Что такое CAN шина — Монтранс на vc.ru
{«id»:13965,»url»:»\/distributions\/13965\/click?bit=1&hash=875a930c903cc6adc06ab599411bd5cb6319550bf86d639e01006b1ec8131fa1″,»title»:»\u0418\u0422-\u043f\u043b\u0430\u0442\u0444\u043e\u0440\u043c\u0430 \u0434\u043b\u044f \u0430\u0432\u0442\u043e\u043c\u0430\u0442\u0438\u0437\u0430\u0446\u0438\u0438 \u043f\u0440\u043e\u0446\u0435\u0441\u0441\u043e\u0432 \u0432 \u043a\u043e\u0444\u0435\u0439\u043d\u044f\u0445″,»buttonText»:»»,»imageUuid»:»»}
Что такое CAN шина
31 просмотров
CAN (Controller Area Network) — это стандарт протокола связи, используемый для обмена данными между устройствами в автомобильной промышленности и других промышленных приложениях.
CAN-шина представляет собой двухпроводную систему, где данные передаются в форме двоичных кодов (битов). Это позволяет устройствам обмениваться информацией в режиме реального времени. Она также обладает высокой надежностью и устойчивостью к помехам.
CAN-шина используется во многих системах автомобилей, включая систему управления двигателем, ABS (антиблокировочная система тормозов), систему управления подушками безопасности и другие. Она также широко применяется в других отраслях, где требуется передача данных между различными устройствами.
Кан считыватель
Контроль расхода топлива с помощью CAN шины
Подключение к CAN шине позволяет, не вмешиваясь в работу узлов и систем, получить множество параметров для контроля топлива и режимов работы автомобиля.CAN-шина может использоваться для передачи информации о расходе топлива, скорости, пробеге и других параметрах двигателя в систему мониторинга транспорта GPS\ГЛОНАСС. Например, датчик расхода топлива может отправлять данные о расходе топлива на CAN-шины, где они могут быть обработаны и использованы системой управления двигателем для оптимизации работы двигателя и уменьшения расхода топлива.Также существуют специализированные приложения и программы, которые используют данные, полученные через CAN-шины, для анализа расхода топлива и поведения водителя.
Контроль расхода топлива по Can
Преимущества контроля по CAN:
- Подключается к любому транспортному средству с CAN-шиной
- Минимальные затраты на установку и обслуживание
- Сбор полной информации о работе автомобиля
- Не создает помех в работе штатного оборудования
- Подключается без вмешательства в контактную сеть авто
- Удаленная настройка и смена встроенного программного обеспечения
CAN шина / Хабр
Всем привет! Я начинающий разработчик и увлекся Embedded стороной вопроса. Лучший способ запомнить информацию — написать какой нибудь конспект и поделиться им. Ниже моя краткая выжимка о CAN шине и передаче данных через нее:
Ниже моя краткая выжимка о CAN шине и передаче данных через нее:
Шина CAN (Controller Area Network).
Шина представляет из себя пару проводников, в нашем случае витую пару разделенную резисторами сопротивлением 120 Ом (Называется этот резистор Терминаторам). Состоит из линии высокого напряжения (H — high) и низкого напряжения (L-low).
Краткие характеристики:
Скорость 1 mb/s при длине шины до 40 метров (Автомобиль или комната).
Скорость 10 kb/s при длине шины до 1000 метров (здание).
Приемопередатчики равноправны в шине CAN.
Когда никто не передает сигнал по шине и в H и в L по 2,5 вольта. Когда сигнал есть — на H 3,5V а на линии L — 1,5 В. По разнице между H и L приемопередатчики понимают, что началась передача. Поэтому шина CAN не чувствительна к наводкам. Вольтаж на витой паре может быть другой — шина понимает о начале приема или передачи по разнице между L и H.
Когда на вход передатчику приходит ноль — передатчик увеличивает на H напряжение. Все остальные приемопередатчики понимают, что началась передача сигнала. Кодирование выполняется в формате NRZ:
Все остальные приемопередатчики понимают, что началась передача сигнала. Кодирование выполняется в формате NRZ:
Dominant bit — состояние когда на шине H>L — соответствует 1-це.
