портальных автомобилей значения радиуса поворота 7?min, базы L, колеи М и габаритные размеры практически дают возможность только сравнивать между собой маневренность различных автомобилей.
Минимальная ширина проезда автомобилей с двумя задними управляемыми колесами определяется так же, как и для автомобилей с четырьмя управляемыми колесами.
Параметры, характеризующие маневренность портальных автомобилей Шорланд 21 без груза и с грузом
Модель | ||||||
Параметры | 4265 | 4865 | 5465 | 6065 | 6665 | 7265 |
Габаритная ширина в мм….. | 2020 | 2170 | 2320 | 2480 | 2630 | 2780 |
Без груза | ||||||
Внутренний габаритный радиус R3 в мм. Радиус R& в мм……… Ширина проезда в мм…… | 2670 5 J 30 2460 | 2670 5280 2610 | 2670 5410 2740 | 2670 5560 2890 | 2670 5690 3020 | 2670 5820 3150 |
С грузом | ||||||
Внутренний габаритный радиус R3 В ММ . Радиус R4 в мм……… Ширина проезда в мм…… | 3530 5840* 2310 | 3530 5970* 2440 | 3530 6120* 2590 | 3530 6250** 2720 | 3530 6400** 2870 | 3530 6530** 3000 |
* Длина груза 5790 мм, ** Длина груза 6940 мм. | ||||||
 …………
…………Некоторые зарубежные фирмы (Валмет, Конвейенсер и др.) для улучшения условий движения на прямолинейных участках пути автомобилей с четырьмя управляемыми колесами снабжают их устройствами, фиксирующими задние колеса в положении, соответствующем прямолинейному движению, т. е. отключающими их от управления. В табл. 17 приведены сравнительные данные, характеризующие маневренность одного из автомобилей этого типа (автомобиля Шорланд 20) при четырех и двух управляемых колесах.
Таблица 17
Радиусы и ширина проезда автомобилей Шорланд 20 с четырьмя и двумя управляемыми колесами (без груза)
Модель | |||
Параметры | 4266 | 4866 | 5466 |
Четыре управляемых колеса | |||
Внешний габаритный радиус R4 в м….. Внутренний габаритный радиус R3 в м …. Ширина проезда …………… | 5,26 2,74 2,52 | 5,41 2,74 2,67 | 5,56 2,75 2,82 |
Два управляемых колеса | |||
Внешний габаритный радиус в м. Внутренний габаритный радиус R3 в м … . Ширина проезда в м…………. | 8,61 5,64 2,97 | 8,76 5,71 3,05 | 8,92 5,71 3,21 |
 ….
….В технических характеристиках портальных автомобилей обычно указывается только минимальный радиус поворота Rmin, измеренный по средней линии следа шины ведущего колеса на поверхности дороги, т. е. внутренний радиус по отношению к центру поворота. Выбор этого радиуса в качестве основного параметра для характеристики маневренности автомобиля объясняется тем, что его величина является постоянной для автомобилей одной серии и не зависит от ширины
Рис. 37. Схема отъезда автомобиля от бокового вертикального
препятствия:
а — с двумя задними управляемыми колесами; б — с четырьмя управляемыми колесами при несовпадении следов передних и задних колес; в — с четырьмя управляемыми колесами при совпадении следов передних и задних колес
портала, а предельный угол поворота ведущих колес обычно меньше, чем неведущих. Значения радиуса Rmin для различных отечественных и зарубежных автомобилей приведены в табл. 2 и 3.
У автомобилей только с двумя задними управляемыми и передними ведущими колесами минимальный радиус поворота Rmin меньше, чем у автомобилей со всеми управляемыми колесами одинакового диаметра. Это объясняется меньшей величиной их базы, большим углом поворота и меньшими размерами управляемых колес, поворот которых не ограничен элементами трансмиссии, как у управляемых ведущих колес. Поворот задних управляемых колес ограничивается только грузом, они могут подходить к его боковым поверхностям очень близко, с зазором 20—25 мм. Однако у автомобилей этого типа невозможен отъезд передним ходом от близко расположенного вертикального бокового препятствия: стены, ограды, отбойного бруса, тротуара и т. п. (рис. 37), что осложняет их эксплуатацию и является существенным недостатком. При одинаковых размерах базы, колеи и величине угла поворота внутреннего (по отношению к центру поворота) колеса наибольший габаритный радиус будет больше при задних управляемых
колесах, чем при передних, что также является недостатком автомобиля этого типа.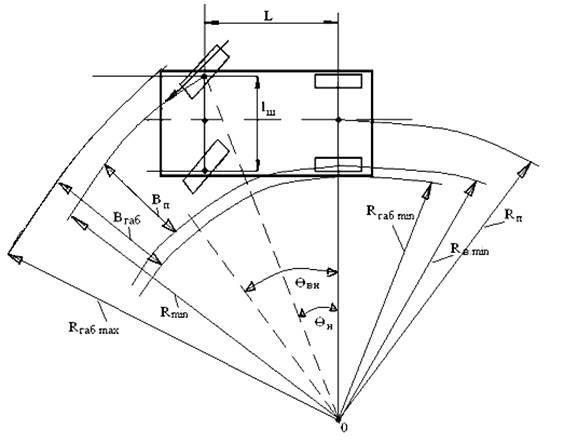 Из рис. 37 видно, что при повороте автомобиля с четырьмя управляемыми колесами траектории их движения не выходят за окружность, описываемую передним внешним колесом.
Из рис. 37 видно, что при повороте автомобиля с четырьмя управляемыми колесами траектории их движения не выходят за окружность, описываемую передним внешним колесом.
Маневренность трехосных портальных автомобилей хуже, чем двухосных, вследствие больших размеров базы. Кинематическая схема поворота таких автомобилей практически не отличается от схемы поворота автомобилей с четырьмя управляемыми колесами при совпадении следов передних и задних колес на повороте. Это объясняется тем, что у трехосных портальных автомобилей колеса средней оси в большинстве конструкций являются только ведущими, а для поворота используются колеса передней и задней осей, угол поворота которых выбирается с учетом тех же положений, что и у автомобилей с четырьмя управляемыми колесами.
На рис. 35 и 36 приведены схемы движения портального автомобиля, построенные с учетом только геометрических параметров автомобиля в предположении, что поворот осуществляется с места. Однако сразу повернуть управляемые колеса нельзя, поэтому каждая точка автомобиля и груза описывает не окружность, а более сложную траекторию, состоящую из: трех участков: входного, окружности и выходного.
Форма переходных траекторий зависит как от геометрических, так и от кинематических параметров автомобиля, т. е. угловой скорости поворота управляемых колес, его поступательной скорости движения на повороте, бокового увода шин и т. п. Поэтому ширина проезда при прямолинейном движении практически будет больше на удвоенный габарит приближения &о, учитывающий возможность случайных отклонений автомобиля от идеально прямолинейной траектории; при повороте — на величину смещения основной траектории (траектории середины автомобиля по оси ведущих колес) от теоретической. При этом следует учитывать, что при перевозках длинномерных грузов, имеющих большие свесы, поворот колес автомобиля даже на небольшой угол вызывает значительное отклонение-концов груза. Но поскольку ширина груза всегда меньше ширины автомобиля, а скорость его при подъезде к местам погрузки и разгрузки невелика, габарит приближения в прямолинейном проезде может быть принят в пределах 0,4—0,6 м.
Режим движения на повороте во многом зависит от эксплуатационных условий (скорости движения, радиуса поворота и т. д.), а в основном от быстроты поворота управляемых колес от положения, соответствующего прямолинейному движению, до положения, соответствующего движению по окружности. Вследствие того, что портальные автомобили быстрее, чем обычные автомобили, а тем более автопоезда, начинают*
движение по окружности, отклонение их фактической траектории от теоретической меньше, чем у других транспортных средств общего назначения.
Поскольку режим движения на повороте зависит от быстроты поворота управляемых колес, его принято характеризовать режимным коэффициентом kv, определяющим угол поворота колес автомобиля у0 на единицу пройденного пути s0 по основной траектории:
Обычно время, необходимое для полного поворота колес портального автомобиля при скорости движения на повороте не более 10 км/ч, составляет 2,0—3,0 сек, а значение kv находится в пределах 0,06—0,12 рад/м.
Маневренность портального автомобиля зависит также и от многих других эксплуатационных факторов, в частности от расстановки подлежащих транспортировке грузов. Наиболее удобна расстановка пакетов, контейнеров и других грузов «в елку», когда угол между продольными осями груза и улицы составляет 30—35°. Уменьшение этого угла удлиняет фронт погрузки; увеличение — ухудшает условия наезда и увеличивает ширину фронта погрузки.
Не меньшее значение для маневрирования при наезде на груз имеет расстояние между двумя смежными пакетами или контейнерами /. Установлено, что расстояние
где 5 — зазор между автомобилем и подпакетной подставкой смежного пакета или смежным контейнером, равный 140—300 мм.
Что такое радиус поворота и на что он влияет
09.08.2019
Радиус разворота является одним из основных характеристик любого авто. Производителя, продвигая свои авто на рынке всячески стараются указать на малый радиус разворота, что свидетельствует о маневренности той или иной модели. Однако указываемые производителями значения не всегда корректны. Более того, само понятие радиуса разворота является весьма условным и предполагает несколько трактовок.
Однако указываемые производителями значения не всегда корректны. Более того, само понятие радиуса разворота является весьма условным и предполагает несколько трактовок.
Необходимо разобраться с самим понятием. Оно заключается в длине радиуса, который описывает автомобиль при повороте на 180 градусов при максимально вывернутом руле. Соответственно, полученное значение говорит о маневренности авто, его способности развернуться за один раз на дороге без необходимости сдавать назад и повторять маневр.
Для выяснения данного значения используются две техники. Это методика «от бордюра до бордюра» и методика «от стены до стены«. Особенности каждой техники замера следует рассмотреть подробнее:
- В первом случае речь идет о размере полуокружности, который необходим для поворота колес на 180 градусов. Размер определяется путем отметки мелом на асфальте точки, в которой находится внешнее колесо, то есть колесо, которое расположено ближе в правому краю дороги. После чего, водитель максимально выкручивает руль и поворачивает. Когда авто развернулось на 180 градусов, отмечается точка, в которой оказалось то же колесо;
- Методика «от стены до стены» является более объективной. Ведь не всегда получается встать колесом точно в краю дороги перед разворотом. Например, при высоких бордюрах этому будет мешать передний свес. Ведь бампер просто не позволит выполнить маневр по наименьшему радиусу. Соответственно, в данном случае замеры проводятся путем крепления мела к элементу, зафиксированному на углу капота. После чего, выполняется разворот и замеряется расстояние между начальной и конечной точкой. Оно будет на порядок больше, чем в первом случае.
К примеру, компания Тойота представляя обновленный внедорожник Ленд Крузер Прадо в рекламе указывала, что данная модель сохранила небольшой радиус разворота в 5,8 метра. Между тем, длина данной модели составляет 4,8 метра. При таких габаритах выполнение разворота на 180 градусов в реальных условиях просто невозможно.

Представляется более реалистичной оценка радиуса разворота данная указанной модели в одном австралийском журнале. Там отражен радиус разворота в 11,6 метра. Этот показатель более реалистичен.
Если необходимо уменьшить радиус поворота, то это не удастся сделать без утраты нормальной работоспособности автомобиля.
Что такое радиус разворота, каким он бывает, и почему он важен?
Что такое радиус разворота
Уже из названия характеристики можно догадаться о её сути. Под этим параметром подразумевается полуокружность, которую описывает автомобиль во время манёвра при полностью вывернутом рулевом управлении. Знать это значение нужно обязательно. Более того, необходимо отличать разворот по малому и большому радиусу.
Схематичное изображение поворота авто
Некоторые производители указывают в качестве радиуса разворота два параметра, разделённых между собой дробью. Минимальный показатель поворота автомобиля соответствует следу от наружного колеса, который оставляет транспортное средство при манёвре. Такой показатель называется «от бордюра до бордюра». Это значение не учитывает размеры переднего свеса, от длины которого зависит точность показателя.
На практике удобнее использовать другое значение — радиус «от стены до стены». В этом случае учитываются препятствия, которые входят в минимальное пространство по наружным габаритам и могут быть задеты бампером. Но и на этом ещё не всё. Существует ещё один нюанс, который нужно учитывать водителю при езде в ограниченном пространстве.
Значение для авто с прицепом
При повороте некоторая часть кузова смещается во внутреннюю сторону. Потому при выезде со стоянки нельзя резко выворачивать руль до предельного положения. При таких действиях можно задеть соседний автомобиль. Чтобы понять какой радиус нужен для разворота, необходимо определить минимальный габаритный коридор для своей машины. Для этого нужно знать расстояние, которое отделяет максимальную и минимальную окружности.
Такая осведомлённость позволит не только без проблем маневрировать в сложных условиях и делать правильные манёвры на узкой дороге, но и выполнять поворот на дороге согласно разъяснениям ГИБДД 2020 года.
Насколько важен параметр
Современным водителям приходится ездить в непростых условиях: машин много, а места для них часто не хватает. Особенно это касается парковочных мест в больших городах и людных местах. Часто водителю приходится втискиваться между машинами впритык и выполнять сложные манёвры среди других автомобилей.
Радиус поворота отображает маневренность автомобиля, его способность выполнять повороты на узкой дороге и в ограниченном пространстве. Чем меньшим является этот параметр, тем более комфортным и простым будет управление ТС во время передвижения в ограниченном пространстве. Если известен радиус разворота и ширина дороги, то можно путём проведения несложных расчётов узнать вероятность осуществления манёвра за один раз.
Производители автомобилей обязательно указывают интересующее нас значение для каждого автомобиля. Этот показатель можно найти в практическом руководстве или техническом описании. Но здесь может ждать подвох. Многие производители указывают минимальный показатель — разворот по малому радиусу. Это позволят им представить своё творение более маневренным, чем есть на самом деле. Чтобы узнать действительный показатель, необходимо учитывать размеры свеса автомобиля.
Сравнение показателей маневренности с разными прицепами и без них
Как измеряем
Мы уже говорили выше о двух значениях, которые отображают радиус поворота автомобиля. Для вычисления каждого из них используются разные методы.
- Для вычисления параметра «от бордюра до бордюра» необходимо при помощи мела сделать отметку начального положения наружного колеса. Выворачиваем руль пока он не примет граничное положение, разворачиваем автомобиль на 180 градусов. Отмечаем конечное положение колеса. Между полученными отметками измеряем расстояние.
 Половина от этого результата будет отражать искомое значение. Он будет обозначать необходимую ширину дороги, которая потребуется для разворота авто.
Половина от этого результата будет отражать искомое значение. Он будет обозначать необходимую ширину дороги, которая потребуется для разворота авто. - Более реальное значение отображает характеристика «от стены до стены». Для её вычисления потребуется зафиксировать стержень на наружном углу бампера. На стержне крепится мел и выполняется разворот машины, как это делалось в предыдущем случае. Получится полуокружность, в которой потребуется измерить диаметр. Половина этого значения будет отражать нужный нам радиус разворота машины.
В свободном доступе имеются таблицы с радиусом разворота легкового автомобиля. Также найти нужный показатель для конкретной марки машины можно в руководстве по эксплуатации и техническом описании
В любом случае, на этот параметр нужно обращать внимание. Эти знания позволят избежать неприятных ситуаций на дороге и паркинге
Лучшие цены и условия на покупку новых авто
Как измерить радиус поворота автомобиля
Чтобы рассчитать радиус поворота автомобиля, можно использовать два способа: «от бордюра до бордюра» либо «от стены до стены».
В первом случае мы получим значение радиуса полуокружности, описываемой колесами машины, когда она разворачивается. Таким образом, для измерения необходимо сделать меловые отметки стартового положения внешнего колеса. После этого выворачиваем рулевое колесо до предела и совершаем поворот на 180°. Снова делаем меловую отметку конечной точки. Затем измеряем расстояние между отметками, делим получившиеся число на 2. С помощью данного способа можно узнать, какая минимальная ширина дорожного полотна должна быть, чтобы можно было совершить разворот.
Нельзя забывать про то, что у машины есть передний свес (промежуток от оси передних колес до конца переднего бампера). И когда дорожное полотно ограничивается бордюром с большой высотой, водитель не сможет совершить разворот, даже если уложится в радиус «от бордюра до бордюра». Произойдет следующее: машина упрется передним бампером в препятствие.
Поэтому, чтобы узнать настоящий показатель радиуса, придется измерять его по способу «от стены до стены». Как это делается? Мел закрепляют на стержне, который размещен на наружном углу бампера (по отношению к повороту). После этого водитель разворачивается и замеряет диаметр полученной полуокружности. Затем полученное число делится на 2.
Так как производители авто хотят, чтобы их творения выглядели наиболее маневренными, то в характеристиках и рекламных проспектах обычно указывают радиус поворота «от бордюра до бордюра». Ведь его значение меньше по сравнению с показателем «от стены до стены». На практике же, если вам нужно выбрать наиболее маневренный автомобиль, важно учесть также и длину переднего свеса.
