Регулятор оборотов электродвигателя: назначение, принцип работы, подключение
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик.
 Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы. - Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
 Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.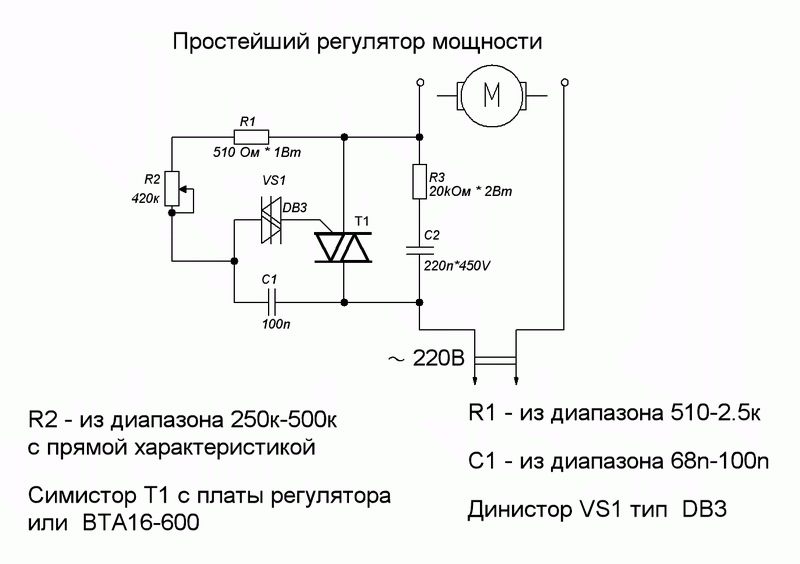
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя.
 Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности. - Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
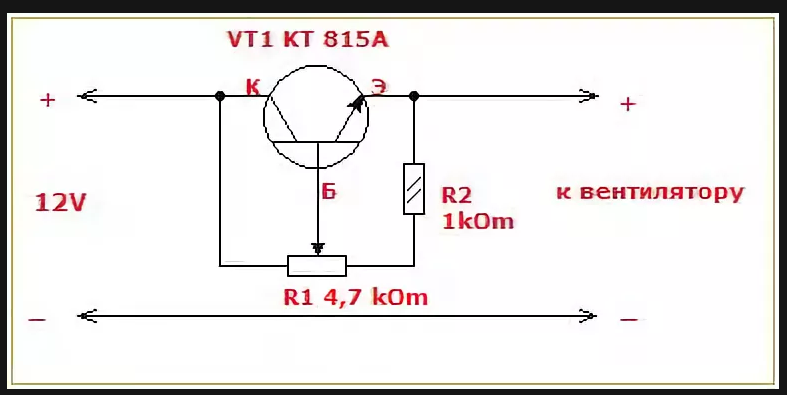
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
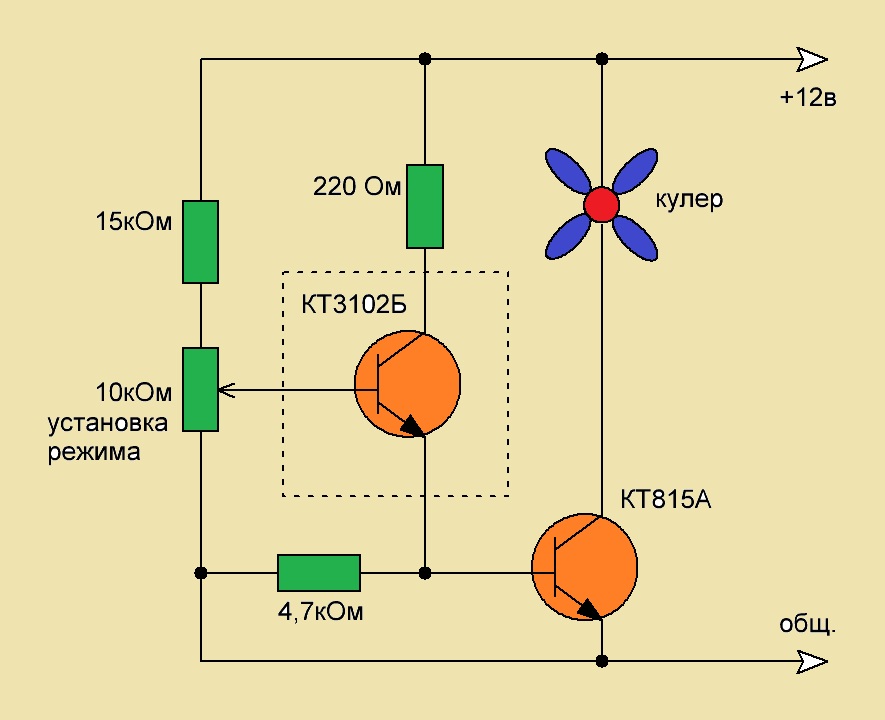
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них.
 Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.

- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
Схема подключения регулятораДалее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
Распиновка регулятораЗатем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
Проверьте цветовую маркировкуЕсли все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
ШИМ регулятор оборотов двигателя 10-60В, 20А
ШИМ регулятор оборотов коллекторного двигателя постоянного тока DC 10-60В 40А с выносным регулятором.
ШИМ регулятор мощности имеет самое широкую область применения. Это регулятор хода коллекторных двигателей, диммер для светодиодов и светодиодных лент, реобас для майнинг фермы.
Регулятор напряжения постоянного тока изменяет значение выходного напряжения в диапазоне от 10 вольт до 60 Вольт с максимальной нагрузкой до 20 Ампер и мощностью до 1200 Ватт.
Профессиональная версия ШИМ-контроллера, адаптированная для непрерывной работы.
Применение:
- плавное регулирование частоты вращения коллекторных электродвигателей (вентиляторы, вакуумные масляные насосы, лопасти, двигатели стеклоочистителей и т. д.)