Recess bit — состояние когда на линии нет сигнала воспринимается как ноль.
Смена бит происходит по частоте передатчика. Частота приемников может незначительно отличаться вследствие чего большая последовательность повторяющихся сигналов может привести к рассинхронизации. Поэтому применяется
bit stuffing.
Bit stuffing — 5. Если идет 5 одинаковых бит — передатчик выставляет противоположный бит. Все приемники игнорируют этот бит. Если же приемники видят подряд 6 одинаковых бит — они понимают что произошла ошибка и игнорируют сообщение.
Collision Resolution (CR) — если два передатчика начинают одновременно передавать — приоритет получает тот кто передает больше единиц. Допустим два передатчика начали одновременно вещать.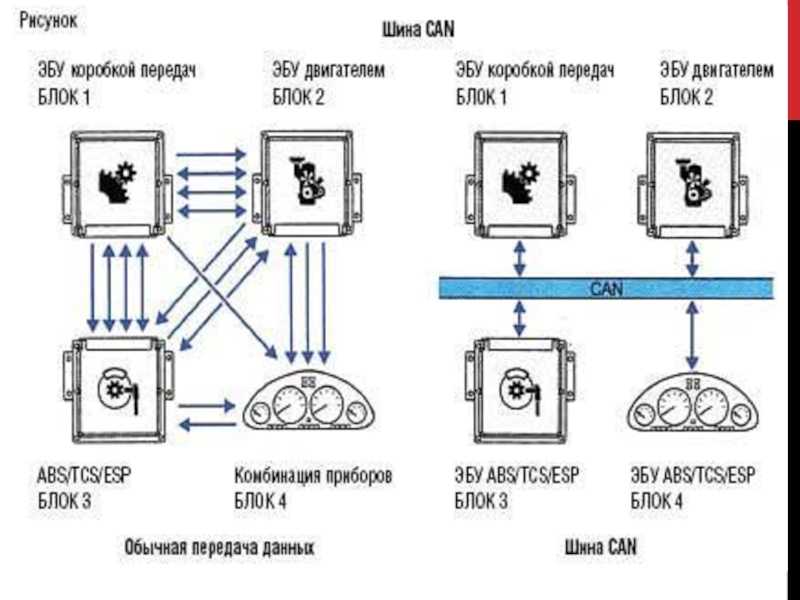 Оба передают 3 единицы, на 4 бите один из них не выставляет сигнал, но фиксирует что на шине есть перепад — таким образом он понимает, что сигнал вместе с ним кто то передает параллельно и замолкает.
Оба передают 3 единицы, на 4 бите один из них не выставляет сигнал, но фиксирует что на шине есть перепад — таким образом он понимает, что сигнал вместе с ним кто то передает параллельно и замолкает.
CR эффективнее Collision Detection в ethernet так как в CD в случае обнаружения двух передающих передатчиков замолкают оба и начинают передачу через какой то случайный промежуток времени.
Протокол передачи информации DATA FRAME. Передача данных когда устройство делится данными.
S — стартовый бит — всегда Dominant bit. Все приемники синхронизируются по нему. На вход приемо передатчику приходит ноль и он подает напряжение на шину H создавая тем самым разницу.
ID — уникальный номер сообщения(команды). По нему приемники понимают нужно ли им это сообщение или оно адресовано кому то другому. В стандартном исполнении CAN 11 бит, в CAN2.0b — 29 бит.
D length — указывает какой длины в байтах будет блок данных.
Data — само сообщение от 0 до 8 байт.
CRC — контрольная сумма размером 2 байта.
ACK. После передачи CRC приемник получающий сообщение выставляет подтверждающий бит если сумма сходиться. Передатчик видит что приемник получил сообщение и далее выставляет 7 бит Reces сигнала — EOF.
Для всех кто увлекается Электроникой и Электротехникой — рекомендую канал Электротехника и электроника для программистов. Если что то не понятно или неправильно изложено — пишите поправлю. Собственно первоисточник статьи — лекция 403 CAN шина- введение.
Как ниже в коментариях справедливо заметили в Википедии конечно больше информации.