Обратите внимание!
Есть одна особенность, которая связана с радиусом поворота легкового автомобиля. На самом деле это понятие используется в разговорной речи. Потому что настоящий параметр, который отражает расстояние, требуемое для совершения маневра от упора до упора, — диаметр. Поэтому в габаритных и технических характеристиках обычно указан именно диаметр. Здесь важно не запутаться в этих понятиях.
Нередко даже автопроизводители допускают ошибки. Так, в пресс-релизе нового «Ленд Крузер Прадо» в «Тойота» отметили, что машина сохранила отличный диаметр разворота, который составляет только 5,8 метров. Но это нереально, потому что длина автомобиля 4, 84 метра.
Но если вы изучите рекламный проспект к этой машине, то там уже будет сказано «минимальный радиус разворота автомобиля по колесам», это уже соответствует действительности. Для подтверждения этого просто зайдите на официальный портал. Там отмечен именно диаметр, а не радиус поворота легкового автомобиля, который составляет 11,6 м.
Советы дальнобойщику
Управлять фурой так же трудно, как водить корабль по морю, здесь нужны навыки, многолетний опыт и профессионализм:
- Никаких резких движений – сзади груз, который превосходит массу тягача. Его инерция толкает машину вперед, и это нужно постоянно помнить, потому что резко изменить направление проблематично.
- Опасный момент вождения – это повороты, т. к. ведомая конструкция стремится по инерции вперед, что чревато складыванием пополам. Не стоит делать резких движений, а только плавно управлять техникой и не «газовать».
- Когда выпадают осадки, то такие физические законы, как трение – не действуют, поэтому нужно правильно выбрать скорость пропорционально качеству дорожного полотна.
- При поворотах на перекрестках помните, что водители соседних машин начинают движение раньше, чем задняя часть автопоезда проедет мимо. Не ленитесь посмотреть в зеркала, чтобы исключить столкновение.
- Помните, что лихачи совершают рискованные обгоны, занимая освободившееся место между двигающимся транспортом. В случае экстренной ситуации нарушители успеют затормозить, а у вас сзади груз, так что мгновенно остановиться не получится.
- Следует постоянно помнить, что у полуприцепа самостоятельная траектория движения, поэтому выбирайте радиус немногим больше, чтобы исключить выезд его за линию дороги.
- Не стоит обгонять, когда не просматривается впереди лежащая дорога, резко свернуть или затормозить уже не получится.
Надеемся, что приведенные в статье рекомендации по прохождению сложных участков дороги помогут дальнобойщикам избежать нарушений ПДД. Помните, что опытный шофер видит далеко, а профессионал уверенно контролирует ситуацию вокруг управляемого транспортного средства.
Берегись длинномера — Автоцентр.ua
По мнению водителей легковых автомобилей, ездить в городе очень сложно из-за того, что мешают неповоротливые грузовики и автобусы. Но в ряде ситуаций последние по-другому ездить не могут. Почему? Давайте разберемся. Заранее оговоримся: о хамах здесь речь не идет.
По мнению водителей легковых автомобилей, ездить в городе очень сложно из-за того, что мешают неповоротливые грузовики и автобусы. Но в ряде ситуаций последние по-другому ездить не могут. Почему? Давайте разберемся. Заранее оговоримся: о хамах здесь речь не идет. |
| Консультант Владимир Левчук. Водитель-инструктор учебно-производственного (категории «С», «Е»), водительский стаж 36 лет |
Претензии водителей легковушек:Грузовые автомобили, особенно большегрузные автопоезда, заполонили улицы городов. Они выезжают не только в разрешенный п.11.6 ПДД второй ряд, но и в третий. С включенным правым поворотом грузовики сначала уходят влево, а затем поворачивают направо, несмотря на то, что по первому ряду едут легковые машины. Тормозят они медленно, остановившийся автобус не объезжают, а ждут, пока тот отъедет от остановки.
Причины:К сожалению, склады, базы и прочие отправители и получатели грузов нередко размещаются в черте города, и водители грузовиков вынуждены на улицах ждать своей очереди разгрузиться. Транзитные машины могут двигаться в объезд далеко не всех городов.
Автопоезд и по ровной дороге вести сложнее, чем легковушку, а в городе во время интенсивного движения – это тяжелый труд.
Даже если у грузовика есть дополнительные зеркала, все равно во время крутого поворота не всегда увидишь легковую машину, объезжающую справа или слева, так как мертвые зоны зеркал у него намного больше.
Когда поворачиваешь направо из второго ряда, водители легковушек часто пытаются проскочить по первому ряду и попадают под грузовик. Нередко они вклиниваются в свободное пространство перед машиной, не учитывая, что затормозить можно и не успеть, ведь тормозной путь у грузовика больше.
Во втором ряду грузовикам мешают маршрутные автобусы и такси, поэтому фуры вынуждены выезжать в крайний левый ряд. Повернуть направо из крайнего правого ряда грузовики с прицепами не могут.
Ведь у большинства современных автопоездов наименьший наружный радиус поворота составляет около 12,5 м, а внутренний – 5,3 м, следовательно, для такого маневра требуется полоса шириной около 7 м (а это практически две полосы движения).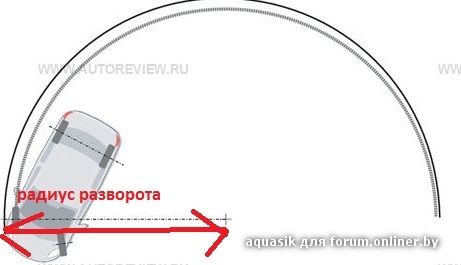
Встретив препятствие на своей полосе, грузовик вынужден начинать объезд заблаговременно и из-за большой ширины габаритного коридора частично выезжает на встречную полосу или в третий ряд.
Автобусы
| Консультант Василий Зименко. Водитель городского автобуса, водительский стаж 28 лет |
Мнение водителей легковушек:Городские автобусы едут медленно, еле-еле разгоняются и не спеша тормозят.
Они могут остановиться для высадки пассажиров во втором ряду. Отъезжая от остановки, они просто включают указатель поворота и начинают медленно высовываться, вытесняя подъезжающий транспорт. Могут повернуть направо из среднего ряда.
Причины:Длина современных городских автобусов – 10–17 м. В салоне может находиться до двухсот пассажиров, из них больше половины – стоят. Это существенно ограничивает как возможность интенсивного разгона – торможения, так и устойчивость автобуса.
Правая полоса часто занята припаркованными (в том числе в непосредственной близости от остановки) легковыми автомобилями. Так как автобус довольно неповоротлив, он просто не может въехать в оставшийся возле остановки свободный участок.
Раньше в ПДД было записано, что отъезжающий от остановки автобус пользуется преимуществом, а теперь – только если остановка в специальном кармане. А из-за припаркованных машин получается такой же карман, но пропускают очень редко.
При повороте автобусу также нужно много места, и поворачивает он гораздо медленнее, чем легковушка. Почему? А вы вспомните себя в качестве пассажира в переполненном автобусе. Ведь все претензии высказываются не тому водителю, машина которого стала причиной резкого торможения или маневра, а тому, который рядом.
У сочлененных автобусов некоторых моделей при повороте «хвост» выносит в сторону, противоположную направлению поворота, что для многих непривычно. На скоростях 50–60 км/ч у старых машин «хвост» может немного вилять из стороны в сторону. Поэтому слишком близко к ним прижиматься не стоит.
Поэтому слишком близко к ним прижиматься не стоит.
Троллейбусы
| Консультант Марина Гладышева. Начальник колонны, стаж водителя троллейбуса 28 лет. |
Претензии водителей легковушек:Троллейбусы ездят еще хуже больших автобусов. Они притормаживают посреди дороги, смещаются то вправо, то влево. Иногда перекрывают второй ряд возле какого-нибудь грузовика, и проехать вообще невозможно!
Причины:Все перечисленное – не вина водителей, это специфика данного транспортного средства. Водитель троллейбуса везет людей, поэтому не может резко тормозить или маневрировать. Кроме размеров, возможности маневра для водителя троллейбуса ограничивают расположение контактной сети и размеры токоприемников.
Троллейбус может отклониться от контактной сети не более чем на 4 метра. Иногда грузовики останавливаются под контактной сетью, и водитель не в состоянии их объехать, поскольку цепляет за фургон штангами или канатами.
На стрелках (участки, где контактные провода сходятся или расходятся) водитель троллейбуса должен снижать скорость и проезжать это место, тормозя или разгоняясь – в зависимости от того, куда нужно повернуть. Зимой на остановках и под стрелками очень скользко, и троллейбус может занести.
Водители троллейбусов вынуждены ехать прямо из правого ряда, где движение остальным участникам – только направо. Отъезжая от остановки, водитель вынужден контролировать и ситуацию справа, чтобы не травмировать тех, кто может догонять троллейбус.
Зимой из-за особенностей характеристики крутящего момента электродвигателя при трогании с места буксование наступает гораздо быстрее, чем у других ТС. Результат – скользкие участки возле остановок и возможные заносы при трогании с места или торможении при подъезде.
Что делать?
Чтобы не усложнять друг другу жизнь, прежде всего давайте соблюдать ПДД. Будем пытаться что-то доказать или считать себя умнее всех – ни к чему хорошему это не приведет.
Водителям легковых авто нужно учитывать особенности вождения большегрузных автомобилей, автобусов и троллейбусов. Не подрезайте большегрузы, не пытайтесь протиснуться между ними и тротуаром. Притормозите и пропустите водителей маршрутных транспортных средств.
ЭТО ИНТЕРЕСНО: Типы автобусов
А вы, тяжеловесы, не забывайте, что остальные тоже не просто катаются. Для многих автомобиль – такой же инструмент для работы, как авторучка или компьютер.
Александр Ландарь Фото Андрея Яцуляка
Источник: https://www.autocentre.ua/avtopravo/avtoshkola/beregis-dlinnomera-286098.html
Особенности маневрирования
Водители-дальнобойщики обладают специфической подготовкой: уверенно входят в повороты на трассе и во время перемещений по городу, при прохождении перекрестков, потому что движения отработаны до автоматизма на специальных дорожках автодрома, как показано на этом видео:
Такой термин, как радиус разворота фуры должен учитываться при разработке подъездных путей к складским помещениям и местам разгрузки крупнотоннажного автомобильного транспорта. А разворотная площадка для фуры должна соответствовать утвержденным стандартам, чтобы большегрузный автомобиль мог уверенно маневрировать на выделенной для этих целей территории.
Таблица ширины площадки для ТС (транспортных средств)
| Тип авто | Длина ТС в м | Ширина площадки, м |
| Камаз | 10 | 22 |
| Еврофура | 18 | 38 |
Радиус разворота еврофуры
Европейские стандарты регламентируют ограничения по длине, например, для седельного автопоезда этот параметр – 16,5 метра. Размеры полуприцепа: 12 м от оси ССУ до кормовой части и 2,1 м до переднего бампера.
Стандартный радиус разворота еврофуры, например, на 180 или 360 градусов внутри воображаемой площади, которая составлена двумя окружностями с R = 12,5 м и 5,3 м, должен свободно выполняться при условии, что выступающие части машины не пересекают обозначенные границы во время маневрирования.
Схематическое изображение радиуса разворота фуры
Радиус поворота «американца»
Тягачи с полуприцепами, разработанные американскими конструкторами, называют траками, а маневренность, особенно во время проезда по городу, ограниченная из-за большого линейного размера. Для поворота на 90 градусов такому крупногабаритному транспортному средству требуется в 2 раза больше радиуса, чем европейским аналогам. Поэтому иногда приходится видеть такие ситуации, как на фото.
Неправильный разворот фуры
В городской черте такие автомобили не могут осуществлять безаварийное движение, чтобы постоянно не нарушать ПДД, затрудняют перемещение другого автотранспорта, т. к. их длина не соответствует европейским стандартам. Владельцы легковых автомобилей вынуждены держаться на расстоянии от «американцев», чтобы не попасть под удар разворачивающегося «монстра».
Радиус разворота КАМАЗ 5410 | КАМАЗ
ДАГЕСТАН — БЕДНЫЙ КАМАЗ
КАМАЗ 4326 автодом / Камаз для зимней рыбалки
КАМАЗ-65115-776058-42 (аналог МАЗ-5516Х5-472-000) — самосвал с задней разгрузкой 14,5 т
разворот грузовика
МАЗ для SpinTires №1
Euro truck simulator 2 обзор Камаз 6460
Экскаватор-погрузчик ELEX 81A
Движение с прицепом задом – Показывают мастера. А вы уже так можете?
Также смотрите:
- Ремонт блока цилиндров двигателя КАМАЗ видео
- Как поставить сигнал от КАМАЗа на легковушку
- Болты крепления телеги КАМАЗа
- Рама тягача КАМАЗ
- Электрический предпусковой подогреватель двигателя КАМАЗ
- Как снять форсунку с cummins КАМАЗ
- Тоо КАМАЗ евро сервис
- Что такое КАМАЗ ацн
- Как подкручивать спидометр на КАМАЗе
- Описание комбинации приборов КАМАЗ евро 3
- КАМАЗ 6460 экспорт
- Первичный вал КПП урал под делитель КАМАЗ
- Помпа подкачки дизельного топлива КАМАЗ
- Система автоматической смазки КАМАЗ
- Нтц КАМАЗ мастер
Главная » Новости » Радиус разворота КАМАЗ 5410
kamaz136.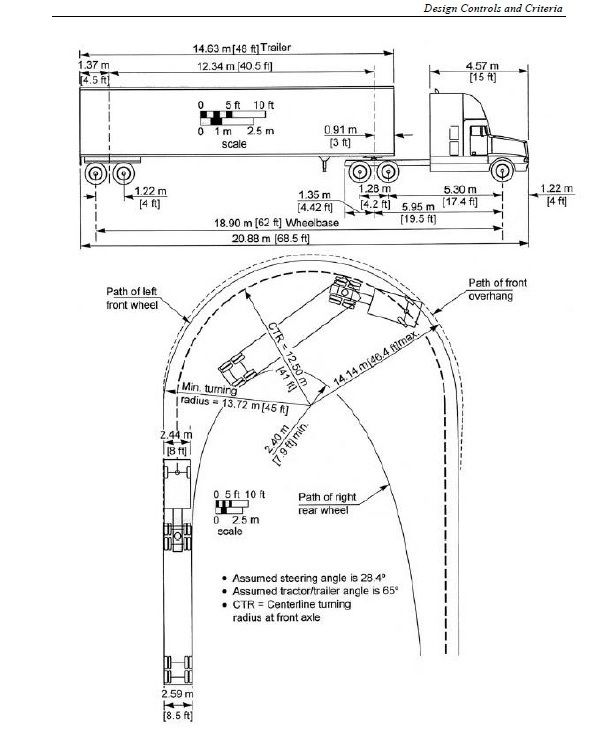 ru
ru
Как измеряем
Измерить радиус можно просто: отмечаем стартовое положение одного колеса (наружного), выворачиваем до конца рулевое колесо, разворачиваемся на полные 180 градусов, отмечаем конечное положение того же колеса. Между отметками замеряем расстояние, половина его и будет радиусом разворота. Этот размер является минимальной шириной дороги (именно гладкой части), которая позволит развернуться в один заход.
Это в теории, на практике же придётся учитывать и размер переднего свеса автомобиля, это расстояние от передней оси до кончика бампера. Дело в том, что ширина дороги не всегда ограничена низким бордюром, частенько бывают отбойники, а также сами бордюры могут быть до метра высотой. И если радиус разворота хорошо вписывается в идеальную дорогу, то с высокими ограничителями можно не вписаться. Так вот реальный радиус измеряется чуть сложнее – необходимо на наружной стороне бампера установить свес с мелом (можно на стержне), после разворота мел оставит отметки о реальном радиусе.
Радиус разворота на парковке
Радиус разворота КАМАЗа 5320 | КАМАЗ
ДАГЕСТАН — БЕДНЫЙ КАМАЗ
Камаз с прицепом не вписался в поворот и свалился в кювет
Регулировка начала впрыска топлива
Въе*ало колеса на тракторе Т-150К на культивации.Blast wheels on the tractor T-150K
Динамометрический ключ. Момент затяжки.
Рулевое управление
Как работает рулевое управление в автомобиле
Даг-тюнинг в Северодвинске
Как узнать что рулевое управление автомобиля сломано.Видео обзор.