- реобас для майнинг фермы
- регулировка яркости свечения галогеновых ламп 12В/24В, или ламп накаливания 12В/24В/36В/48В
- регулировка силы света (диммер) (светодиоды и светодиодные ленты без мерцания)
- регулирование мощности нагревателей, резистивных проволочных нагревателей и других резистивных элементов
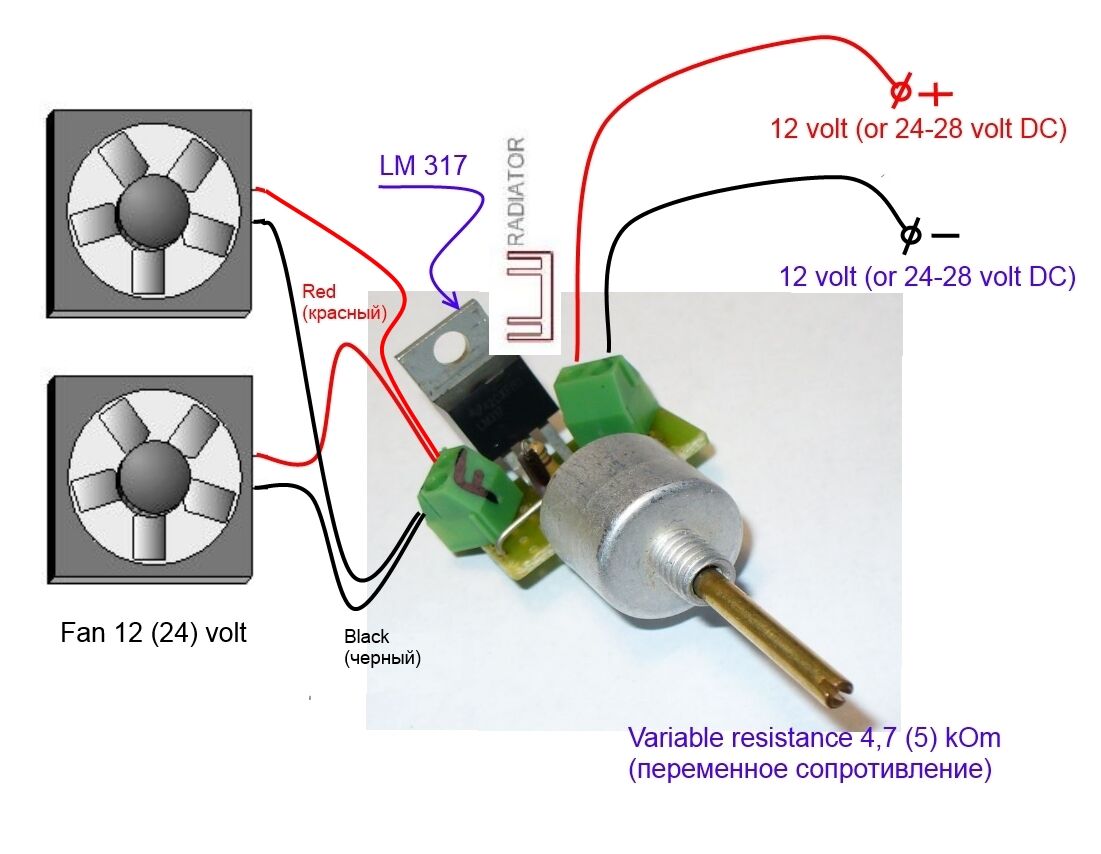
ШИМ регулятор оборотов используется для регулирования оборотов мощных вентиляторов, это реобас для майнинг фермы.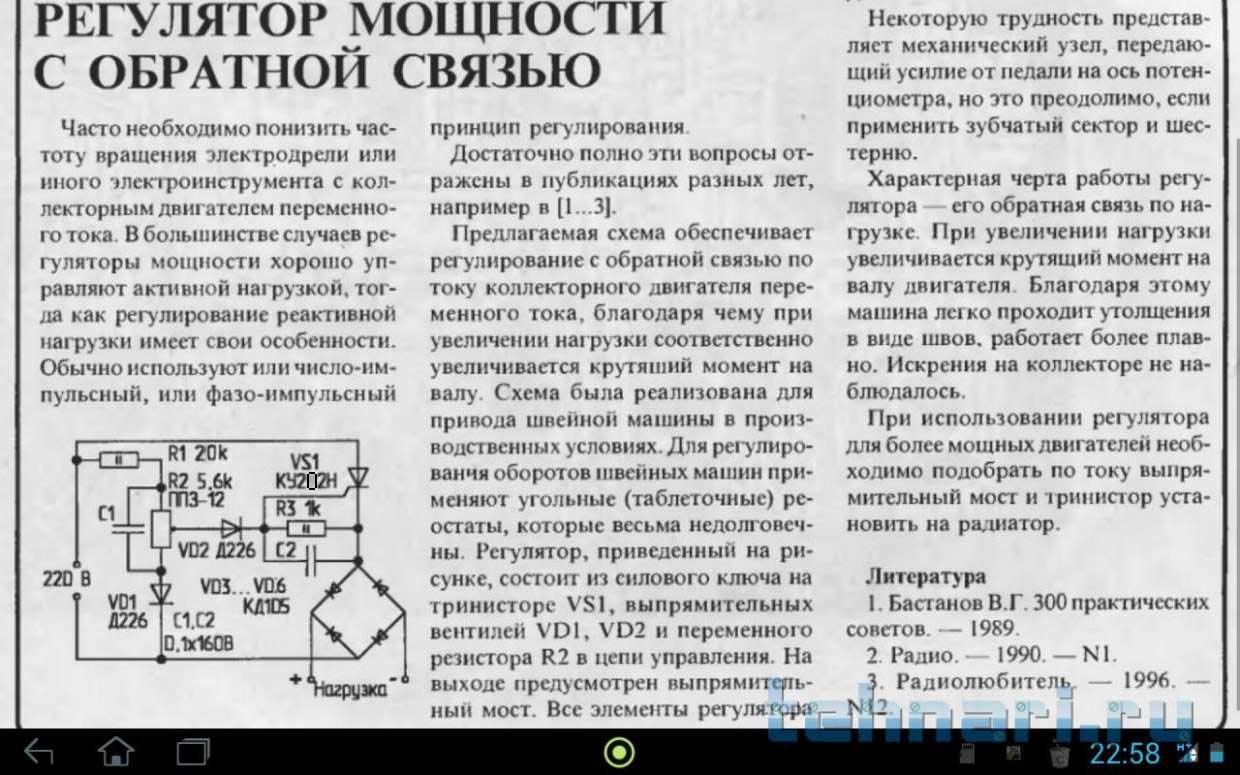 Вентиляторы подключаются параллельно и для соединения вентиляторов используются только черный и красный провода.
Вентиляторы подключаются параллельно и для соединения вентиляторов используются только черный и красный провода.
Управление скоростью двигателя осуществляется с помощью выносного регулировочного резистора на 10 кОм с ручкой.
- Используется для точной регулировки скорости.
- Высокая эффективность, высокий крутящий момент, низкий нагрев.
- С защитой от обратной полярности, с высокой защитой по току.
- Предназначен для управления нагрузкой до 20 А. Рекомендуемая длительная нагрузка 10 A, 450 Вт.
- Внимание! При использование модуля для регулировки на нагрузках близких к 20 А необходимо дополнительное охлаждение.
- Потенциометр управления скважностью импульсов позволяет производить регулировку мощности от нуля до максимального значения
Характеристики
Напряжение питания: 10 – 60 В постоянного тока
Максимальный ток: 20 А
Непрерывный ток: 18 А
Максимальная мощность: 1200 Вт
Диапазон управления скоростью двигателя: от 0 до 100%
Частота ШИМ: 25 кГц
Размеры: 77 х 45 х 28 мм
Схема подключения:
На плате регулятора имеется 4 винтовых клеммы для подключения двигателя и питания.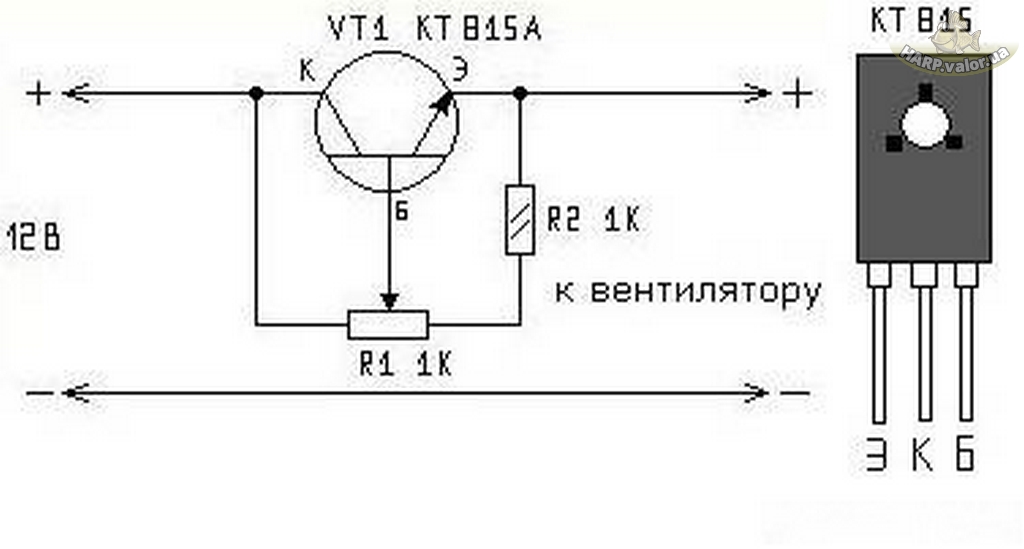 На задней стороне платы есть обозначения клемм.