Ну и перепечатывать википедию смысла не вижу. Приложу тут ссылочку.
Что такое шина CAN и почему она так важна?
Перейти к содержимому. облако определяет дизайн и развертывание оборудования. Но есть еще один аспект системной связи, столь же важный для будущего этих все более сложных технологий; CAN-шина.
То, как устройства, датчики и системы взаимодействуют локально, так же важно для производителей оборудования, поставщиков и интеграторов, как и способ доставки информации в облако. Несмотря на то, что существует множество протоколов и методов связи, позволяющих одной системе «общаться» напрямую с другой, мы наблюдаем растущий интерес к использованию связи по шине CAN для широкого спектра промышленных приложений.
Но почему CAN, что означает сеть контроллеров, вдруг стал таким привлекательным вариантом для промышленных вычислений? Каковы неотъемлемые преимущества использования этого конкретного метода связи во встроенных системах?
Что такое шина CAN?
Шина CAN — это протокол обмена сообщениями, позволяющий отдельным системам, устройствам и контроллерам в сети обмениваться данными. В общем, шина — это многоузловая коммуникационная система, передающая данные между компонентами. Сеть контроллеров обеспечивает надежную передачу данных с малой задержкой между датчиками и вычислительными блоками в системе. Например, OnLogic работала с клиентами над оснащением сельскохозяйственного оборудования, такого как зерноуборочные комбайны и другие сложные механизмы, оборудованием с поддержкой CAN, что позволяет различным компонентам оборудования эффективно и действенно передавать информацию друг другу.
Например, OnLogic работала с клиентами над оснащением сельскохозяйственного оборудования, такого как зерноуборочные комбайны и другие сложные механизмы, оборудованием с поддержкой CAN, что позволяет различным компонентам оборудования эффективно и действенно передавать информацию друг другу.
После своего появления в середине 1980-х годов связь по шине CAN вышла далеко за пределы автомобильной промышленности, где она впервые получила широкое распространение. До того, как шина CAN стала популярной, жгуты проводов транспортных средств могли содержать мили проводов, причем пучки проводов требовались для передачи различных сигналов к взаимосвязанным системам автомобиля и от них. Напротив, шина CAN использует высокоскоростную (25 кбит/с – 1 Мбит/с) систему проводки с витой парой, что значительно сокращает количество проводов, необходимых для обеспечения связи между компонентами системы.
В то время как CAN по-прежнему широко используется в современных автомобильных компьютерах, таких как серия OnLogic Karbon, шина CAN теперь также внедряется в широкий спектр встроенных и промышленных приложений, от сборочных линий и медицинского оборудования до автоматизации зданий. и установки контроля доступа.
и установки контроля доступа.
На фото выше серия Karbon 800 от OnLogic.
Каковы преимущества шины CAN?
Встроенная связь по шине CAN предлагает ряд преимуществ для пользователей промышленных ПК, в том числе:
- Задержка . Правила арбитража сообщений CAN гарантируют, что сообщение с наивысшим приоритетом будет отправлено первым при одновременной отправке нескольких сообщений на подключенные устройства, датчики и исполнительные устройства и с них.
- Гибкость – Благодаря парной, однокабельной и двухпроводной структуре шина CAN обеспечивает повышенную гибкость при установке и обслуживании. Системы, подключенные к CAN, не только содержат значительно меньше проводов, что упрощает их установку, но добавление новых компонентов в систему требует гораздо меньше усилий, а также значительно снижает сложности при диагностике и устранении проблем с сигналами.
- Надежность – Благодаря проводке по витой паре и дифференциальной передаче сигналов CAN гораздо менее чувствителен к электромагнитным помехам, чем другие протоколы.
 Для связи CAN также требуется меньше кабелей и разъемов, что значительно сокращает точки отказа.
Для связи CAN также требуется меньше кабелей и разъемов, что значительно сокращает точки отказа.
- Стоимость – Меньшие затраты на оборудование и минимальные требования к обработке сигналов делают CAN идеальным решением для встраиваемых приложений, требующих многопроцессорной связи при ограниченном бюджете.