Также смотрите:
- Ремонт передней подвески автомобиля КАМАЗ
- Навароты на КАМАЗе
- Правильно настройка ТНВД бош на КАМАЗ двигатель
- Прошивка на КАМАЗ камминз
- Фара КАМАЗ евро 3 на волгу
- Как правильно ставить тормозные колодки на КАМАЗе
- Система смазки клапанов КАМАЗ
- КАМАЗ 5350 водяной насос
- Кузов КАМАЗ 55111 вес
- КАМАЗ 5350 какой двигатель
- Какой зерновоз лучше маз или КАМАЗ
- Регулировка электромагнитного клапана прицепа КАМАЗ
- Кронштейн реактивной тяги КАМАЗ 5320
- Тюнинг на КАМАЗе своими руками
- Почему тяжело заводится КАМАЗ
Главная » Лучшее » Радиус разворота КАМАЗа 5320
kamaz136.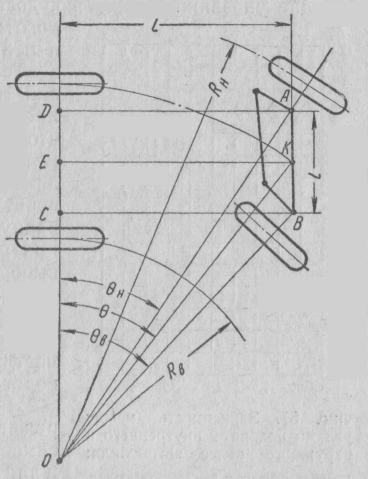 ru
ru
Рекомендуемые параметры расчетных автомобилей для Российской Федерации
Библиографическое описание:
Абдуназаров Ж. Н., Мамарасулова М. Н. Рекомендуемые параметры расчетных автомобилей для Российской Федерации // Молодой ученый. 2016. №7.2. С. 26-29. URL https://moluch.ru/archive/111/27588/ (дата обращения: 23.07.2019).
В связи с повышением динамических характеристик автомобилей совершенствуются требования к строительству и проектированию автомобильных дорог. При проектировании дорог возникает необходимость введения понятия «расчетный автомобиль». Этот термин определяется по-разному .
«Расчетный автомобиль – это транспортное средство, используемое для определения геометрических параметров автомобильных дорог (минимальные радиусы поворота пересечения в одном уровне, кольцевые пересечения), влияющих на безопасность, пропускную способность и стоимость пересечения. Это – условная транспортная единица, параметры которой используют в расчетах дорожной одежды и ее элементов».«Расчетный автомобиль – это такой автомобиль, массу, размеры и динамические качества которого используют при проектировании автомобильной дороги. Такие параметры расчетного автомобиля, как размеры и минимальный радиус поворота, должны быть такими же, как и у большинства других автомобилей этого же класса, которые предположительно будут использовать для движения проектируемую дорогу».
При проектировании автомобильных дорог и парковочных мест возникает необходимость определять ширину проездов, величину маневровых площадок, геометрические параметры. Это требует в каждом конкретном случае построения динамического габарита расчетных автомобилей, которое является процессом трудоемким (особенно для автопоездов) и не в достаточной мере освоенным проектировщиками.
Отсутствие систематизированного справочного материала по этим вопросам зачастую является причиной необоснованных проектных решений, которые либо ведут к завышению сметной стоимости объектов, либо не обеспечивают нормальных эксплуатационных условий работы автотранспорта.
Нами было исследован и изучен состав транспортных средств, передвигающихся по российским автомобильным дорогам, и разделен на следующие группы:
1. Легковой автомобиль;
2. Грузовой автомобиль;
Автобусы разделены на три типа: городской автобус, пригородный автобус, сочлененный автобус; автопоезда – два типа по длине.
Исходя из проведенных исследований нами были предложены параметры рекомендуемых расчетных автомобилей для проектирования автомобильных дорог. Были учтены не только длина и ширина расчетного автомобиля, но и база, передний свес, задний свес, который играет немаловажную роль при определении минимального радиуса автомобильной дороги (табл.1).
Размеры рекомендуемых расчетных автомобилей
Тип расчетного автомобилей
Габаритные размеры КамАЗов
Давайте рассмотрим каждые модели отдельно.
Габаритные размеры КамАЗа самосвала двухосного 43255
| Технические характеристики | Значение |
| Грузоподъемность, тонн | 7 |
| Объем платформы кузова, м 3 | 6-6,5 |
| Топливный бак, л | 210 |
| Длина, мм | 6090 |
| Ширина, мм | 2500 |
| Высота, мм | 2920 |
Данная спецтехника может использоваться коммунальными службами, ЖЭКХ, а также небольшими строительными фирмам. Важно заметить, что данные устройства плохо транспортируются по гравию, песку и бездорожью.
Габаритные размеры КамАЗа 55111
Габаритные размеры КамАЗа 55111
| Технические характеристики | Значение |
| Грузоподъемность, тонн | 10 |
| Длина, мм | 6680 |
| Ширина, мм | 2500 |
| Высота, мм | 2740 |
Габаритные размеры КамАЗа 6522
Трехосный полноприводный КамАЗ самосвал 6522 используется, если дорожные условия крайне тяжелые.
| Технические характеристики | Значение |
| Грузоподъемность, тонн | 13,4 |
| Объем платформы кузова, м 3 | 12 |
| База | 3600+1440 мм |
| Длина, мм | 7800 |
| Ширина, мм | 2500 |
| Высота, мм | 3280 |
Габаритные размеры КамАЗа 65111
Полноприводной КамАЗ самосвал 65111 — техника с повышенной проходимостью.
| Технические характеристики | Значение |
| Грузоподъемность, тонн | 14 |
| Объем платформы кузова, м 3 | 8,2 |
| База | 3340+1420 мм |
| Длина, мм | 6690 |
| Ширина, мм | 2500 |
| Высота, мм | 2955 |
Габаритные размеры КамАЗа 6540
Четырехосный КамАЗ самосвал 6540 это большегрузная техника, характеристики которого приведены в таблице.
| Технические характеристики | Значение |
| Грузоподъемность, тонн | 18,5 |
| База | 1800+2080+1320 мм |
| Длина, мм | 7640 |
| Ширина, мм | 2500 |
| Высота, мм | 3020 |
Рекомендации по подбору устройства
Перед покупкой устройства необходимо обязательно знать цель, то есть для чего вы его покупаете, для каких работ вы хотите его использовать. Будьте внимательны: обычный дорожный самосвал и, например, карьерный, который имеет повышенную проходимость, — это две разные техники, которые обладают различными техническими характеристиками, могут выполнять разные работы, изготавливаются для разных целей.
Первый и главный критерий при выборе модели — это технические показатели конструкции.
Среди них нужно обращать внимание на мощность, объем кузова, размеры кузова, грузоподъемность, удобство в управлении и эксплуатации, тип кабины.
Второй критерий — это надежность, а также простота эксплуатации. Вы должны выбирать такую спецтехнику, которую не нужно будет уже через полгода ремонтировать и вкладывать немалые средства в сервис.
Третий критерий — это цена. Безусловно, вы не хотите переплачивать за устройство только из-за известности его бренда.
Обратите внимание: комфорт в кабине водителя — это также один из самых важных факторов, есть отдельные модели, оснащенные кондиционерами.
Безусловно, это комфортно для водителей автомобилей.
Также стоит учитывать наличие подогрева платформы, эргономичность сидения, радиус поворота и маневренность, обогрев зеркала и кузова, устойчивость машины.
Все самосвалы Камского автомобильного завода имеют свои достоинства и недостатки, но все равно можно подобрать подходящую модель под реализацию каждого вида строительных работ. Можно найти отличный вариант, который будет сочетать в себе золотую середину качества и стоимости.
Давайте рассмотрим преимущества и недостатки одной модели самосвала — 65115.
Это отличный вариант, который можно использовать при выполнении монотонных работ в городе и на строительных площадках. Отличается экономичностью, надежностью. Может использоваться при любой погоде, включая низкие температуры. Имеет высокую проходимость. Ему характерна простота обслуживания, двигатель, если нормально использовать, нужно ремонтировать крайне редко. То есть, делаем вывод, что данная модель — это отличная коммунальная техника, а именно мусоровоз. Что касается недостатков, то это высокий расход бензина и капризный двигатель, который совершенно не переносит перегревов. Важно заметить, что при покупке данной модели, вам может попасться конструкция с бракованным топливным насосом и турбиной. Спецтехника сложно преодолевает длинные расстояния.
Прохождение поворотов
Умудренные опытом дальнобойщики чувствуют габариты автотранспортного средства, состоящего из тягача и полуприцепа с неуправляемой тележкой, а также возникающие сложности, связанные со смещением последней при вхождении в поворот.
Изящное прохождение перекрестка
Гораздо больше внимания водителю фуры требуется при выполнении маневрирования в черте города, где интенсивное движение пешеходов, а также легкового и общественного транспорта. Особо надо отметить сложности при проезде развязок и перекрестков – все необходимые маневры по изменению направления и смены полосы движения нужно выполнить заранее, но не ближе, чем за 20 метров от начала развязки или пересечения дорог.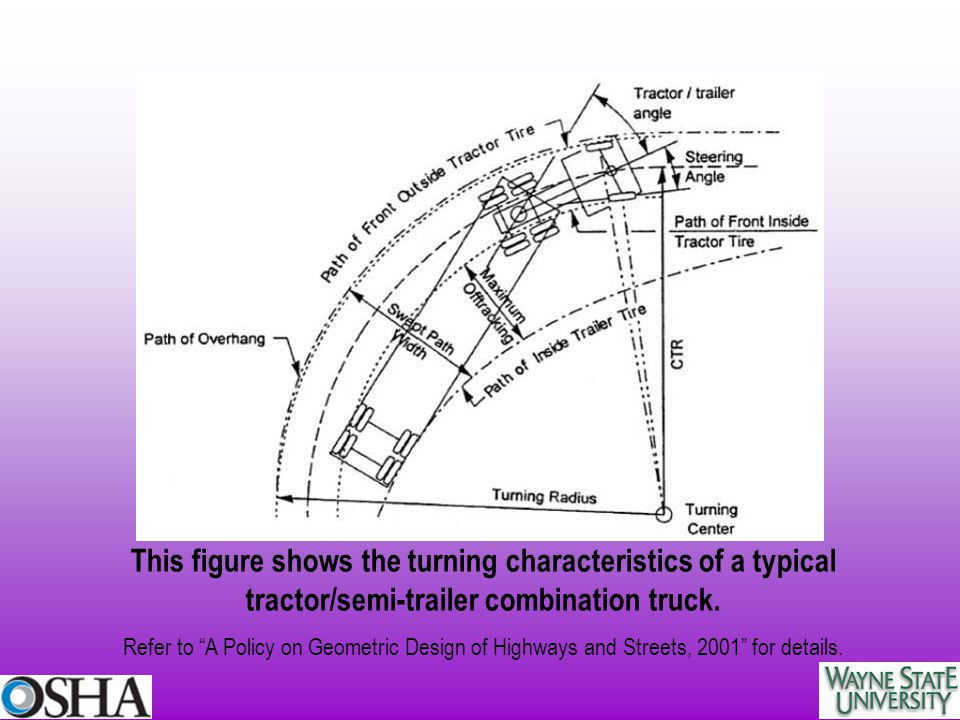
Выполняя поворот направо, следует обратить внимание на встречную полосу дороги, т. к
автопоезд часто выезжает на нее, чтобы избежать заезда колесами тележки полуприцепа на бордюр, создавая угрозу травматизма пешеходов. При левом повороте не нужно стремиться проезжать центр перекрестка, потому что увеличивается площадь разворота, что затрудняет другому транспорту движение в нужную сторону.
Погрешности в повороте
Радиус разворота КАМАЗа равен | КАМАЗ
К-700, К-701, «Кировцы» в грязи и снегу! Глаза боятся а «Кирюша» К-700 едет! Подборка
Новый Камаз электромобиль под автопилотом Яндекс связанный с проект Шатл 2020 — автобус беспилотник
К-700, К-701 «Кировец» в воде и грязи! Глаза боятся а «Кирюша» (К-700) едет! Подборка
Крутой разворот
К-700, К-744 «Кировцы» на бездорожье! Кировец, лучшее средство для передвижения по нашим «дорогам»!
КРАЗы наматывают бездорожье на колеса! Бездорожье рано или поздно заводит КРАЗ в болото!
К-700, К-701 «Кировец» в грязи и снегу! Кировец лучшее средство для передвижения по нашим дорогам!
К-700, К-701, К-744 «Кировцы» в грязи и снегу! «Кировец» на бездорожье, что танк в бою! Подборка
Упражнения на автодроме: эстакада, змейка, гараж, параллельная парковка ГАИ
#1421.#ТЮМЕНЬ#БОЛОТОХОД#TYUMEN#SWAMP[HD](АВТО БЛОГ 2015)
Также смотрите:
kamaz-parts.ru
Изменяем ли параметр
Отчего зависит радиус разворота? Во-первых, от габаритов авто, их поменять, разумеется, не получится. Во-вторых, от того, какой угол поворота у передних колёс. В общем, поменять радиус без серьёзного вмешательства в основную конструкцию не получится. А это потеря гарантии, а также возможные проблемы со стабильной работой. Обычно такие переделки можно встретить на машинах для дрифта, где выворот делают максимальным. Правда, это делается не для уменьшения радиуса разворота, а для увеличения угла заноса, который может держать машина. Обычные гражданские машины лучше не переделывать.
Статья написана по материалам сайтов: moluch.ru, www.drive2.ru, autowestnik.ru.
Разновидности оформления
Возвращаясь к пожарному проезду, можно сказать, что его разновидность — арка, ведущая в полузакрытые и закрытые дворы, должна быть более 3,5 м. Арочные противопожарные проезды должны быть обустроены через каждые 300 м, а их высота не может быть менее 4,25 м.
В случае существования на противопожарных путях установок автоматического тушения, гидрантов и другого оборудования, вышеперечисленные нормы могут быть скорректированы.
Если в конце проезда имеется тупик, то в нем должна быть обустроена площадка 15 x 15 м для совершения разворота крупногабаритного автотранспорта. Максимальная длина тупикового проезда — не более 150 метров.
Противопожарные пути, а также платформы для транспорта оперативных служб реагирования должны быть определены разметкой, бордюрные подъездные пути покрыты отражающей свет красной краской. Также необходима установка противовандальных сигнальных спецсредств и дорожных указателей.
Уклон дороги на проездах должен быть под углом не более 6 градусов. Радиусы поворотов, предназначенных для движения специализированного автотранспорта, должны быть 12 м или больше.
Разворотную платформу требуется обработать антисептиком по всему контуру, а также оснастить водоприемниками для устранения лишней воды в сточные отверстия. В тех проездах и разворотных площадках, где имеются закругления, необходимо устанавливать бортовые камни криволинейного типа.
Толщина надземного покрытия, на всей протяженности противопожарных путей, устанавливается путем расчета обстоятельств эксплуатации и нагрузки, с учетом гидрогеологических показателей, а также материалов конструктивного слоя.
В ряде ситуаций (образовательное учреждение, девятиэтажный жилой дом, больница и т. д.), ко всем строениям должен быть оборудован беспрепятственный пожарный проезд с обеих сторон.
Конечно, это усложняет проектировку строительства, особенно в городских условиях.
БГАК — Учебные материалы — Д.В.Фокин — Современные автомобильные технологии — Теория — Рулевое управление
Рулевое управление с двумя управляемыми осями
Устойчивость и управляемость автомобиля при поворотах во многом зависит от направления следования задней оси по колее передней, которое необходимо для уменьшения угла поворота автомобиля и износа его шин. Применение управляемой задней оси позволяет уменьшать поперечные ускорения при повороте автомобиля, что повышает его устойчивость. Системы управления всеми четырьмя колесами значительно улучшают маневрирование автомобиля. Во-первых, повышается чувствительность автомобиля к повороту рулевого колеса. Ведь при тихой езде по городским улочкам лучше иметь «острое» рулевое управление, чтобы не вращать рулевое колесо на несколько оборотов при каждом маневре. На автостраде же «острое» рулевое управление может вызвать проблемы — автомобиль будет слишком резко реагировать даже на небольшие подруливания. Во-вторых, улучшается маневрирование автомобиля при парковке или развороте в стесненных городских условиях, т.е. уменьшается радиус поворота. И в-третьих, повышается курсовая устойчивость при резких маневрах на высокой скорости.
Рулевое управление всеми колесами может работать в одном из двух режимов: с поворотом колес передней и задней осей в разные стороны или в одну и ту же сторону.
При малых скоростях, примерно до 40 км/ч, задние колёса автоматически поворачиваются в противоположную сторону относительно передних колёс (рис.5.1.44, а). Преимущества рулевого управления всеми колёсами особенно заметны при маневрировании. Диаметр разворота уменьшается примерно на один метр: с 12 до 11 м. За счёт этого улучшаются манёвренные качества автомобиля.
Если
скорость становится выше 40 км/ч, то задние колёса при повороте рулевого колеса
автоматически поворачиваются в ту же сторону, что и передние (рис.5.1.44, б).
За счёт этого улучшается устойчивость, а, следовательно, и безопасность
движения.