На задней стороне платы есть обозначения клемм.
Клеммы Power + и Power- подключаем к источнику питания соответственно + и — (например, к аккумулятору)
Методы управления скоростью различных типов двигателей с регулированием скорости
Скачать PDF
Kazuya SHIRAHATA
Компания Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулированием скорости. Наши блоки управления скоростью включают в себя двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы двигателей с регулированием скорости. «Моторный блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсатором, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который сочетает в себе трехфазный асинхронный двигатель с маленький инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении от бытовой техники до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Функции и характеристики, необходимые для этих двигателей, очень разнообразны. Если сосредоточить внимание на сегменте управления скоростью на рынке двигателей, серводвигатели и шаговые двигатели регулируют свою скорость с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и/или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и характеристики следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.-.jpg.b17b6a49410d76c90a124e80879d45dd.jpg)
- Двигатель переменного тока и мотор-редуктор
- Бесщеточный двигатель постоянного тока и мотор-редукторы
- Инверторный блок
2. Методы управления скоростью различных двигателей с регулированием скорости
Способ управления выходом схемы управления скоростью можно условно разделить на две группы: фазовое управление и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис. 1 Классификация двигателей с регулируемой скоростью
2.1. Двигатели переменного тока с регулируемой скоростью
2.1.1. Конструкция двигателя
Как показано на рис. 2, конструкция однофазных и трехфазных асинхронных двигателей включает в себя статор, на который намотана первичная обмотка, и литой из цельного алюминия ротор в форме корзины. Ротор недорогой, потому что конструкция проста и не использует магнит.Рис. 2 Конструкция асинхронного двигателя
Когда скорость этого двигателя должна регулироваться, для определения скорости используется тахогенератор, который крепится к двигателю, как показано на рис.
Рис. 3 Система управления двигателем переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя можно выразить выражением (1). Когда напряжение, подаваемое на двигатель, увеличивается и уменьшается, скольжение с изменяется, а затем изменяется скорость вращения N.
N = 120· f ·(1- s )/ P · · · · · · · · · · (1)
N : Скорость вращения [r/ мин]
F : Частота 〔Hz〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, как показано на рис. 4, существует стабильный и нестабильный диапазоны на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы обеспечить надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
4, существует стабильный и нестабильный диапазоны на кривой Скорость вращения — Крутящий момент. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление без обратной связи) ограничивается управлением скоростью в узком диапазоне, подобном N1~N3 на рис. 5. Чтобы обеспечить надежную работу даже в В вышеупомянутом нестабильном диапазоне необходимо определить скорость вращения двигателя и использовать механизм управления напряжением (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Скорость вращения – характеристики крутящего момента асинхронных двигателей
Рис. 5 Простое управление напряжением . На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так просто реализовать с двигателем переменного тока с регулируемой скоростью. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения/выключения каждого полупериода напряжения переменного тока (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
напряжения, как показано на рис. 7 и рис. 8. Управление скоростью достигается методом фазового управления путем управления среднеквадратичным значением. значение переменного напряжения.
Рис. 6. Изменение напряжения трансформатором
Рис. 8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить постоянную скорость управление фазой с обратной связью даже в нестабильном диапазоне.
На рис. 9 в виде блок-схемы показана конфигурация системы управления скоростью для двигателя переменного тока с регулированием скорости.
Рис. 9 Блок-схема системы управления двигателем переменного тока
Рис. 10 Форма волны для каждого блока
На рис. 10 показаны формы волны для каждого блока. Заданное значение скорости d и обнаруженное напряжение e скорости, генерируемой тахогенератором, сравниваются в блоке усилителя сравнения.
Сигнал напряжения a низкий, когда обнаруженное значение скорости достигает заданного значения скорости, и выше, когда заданное значение скорости снижается. Поскольку триггерный сигнал выводится в точке, где треугольная волна b пересекается с сигналом напряжения a , определяется время (фазовый угол) включения симистора с уровнем сигнала напряжения a . Когда это время медленное, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения снова возвращается, и управление повторяется, так что разница между обнаруженным значением скорости и заданным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид вышеупомянутого регулятора скорости. На рис. 11 рабочая точка двигателя рисует петлю Q-R-S-T-Q с центром в точке O, а скорость вращения поддерживается между N1 и N2.
 Эта петля максимально уменьшена за счет повышения точности определения скорости.
Эта петля максимально уменьшена за счет повышения точности определения скорости.Рис. 11 Работа регулятора скорости
Электродвигатель регулятора скорости переменного тока имеет следующие особенности при использовании фазового регулирования с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть сконфигурирована просто потому, что сглаживающая схема не нужна, что позволяет получить компактную конструкцию по низкой цене.
2) Точно так же возможна конструкция с длительным сроком службы, поскольку не нужен большой алюминиевый электролитический конденсатор.
3) Переключение выполняется только один раз в каждом полупериоде стандартного источника питания переменного тока, что снижает уровень создаваемого шума.
2.1.3. Характеристики
Двигатели переменного тока с регулированием скорости обычно имеют характеристики скорости вращения и крутящего момента, показанные на рис.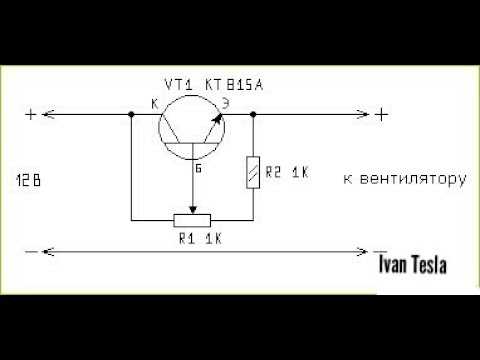 12.
12.
Рис. 12. «Линия безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, то катушка соединена звездой (звездой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов на каждый оборот ротор.