Как шина CAN используется в промышленных вычислениях?
В автоматизированной промышленной установке шина CAN чаще всего используется как часть распределенной системы управления, соединяющая жизненно важные системы, которые могут быть разбросаны по всему объекту. Как правило, человеко-машинный интерфейс (HMI) позволяет оператору взаимодействовать с системой. Оттуда программируемые логические контроллеры (ПЛК) передают эти команды через интерфейс шины CAN датчикам, исполнительным механизмам, двигателям или другим механическим системам, которые выполняют желаемое действие.
CAN часто используется на производственных линиях в производственной среде, позволяя операторам и оборудованию эффективно общаться на каждом этапе процесса сборки.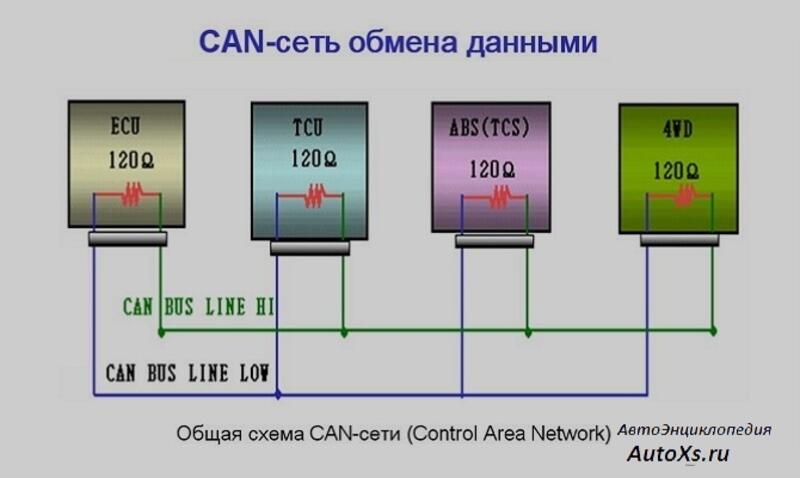 Автоматизация зданий — еще одна область, в которой скорость, низкая стоимость и простота установки сделали связь по шине CAN популярным выбором для подключения систем контроля доступа, безопасности и окружающей среды.
Автоматизация зданий — еще одна область, в которой скорость, низкая стоимость и простота установки сделали связь по шине CAN популярным выбором для подключения систем контроля доступа, безопасности и окружающей среды.
Будущее связи по шине CAN
По мере того, как Интернет вещей продолжает расти и охватывать все более сложные системы, стандартизация способов связи каждого компонента с другими будет иметь жизненно важное значение для обеспечения совместимости, расширяемости и долговечности установки. Здесь, в OnLogic, мы работаем с клиентами над внедрением связи CAN-шины в широкий спектр пользовательских встроенных систем, и мы по-прежнему видим светлое будущее для этой технологии, особенно в производственных условиях и в современных установках автоматизации зданий.
Примечание. Первоначально это сообщение было опубликовано 10 июля 2014 года. Оно было обновлено 10 июля 2022 года. Новости и идеи от нашей команды экспертов находятся на расстоянии одного клика. Нажмите кнопку, чтобы перейти на нашу страницу подписки.
Нажмите кнопку, чтобы перейти на нашу страницу подписки.
Об авторе: Дарек Фэнтон
Дарек — менеджер по коммуникациям в OnLogic. Его страсть как к журналистике, так и к технологиям привела его из отделов новостей местных газет в производственный цех IBM. Благодаря своему опыту сбора новостей он всегда находится в поиске новейших технологий и лучших способов поделиться этой информацией с читателями. В дополнение к своей любви к словам, Дарек — меломан, жонглер и большой любитель ужасных шуток.