Рисунок 5.1.44 – Режимы работы рулевого управления
1. Поворот передних и задних колес в разные стороны (рис.5.1.45)
Рисунок 5.1.45 – Схема движения автомобиля на повороте
Главное преимущество поворота передних и задних колёс в разные стороны заключается в улучшении манёвренности автомобиля при малых скоростях, а также в уменьшении коридора движения автомобиля. Для водителя это выражается в том, что он может поворачивать рулевое колесо на меньший угол при том же радиусе поворота и той же скорости. Автомобиль в движении воспринимается как намного более манёвренный и отзывчивый. Для полного использования преимуществ поворота колёс в разные стороны эта функция активируется только в нижнем диапазоне скоростей (до прим. 40 км/ч).
На рисунке 5.1.45 преимущество управляемой задней подвески показано на примере разворота с минимальным радиусом. Хорошо видно, что радиус разворота R2, достигаемый при использовании управляемой задней подвески, заметно меньше, чем в обычном случае (R1).
2. Поворот колес в одну сторону
2.1. Изменение направления движения автомобиля с управляемыми передними колесами
Водитель инициирует поворот автомобиля — для изменения направления его движения — вращением рулевого колеса, поворачивая тем самым передние колёса автомобиля (рис.5.1.46, а). Вследствие деформации пятна контакта шин (возникающей из-за поворота колёс), передние колёса начинают передавать на кузов боковые усилия.
Чтобы автомобиль мог начать поворачиваться относительно вертикальной оси, на колёсах задней оси должно возникнуть соответствующее противонаправленное боковое усилие реакции.
Вслед за этим боковое усилие изменит своё направление под воздействием стремящейся к наружной стороне поворота массы автомобиля, и только после этого может начать создаваться поперечное ускорение (рис.5.1.46, б).
Рисунок 5.1.46 – Поворот автомобиля с управляемыми передними колесами
Изменение
направления движения автомобиля поворотом только передних колёс приводит к
возникновению довольно большого момента рыскания (вращательного движения
относительно вертикальной оси) до тех пор, пока автомобиль не перейдёт снова в
стационарное состояние движения.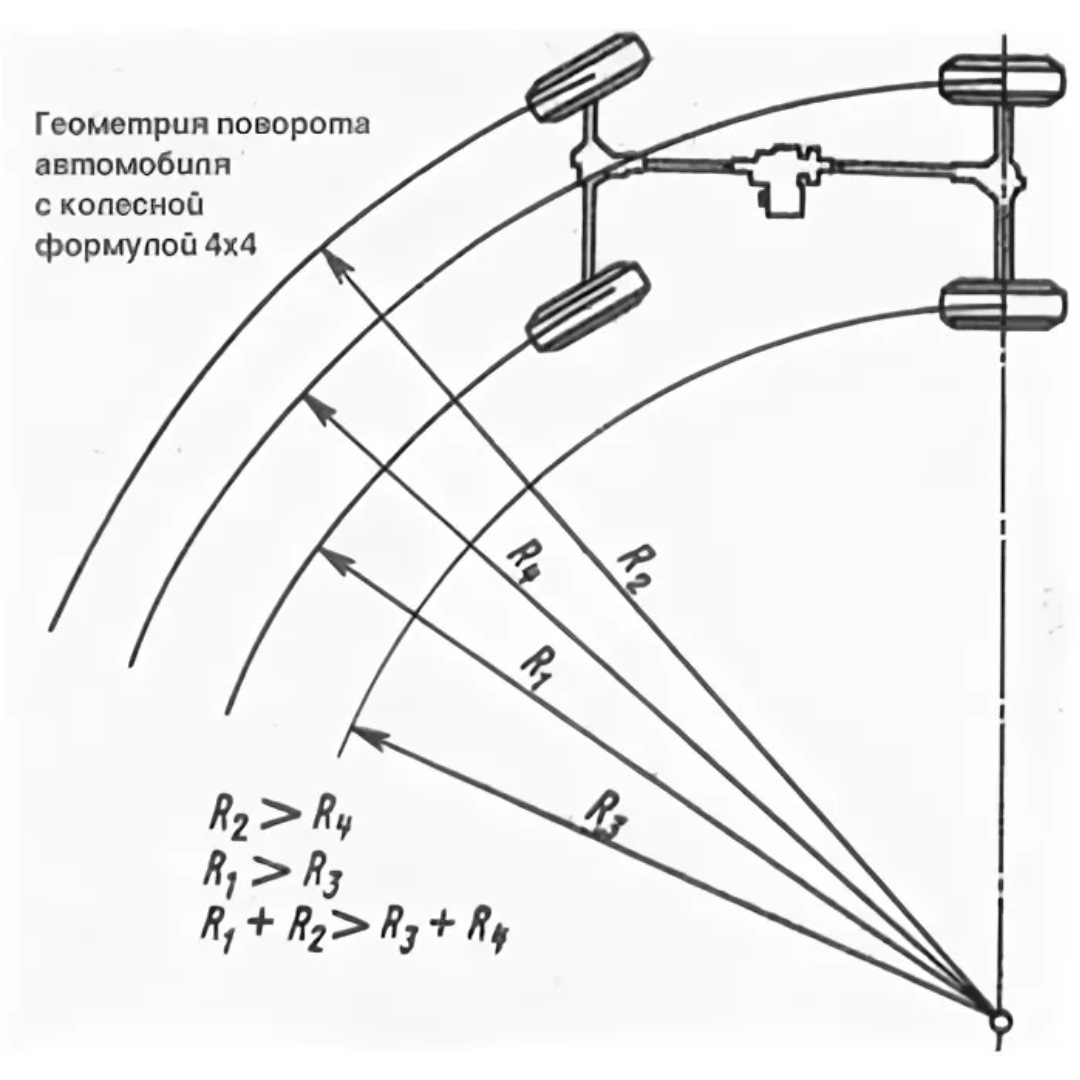 Следствием этого может быть снижение уровня
комфорта вплоть до возникновения нестабильных состояний. Например, резкий
поворот водителем рулевого колеса для объезда неожиданно появившегося
препятствия может привести к возникновению вращательных колебаний относительно
вертикальной оси, которые могут негативно влиять на курсовую устойчивость
автомобиля.
Следствием этого может быть снижение уровня
комфорта вплоть до возникновения нестабильных состояний. Например, резкий
поворот водителем рулевого колеса для объезда неожиданно появившегося
препятствия может привести к возникновению вращательных колебаний относительно
вертикальной оси, которые могут негативно влиять на курсовую устойчивость
автомобиля.
2.2. Изменение направления движения автомобиля с управляемой задней осью
Водитель инициирует поворот автомобиля — для изменения направления его движения — вращением рулевого колеса, поворачивая тем самым передние колёса автомобиля (рис.5.1.47, а). Система реагирует на действия водителя, одновременно поворачивая задние колёса в том же направлении. Вследствие деформации пятна контакта шин всех четырёх колёс, параллельно боковым усилиям со стороны передних колёс на кузов будут передаваться действующие в том же направлении боковые усилия со стороны задних колёс. В результате возникающий момент рыскания, то есть момент поворота относительно вертикальной оси, оказывается существенно меньше, чем на автомобиле с управляемыми передними колёсами. Так как боковые усилия одновременно действуют на колёса обеих осей, период перехода от поворота рулевого колеса к установлению стационарного состояния автомобиля ощутимо сокращается по сравнению с автомобилем, у которого управляются только передние колёса. Изменение направления движения выполняется намного более плавно и комфортно, а также уменьшается вероятность рыскания (возникновения вращательных колебаний относительно вертикальной оси).
Рисунок 5.1.47 – Поворот автомобиля с управляемой задней осью
Стационарное состояние достигнуто, автомобиль движется по заданной водителем окружности (рис.5.1.47,б).
В то
время как поворот задних колёс в противоположном направлении используется при небольших
скоростях движения, поворот задних колёс в том же направлении, что и передних,
выполняется при более высоких скоростях.
Помимо уже названных преимуществ, такая схема ограничивает скорость поворота относительно вертикальной оси, возникающую при маневрировании для объезда внезапно появившегося препятствия. В таких ситуациях задние колёса поворачиваются в том же направлении, что и передние, в большей степени, чем обычно, для повышения курсовой устойчивости автомобиля.
Преимущества рулевого управления всеми колесами при неожиданных маневрах объезда препятствий изображены на рисунке 5.1.48.
Если при скоростях выше 40 км/ч на дороге неожиданно обнаруживаются препятствия и водителю приходится уклоняться, то возникают опасные дорожные ситуации. В автомобилях без рулевого управления всеми колёсами задние колёса не могут следовать за углом поворота передних колёс (рис.5.1.48, а).
Рисунок 5.1.48 (а) – Схема движения автомобиля при резкой смене полосы движения: маневр объезда/ смена полосы движения автомобиля с обычным рулевым управлением
В автомобилях с рулевым управлением всеми колёсами задние колёса поворачиваются однонаправленно с передними колёсами. Манёвр объезда происходит более плавно, опасные дорожные ситуации предотвращаются (рис.5.1.48, б).
Рисунок 5.1.48 (б) – Схема движения автомобиля при резкой смене полосы движения: маневр объезда/ смена полосы движения автомобиля с рулевым управлением всеми колесами
Поворот колёс задней оси (изменение угла их схождения) осуществляется активным исполнительным механизмом. Направляющие тяги крепятся к корпусам колёсных подшипников через резинометаллические сайлент‑блоки, как и на обычной задней подвеске. Но, в отличие от обычной задней подвески, направляющие тяги другими своими концами крепятся (также через резинометаллические сайлент-блоки) с обеих сторон не к подрамнику, а к исполнительному механизму.
Весь
узел, состоящий из исполнительного механизма, привода и электронного блока
управления, установлен на подрамнике и синхронно поворачивает оба колеса на
один и тот же угол.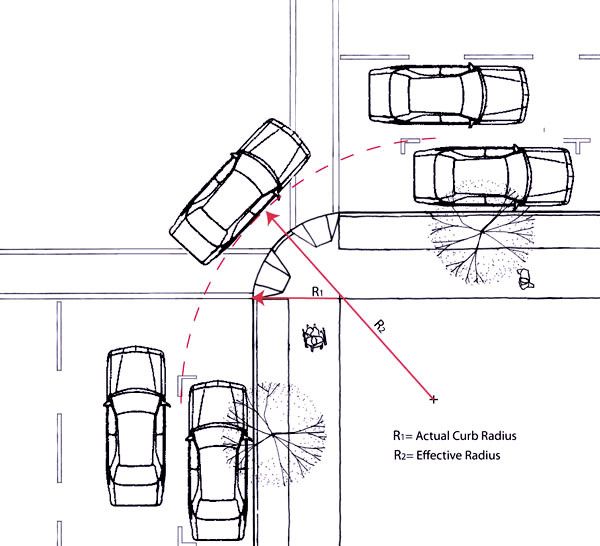 Поскольку угол поворота не превышает прим. 5°, специальные
поворотные кулаки, как в подвеске передних колёс, не требуются. Изменение углов
поворота колёс обеспечивается за счёт эластичности сайлент-блоков в соединениях
рычагов подвески с подрамником.
Поскольку угол поворота не превышает прим. 5°, специальные
поворотные кулаки, как в подвеске передних колёс, не требуются. Изменение углов
поворота колёс обеспечивается за счёт эластичности сайлент-блоков в соединениях
рычагов подвески с подрамником.
Рулевое управление всеми колесами состоит из следующих компонентов (рис.5.1.49):
— блок управления управляемой задней оси J1019;
— электродвигатель;
— привод с винтовой передачей.
Рисунок 5.1.49 – Исполнительный механизм поворота колес задней оси
Электродвигатель приводит во вращение гайку ходового винта через ремённую передачу. Вращение гайки преобразуется в прямолинейное движение ходового винта. Закреплённые на нём направляющие тяги передают это движение на корпуса ступичных подшипников, приводя к одновременному повороту колёс в одну и ту же сторону: вправо или влево (в зависимости от направления вращения электродвигателя). Благодаря шагу и трапециевидному типу резьбы гайки/ходового винта, механизм является самостопорящимся.
Напряжение на электродвигатель подаётся только непосредственно во время поворота колёс, в остальное время электродвигатель не приводится в действие. Удерживающие усилия возникают исключительно за счёт самостопорящихся свойств винтовой передачи.
Максимальный ход винта (из среднего положения) составляет прим. 9 мм, что соответствует максимальному углу поворота колёс прим. 5°.
Датчик
нулевого положения рулевого механизма (рис.5.1.50) регистрирует нулевое,
«среднее» положение ходового винта, то есть такое, при котором поворот колёс отсутствует.
Датчик работает на основе эффекта Холла. Для этого на ходовом винте имеется
штырь с закреплённым на нём постоянным магнитом. Распознавание положения
ходового винта происходит в узком угловом диапазоне в области нулевого
положения. Перед собственно датчиком Холла на плате датчиков расположены также
ещё два выключателя Холла. Эти выключатели служат для определения направления
движения ходового винта.
Рисунок 5.1.50 – Датчик нулевого положения рулевого механизма
Для привода механизма используется трёхфазный бесщёточный синхронный электродвигатель (рис.5.1.51). Трёхфазный ток для него создаётся в преобразователе AC/DC в силовом выходном каскаде блока управления. В электродвигателе имеется датчик положения ротора. Этот датчик регистрирует положение ротора с очень высокой точностью.
Рисунок 5.1.51 – Электродвигатель
Блок управления и выходной каскад представляют собой единый компактный узел, защищённый от брызг и влаги и привинчиваемый к электродвигателю. Блок управления подключён к шине FlexRay как низкоомное оконечное устройство. На основе поступающих в него определённых команд он рассчитывает необходимые значения тока для активации электродвигателя. Преобразователь AC/DC обеспечивает соответствующие значения напряжения, подаваемого на электродвигатель.
Для выполнения своих функций системе управления задней осью всегда требуются следующие измеряемые величины/данные:
• Угловые скорости вращения колёс
Значения угловых скоростей вращения колёс в виде сообщений отправляются блоком управления ABS J104 на шину FlexRay. Блок управления управляемой задней подвески J1019 рассчитывает на их основе эталонную скорость автомобиля, которая в порядке резервирования сравнивается с эталонной скоростью автомобиля, определённой системой ESP.
• Угол поворота рулевого колеса
Этот угол поворота регистрируется датчиком угла поворота рулевого колеса G85 и также передаётся в виде сообщения по шине FlexRay.
На основе двух главных параметров: скорости автомобиля и угла поворота колёс передней оси — блок управления рассчитывает требуемый угол поворота колёс задней оси.
При
кодировке блока управления в нём сохраняются характеристики, задающие угол
поворота задних колёс в зависимости от скорости автомобиля и угла поворота
передних колёс (угла поворота рулевого колеса).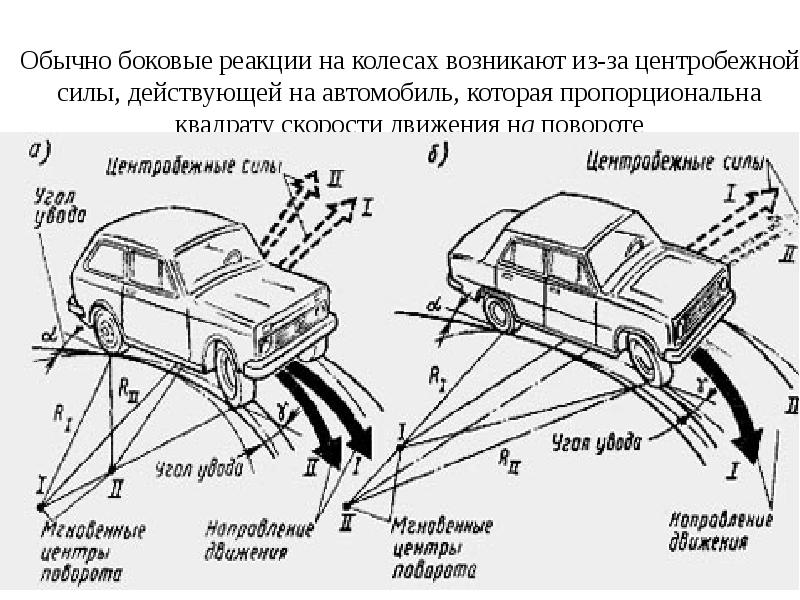 Разные характеристики
соответствуют разному характеру работы рулевого управления/динамическому
поведению автомобиля (желание водителя). Характеристики активируются в зависимости
от выбранной водителем настройки drive select и обеспечивают различные варианты
поведения рулевого управления: от ориентированного на комфорт до спортивного.
Разные характеристики
соответствуют разному характеру работы рулевого управления/динамическому
поведению автомобиля (желание водителя). Характеристики активируются в зависимости
от выбранной водителем настройки drive select и обеспечивают различные варианты
поведения рулевого управления: от ориентированного на комфорт до спортивного.
Если поворот водителем рулевого колеса происходит на невысоких скоростях (до прим. 40 км/ч), задние колёса отклоняются в противоположную передним сторону на угол около 5°.
При этом угол поворота задних колёс тем больше, чем больше угол поворота передних колёс (поворота рулевого колеса водителем), учитывается также скорость движения автомобиля.