Рис. 14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики скорости вращения бесщеточного двигателя постоянного тока имеют отрицательный наклон, когда его скорость не регулируется, что аналогично характеристике коллекторного двигателя постоянного тока.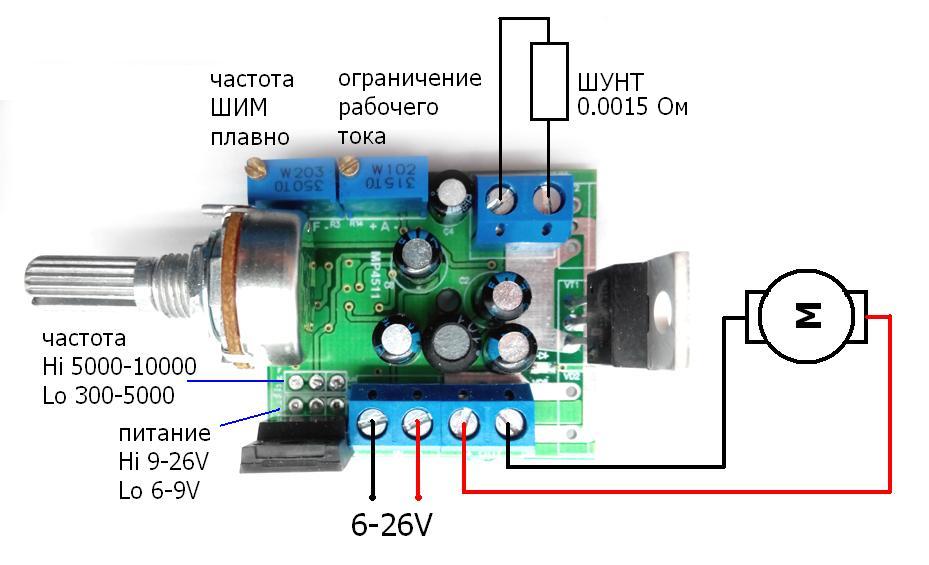
Рис. 15 Характеристики вращательного момента бесщеточного двигателя постоянного тока скорость N1. Когда приложен момент нагрузки T1, рабочая точка смещается к Q, а скорость вращения уменьшается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизм управления скоростью должен будет изменять входное напряжение только всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Это управление напряжением осуществляется инвертором в выходной части схемы управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как показано на рис. 16 (b), с помощью шести переключающих элементов (FET или IGBT), показанных на рис. 16 (a).
Рис. 16 (a) Выходная часть цепи управления (драйвер)
Рис.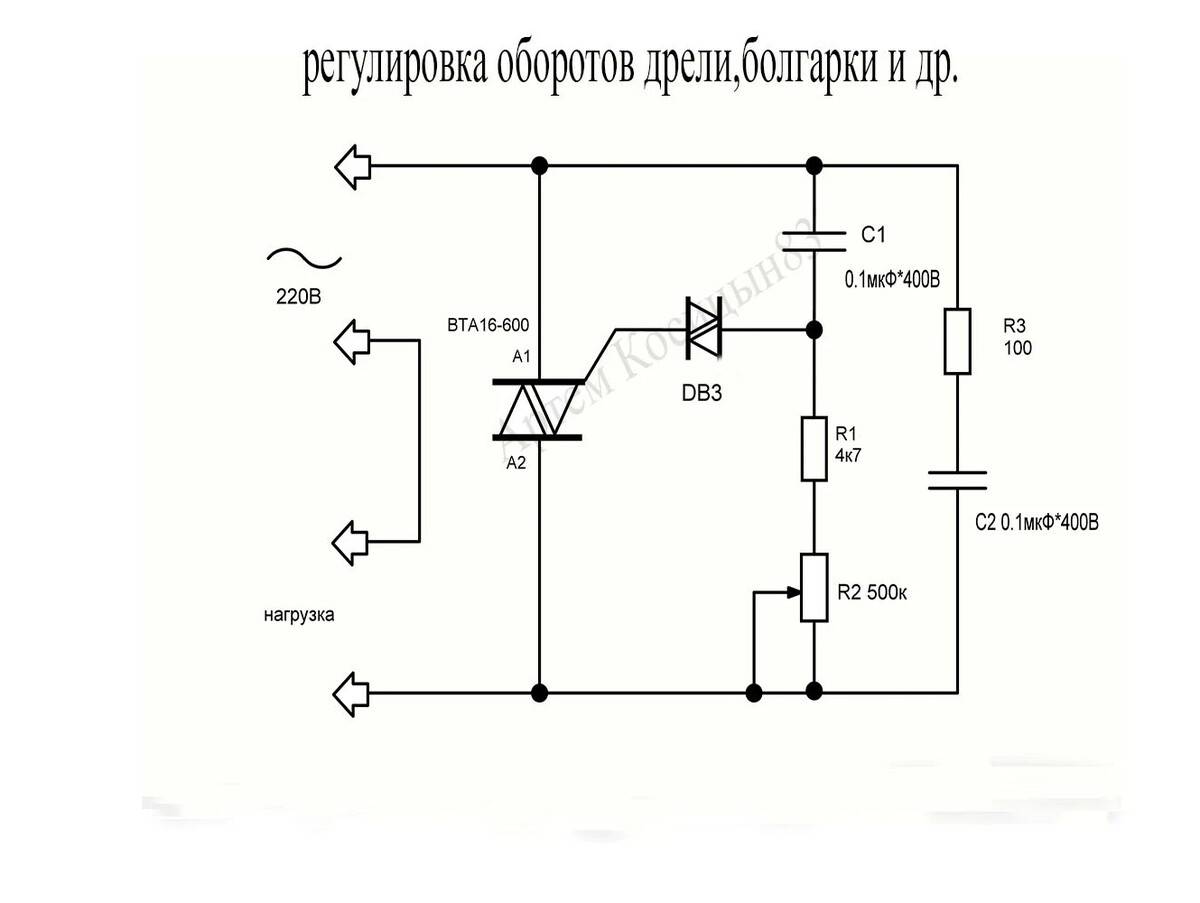 16 (b) Последовательность переключения
16 (b) Последовательность переключения
Элементы переключения подключены к двигателю обмотка, как показано на рис. 16 (а), а состояние ВКЛ/ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется интегральной микросхемой Холла, и соответствующий переключающий элемент включается или выключается, как показано на рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включены, и ток течет из фазы U в фазу W. В это время U-фаза возбуждается как полюс N, а W-фаза становится полюсом S, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1). ~ 12).
На рис. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис.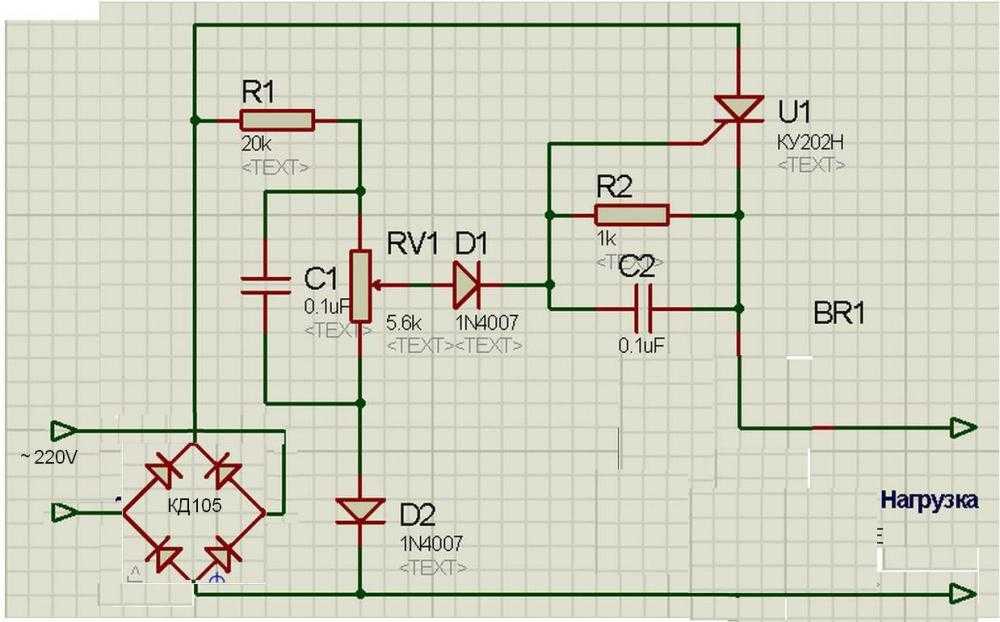 17 Блок-схема системы бесщеточного двигателя постоянного тока
17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от микросхемы Холла в части определения положения блок-схемы, и двигатель вращается.