Подпишитесь на OnLogic на LinkedIn
Дополнительные статьи
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ
Узнайте, как безвентиляторные компьютеры могут помочь вашему бизнесу 5 способов
Получить технический документ
Просмотреть все статьи
Промышленные компьютеры OnLogic
Откройте для себя множество промышленных компьютеров OnLogic компьютеры, которые помогут вам в развитии вашего проекта Интернета вещей
Магазин OnLogic
Узнайте больше на OnLogic.
 com
comПромышленные ПК OnLogic: рассчитаны на долгий срок службы. Построен на заказ. Доставлено в днях. Посетите наш интернет-магазин на OnLogic.com
Ссылка для загрузки страницы Перейти к началуПротокол шины CAN — 10-минутный урок
Знакомство с шиной CAN:CAN (локальная сеть контроллеров) — это протокол двухпроводной дифференциальной последовательной связи, используемый для контроль. Протокол шины CAN изначально был разработан для автомобильной промышленности — для подключения трансмиссии, подушек безопасности, антиблокировочной системы тормозов/ABS, круиз-контроля, электроусилителя руля, аудиосистем, электрических стеклоподъемников, дверей, регулировки зеркал, аккумулятора и систем подзарядки для гибридные/электрические автомобили и т. д.
CAN — это система широковещательной передачи сообщений с несколькими ведущими (одноранговая сеть), в которой указана максимальная скорость передачи сигналов от 125 кбит/с до 1 Мбит/с.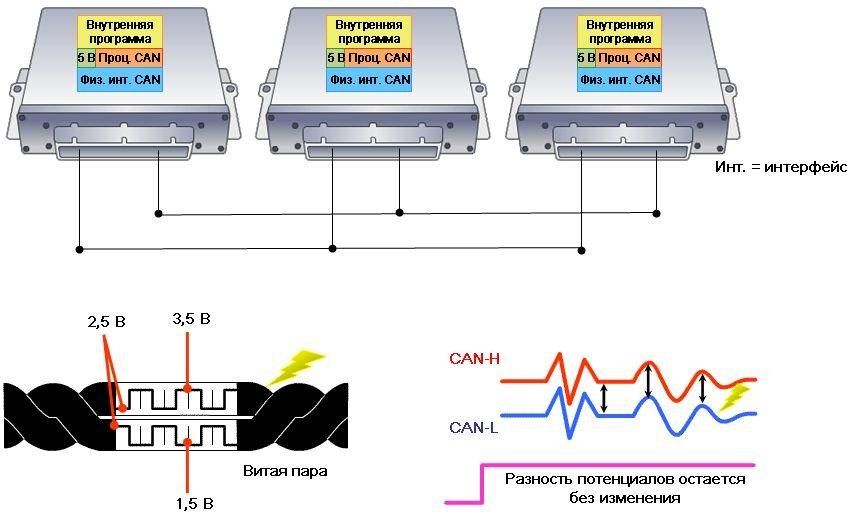
CAN был разработан Robert Bosch GmbH в 1983 году. Шина CAN является одним из пяти протоколов, используемых в бортовой сети. диагностика (OBD)-II стандарт диагностики автомобиля. Ежегодно продается около 1 миллиарда узлов CAN.
Конкурентное преимущество и применениеПреимущества:
- Low Cost : ECU (ECU = Electronic Control Units) взаимодействуют через один интерфейс CAN, то есть не прямые аналоговые сигнальные линии, что снижает количество ошибок, вес и стоимость.
- Централизованный : система шины CAN позволяет осуществлять централизованную диагностику ошибок и настройку по всем ЭБУ.
- Устойчивость : Система устойчива к сбоям подсистем и электромагнитным помехам. вмешательство.
- Эффективный : Сообщения CAN имеют приоритет с помощью идентификаторов, так что идентификаторы с наивысшим приоритетом
непрерывный.

- Гибкий : Каждый ECU содержит чип для приема всех передаваемых сообщений, решите релевантность и действовать соответственно — это позволяет легко модифицировать и включать дополнительные узлы
Рис. 1: Пример CAN
и без CAN в автомобильном применении
Шина CAN широко используется в:
- Транспортные системы (железнодорожные, воздушные, морские и т. д.)
- Системы управления промышленными машинами
- Автоматизация дома и зданий (например, HVAC, лифты)
- Мобильные машины (строительная и сельскохозяйственная техника)
- Приборы медицинские и лабораторная автоматика, а также во многих других встраиваемых и глубоко встраиваемых Приложения.