При более высоких скоростях (начиная прим. с 50 км/ч) задние колёса поворачиваются в ту же сторону, что и передние, но на заметно меньший угол.
При неподвижном автомобиле задние колёса всегда находятся в нейтральном положении (исходное положение). Точное положение определяется исходя из анализа измеряемых величин датчика нулевого положения и датчика положения ротора.
В исключительных случаях полный возврат задних колёс в нейтральное положение может оказаться невозможным вследствие недостаточности возвратного усилия. Такое может происходить в основном из-за загрузки автомобиля (большой вес, приходящийся на ось), а также из-за свойств дорожного покрытия (высокий коэффициент трения). В этом случае возврат колёс в точное нейтральное положение происходит, только когда автомобиль снова начинает движение. Система соответствующей индикацией предупреждает водителя, что колёса не находятся в нейтральном положении.
Парковочный автопилот и ассистент маневрирования с прицепом могут «запрашивать» определённый угол поворота колёс задней оси. При этом названные блоки управления передают точные значения угла поворота колёс, которые затем обеспечиваются блоком управления управляемой задней оси J1019.
Система
ESP также может оказывать определённое влияние на функционирование
управляемой задней оси.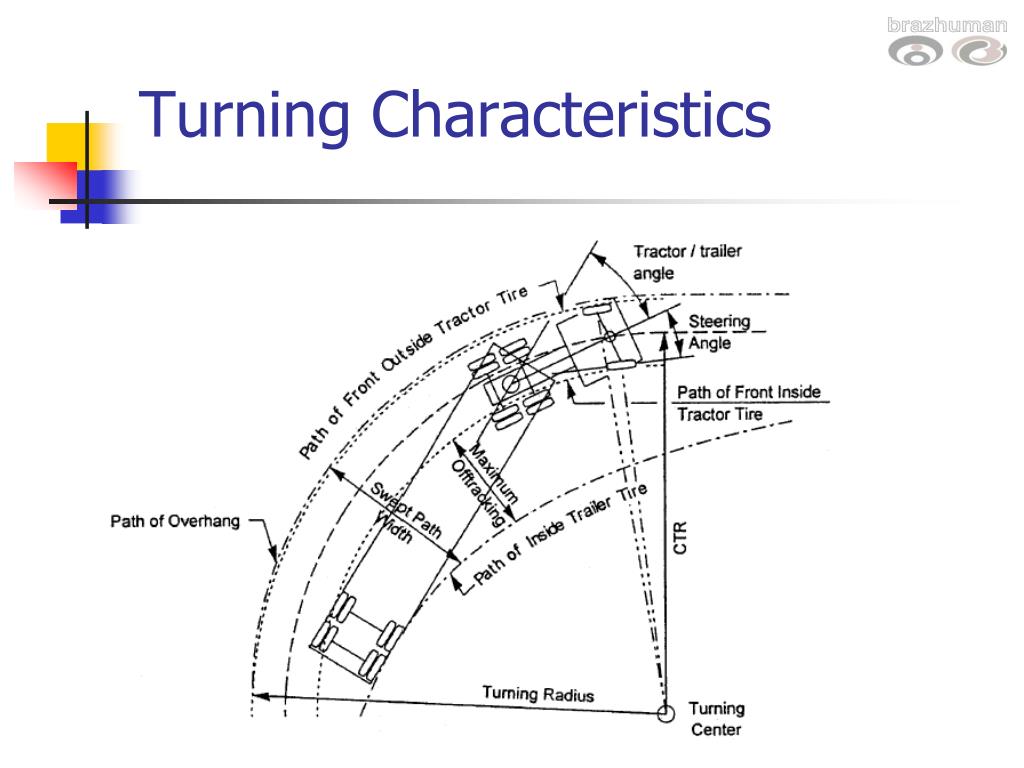 В тех случаях, когда это требуется для поддержания
курсовой устойчивости автомобиля, ESP может блокировать поворот задних колёс.
В тех случаях, когда это требуется для поддержания
курсовой устойчивости автомобиля, ESP может блокировать поворот задних колёс.
Сельское хозяйство | Бесплатный полнотекстовый | Теоретические исследования маневренности при развороте на поворотной полосе агрегата с асимметричным агрегатом и трактором
Применительно к исследованным агрегатам с асимметричным валкообразователем и агрегатом трактора наименьшие радиусы, соответствующие соответственно повороту влево и вправо, были рассчитаны с использованием уравнения (3 ):
Кроме того, следующие значения были рассмотрены для каждого вида поворота [27]:Таким образом, оптимальные радиусы R opt , которые допускают наименьшую длину поворота, оцениваются с помощью уравнения (6):
Кроме того, для для каждого вида поворота (петля-груша-разворот и разворот с прямой полосой) показатель KP был оценен для правого и левого поворотов с использованием уравнения (9) (рисунок 5).Полученные значения показателей КП существенно отличаются друг от друга и подчеркивают неодинаковое поведение асимметричной валкоуборочной жатки и тракторного агрегата на повороте по сравнению с оптимальным K p opt = 11,4. В частности, маневренность на поворотной полосе KP при разворотах с прямой полосой очень похожа на K p opt при поворотах влево (-0,15%), тогда как KP на 180% больше, чем K p opt. для правых поворотов. И наоборот, маневренность КП при повороте на поворотной полосе при поворотах в форме груши никогда не обеспечивает оптимальных условий, потому что КП на 190% больше, чем K p opt для левых поворотов и 716% для правых.Согласно этим результатам, за исключением левых разворотов, исследованная асимметричная валкоуборочная жатка и тракторный агрегат имеют ограниченную маневренность при повороте, точнее, правые развороты и правые и левые грушевидные повороты. фигурные петли в оптимальном режиме практически невозможны (рисунок 5). Этот результат также может быть получен путем оценки оптимального угла γopt с использованием уравнения (10) и оптимального значения K p opt = 11,4. Учитывая данные, относящиеся к исследуемым асимметричным валкоуборочным жаткам и агрегатам трактора, уравнение (10) имеет реальное решение (0.93 рад, т.е. 53 °) только в случае разворота с прямой полосой. Следовательно, грушевидные петли влево и вправо не могут быть выполнены с оптимальной маневренностью K p opt , и эти повороты, безусловно, шире, чем соответствующие самые узкие повороты. Кроме того, полученное значение γopt сравнивалось с максимально допустимыми расчетными значениями угла γmax для правого и левого поворота соответственно, что дало следующие результаты: (i) γmax.r = 31 ° <γopt = 53 °; (ii) γmax.l = 54 ° ≅γopt = 53 °.В первом случае ширина, покрываемая агрегатом, будет больше минимально допустимой. Наоборот, во втором случае маневренность орудийно-тракторного агрегата происходит в оптимальных условиях.УПРАВЛЕНИЕ РАБОТОЙ МАШИНЫ, ВКЛЮЧАЯ РАДИУС ПОВОРОТА МАШИНЫ
Настоящая заявка относится к рабочим транспортным средствам, в частности к компакторам.
Компакторы были разработаны для уплотнения грунта, а также для уплотнения асфальта. Настоящая заявка применима к обоим таким контекстам и применима ко всем уплотнителям.
При укладке дорожного покрытия машина для мощения распределяет горячий дорожный материал по поверхности, такой как дорога или парковка. Один или несколько уплотнителей следуют за машиной для укладки дорожного покрытия для уплотнения материала до желаемой плотности и получения приемлемой отделки поверхности. Чаще всего процесс уплотнения выполняется с помощью двухвальцовых катков и пневматических шинных катков. Двухбарабанные уплотнители, имеющие передний и задний барабан, служат для приведения машины в движение и уплотнения асфальта до подходящего состояния за счет веса уплотнителя и, в некоторых случаях, вибрирующего эксцентрикового веса внутри барабана.Пневматические шинные катки, имеющие передний комплект шин и задний комплект шин, которые служат для приведения машины в движение и уплотнения асфальта до подходящего состояния за счет веса катка. Завершение уплотнения часто может потребовать нескольких проходов по асфальтовому мату с помощью уплотнителя.
Уплотнение строительного материала признано важным для повышения устойчивости материала при строительных операциях, таких как грунт и асфальтовое покрытие. За счет уплотнения поверхности прочность и устойчивость почвы могут быть увеличены до величины, требуемой конструкцией.Государственные дорожные агентства и подрядчики озабочены контролем качества, качества и / или степени уплотнения различных типов местности.
В примере раскрыта система управления перемещением уплотнителя в зоне уплотнения. Система может включать тормозную систему, систему привода и систему рулевого управления, сконфигурированную для управления движением уплотнителя. Система может включать в себя один или несколько датчиков, сконфигурированных для генерации данных, указывающих на рабочие критерии уплотнителя, один или несколько датчиков, включая датчик скорости, сконфигурированный для измерения скорости уплотнителя по поверхности в зоне уплотнения, и контроллер, коммуникативно связанный с один или несколько датчиков.Контроллер может быть сконфигурирован для: приема данных, указывающих скорость уплотнителя от датчика скорости, определения того, превышает ли скорость уплотнителя первую пороговую скорость, и если скорость уплотнителя превышает первую пороговую скорость, управления рулевым управлением. система для ограничения угла поворота до заданного значения, так что радиус поворота уплотнителя увеличивается.
В соответствии с другим примером раскрыт уплотнитель, который может содержать систему рулевого управления, сконфигурированную для управления движением уплотнителя, один или несколько датчиков на компакторе, сконфигурированных для генерации данных, указывающих на рабочие критерии уплотнителя, один или несколько датчиков включая датчик скорости, сконфигурированный для измерения скорости уплотнителя по поверхности в зоне уплотнения, и контроллер, связанный с машиной и коммуникативно связанный с одним или несколькими датчиками.Контроллер может быть сконфигурирован для: приема данных, указывающих скорость уплотнителя от датчика скорости, определения того, превышает ли скорость уплотнителя первую пороговую скорость, и если скорость уплотнителя превышает первую пороговую скорость, управления рулевым управлением. система для ограничения угла поворота до заданного значения, так что радиус поворота уплотнителя увеличивается.
Согласно другому примеру раскрыт способ управления перемещением уплотнителя в зоне уплотнения.Способ может включать в себя управление движением уплотнителя с помощью системы рулевого управления, определение одного или нескольких рабочих критериев уплотнителя, включая скорость уплотнителя по поверхности в зоне уплотнения, определение того, превышает ли скорость уплотнителя пороговую скорость, и управление системой рулевого управления для ограничения угла поворота до заданного значения, если скорость уплотнителя превышает пороговую скорость.
На чертежах, которые не обязательно выполнены в масштабе, одинаковые цифры могут обозначать аналогичные компоненты на разных видах.Одинаковые числа, имеющие разные буквенные суффиксы, могут представлять разные экземпляры аналогичных компонентов. Чертежи в целом иллюстрируют, в качестве примера, но не в качестве ограничения, различные варианты осуществления, обсуждаемые в настоящем документе.
РИС. 1 изображен примерный уплотнитель в соответствии с этим раскрытием.
РИС. 2 — схематическая диаграмма уплотнителя, показанного на фиг. 1, работающий в зоне уплотнения.
РИС. 3A и 3B — виды сверху уплотнителя, показанного на фиг.1 схематично изображает уплотнитель, выполняющий два разных поворота, каждый с разным радиусом поворота. На фиг. 3А изображен первый виток, более жесткий, чем на фиг. 3B, и поэтому имеет относительно меньший радиус поворота, чем радиус поворота на фиг. 3Б. ИНЖИР. 3B схематично изображает уплотнитель, выполняющий второй поворот, который является более постепенным и имеет больший радиус поворота, чем на фиг. 3А.
РИС. 4 — схема системы, которую можно использовать с примерным уплотнителем, показанным на фиг.1 для управления движением машины.
РИС. 5 — блок-схема, изображающая примерный способ работы уплотнителя в соответствии с этим раскрытием.
Для катков слишком резкий поворот (т. Е. С большим углом поворота, что приводит к малому радиусу поворота) при движении с нежелательно высокой скоростью при выполнении уплотнения может привести к повреждению поверхности материала (например, почвы , асфальт и др.) уплотняются. Такое повреждение может быть вызвано боковыми поворачивающими силами, действующими на поверхность барабаном (барабанами).Причиненный ущерб выглядит как чрезмерный разрыв и перемещение материала. Этот ущерб отрицательно сказывается на контроле качества, сроках завершения проекта и других аспектах, связанных с проектом.
Принимая во внимание вышеупомянутые проблемы, настоящая заявка признает, что этот тип повреждения может быть вызван множеством факторов, но в первую очередь может быть результатом работы машины с нежелательной (чрезмерной) рабочей скоростью и с нежелательно большим углом поворота рулевого колеса для та рабочая скорость.Также признаются другие факторы, связанные с таким повреждением, и они могут включать свойства уплотняемого материала (например, тип, плотность, модуль и / или температуру асфальта или грунта), наклон зоны уплотнения, массу уплотнителя, тип машины (например, , ширина барабана, тип барабана (ов) и т. д.) и свойства или условия материала (например, содержание влаги и т. д.) нижележащего слоя материала (например, почвы).
Ссылаясь на фиг. 1 показан уплотнитель 100 согласно одному примеру настоящего раскрытия.Уплотнитель 100 показан как самоходный двухбарабанный уплотнитель, имеющий передний барабан 102 и задний барабан 104 . Однако следует понимать, что различные системы, способы и технологии, раскрытые в данном документе, применимы к любому типу уплотнителя и не ограничиваются типом, показанным на фиг. 1.
Компактор 100 включает в себя рабочее место оператора 106 , которое может быть оборудовано различными системами и механизмами для управления работой уплотнителя 100 .Таким образом, уплотнитель 100 может включать в себя систему привода 108 (обозначенную как включающую рычаг переключения передач), систему рулевого управления 110 (обозначенную как включающую рулевое колесо) и рабочий контроллер 111 . Система привода 108 может дополнительно включать двигатель 112 и генератор 114 , соединенный с двигателем 112 , который может быть прикреплен к раме 115 уплотнителя 100 .Генератор , 114, может служить источником электроэнергии для различных бортовых систем и компонентов, включая операционный контроллер 111 . Двигатель , 112, может содержать любой тип двигателя (внутреннего сгорания, газ, дизельное топливо, газообразное топливо, природный газ, пропан и т.д.), может быть любого размера, с любым количеством цилиндров и в любой конфигурации. Двигатель 112 может быть сконфигурирован так, чтобы приводить в движение уплотнитель 100 , а также может приводить в движение другие компоненты, такие как генератор 114 .Согласно некоторым примерам, двигатель , 112, может содержать электродвигатель.
Конструкция одного примера операционного контроллера 111 будет рассмотрена дополнительно со ссылкой на фиг. 4 ниже. Операционный контроллер , 111, может включать в себя процессор и компонент памяти. Процессор может быть микропроцессором или другим процессором, известным в данной области техники. Операционный контроллер 111, сконфигурирован для связи и управления различными системами и компонентами, как описано в данном документе.
Система рулевого управления , 110, может включать в себя различные механизмы и устройства, которые конкретно не показаны, но известны в данной области техники. Например, система , 110, рулевого управления может включать фрикционное устройство, связанное с операционным контроллером 111 и сконфигурированное для создания сопротивления движению оператора рулевого колеса. Фрикционные устройства хорошо известны в данной области техники и могут создавать сопротивление механически, электрически, за счет использования жидкости с переменной вязкостью и т.п.Точно так же система , 110, рулевого управления может включать в себя клапан управления рулевым управлением, связанный с операционным контроллером 111 . Клапан управления рулевым управлением может быть сконфигурирован для приема обработанного управляющего сигнала от операционного контроллера 111 и, на основе этого ввода, для управления уплотнителем 100 путем управления угловым перемещением барабанов 102 , 104 , как известен в данной области техники.
Система рулевого управления 110 может быть сконфигурирована для приема управляющих сигналов оператора.Как дополнительно обсуждается в данном документе, система , 110, рулевого управления может альтернативно или дополнительно быть сконфигурирована для автоматического управления операционным контроллером 111 в некоторых примерах. Таким образом, система , 110, рулевого управления может коммуникативно соединяться для связи с операционным контроллером 111 . В некоторых примерах система , 110, рулевого управления может быть сконфигурирована для передачи данных рулевого управления оператором операционному контроллеру 111 для обработки.
Аналогичным образом приводная система 108 может быть сконфигурирована для приема действий оператора, например, для увеличения или уменьшения скорости уплотнителя 100 . Как дополнительно обсуждается в данном документе, система привода 108 может альтернативно или дополнительно быть сконфигурирована для автоматического управления операционным контроллером 111 в некоторых примерах. Таким образом, система привода , 108, может быть коммуникативно связана для связи с операционным контроллером , 111, .В некоторых примерах система привода 108 может быть сконфигурирована для передачи ввода оператора операционному контроллеру 111 для обработки.