Затем сигнал от IC Холла отправляется на детектор скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом задания скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения. Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами, а вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость отклика.
3) Двигатель можно уменьшить, поскольку он очень эффективен.
4) Небольшие колебания скорости при изменении нагрузки.
На рис. 16 показана типичная последовательность переключения (метод подачи питания на 120 градусов).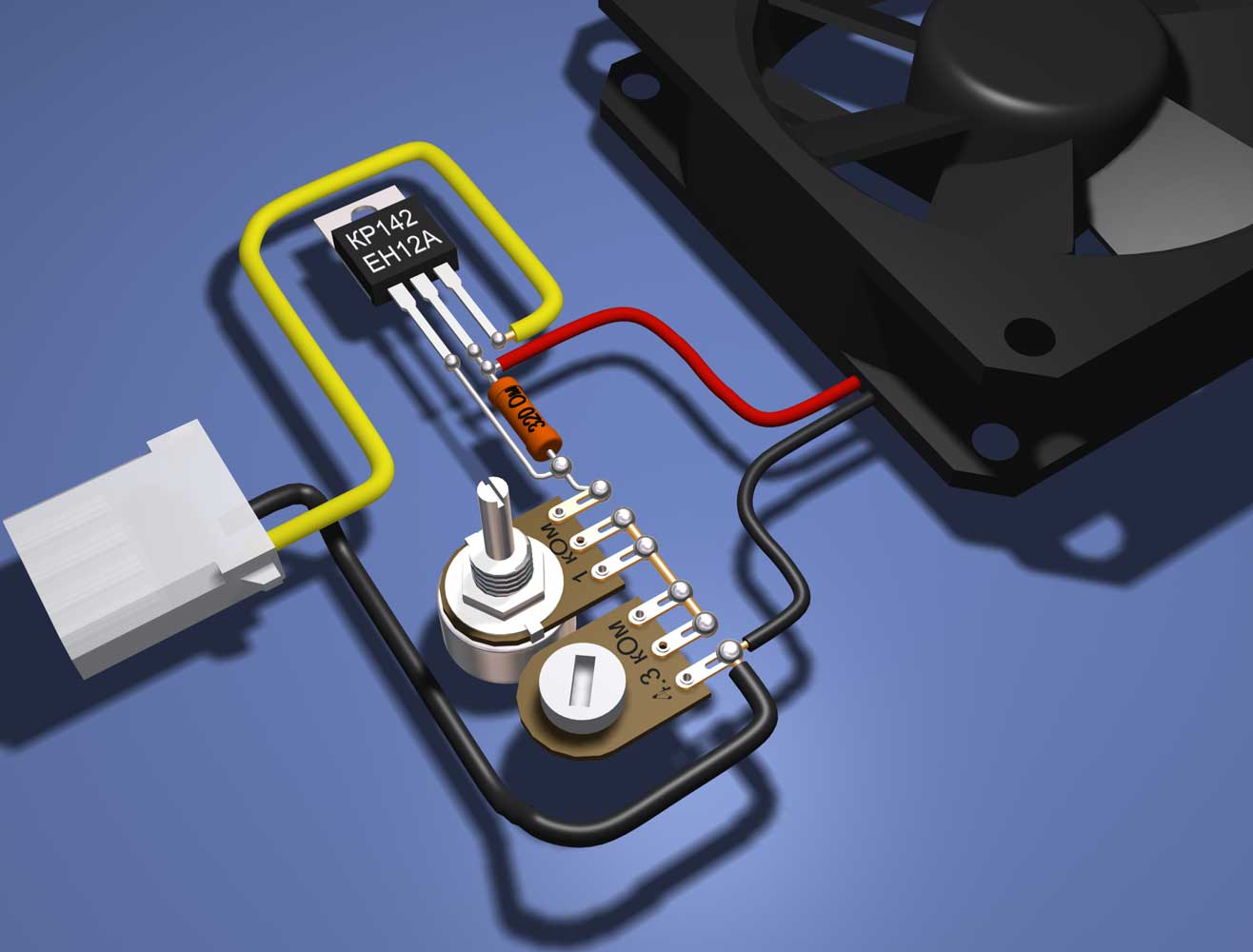 Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Еще более эффективная система бесщеточного двигателя постоянного тока использует метод синусоидального привода, получая информацию о положении ротора с высоким разрешением от программного обеспечения из сигнала Холла IC. Этот метод приводит к малошумному приводу, поскольку ток, который течет к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, прикладываемых методом синусоидального привода и методом 120-градусного привода
2.2.3. Характеристики
Характеристики скорости вращения бесщеточного двигателя постоянного тока имеют ограниченный рабочий диапазон в дополнение к непрерывному рабочему диапазону.
Зона ограниченного режима работы очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме продолжается в течение пяти секунд или более, активируется функция защиты привода от перегрузки, и двигатель замедляется до полной остановки.
2. 3. Блок управления скоростью инвертора
3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок регулирует скорость трехфазного асинхронного двигателя путем изменения частоты f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f путем изменения цикла ВКЛ/ВЫКЛ шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120· f ·(1- s )/ P ·· · · · · · · · · (1)
N : Скорость вращения [об/мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ/ВЫКЛ, как показано на рис. 21. Время ВКЛ/ВЫКЛ регулируется таким образом, чтобы среднее напряжение, двигатель приобретает синусоидальную форму путем сравнения треугольной волны, называемой несущей, с синусоидальной формой сигнала. Этот метод называется ШИМ-управлением.
Этот метод называется ШИМ-управлением.
Рис. 19 Управление работой ВКЛ/ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление без обратной связи, которое просто изменяет скорость, и управление с обратной связью, которое снижает скорость изменение при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация системы управления в виде блок-схемы.
Рис. 20 Блок-схема управления без обратной связи
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частота может быть установлена до 80 Гц) просто тогда, когда регулирование скорости при различных нагрузках не так важно.