Рис. 2: Архитектура CAN BUS OSI
Высокоскоростная шина CAN (CAN 2.0B)
- Скорость: до 1 Мбит/с
- Дальность: 40 м
- 29-битный идентификатор сообщения
- Согласование с резистором 120 Ом
Низкая скорость CAN (CAN 2. 0A)
0A)
- Скорость: до 125 кбит/с
- Дальность: 500 м
- 11-битный идентификатор сообщения
- общее сопротивление на конце должно быть около 100 Ом
CAN FD (Гибкая скорость передачи данных)
- Скорость: до 15 Мбит/с
- Диапазон 10 м
Рис. 3: Нерабочая схема подключения DB9 CAN BUS
Является ли CAN синхронным или асинхронным?
При передаче данных CAN используется метод побитового арбитража без потерь для разрешения конфликтов. Этот метод арбитража требует, чтобы все узлы в сети CAN были синхронизированы для одновременной выборки каждого бита в сети CAN. Поэтому некоторые называют CAN синхронным. (К сожалению, термин «синхронный» неточен, поскольку
данные передаются без тактового сигнала в асинхронном формате) Все узлы связаны друг с другом через двухпроводную шину. Провода представляют собой витую пару с волновым сопротивлением 120 Ом (номинальное).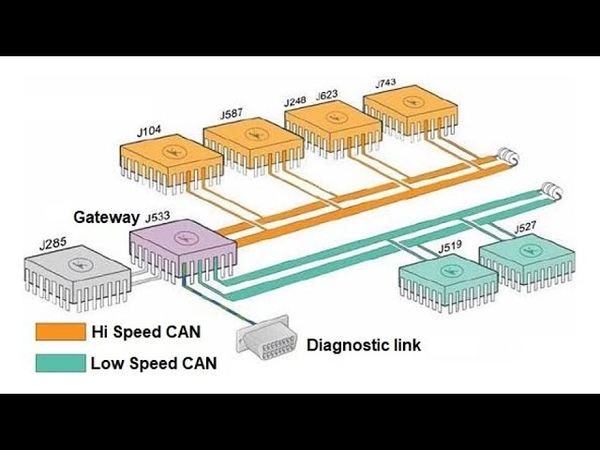
ПРИМЕЧАНИЕ: Шина CAN должна быть терминирована. Нагрузочные резисторы необходимы для подавления
отражения, а также вернуть шину в ее рецессивное или свободное состояние.
Рис. 4: Топология шины CAN
CAN позволяет использовать несколько устройств (называемых «узлами»), в сети CAN требуется два или более узла для общаться. Сложность узла может варьироваться от простого устройства ввода-вывода или встроенного компьютера до шлюз. Для каждого узла требуется: Центральный процессор: микропроцессор или хост-процессор CAN-контроллер: часто является неотъемлемой частью микроконтроллера. Приемопередатчик CAN: определяется стандартом ISO 1189.8-2/3 Блок доступа к среде стандарты [MAU].
Сколько узлов вы можете иметь?
В CANopen доступны уникальные адреса для 127 узлов на шине. Однако практический физический предел узлов составляет около 110 единиц на шину. В J1939 доступно 253 уникальных адреса.![]() для автобуса.
для автобуса.
Рис. 5: УЗЕЛ CAN
В спецификациях CAN используются термины «доминантные» и «рецессивные» биты. Доминанта — это логический 0 (активно преобразуется в напряжение передатчиком). Рецессивная — это логическая 1 (пассивно возвращается в напряжение с помощью преобразователя). резистор) Состояние простоя представлено рецессивным уровнем (Логическая 1). Если один узел передает доминантный бит, а другой узел передает рецессивный бит, то происходит коллизия и доминантный бит «выигрывает». А «сообщение» — это пакет данных, содержащий информацию для обмена между узлами. Каждое сообщение в CAN имеет уникальный идентификационный номер.
В следующем видео подробно объясняется, как работает шина CAN:
При использовании протокола на основе сообщений другие узлы могут быть добавлены без перепрограммирования, так как устройства, подключенные к
шина не имеет идентифицирующей информации, такой как адресация узла.