В других примерах уплотнитель 100 может иметь тормозную систему 116 , сконфигурированную для приема действий оператора для уменьшения или остановки скорости уплотнителя 100 . Тормозная система 116 может альтернативно или дополнительно быть сконфигурирована для автоматического управления операционным контроллером 111 в некоторых примерах.Таким образом, тормозная система , 116, может быть коммуникативно связана для связи с операционным контроллером 111 .
Как обсуждалось выше, следует понимать, что уплотнитель , 100, является только иллюстративным, и большое количество уплотнителей , 100, может быть спроектировано и / или управляться в соответствии с настоящим раскрытием. Например, вместо двухбарабанного уплотнителя уплотнитель 100 может включать только один барабан и некоторый другой тип уплотняющего элемента. Например, передний уплотняющий элемент может быть барабаном, а задний уплотняющий элемент может быть пневматическим. уплотняющий элемент.Также предусмотрены уплотнители с разрезным барабаном. Кроме того, уплотнитель , 100, может содержать устройство для уплотнения, буксируемого за или толкаемое. Рабочее место оператора 106 может также отсутствовать в версиях, где уплотнитель 100 работает автономно и используется система дистанционного управления или самонаведения. Как дополнительно обсуждается в данном документе, системы, способы и технологии могут управлять перемещением уплотнителя , 100, в зоне уплотнения.
Специально для уплотнителя 100 на ФИГ. 1, каждый из переднего барабана , 102, и заднего барабана , 104, включает в себя поверхность барабана 117 для уплотнения асфальта. Поверхность , 117, барабана может состоять из цилиндрической гладкой металлической поверхности, составляющей внешнюю часть корпуса переднего и заднего барабанов 102 и 104 . Когда уплотнитель 100 проходит по асфальтовому мату для его уплотнения, поверхность барабана 117 будет катиться по материалу (т.е.е. асфальтовый коврик), укладываемый брусчаткой (не показан). В результате асфальт мата будет увеличиваться в плотности и иметь относительно гладкую поверхность.
Как теперь конкретно показано со ссылкой на фиг. 2, один или несколько датчиков 118 могут быть установлены на уплотнитель 100 . Операционный контроллер 111 может быть соединен с уплотнителем 100 и коммуникативно связан с одним или несколькими датчиками 118 . В некоторых примерах, по крайней мере, один из одного или нескольких датчиков , 118, может быть удален от уплотнителя 100 , например, камера или другое устройство визуального обнаружения, размещенное рядом с уплотнителем 100 в зоне уплотнения или рядом с ней 124 (схематично показаны пунктирными линиями) Один или несколько датчиков , 118, могут быть сконфигурированы для генерирования данных, указывающих на рабочие критерии уплотнителя 100 , и отправки данных в виде сигналов на рабочий контроллер 111 , который может быть сконфигурирован для получать такие сигналы / данные.Один или несколько датчиков 118 могут включать в себя датчик скорости 120 , сконфигурированный для измерения скорости уплотнителя 100 по поверхности 122 в зоне уплотнения 124 , как дополнительно показано на фиг. 2. Кроме того, в некоторых примерах также можно использовать один или несколько датчиков , 118, . Такие дополнительные датчики могут включать, например, датчик уплотнения 125 , сконфигурированный для измерения плотности и / или модуля строительного материала, образующего поверхность 122 , датчик температуры 126 , сконфигурированный для измерения температуры конструкции. материал, образующий поверхность 122 , датчик наклона 128 , сконфигурированный для измерения уклона поверхности 122 , датчик влажности 130 , сконфигурированный для определения содержания влаги, например, почвы в зоне уплотнения 124 , и / или датчик рулевого управления 132 .Согласно одному примеру датчик температуры , 126, может быть визуальным датчиком, например инфракрасным датчиком (датчиками), сконфигурированным для передачи показаний в реальном времени операционному контроллеру 111 и / или оператору. В некоторых случаях датчик температуры 126 может содержать два инфракрасных датчика, установленных на передней и задней части уплотнителя 100 . Данные от датчиков могут быть предоставлены для картографирования температуры, визуального считывания температуры мата, чтобы поддерживать уплотнитель 100 в надлежащем температурном диапазоне (например,g., избегайте болезненных зон, которые могут возникать в диапазоне температур 104-110 ° C (219-230 ° F)). Датчик уплотнения , 125, может содержать акселерометр или датчик другого типа, который можно использовать как часть системы уплотнения, как по-разному описано в заявке на патент США сер. №№ US2012 / 0107045A1 и US20140348587A1, принадлежащие заявителю, все содержание которых полностью включено.
Датчик поворота 132 может быть установлен на уплотнитель 100 и может быть сконфигурирован для измерения угла поворота, движения, скорости поворота или скорости движения рулевого колеса (не показано) оператором.Датчик , 132, рулевого управления может содержать, например, магнитный геркон (и), датчик (и) Холла, акселерометр (и) и магнитометр, среди других примеров датчиков вращения / ориентации. Датчик , 132, рулевого управления может иметь электронную связь с оперативным контроллером 111 и может быть сконфигурирован для передачи данных на оперативный контроллер 111 , указывающих на измеренные данные (например, угол поворота, перемещение, скорость поворота, скорость движение, другие данные, относящиеся к рулевому управлению и т. д.). Скорость рулевого управления — это скорость, с которой рулевое колесо поворачивается или перемещается оператором для поворота барабанов (только передний барабан 102 показан на фиг. 2) уплотнителя 100 . В варианте осуществления, в котором используется рулевое колесо, скорость поворота может быть скоростью, с которой рулевое колесо вращается оператором. В варианте осуществления с джойстиком, а не рулевым колесом, скорость рулевого управления может быть скоростью, с которой оператор может толкать или тянуть джойстик, чтобы вращать барабаны уплотнителя , 100, во время его движения.
В некоторых примерах уплотнитель , 100, может включать в себя устройство ввода / отображения 134 , которое можно использовать для мониторинга, отображения и / или ввода данных в рабочий контроллер 111 . Например, такие данные могут включать в себя данные, собранные одним или несколькими датчиками , 118, , относительно рабочих критериев (например, плотность и / или модуль упругости строительного материала, образующего поверхность 122 , полученные от датчика уплотнения 125 , температура строительного материала, форма поверхности 122 , полученная с помощью датчика температуры 126 , наклон поверхности 122 , полученная с помощью датчика уклона 128 , влажность почвы, полученная с помощью датчика влажности 130 и др.). Такие данные могут включать в себя дополнительные данные, относящиеся к работе (факторы / критерии), которые могут быть введены в операционный контроллер 111 вручную или автоматически. Эти данные могут включать свойства уплотняемого материала (например, тип асфальта), массу уплотнителя, тип уплотнителя и другие свойства материала или физические условия зоны уплотнения и т. Д.
В некоторых примерах данные, собранные одним или несколькими датчиками , 118, , в частности, в отношении плотности и / или модуля, температуры, наклона, содержания влаги и / или других данных, связанных с работой (факторы / критерии, обсуждаемые выше), могут использоваться операционный контроллер 111 для выбора и / или изменения алгоритма (ов) управления движением, включая радиусы поворота и / или скорость уплотнителя , 100, , как дополнительно обсуждается ниже.Например, на участке уплотнения с очень крутым уклоном более консервативный (больший) радиус поворота может быть выбран и использован операционным контроллером 111 , в отличие от области уплотнения с поверхностью , 122, , имеющей небольшой уклон или вообще не имеющей уклона. Точно так же, если считается, что асфальт относительно более горячий (например, выше 220 по Фаренгейту), более консервативный (больший) радиус поворота может быть выбран и использован операционным контроллером 111 .
РИС. 2 показан рабочий путь 136 уплотнителя 100 в зоне уплотнения 124 на поверхности 122 .Рабочий путь , 136, включает в себя ряд витков , 138, , каждый из которых имеет радиус поворота, как дополнительно обсуждается со ссылкой на фиг. 3A и 3B.
РИС. На фиг.3А и 3В показан уплотнитель , 100, , выполняющий два разных поворота, каждый с разным радиусом поворота. ИНЖИР. 3A показан первый виток 200 , а на фиг. 3В показан второй виток 202 . На фиг. 3A, первый виток 200 изображен более плотно, чем второй виток 202 на фиг.3Б. Таким образом, первый виток 200 имеет относительно меньший радиус поворота R 1 , чем радиус поворота R 2 на фиг. 3Б. Однако первый поворот 200 имеет больший угол поворота θ 1 (т.е. имеет более высокий градус), чем угол поворота θ 2 на фиг. 3B фиг. 3B схематично изображен уплотнитель, выполняющий второй поворот 202 , который является более постепенным и имеет меньший радиус поворота R 2 , чем на фиг. 3А. Второй поворот 202 имеет меньший угол поворота θ 2 по сравнению с углом поворота θ 1 на фиг.3А.
Напомним, что слишком резкий поворот (т. Е. С большим углом поворота, приводящим к малому радиусу поворота) при движении с нежелательно высокой скоростью при выполнении уплотнения может вызвать повреждение поверхности материала (например, почвы, асфальт и др.) уплотняют. Таким образом, в некоторых случаях может быть желательно увеличить радиус поворота (и ограничить угол поворота), как показано на фиг. 3B, в отличие от использования радиуса поворота, показанного на фиг. 3А.
РИС.4 показана схема системы управления 300 , которая может использоваться с ранее обсужденным уплотнителем 100 . Система управления , 300, может включать в себя или содержать операционный контроллер 111 в некоторых примерах. Контроллер 111 может быть, как в примере на фиг. 4, электронный блок управления (ЭБУ) 302 . В примере на фиг. 4, ECU 302 может быть подсоединен к уплотнителю или может быть удален от него. Система управления может включать в себя передатчик, приемник, приемопередатчик и другие компоненты (конкретно не показаны), сконфигурированные для обеспечения возможности ECU 302 для связи и обмена информацией, данными, сигналами, например, с другими системами и / или машинами / транспортными средствами.
Система управления 300 может быть встроенной системой, которая управляет электрическими системами машины и / или другими подсистемами машины. Типы ЭБУ включают в себя электронный модуль / модуль управления двигателем, модуль управления трансмиссией, модуль управления трансмиссией, модуль управления тормозами, модуль управления подвеской и другие примеры. В случае промышленного, строительного и другого тяжелого машиностроения примеры ЭБУ могут также включать в себя модуль управления агрегатом, связанный с одним или несколькими агрегатами, подсоединенными к машине и управляемыми от нее.
Система управления 300 и ЭБУ 302 и другие электронные средства управления уплотнителем 100 могут включать в себя программное обеспечение, аппаратные средства и комбинации аппаратного и программного обеспечения, сконфигурированные для выполнения ряда функций, приписываемых компонентам в раскрытом Примеры. ЭБУ 302 или другое электронное управление уплотнителя 100 может быть аналоговым, цифровым или комбинированным аналоговым и цифровым контроллерами, включая ряд компонентов.В качестве примеров, ЭБУ и другие электронные элементы управления уплотнителя 100 могут включать в себя интегральные печатные платы или ICB, печатные платы PCB, процессор (ы), устройства хранения данных, переключатели, реле и т. Д. Процессоры могут включать в себя один или несколько микропроцессоров, контроллеров, цифровых сигнальных процессоров (DSP), специализированных интегральных схем (ASIC), программируемых вентильных матриц (FPGA) или эквивалентных дискретных или интегральных логических схем.
Система управления 300 может включать в себя память 304 (например,g., носитель данных) для хранения и / или извлечения данных или другой информации, например сигналов от датчиков , 306, . Примеры энергонезависимых запоминающих устройств включают в себя магнитные жесткие диски, оптические диски, гибкие диски, флэш-память или формы электрически программируемой памяти (EPROM) или электрически стираемой и программируемой памяти (EEPROM). Примеры энергозависимых запоминающих устройств включают в себя запоминающие устройства с произвольным доступом (RAM), динамические запоминающие устройства с произвольным доступом (DRAM), статические запоминающие устройства с произвольным доступом (SRAM) и другие формы энергозависимых запоминающих устройств.Устройства хранения данных могут использоваться для хранения программных инструкций для выполнения процессором (ами), например, ECU 302 .
Система управления 300 , включая компоненты, показанные на фиг. 4, могут быть сконфигурированы для связи друг с другом и с другими компонентами уплотнителя , 100, посредством различных технологий и компонентов проводной или беспроводной связи с использованием различных общедоступных и / или частных стандартов и / или протоколов. Примеры транспортных сред и протоколов для электронной связи между компонентами уплотнителя 100 включают Ethernet, протокол управления передачей / Интернет-протокол (TCP / IP), 802.11 или Bluetooth, или другие стандартные или проприетарные транспортные средства и протоколы связи.
Согласно примеру на фиг. 4, система управления , 300, может включать в себя исполнительный механизм поворота шарнирного сочленения , 308, , сконфигурированный для выполнения команд исполнительного механизма , 310, агрегата. Привод агрегата 310 может обмениваться данными со всем ЭБУ 302 , памятью 304 , одним или несколькими датчиками 306 и приводом шарнирного сочленения 308 рулевого управления.Привод , 308, шарнирного сочленения рулевого управления может соединяться с системой рулевого управления, системой привода, тормозной системой, как ранее описано на фиг. 1 для управления движением уплотнителя. Например, привод , 308, шарнирного сочленения рулевого управления может взаимодействовать с клапаном управления рулевым управлением системы рулевого управления, как ранее обсуждалось со ссылкой на фиг. 1. Сигналы от системы управления , 300, через привод шарнирного сочленения , 308, рулевого управления могут управлять системой рулевого управления для выполнения поворотов с желаемым радиусом поворота, как дополнительно описано в данном документе.Таким образом, система управления , 300, , реализованная в виде оборудования, программного обеспечения и их комбинаций, может быть сконфигурирована для автоматического управления движением (например, радиусом поворота, скоростью) и / или другими аспектами работы уплотнителя без вмешательства или взаимодействия с ним. оператор по некоторым примерам.
Система управления 300 может быть настроена, например, для автоматического управления радиусом поворота машины при определенных условиях (например, скорость в определенном диапазоне, скорость в определенном диапазоне с обнаруженной плотностью / модулем асфальта). и / или температура и т. д.) обнаружены. Как обсуждалось ранее, система управления , 300, может быть сконфигурирована для связи и приема сигналов, данных или другой информации от одного или нескольких датчиков 306, , сконфигурированных для обнаружения, измерения и т. Д. Одного или условий, факторов и / или параметры, относящиеся к работе машины. Система управления , 300, может, например, быть сконфигурирована для приема сигналов от и может быть сконфигурирована для автоматического управления движением машины на основе такого одного или нескольких датчиков 306 (например.g., задействуйте тормозную систему, чтобы замедлить или остановить движение машины, приведите в действие систему рулевого управления для выполнения поворота с желаемым углом поворота и т. д.).
В настоящем раскрытии, среди прочего, признается, что автоматическое управление движением машины, например такие же или аналогичные тем, которые обсуждались выше, могут использоваться для дополнения или ограничения операций человека с уплотнителем, например, в аспекте выполнения соответствующих поворотов для уплотнителя (при заданной скорости и / или скорости и других рабочих условиях / факторах), чтобы лучше избежать повреждение асфальта.
Таким образом, согласно одному примеру настоящей заявки раскрыта система, которая управляет перемещением уплотнителя в зоне уплотнения. В широком смысле система может включать в себя систему рулевого управления, тормозную систему, систему привода и / или систему управления (примеры ранее проиллюстрированы и обсуждены). Система может дополнительно включать в себя один или несколько датчиков (примеры ранее проиллюстрированы и обсуждены). Один или несколько датчиков могут быть сконфигурированы для генерации данных, указывающих на рабочие критерии уплотнителя.Один или несколько датчиков могут включать в себя датчик скорости, сконфигурированный для измерения скорости уплотнителя по поверхности в зоне уплотнения. Система управления / контроллер может быть коммуникативно связана с одним или несколькими датчиками. Система / контроллер управления может быть сконфигурирован для приема данных, указывающих скорость уплотнителя, от датчика скорости, определения того, превышает ли скорость уплотнителя первую пороговую скорость, и если скорость уплотнителя превышает первую пороговую скорость, управление система рулевого управления для ограничения угла поворота до заданного значения, так что радиус поворота уплотнителя увеличивается.
Согласно дополнительным примерам, система управления может ограничивать угол поворота системы рулевого управления до предварительно определенного значения, если предварительно определенное значение было превышено оператором. Регулировка заранее определенного значения может осуществляться с заранее определенной степенью, которая зависит от скорости уплотнителя. Контроллер / система управления может быть сконфигурирована так, чтобы определять, превышает ли скорость уплотнителя вторую пороговую скорость, и, если скорость уплотнителя превышает вторую пороговую скорость, управлять системой рулевого управления до второго заданного угла поворота таким образом, чтобы радиус поворота уплотнителя дополнительно увеличивается.Действительно, в некоторых примерах раскрытые здесь системы / способ могут иметь множество пороговых скоростей между первой пороговой скоростью и второй пороговой скоростью. Контроллер / система управления может быть сконфигурирована для определения того, превышает ли скорость уплотнителя любую из множества пороговых скоростей, и, если скорость уплотнителя превышает любую из множества пороговых скоростей, управлять системой рулевого управления на одной из множества заданных углов поворота в зависимости от скорости. В некоторых примерах первый заданный угол поворота и второй заданный угол поворота могут быть линейно связаны друг с другом на основе скорости уплотнителя.