Создаваемый крутящий момент T двигателя отображается по формуле (2). Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если V/f, отношение напряжения V к частоте f, будет постоянным.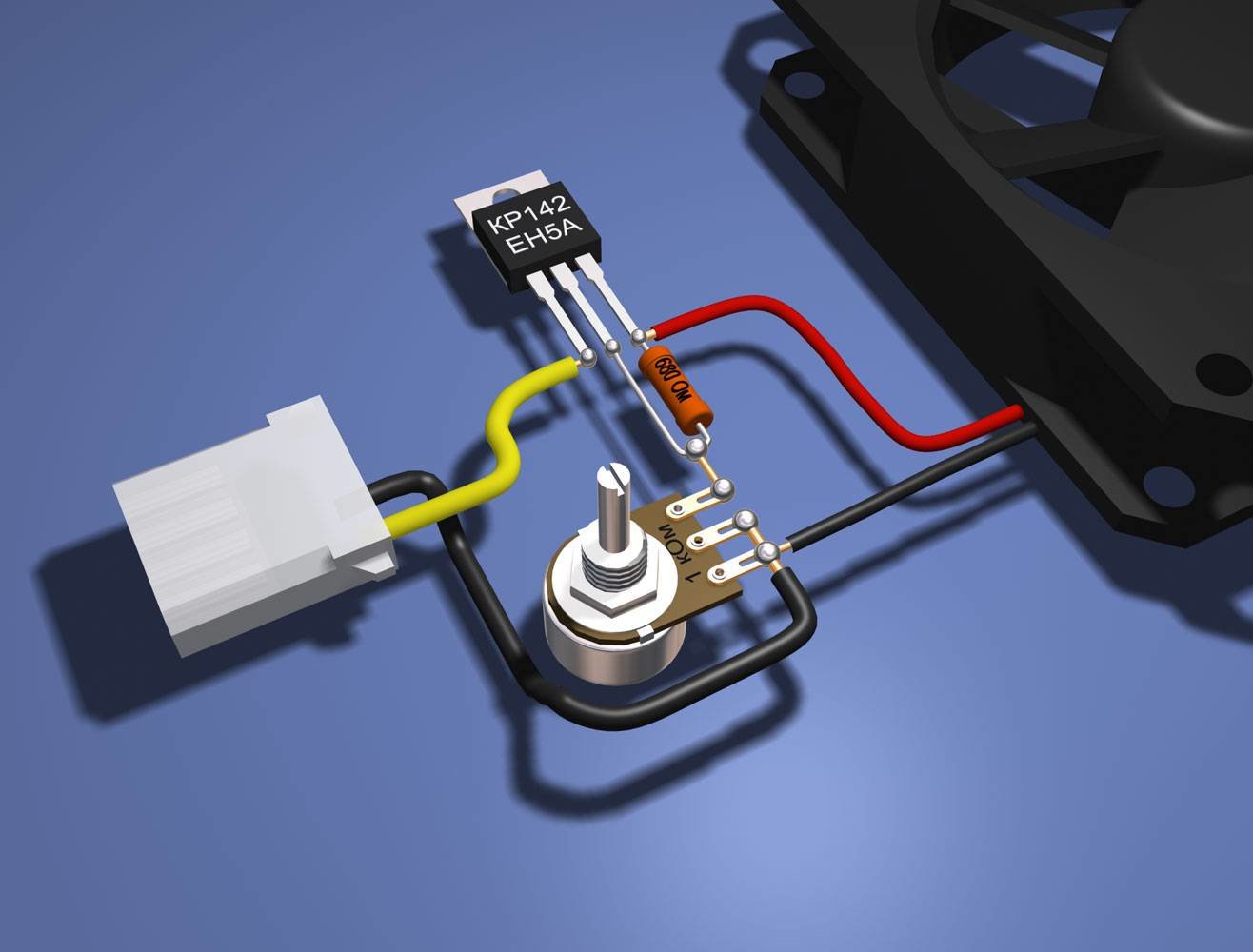
T = K ・ I・V / f ・・・( 2)
T : Крутящий момент [Н·м]
V : Напряжение питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Константа
Однако, чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f. Следовательно, чтобы получить постоянный крутящий момент от низкой скорости до высокой, необходимо отрегулировать отношение V/f на низкой скорости в соответствии с характеристиками двигателя, как показано сплошной линией на рис. 23.
Рис. 21 Управление V/f
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис. 22 Блок-схема управления с обратной связью
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя данные характеристик. таблице (рис. 25), подготовленной заранее, и регулирует частоту преобразователя без необходимости использования датчика скорости на двигателе.
таблице (рис. 25), подготовленной заранее, и регулирует частоту преобразователя без необходимости использования датчика скорости на двигателе.
Рис. 23 Характеристики Таблица
С помощью этой таблицы характеристик и обнаруженного времени разности фаз t инвертор вычисляет выходную частоту инвертора, которая соответствует команде скорости вращения Nset, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления V/f вычисляет напряжение, подаваемое на двигатель, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. В результате при приложении нагрузки выходная частота инвертора повышается, так что можно компенсировать снижение скорости вращения. (3)
2.3.2. Характеристика s
Характеристики скорости вращения и крутящего момента инверторного блока показаны на Рис. 26 и Рис. 27. Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы.
Как поясняется в разделе, посвященном двигателю с регулированием скорости переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет собой предел непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис. 24. Характеристики скорости вращения для управления без обратной связи
Рис. 25 Характеристики скорости вращения для регулирования с обратной связью
двигатели и инверторные блоки ) для использования в широком диапазоне приложений управления скоростью. Подходящий продукт для управления скоростью можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, необходимой для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, которая наилучшим образом отвечает различным потребностям наших клиентов.
Ссылки
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998) 163, стр.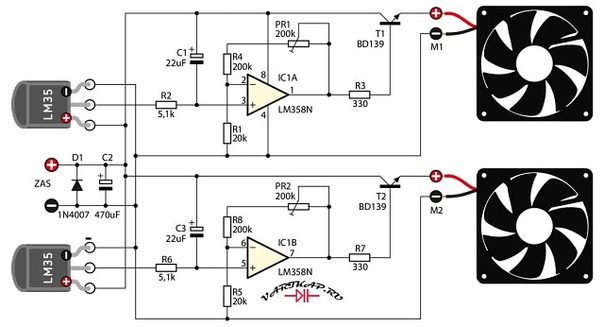 19-25 (2003)
19-25 (2003)
(3) Коджи Намихана, Масаёси Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA № 159, стр. 23-28 (1999)
| Kazuya Shirahata Завод Tsuruoka, ACIX Operations Circuit Technology Division Секция разработки схемы |
Что вам нужно знать о разработке систем контроля скорости транспортных средств
Подпишитесь на наш блог для получения последних обновлений новых статей
Превышение скорости является растущей проблемой как в сельской, так и в городской местности. Количество аварий, связанных с превышением скорости, остается высоким. Вот некоторые сведения о системах контроля ограничения скорости автомобиля и о том, почему все больше и больше людей обращаются к ним.
Водителям необходимо постоянно оценивать свою скорость и вождение, чтобы определить безопасную скорость для текущих дорожных условий, других транспортных средств, пешеходов и тысяч других вещей, которые могут произойти в любой момент. Выбрать лучшую скорость стало сложнее, так как автомобили стали тише и плавнее, а крейсерская скорость увеличилась. Это привлекло внимание к безопасности вождения.
Выбрать лучшую скорость стало сложнее, так как автомобили стали тише и плавнее, а крейсерская скорость увеличилась. Это привлекло внимание к безопасности вождения.
Большинство новых функций безопасности устанавливаются на заводе, но для старых автомобилей требуются решения и устройства послепродажного обслуживания. Существует широкий спектр устройств контроля скорости, таких как ограничители максимальной скорости, автоматические ограничители скорости, бортовые устройства мониторинга и регистраторы аварий. Ограничение максимальной скорости вашего автомобиля обычно осуществляется либо с помощью систем управления двигателем, либо с помощью устройства, которое напрямую управляет дроссельной заслонкой или топливными форсунками. Системы круиз-контроля также можно отнести к разряду систем ограничения скорости транспортных средств. Они удобны для поддержания минимальной скорости, но не контролируют поведение водителя, поскольку просто поддерживают ту скорость, которую водитель устанавливает для них.
Итак, в современных условиях дорожного движения необходима автоматическая система контроля скорости транспортного средства, которая будет эффективно влиять на скорость движения и поощрять водителей соблюдать ограничения скорости, значительно повышая безопасность. Функциональность такой системы будет варьироваться в зависимости от размера транспортного средства (автомобиль или грузовик) и основана на управлении скоростью транспортного средства с помощью микроконтроллера. Функции системы могут включать:
Информация о местоположении и скорости транспортного средства в режиме реального времени (обычно на основе GPS)
Информация в режиме реального времени о существующих ограничениях скорости и возможных опасных зонах
Обратная связь в режиме реального времени в автомобиле о превышении скорости
Функции дистанционного управления
Доступ в любое время и в любом месте через смартфон или планшет
Автоматизация управления автопарком — функции, преимущества, стоимость
ЧТО КОМПАНИИ ВОЗМОЖНО НУЖНО РАЗРАБОТАТЬ СИСТЕМУ УПРАВЛЕНИЯ СКОРОСТЬЮ АВТОМОБИЛЯ?
Есть много компаний, которые обеспечивают ограничение скорости с помощью интеллектуальных транспортных систем. Они используют их для обеспечения безопасности своего флота, отслеживания имущества, наблюдения и т. д.
Они используют их для обеспечения безопасности своего флота, отслеживания имущества, наблюдения и т. д.
Компании по аренде автомобилей используют системы управления скоростью как часть своего программного обеспечения по аренде автомобилей, чтобы отслеживать парк арендованных автомобилей и выставлять счета за опасное вождение. Водителям арендованных транспортных средств могут быть предоставлены подлежащие погашению кредиты за расстояние, пройденное ими в пределах установленного ограничения скорости, или им может быть выписана надбавка за расстояние, пройденное при превышении скорости. Более того, получая информацию о состоянии автомобиля в режиме реального времени, прокатная компания имеет возможность оперативно реагировать на поломки и аварии.
Страховые компании все чаще используют автомобильные системы контроля скорости для контроля за вождением своих клиентов, что позволяет им снизить страховые взносы и затраты на расчеты.
Устройства контроля скорости обычно устанавливаются на автомобили, застрахованные компанией, и обеспечивают удаленный доступ к телеметрии автомобиля. Получая данные о вождении транспортных средств и водителей в режиме реального времени (расстояние в пути, время вождения и опасное поведение за рулем), страховая компания может проанализировать и выяснить реальный уровень риска своих клиентов. Затем компания может адаптировать политику со скидками для ответственных клиентов с низким уровнем риска.
Получая данные о вождении транспортных средств и водителей в режиме реального времени (расстояние в пути, время вождения и опасное поведение за рулем), страховая компания может проанализировать и выяснить реальный уровень риска своих клиентов. Затем компания может адаптировать политику со скидками для ответственных клиентов с низким уровнем риска.
Продавцы автомобилей устанавливают устройства контроля ограничения скорости на новые автомобили, которые они продают, с рассрочкой платежа, чтобы отслеживать, насколько безопасно управляется автомобиль и где он находится.
Читайте также: Как создать лучшее программное обеспечение для автомобильных дилеров
Даже государственные органы, занимающиеся регулированием движения транспортных средств, используют технологию управления скоростью автомобиля в программах контроля скорости для снижения скорости и предотвращения аварий.
Несмотря на то, что существуют правительственные постановления, требующие установки регуляторов скорости для транспортных средств, данные опроса показывают, что в большинстве европейских стран большой процент водителей по-прежнему ездит со скоростью, превышающей разрешенную скорость.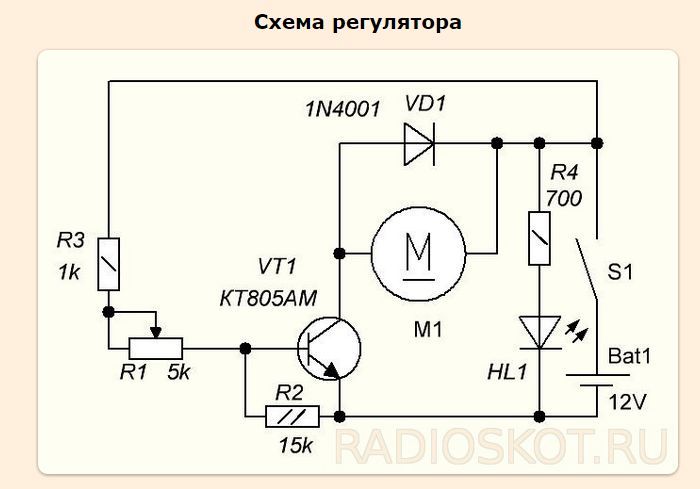 Обычно от 40% до 60% водителей превышают ограничение, а от 10 до 20% превышают ограничение скорости более чем на 10 км/ч. Таким образом, система контроля скорости автомобиля, которая предупреждает водителя о текущих ограничениях скорости на дороге, была бы очень полезной.
Обычно от 40% до 60% водителей превышают ограничение, а от 10 до 20% превышают ограничение скорости более чем на 10 км/ч. Таким образом, система контроля скорости автомобиля, которая предупреждает водителя о текущих ограничениях скорости на дороге, была бы очень полезной.
Европейский Союз активно продвигает систему интеллектуальной адаптации скорости (ISA), которая сравнивает фактическую скорость автомобиля с ограничениями скорости в определенных местах. На веб-сайте Европейской комиссии говорится, что ISA помогает водителям соблюдать ограничения скорости в любой точке сети.
Объединенные Арабские Эмираты активно используют системы мониторинга дорожного движения, наблюдения и правоохранительных органов в повседневной жизни страны и внедрили бортовые системы управления дорожным движением для отслеживания опасного вождения и реагирования на чрезвычайные ситуации.
Законодатели Австралии рекомендовали, чтобы хронические водители были обязаны оснащать свои автомобили устройствами слежения, чтобы полиция могла отслеживать их вождение.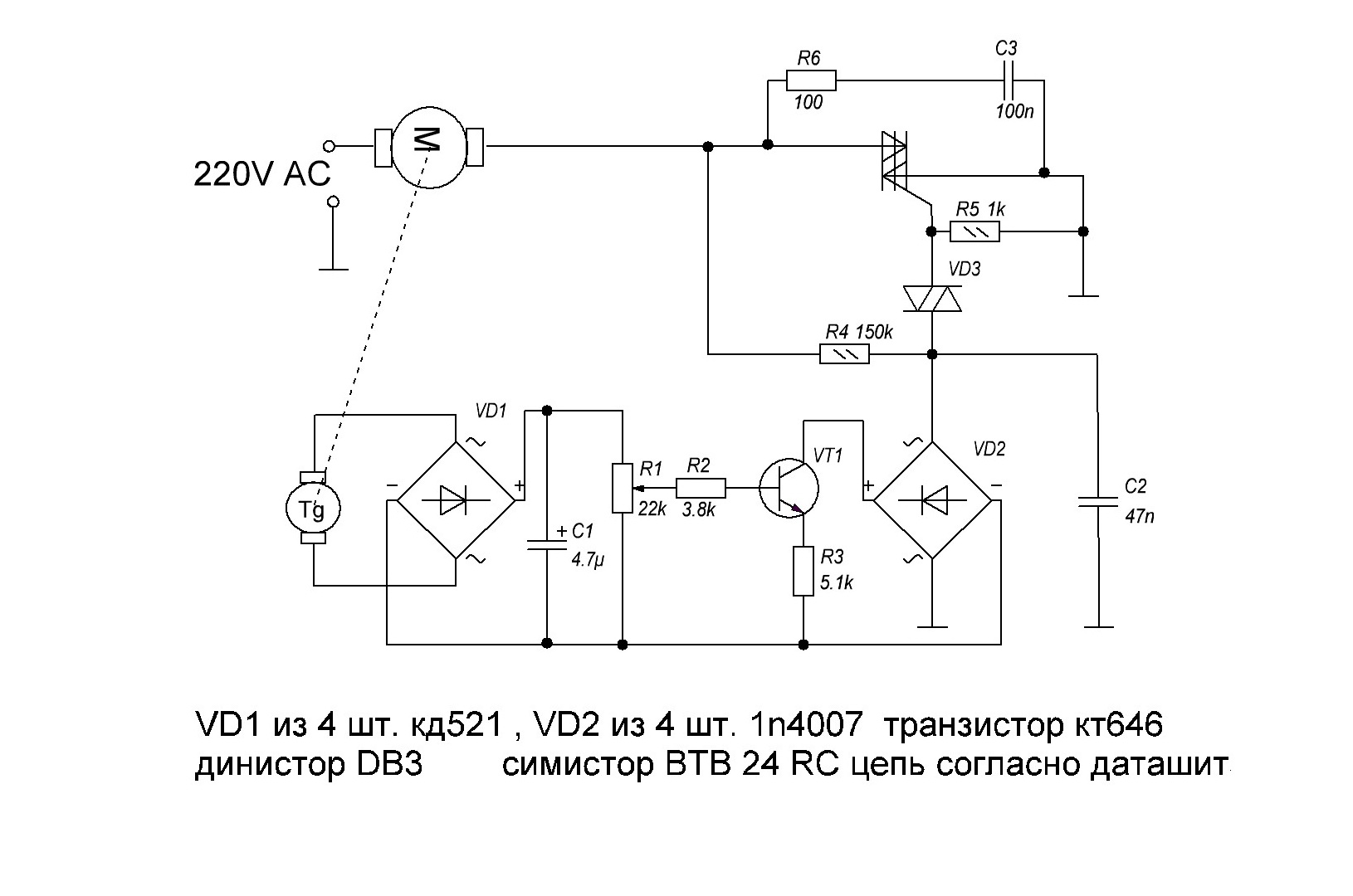
Как технологии могут изменить, ускорить или разрушить ваш путь на автомобильный рынок
ЧТО НЕОБХОДИМО ДЛЯ РАЗРАБОТКИ СИСТЕМЫ УПРАВЛЕНИЯ СКОРОСТЬЮ АВТОМОБИЛЯ?