Как обсуждалось ранее, в некоторых примерах один или несколько датчиков дополнительно включают в себя датчик рулевого управления, сконфигурированный для измерения перемещения системы рулевого управления в зоне уплотнения. Контроллер / система управления может быть сконфигурирована для приема данных, указывающих движение системы рулевого управления, от датчика рулевого управления. Как уже говорилось, система контроллера / управления может отменять такое перемещение системы рулевого управления оператором. В некоторых примерах контроллер / система управления может определить, превышает ли скорость уплотнителя максимальную пороговую скорость, и, если скорость уплотнителя превышает максимальную пороговую скорость, может полностью ограничить поворот и / или автоматически активировать тормозную систему или дроссельную заслонку. система привода для снижения скорости уплотнителя до пониженной скорости, которая позволяет вращать уплотнитель.
Согласно некоторым примерам один или несколько датчиков могут дополнительно включать в себя один или несколько датчиков уплотнения, сконфигурированных для измерения плотности и / или модуля строительного материала, который формирует поверхность зоны уплотнения, датчик температуры, сконфигурированный для измерения температура материала, образующего поверхность зоны уплотнения, датчик уклона, сконфигурированный для измерения уклона поверхности, и датчик влажности, сконфигурированный для определения содержания влаги в зоне уплотнения.Контроллер / система управления может быть сконфигурирована для управления рабочими данными на основе системы рулевого управления (получаемыми от датчиков или вводимых из другого источника, не основанного на датчиках). Например, система контроллера / управления может быть сконфигурирована для управления системой рулевого управления на основе одного или нескольких из следующих данных: данные, касающиеся свойств уплотняемого материала, полученные по меньшей мере из датчика уплотнения, датчика температуры, данные, касающиеся наклона области уплотнения, полученные от датчика уклона, данные о массе уплотнителя, данные о типе уплотнителя и данные о свойствах материала или условиях зоны уплотнения, полученные, по меньшей мере, от датчика влажности.
РИС. 5 представляет собой блок-схему, изображающую примерный способ , 400, для управления перемещением уплотнителя в зоне уплотнения в соответствии с этим раскрытием. На фиг. 5, способ , 400, включает в себя начало 402 и этап 404 приема данных, указывающих скорость уплотнителя, от одного или нескольких датчиков. В примере на фиг. 5, но не во всех примерах, способ , 400, может включать в себя этап , 406, приема других данных, касающихся рабочих критериев.Эти другие данные могут вводиться автоматически, вводиться вручную, извлекаться из данных датчиков и т. Д., Как обсуждалось ранее. Этап , 406, может выполняться одновременно с другими этапами способа , 400, , перед этапом , 404, , или может не выполняться вообще в соответствии с некоторыми примерами. Способ , 400, переходит к этапу 408 , где определяется, должен ли применяться другой рабочий фактор / критерий на основе других данных. Это может действовать для изменения алгоритмов рулевого управления / управления, применяемых в способе , 400, , и способ , 400, будет перезапущен с начала 402 с измененным / обновленным алгоритмом / логикой, как указано.Например, на участке уплотнения с очень крутым уклоном можно выбрать и использовать более консервативный (больший) радиус поворота в соответствии со способом , 400, , в отличие от области уплотнения с поверхностью, имеющей небольшой уклон или вообще не имеющей уклона. Точно так же, если считается, что асфальт относительно более горячий (например, выше 220 по Фаренгейту, а не от примерно 150 до 220 градусов по Фаренгейту), можно выбрать и использовать более консервативный (больший) радиус поворота в соответствии с методом. 400 .Следует отметить, что в некоторых примерах этап , 408, может не выполняться или может выполняться, например, после этапов , 410, и , 412, .
Способ 400 на этапе 410 , метод 400 может определить, меньше ли скорость, чем пороговая скорость. Если определено, что скорость уплотнителя меньше пороговой скорости, способ , 400, может быть запущен повторно. Однако, если определено, что скорость превышает пороговую скорость на этапе , 410, , способ , 400, может перейти к этапу , 412, .На этапе , 412, способ , 400, может определить, меньше ли угол поворота уплотнителя на основании ввода оператора, чем пороговое значение угла поворота для скорости уплотнителя. Если способ , 400, определяет, что ввод оператора для угла поворота ниже порогового значения, управление способом , 400, не реализуется в повороте, и способ , 400, запускается заново, как показано на фиг. 4. Однако, если угол поворота уплотнителя, основанный на вводе оператора, превышает пороговое значение угла поворота, способ 400 может перейти к этапу 414 , где способ 400 может реализовать автономное управление радиус поворота для применения заданного радиуса поворота (и заданного угла поворота), соответствующего скорости уплотнителя.
Таким образом, способ , 400, может включать в себя направление движения уплотнителя с помощью системы рулевого управления, как описано. Способ , 400, может включать определение одного или нескольких рабочих критериев уплотнителя, включая скорость уплотнителя по поверхности в пределах зоны уплотнения. Способ , 400, может включать в себя определение того, превышает ли скорость уплотнителя пороговую скорость. Способ , 400, может включать в себя управление системой рулевого управления для ограничения угла поворота до заданного значения, так что радиус поворота уплотнителя увеличивается.
Согласно дополнительным примерам, способ , 400, может дополнительно включать в себя управление системой рулевого управления до предварительно определенного значения, если предварительно определенное значение было превышено оператором. Способ , 400, может дополнительно включать в себя управление системой рулевого управления до предварительно определенного значения, которое может быть в предварительно определенной степени, которая зависит от скорости уплотнителя.
Настоящая заявка раскрывает уплотнители, которые могут включать в себя элементы управления, которые сконфигурированы для отслеживания и, в некоторых случаях, автоматического управления различными аспектами работы машины, включая движение машины.В некоторых случаях такие уплотнители могут включать органы управления, которые в сочетании с управлением оператора и / или независимо от него управляют аспектами движения машины в зоне уплотнения. Такие аспекты движения машины, которыми можно управлять, могут включать, но не ограничиваются ими, рабочую скорость машины в зоне уплотнения и / или радиус поворота машины в зоне прессования. Таким образом, в зоне уплотнения рабочую скорость машины можно регулировать таким образом, чтобы она была ограничена, как дополнительно описано в данном документе.Кроме того, в зоне уплотнения угол поворота машины может контролироваться, в некоторых случаях на основе рабочей скорости машины, чтобы быть ограниченным в результате, что радиус поворота уплотнителя в зоне уплотнения может быть увеличен, как дополнительно описано в данном документе. . Таким образом, вероятность повреждения поверхности уплотняемого материала (например, почвы, асфальта и т. Д.) Может быть уменьшена или предотвращена.
В одном конкретном примере раскрыт вибрационный асфальтовый каток Caterpillar® CB-10, имеющий сплошной барабан и рабочий вес 20945 фунтов, ширину барабана 67 дюймов и диаметр барабана 47 дюймов.Компактор CB-10 способен развивать максимальную скорость 12 км / ч и иметь радиус поворота 4,25 м при угле поворота 36 градусов на максимальной или другой скорости. Однако на горячем асфальте, имеющем температуру от 150 градусов по Фаренгейту до 320 градусов по Фаренгейту, угол поворота может быть ограничен до 20 градусов, когда каток CB-10 движется со скоростью до 6 км / ч, и 10 градусов, когда CB-10 движется. на скорости 12 км / ч. Ограничение угла поворота может быть относительно линейным: от 20 до 10 градусов и от 6 до 12 км / ч.Таким образом, предел угла поворота будет составлять, например, около 15 градусов при скорости 9 км / ч. Важно отметить, что, несмотря на то, что CB-10 в противном случае при вводе оператора мог бы иметь угол поворота 36 градусов, если бы раскрытые системы, методы и методы не применялись, при наличии таких систем, методов и технологий оператор мог бы не допускается применение такого угла поворота на горячем асфальте и в предусмотренных диапазонах скоростей. Скорее, угол поворота будет автоматически ограничен значениями, указанными в приведенном выше примере для CB-10.
Различные примеры проиллюстрированы на фигурах и в предшествующем описании. Один или несколько признаков из одного или нескольких из этих примеров могут быть объединены для образования других примеров.
Приведенное выше подробное описание предназначено для иллюстрации, а не для ограничения. Следовательно, объем раскрытия должен быть определен со ссылками на прилагаемую формулу изобретения вместе с полным объемом эквивалентов, на которые такая формула изобретения имеет право.
Силовые агрегаты и системы для тяжелого оборудования, 1-е издание стр. 815
Copyright Goodheart-Willcox Co., Inc. 815 Глава 24 Системы рулевого управления гусеницами Цели Изучив эту главу, вы сможете: ✓ Описывать типы радиусов поворота с двумя гусеницами. ✓ Объяснять преимущества и недостатки гусеничных тракторов с гидростатическим приводом. ✓ Объясните работу рулевого сцепления и тормозной системы. ✓ Объясните принцип работы дифференциальных систем рулевого управления. ✓ Определите, как термин «гидростатическое рулевое управление» применяется к трем различным системам управления внедорожной техники.✓ Опишите поток мощности через двухскоростную планетарную гусеничную систему рулевого управления. ✓ Опишите поток мощности через двухгусеничный трактор с независимым редуктором. ✓ Опишите преимущества бульдозера Caterpillar® D7E с электроприводом. Как объяснялось в главе 23 «Ходовая часть», многие внедорожные машины оснащены гусеничной ходовой частью. В зависимости от типа машины на машине используются двух- или четырехгусеничные ходовые части для обеспечения мобильности и управляемости.В подавляющем большинстве машин с четырьмя гусеницами используется тот же метод управления (шарнирно-сочлененное рулевое управление), что и на полноприводных сочлененных машинах. В главе 25 «Колесные системы рулевого управления» более подробно рассматриваются шарнирно-сочлененные системы рулевого управления. Для машин, оборудованных двумя гусеницами (двухгусеничные машины), требуются системы рулевого управления, уникальные для внедорожных машин. Радиусы поворота с двумя гусеницами Тракторы, оборудованные двумя гусеницами, требуют от оператора поворота ходовой части гусеницы с разной скоростью и / или в противоположных направлениях для управления трактором.Метод, который оператор использует для управления трактором, определяет, насколько крутой поворот трактор выполняет. Каждый из следующих методов рулевого управления гусеницей создает свой радиус поворота: • Встречное вращение. • Тормозной поворот. • Силовой поворот. • Нейтральное управление. Оператор определяет радиус поворота машины, используя один из способов поворота трактора по кругу. Окружность, образованная самой широкой точкой ходовой части машины, образует окружность поворота.Расстояние по прямой от края окружности до центра окружности и есть радиус поворота трактора. Не все гусеничные тракторы способны выполнять все методы управления.
Наши трехколесные электрические погрузчики имеют много общего, например, высоту подъема […] составляет 3000 мм и t he i r Минимальный радиус поворота i s 9 9 мм.jacforklift.com | Nuestros montacargas elctricos de tres […]ruedas tienen muchas cosas en comn, por ejemplo, su altura de […] высота e 3000m m y su radio de gi ro mnimo es de 99mm .jacforklift.es |
| Например, t h e минимальный радиус поворота o f C PD10 электрический погрузчик составляет 1840 мм, а t h e минимум радиус поворота o f C PD30 электрический погрузчик […] — 2500 мм. jacforklift.com | Por e jempl o, el radio de gir o mnimo d el monta ca rgas elctrico CPD10 es de 1840mm, mien tr as qu ee l radio d e gir o mnimo d el monta ca rgas elctrico […] CPD30 около 2500 мм. jacforklift.es |
| Кроме того, t h e минимальный радиус поворота o f o ur DC, электрический […]
Вилочные погрузчики имеют диапазон от 1840 мм до 2500 мм, что делает их подходящими для […]для использования на складах разных размеров. jacforklift.com | A dem s, el radio de g iro mnimo de nue stros m ontacargas […] elctricos DC vara de 1840mm и 2500mm, hacindolos adecuados para […]usar en depsitos de diferentes tamaos. jacforklift.es |
| T h e минимальный радиус поворота o f o ur бортовой погрузчик […] меньше, чем половина аналогичных погрузчиков с шарнирно-сочлененной рамой. xggm-machine.com | E l radio d e gir o mnimo d e n ues tros ca rgadores […] de direccin deslizante es ms pequeo que la mitad de los cargadores articulados similares. xggm-machine.es |
Потому что их грузоподъемность колеблется от 1 тонны до […] 3,5 тонны и т he i r минимальный радиус поворота i s f от 1880 мм до 2490 мм, […]наши вилочные дизельные погрузчики т. […]можно использовать для подъема и транспортировки материалов во многих ситуациях. jacforklift.com | Debido a su capacityad de carga que vara de 1 a […] 3,5 т на elad as y s u radio d e gi ro mnimo es d e 1 880mm a 2490mm, […]nuestros montacargas дизельное топливо […]pueden ser usados para elevar y transportar materiales en muchas situaciones. вилочный подъемник.es |
Однако эти продукты […] отличаются от каждого другого r i n минимальный радиус поворота , f или например, токарная […]радиус для дизеля CPCD40 […] Длина вилочного погрузчикасоставляет всего 2700 мм, а для дизельного вилочного погрузчика CPCD100 — 3900 мм. jacforklift.com | Sin embargo, estos productos difieren […] entre s en u n radio de g ir or mnimo, po r ej emplo, el radio de gi ro de la [… ]Carretilla Elevadora дизельное топливо […]CPCD40 на слое 2700 мм, для дизельного двигателя CPCD100 на 3900 мм. jacforklift.es |
| Например, t h e минимальный радиус поворота f o r CPC (D) 40 дизель […]
Вилочный погрузчик составляет 2700 мм, а для дизельного вилочного погрузчика CPCD100 — 3900 мм. jacforklift.com | P или eje mplo , el radio de gir или mnimo p ar и el mon ta cargas […] дизельное топливо CPC (D) 40 на 2700 мм, для дизельного топлива CPCD100 на 3900 мм. jacforklift.es |
| Кроме того, t h e минимальный радиус поворота o f t вилочные погрузчики hese […] отличается, например: 1880 мм для CPQY / CPQD10 LPG, бензиновый вилочный погрузчик, […]3370 мм для вилочного погрузчика CPQD70 LPG и вилочного погрузчика CPQD60 LPG. jacforklift.com | A de ms , e l radio d e gir o mnimo d e e sta s car re tillas […] elevadoras es Diferente, por ejemplo: 1880mm para el montacargas de […]LPG, бензин CPQY / CPQD10, 3370 мм для газа LPG CPQD70 и для газа CPQD60. jacforklift.es |
| Кроме того, t h e минимальный радиус поворота o f C PD15 электрический […]
Вилочный погрузчик составляет 1900 мм, а данные электрического вилочного погрузчика CPD25 — 2300 мм. jacforklift.com | A d ems , el radio de giro mnimo de la carre ti lla elevadora […] elctrica CPD15 на высоте 1900 мм, y el de la carretilla elevadora elctrica CPD25 на высоте 2300 мм. jacforklift.es |
| Кроме того, t h e минимальный радиус поворота o f o ur электрический […]
Укладчики также различаются, например: 1300 мм для укладчика CDD10 и 1482 мм для укладчика CDD16. jacforklift.com | A d ems , el radio de gir или mnimo d e nue stros a piladores […] elctricos tambin es diferente, por ejemplo: 1300mm para el apilador […]CDD10, диаметр 1482 мм для установки CDD16. jacforklift.es |
Например, максимальная высота подъема тележки CBD15 составляет 120 мм, […], а для тележки CBD13 — […] 194 или 205мм; t h e Минимальный радиус поворота f o r CBD25 составляет 1812 […]или 1915 мм, а для CBD 13 электрический […] Тележка для поддоновсоставляет 1234, 1334, 1384 или 1434 мм. jacforklift.com | Por ejemplo, la altura de elevacin mxima para la transpaleta CBD15 на 120 мм, […]у транспалета CBD13 […] es de 1 94 o 20 5 мм ; e l радио d e g i ro mnimo de la CBD2 5 es de […]1812 o 1915 мм, y para la transpaleta […]elctrica CBD13 es de 1234, 1334, 1384 или 1434 мм. jacforklift.es |
| W-максимальная высота т a т минимальный радиус поворота ( м м ) dstgmachine.com | W-Alt ur a m xima e n radio d e g iro mnimo (мм ) dstgmachine.es |