Прежде всего, вам нужно устройство, которое может считывать текущие данные автомобиля, которые доступны. Автомобили, произведенные с середины 1990-х годов, обычно имеют порт для считывания данных об автомобиле и могут быть оснащены устройством для подключения к автомобилю.
Устройства контроля скорости автомобиля, которые могут считывать данные с автомобиля, обычно подключаются к бортовому диагностическому порту автомобиля (порт OBD-II), расположенному рядом с рулевой колонкой.
Наконец, необходимо специальное программное обеспечение для обработки данных автомобиля и предупреждения водителя о потенциально опасных ситуациях и нарушениях скоростного режима.
Например, портфолио Archer-soft включает в себя решение для мониторинга поведения при вождении и управления безопасностью для отслеживания транспортных средств, а также анализа и улучшения работы водителя.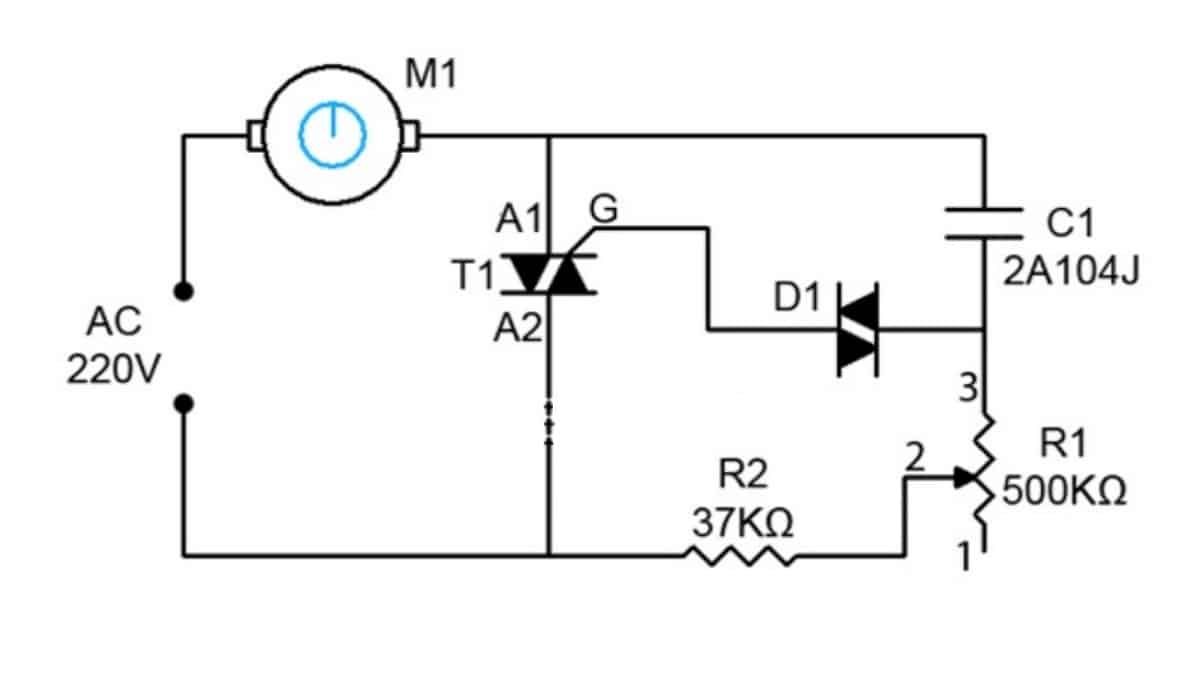 Ключевые особенности этого решения:
Ключевые особенности этого решения:
Отслеживание автомобиля в режиме реального времени при агрессивном вождении и превышении скорости
Отслеживание автомобиля в режиме реального времени Управление холостым ходом и скоростью
Настраиваемые информационные панели и отчеты
Оповещения в режиме реального времени
Доступ в любое время и в любом месте через смартфон или планшет
ЭТО ОГРАНИЧИТЕЛЬ СКОРОСТИ АВТОМОБИЛЯ ПОЛЕЗНА СИСТЕМА ДЛЯ ОБЫЧНЫХ ВОДИТЕЛЕЙ?
Любой, кто выбирает систему контроля скорости автомобиля, естественным образом адаптирует свое поведение за рулем, получая отзывы о своем вождении. Многие ответственные водители и те, кто хочет улучшить свое вождение, выбирают такую систему. Это также помогает снизить распространенные ошибки, совершаемые неопытными водителями, которые даже не осознают, что вождение опасно.
Одной из возможных функций программного обеспечения для управления скоростью может быть подключение к социальным сетям. Водители могли делиться своими достижениями в области безопасного вождения с друзьями через подключенный смартфон или планшет. Они даже могут начать соревнование по безопасному вождению, чтобы стать самым безопасным водителем среди своих друзей.
Они даже могут начать соревнование по безопасному вождению, чтобы стать самым безопасным водителем среди своих друзей.
Системы ограничения скорости могут быть чрезвычайно полезны для водителей электромобилей, которые слишком тихие и плавные, чтобы чувствовать скорость транспортного средства. Звуковые сигналы и виртуальные звуки двигателя, производимые системой, сообщат водителю о превышении скорости, что повысит безопасность этих транспортных средств.
Читайте также: Топ-6 программ для диагностики автомобилей для Windows и Mac
И, конечно же, системы управления скоростью отлично подходят для коммерческих легковых автомобилей, поскольку на некоторых автомагистралях и дорогах иногда действуют разные ограничения скорости для легковых автомобилей. Голосовые оповещения и звуковые подсказки гарантируют, что водители соблюдают ограничения и безопасно доставляют своих пассажиров к месту назначения.
Мы будем рады предоставить вам индивидуальную систему ограничения скорости, которую вы можете представить на рынке для личного или коммерческого использования.