| Колесный погрузчик h as a минимальный радиус поворота . cgloader.com | El cargador de ruedas de alta […] емкость id ad t iene u n radio mnimo de giro .cgloader.es |
Благодаря узлу рулевого управления последнего поколения Renault […] Максимальный радиус поворота в a Минимальный радиус поворота o f 4 0,80 м.renault-trucks.co.uk | Gracias a su sistema de direccin de ltima generacin, el […] Renault Max it y ofr ece un radio de gi ro mnimo de 4 , 80 m .renault-trucks.es |
| V — Минимальный радиус поворота ( м м ) dstgmachine.com | V -Radio de giro mnimo (m m ) dstgmachine.es |
Трехколесный […] Электрический вилочный погрузчик Наши трехколесные электрические вилочные погрузчики имеют много общего, например, их высота подъема составляет 3000 мм и t he i r минимальный радиус поворота i s 9 9мм.jacforklift.com | Carretilla elevadora elctrica de tres ruedas A diferencia de las carretillas elevadoras diesel, estos montacargas usan una batera para suministrar потенция. jacforklift.es |
| Минимальный радиус поворота dstgmachine.com | Radio d e giro mnimo dstgmachine.es |
Короткий передний свес 755 мм […] вносит в a минимальный радиус поворота o f 5 ,5 м для […]5-дверная модель и 5,1 м для 3-дверной модели. automania.be | El Corto Voladizo delantero de 755mm […] Contribuy e a un ngulo de g iro mnimo de 5.5 mm p ar a la versin […]5 пуэртас и 5,1 мм для версии 3 пуэрта. automania.be |
Погрузчик с бортовым поворотом Spot […] токарная обработка достигается за счет небольших габаритных размеров. T h e Минимальный радиус поворота o f o Наш бортовой погрузчик меньше, чем половина аналогичного […]погрузчики с шарнирно-сочлененной рамой. xggm-машина.com | Cargador de direccin deslizante […] Generalmente es u n vehculo d e ingeniera con cuatro ruedas motrices, cuyas ruedas laterales izquierdas son independientes de la s ruedas d e impulso […]laterales derechas. xggm-machine.es |
| T h e Минимальный радиус поворота o f o Наш бортовой погрузчик меньше половины от аналогичного […]
Погрузчики с шарнирно-сочлененной рамой … xggm-machine.com | L на карте di reccin deslizante es peque a, capaz de r ea liza r giros « piru et a», y […] puede equiparse con varias herramientas rpidamente … xggm-machine.es |
| T h i s минимальный радиус поворота i s p возможно из-за […] Система рулевого управления Ackerman 90o. itpsl.es | E st e radio d e gir o mnimo e s p osi ble g ra cias […] через sistema de direccin Ackerman de 90. itpsl.es |
| Кроме того, трехколесные автомобили га v e минимальный радиус поворота w h ic h помогает транспортному средству развернуться […] в узком объективе. eco-mobil.ca | A dem s, el radio pa ra d ar vue lta es mnimo, ve nta ja qu e ayuda a dar vuelta mas r pido […] y Maniobrar Mejor el Carulo. eco-mobil.ca |
| Минимум o u tsi d e радиус поворота dstgmachine.com | Radio d e giro exte rno mnimo dstgmachine.es |
Дополнительный […] функция рулевого управления f o r точение t h e станок e a t минимальный радиус ( c oo rdinated)wirtgen.de | Специальная функция […] de di re ccin pa ra girar la m quina con un radio mnimo (p или c oord en adas)wirtgen.de |
| Его excel le n t радиус поворота ( 5 .5 9 м между бордюрами для версии с колесной базой 2700 мм) позволяет припарковать или состыковаться с т h e минимум o f m anoeuvring. renault-trucks.fr | S u exce len te radio de giro (5 , 59m p ara un a distancia e nt re ejes desde 2.700 мм) le permite es ta ciona r c on un mnimo de ma nio бюстгальтеры . renault-trucks.fr |
Например, их грузоподъемность […]диапазон от 1T до […] 3.5T, и t he i r минимальный токарный r a di Использование также отличается друг от друга, например, t h e радиус поворота f o r CPC (D) 20, […]Вилочные дизельные погрузчики CPC (D) 25 […]составляет всего 1160 мм, а для дизельных вилочных погрузчиков CPC (D) 35 — 2490 мм. jacforklift.com | Por ejemplo, su rango de capacity […]de carga son de 1 a […] 3.5 tonela da s, y su radio de gi ro mnimo ta mbi n di fi ere uno del otro, por e je mplo, el radio de giro par a la carretilla […]элевадора дизель […]CPC (D) 20, CPC (D) 25 на глубине 1160 мм, для дизельного двигателя Carretilla Elevadora CPC (D) 35 на 2490 мм. jacforklift.es |
Испытание должно проводиться на полностью загруженном судне, работающем на половинной максимальной скорости, и на […] на малых le s t радиус поворота p o ss ible под этими […]условий. eur-lex.europa.eu | Dicha prueba se realizar a la […]mitad de la velocidad mxima del buque, a carga […] Полная ob re e l me no r radio d e giro p osibl e en tales […]circunstancias. eur-lex.europa.eu |
| W a = Радиус поворота a = Безопасное расстояние 2 […] x 100 мм R cat-lift.com | Wa = Radio d e giro a = Mar gen de seg ur idad […] 2 x 100 мм R cat-lift.com |
(A) длина, размах крыльев, не более […] высота, колесная база, a n d радиус поворотаosce.org | (A) продольный, envergadura, altura […] mxima, ba se de r ued as, y radio de virajeosce.org |
Колеса переднего и заднего мостов перемещаются в поперечном направлении […] перевернутый, таким образом разрешая l l радиус поворота .wirtgen.de | Las ruedas del eje delantero y trasero se mueven en sentido Invertido las unas conpecto a las […] otras, p ermit ien do un radio de viraje p equ eo .wirtgen.de |
Планирование траектории, моделирование и симуляция автономной тяжелой строительной машины с шарнирно-сочлененной рамой, выполняющей цикл погрузки
Abstract
Это исследование представляет планирование и отслеживание траектории для большого колесного погрузчика с шарнирно-сочлененной рамой во время этапа движения цикла загрузки.В исследовании предлагается методология планирования пути, моделирования, моделирования и управления такими транспортными средствами; анализ фокусируется на всех этих компонентах вместе и объясняет взаимосвязь между ними. Разработанная методика планирования пути учитывает динамику и эксплуатационные характеристики сочлененных транспортных средств тяжелой конструкции, а также учитывает ограничения на строительной площадке. Критерий оптимизации траектории основан на минимизации расстояния и острия без пренебрежения ограничениями, налагаемыми размером транспортного средства и его стабильным радиусом поворота.Предлагаемая методология планирования пути является расширением и улучшением алгоритма Ридса и Шеппа для расчета кратчайшего пути. Оптимальный путь состоит из дуг окружности и прямых сегментов, радиус постоянен и идентичен для каждой дуги на желаемом пути, радиус считается подобным минимальному радиусу поворота машины. При оптимизации траектории шарнирно-сочлененной машины; наилучшим образом учитывать размер машины и ее сочленение; обсуждаются и сравниваются более чем один подход.Машина моделируется и моделируется во время отслеживания заранее определенного запланированного пути. Модель машины включает в себя основные рамы, шины и контроллер рулевого управления. Разработанный ПИД-регулятор используется для сохранения бокового положения машины в пределах заданного пути при движении с постоянной скоростью. Результаты показали приемлемый оптимизированный путь, который машина может точно отслеживать.
Ключевые слова
Автомобиль с сочлененной рамой
Колесный погрузчик
Автономный автомобиль
Контроллер
Оптимизация пути
Отслеживание пути
Рекомендуемые статьи Цитирующие статьи (0)
Просмотреть аннотациюCopyright © 2012 Elsevier Inc.Все права защищены.
Рекомендуемые статьи
Ссылки на статьи
Поворотный приводс радиусом поворота 180 градусов
Заменив ранее использовавшиеся цилиндры рулевого управления на приводы Parker со скользящими шлицами, компания Huron Manufacturing смогла решить проблемы, присущие гидроцилиндрам. За счет использования винтовых гидравлических поворотных приводов для управления четырьмя гусеницами на своем асфальтоукладчике с скользящей формой Easi-Pour Compact 880 компания Huron Manufacturing смогла предоставить своим клиентам машину, которая выполняет то, что раньше требовало нескольких машин.
Компактная машина Easi-Pour может использоваться для больших и малых работ, начиная от бордюров с малым радиусом, желобов и тротуаров до подготовки поверхности и обрезки.
«Наши клиенты впечатлены возможностями Easi-Pour — а это практически все. Они могут купить менее дорогой Easi-Pour, но при этом получить ту же универсальность, что и у больших асфальтоукладчиков со скользящими формами … Хотя подрядчик редко пытается преодолеть радиус до двух футов, эта машина действительно может поворачиваться и удерживать уклон даже сильнее, чем это .”
— Мюррей Серфлинг, технический директор Huron Manufacturing
В поисках правильного решения для рулевого управления
Компания Huron Manufacturing заменила ранее используемые гидроцилиндры рулевого управления на поворотные приводы со скользящим стержнем Paker Helac. Гидравлические цилиндры обеспечивали радиус поворота всего 60 ° — 30 ° влево и 30 ° вправо — по сравнению с поворотом на 180 °, обеспечиваемым поворотным приводом. Прежняя конфигурация рулевого управления также требовала нескольких компонентов механической связи, которые необходимо было обработать и сварить вместе, что характерно для этого типа конструкции.Технология поворотных приводов Parker предлагает цилиндрический корпус, внутри которого находятся все движущиеся части. Поворотные приводы не только становятся рулевым механизмом для всех четырех гусениц, но также обеспечивают поддержку нагрузки и гидравлической поворотной мощности.
УHuron Manufacturing также были проблемы с обслуживанием и производительностью машины с гидроцилиндрами рулевого управления от всех шарнирных штифтов, а также со штифтами, удерживающими подшипники, установленные между пластинами ролика. Операторам машин необходимо было следить за тем, чтобы штифты были плотно затянуты, а подшипники регулярно смазывались.Машина не будет работать должным образом, если штифты, удерживающие подшипник, ослабнут. Благодаря решению Parker подшипники, уплотнения и элементы, создающие крутящий момент, полностью герметичны и смазываются гидравлической жидкостью внутри корпуса привода, что снижает потребность в техническом обслуживании и отсутствие утечек. Использование механических приводов — цепей и рычагов — с цилиндрами также ограничивало вертикальное и горизонтальное расположение гусениц. Однако поворотные приводы обеспечивают обратную связь рулевого управления через датчик, установленный на конце каждого привода.
Easi-Pour в действии
Easi-Pour Compact 880 пересыпает препятствия высотой до 42 дюймов, укладывает асфальт шириной до восьми футов и справляется с любыми задачами, которые не соответствуют этим требованиям. После того, как сопровождающий транзитный смеситель засыпает бетонную смесь в бункер конвейера, шнек Easi-Pour перемещает материалы через машину в форму скольжения, расположенную на уровне дороги. Когда асфальтоукладчик движется вперед, гидравлический вибратор помогает формировать бетон в форме, руководствуясь системой измерения линии струны, также производимой Huron.Система струнных линий автоматически обеспечивает идеальное рулевое управление и уклон за счет включения пяти датчиков — двух рулевого управления, двух уклонов и одного контроля поперечного уровня. Машина 880 также оснащена триммером стандартной ширины 51 дюйм для обрезки выступов на поверхности дороги.
Easi-PourHuron хорошо сочетается с отраслевыми альтернативами. Помимо меньшего радиуса поворота, эта низкопрофильная машина обеспечивает оператору отличный обзор всех операций машины.Он оснащен самым большим в отрасли бункером для бетона, но при этом не требует разбивки для транспортировки. Все модели Easi-Pours обладают устойчивостью на четырех опорах, и все опоры способны гидравлически сдвигаться, чтобы приспособиться практически к любой конфигурации укладки. Самое главное, безопасность, долговечность и долгий срок службы заложены в каждом Easi-Pour.
Полностью гидравлический привод
Easi-Pour Compact 880 полностью гидравлически управляется и не имеет механических приводов.Гидравлическая система в виде винтовых, гидравлических поворотных приводов используется для управления четырехгусеничной системой рулевого управления. Приводы рассчитаны на давление 3000 фунтов на квадратный дюйм. Четыре гусеницы приводятся в движение гидравлически через двухскоростные поршневые двигатели — низкая скорость во время операций формования и высокая скорость при перемещении по рабочей площадке.
Гусеничные приводы рассчитаны на давление 4500 фунтов на кв. Дюйм с общим расходом 49 галлонов в минуту (галлонов в минуту). Гидравлический привод триммера использует поршневой насос замкнутого цикла, работающий под давлением 4500 фунтов на квадратный дюйм, с расходом до 36 галлонов в минуту.Конвейер машины и шнек бункера приводятся в действие шестеренчатым насосом с ручным ручным клапаном для регулирования скорости. Рабочее давление конвейера и бункера составляет 2500 фунтов на квадратный дюйм, что требует расхода до 25 галлонов в минуту от шестеренчатого насоса. Максимальное давление подъема и рулевого управления машины составляет 2200 фунтов на квадратный дюйм, которое обеспечивается насосом открытого цикла с компенсацией давления. Электромагнитные клапаны на 12 В используются для управления всеми функциями, выполняемыми насосом с компенсацией давления.
Дополнительные преимущества
Преимущества приводной технологии выходят далеко за рамки отказа от цилиндрового рулевого управления.
«В прошлом мы использовали приводы Helac для двух других машин, в том числе для наших фрезерных и горных машин для управления четырьмя колесами и позиционирования конвейера. Продукция остается прочной и надежной, и ее невероятно легко встроить в любую из наших машин »,
— Мюррей Серфлинг, технический директор Huron Manufacturing
ПриводыHelac улучшили общий внешний вид машины Easi-Pour 880 с их чистым корпусом, компактным и не мешающим другим функциям.Повышенная производительность бетоноукладчика со скользящими формами была дополнительным преимуществом поворотного привода.
Выходной крутящий момент, создаваемый приводом Parker Helac серии L30, дал машине Easi-Pour возможность выполнять гораздо более крутые повороты, чем у многих аналогичных машин в отрасли. Качество заливки также улучшилось, поскольку высоту гусениц можно регулировать независимо, не влияя на управляемость.
Приводная техника
На разрезе выше показано исходное положение поршня и выходного вала.Жидкость под давлением, поступающая во впускное отверстие A, смещает поршень; неподвижная коронная шестерня заставляет поршень вращаться по часовой стрелке. Справа зубья выходного вала зацепляются с зубьями на внутреннем диаметре поршня, заставляя вал вращаться по часовой стрелке относительно поршня. Канал нагнетания давления B возвращает поршень и вал в исходное положение.
Технологии управления — ключ к преимуществам гидравлических поворотных приводов Parker. Его конструкция обеспечивает уникальное сочетание функций, отсутствующих в других компонентах поворотного позиционирования, — высокий крутящий момент и моментные нагрузки, большие углы поворота и компактные конфигурации.Его скользящая шлицевая технология предназначена для замены нескольких компонентов и работы как вращающееся устройство, монтажный кронштейн и подшипник — все в одном. Конструкция поворотных приводов Parker систематически преобразует линейное движение поршня в мощное вращение вала. Каждый привод состоит из двух движущихся частей — центрального вала и поршня. Спиральные шлицевые зубья на валу входят в зацепление с соответствующими зубьями на внутреннем диаметре поршня. Когда к поршню прикладывается гидравлическое давление, он перемещается в осевом направлении, а шлиц заставляет поршень и выходной вал вращаться одновременно.
Чтобы узнать больше о гидравлических поворотных приводах Parker, посетите наш веб-сайт.
Эту статью предоставили Джессика Ховиси, менеджер по маркетинговым коммуникациям, и Даниэль Моргадо, инженер по приложениям, бизнес-подразделение Helac, подразделение цилиндров
Статьи по теме
Подъемникис поворотными приводами более эффективно сбрасывают отходы
Опрыскиватель отличается от обычного
Уникальная технология поворотной муфты дает строительной фирме конкурентное преимущество
Мы не можем найти эту страницу
(* {{l10n_strings.REQUIRED_FIELD}})
{{l10n_strings.CREATE_NEW_COLLECTION}} *
{{l10n_strings.ADD_COLLECTION_DESCRIPTION}}
{{l10n_strings.COLLECTION_DESCRIPTION}} {{addToCollection.description.length}} / 500 {{l10n_strings.TAGS}} {{$ item}} {{l10n_strings.ТОВАРЫ}} {{l10n_strings.DRAG_TEXT}}{{l10n_strings.DRAG_TEXT_HELP}}
{{l10n_strings.LANGUAGE}} {{$ select.selected.display}}{{article.content_lang.display}}
{{l10n_strings.AUTHOR}}{{l10n_strings.AUTHOR_TOOLTIP_TEXT}}
{{$ select.selected.display}} {{l10n_strings.CREATE_AND_ADD_TO_COLLECTION_MODAL_BUTTON}} {{l10n_strings.CREATE_A_COLLECTION_ERROR}} .