


что это такое, как работает, для чего нужно, возможные проблемы, плюсы и минусы
История Can шины
Мало кто знает, что самые первые автомобили не имели абсолютно никакой электрики. Все что нужно было тогдашним водителям – это специальное магнитоэлектрическое приспособление для запуска мотора, которое способно было из кинетической выработать электроэнергию. Не мудрено, что такая примитивная система доставляла некие неудобства и соответственно постоянно модернизировалась.
Так из года в год, проводов и соответственно различных датчиков становилось все больше. Дошло до того, что по электрическому оснащению автомобиль уже начали сравнивать с самолетом. Именно тогда в 1970 году, стало очевидно – для бесперебойной работы, все цепи нужно рационализировать. Спустя 13 лет, ситуацию под свой контроль взял уже культовый бренд из Германии под названием Bosch. Как следствие, в 1986 году в Детройте был представлен инновационный протокол Controller Area Network (CAN).
Однако, даже после официальной презентации, наработка оставалась мягко говоря «сыроватой», поэтому работа над ней продолжалась.
1987 г. – завершились практические тесты can шины, которые вызвались провести не менее знаменитые бренды в сфере компьютерных технологий Philips и Intel.
1988 г. – уже на следующий год еще один немецкий автогигант BMW представил первый автомобиль, работающий по технологии can шины, это была любимая всеми модель 8-серии.
1993 г. – международное признание и соответственно сертификат «ИСО».
2001 г. – кардинальные перемены в стандартах, теперь любой европейский автомобиль должен функционировать по принципу «КАН».
2012 г. – последнее обновление механизма, которое увеличило список совместимых устройств и скорость передачи данных.
Вот такой вот длинный путь прошел наш «директор» электрических приборов. Сами видите стаж не малый, поэтому столь высокое положение абсолютно по делу).
CAN-шина – это электронное устройство, встроенное в электронную систему автомобиля для контроля технических характеристики и ездовых показателей. Она является обязательным элементом для оснащения автомобиля противоугонной системой, но это лишь малая часть её возможностей.
Она является обязательным элементом для оснащения автомобиля противоугонной системой, но это лишь малая часть её возможностей.
Что такое CAN шина?
CAN-шина – это одно из устройств в электронной автоматике автомобиля, на которое возлагается задача по объединению различных датчиков и процессоров в общую синхронизированную систему. Она обеспечивает сбор и обмен данными, посредством чего в работу различных систем и узлов машины вносятся необходимые корректировки.
Аббревиатура CAN расшифровывается как Controller Area Network, то есть сеть контроллеров. Соответственно, CAN-шина – это устройство, принимающее информацию от устройств и передающее между ними. Данный стандарт был разработан и внедрён более 30 лет назад компанией Robert Bosch GmbH. Сейчас его используются в автомобилестроении, промышленной автоматизации и сфере проектирования объектов, обозначаемых «умными», например, домов.
Как работает CAN шина
Фактически, шина представляет собой компактное устройство со множеством входов для подключения кабелей или разъём, к которому подсоединяются кабели. Принцип её действия заключается в передаче сообщений между разными компонентами электронной системы.
Принцип её действия заключается в передаче сообщений между разными компонентами электронной системы.
Для передачи разной информации в сообщения включаются идентификаторы. Они уникальны и сообщают, например, что в конкретный момент времени автомобиль едет со скоростью 60 км/ч. Серия сообщения отправляется на все устройства, но благодаря индивидуальным идентификаторам они обрабатывают только те, которые предназначаются именно для них. Идентификаторы CAN-шины могут иметь длину от 11 до 29 бит.
В зависимости от назначения КАН шины разделяются на несколько категорий:
- Силовые. Они предназначены для синхронизации и обмена данными между электронным блоком двигателя и антиблокировочной системой, коробкой передач, зажиганием, другими рабочими узлами автомобиля.
- Комфорт. Эти шины обеспечивают совместную работу цифровых интерфейсов, которые не связаны с ходовыми блоками машины, а отвечают за комфорт. Это система подогрева сидений, климат-контроль, регулировка зеркал и т.
 п.
п. - Информационно-командные. Эти модели разработаны для оперативного обмена информацией между узлами, отвечающими за обслуживание авто. Например, навигационной системой, смартфоном и ЭБУ.
Для чего CAN шина в автомобиле
Распространение интерфейса КАН в автомобильной сфере связано с тем, что он выполняет ряд важных функций:
- упрощает алгоритм подсоединения и функционирования дополнительных систем и приборов;
- снижает влияние внешних помех на работу электроники;
- обеспечивает одновременное получение, анализ и передачу информации к устройствам;
- ускоряет передачу сигналов к механизмам, ходовым узлам и иным устройствам;
- уменьшает количество необходимых проводов;
В современном автомобиле цифровая шина обеспечивает работу следующих компонентов и систем:
- центральный монтажный блок и замок зажигания;
- антиблокировочная система;
- двигатель и коробка переключения передач;
- подушки безопасности;
- рулевой механизм;
- датчик поворота руля;
- силовой агрегат;
- электронные блоки для парковки и блокировки дверей;
- датчик давления в колёсах;
- блок управления стеклоочистителями;
- топливный насос высокого давления;
- звуковая система;
- информационно-навигационные модули.

Этот не полный список, так как в него не включаются внешние совместимые приборы, которые тоже можно соединить с шиной. Часто таким образом подключается автомобильная сигнализация. CAN-шина также доступна для подключения внешних устройств для мониторинга рабочих показателей и диагностики на ПК. А при подключении автосигнализации вместе с маяком можно управлять отдельными системами извне, например, со смартфона.
Возможные проблемы с CAN шиной
По причине включения во многие функциональные процессы, неполадки в работе CAN-шины проявляются очень быстро. Среди признаков нарушений чаще всего проявляются:
- индикация вопросительного знака на приборной панели;
- одновременное свечение нескольких лампочек, например, CHECK ENGINE и ABS;
- исчезновение показателей уровня топлива, оборотов двигателя, скорости на приборной панели.
Такие проблемы возникают по разным причинам, связанным с питанием или нарушением электроцепи. Это может быть замыкание на массу или аккумулятор, обрыв цепи, повреждение перемычек, падение напряжения из-за проблем с генератором или разряд АКБ.
Это может быть замыкание на массу или аккумулятор, обрыв цепи, повреждение перемычек, падение напряжения из-за проблем с генератором или разряд АКБ.
Первая мера для проверки шины – компьютерная диагностика всех систем. Если она показывает шину, необходимо измерить напряжение на выводах H и L (должно быть ~4V) и изучить форму сигнала на осциллографе под зажиганием. Если сигнала нет или он соответствует напряжению сети, налицо замыкание или обрыв.
Ввиду сложности системы и большого количества подключений компьютерную диагностику и устранение неисправностей целесообразно передать в руки специалистов с высококачественным оборудованием.
Плюсы и минусы CAN шины
Специалисты по автомобильной электронике, высказываясь в пользу использования CAN-интерфейса, отмечают следующие преимущества:
Введение в протокол CAN | CAN — технологии
Промышленная сеть реального времени CAN представляет собой сеть с общей средой передачи данных.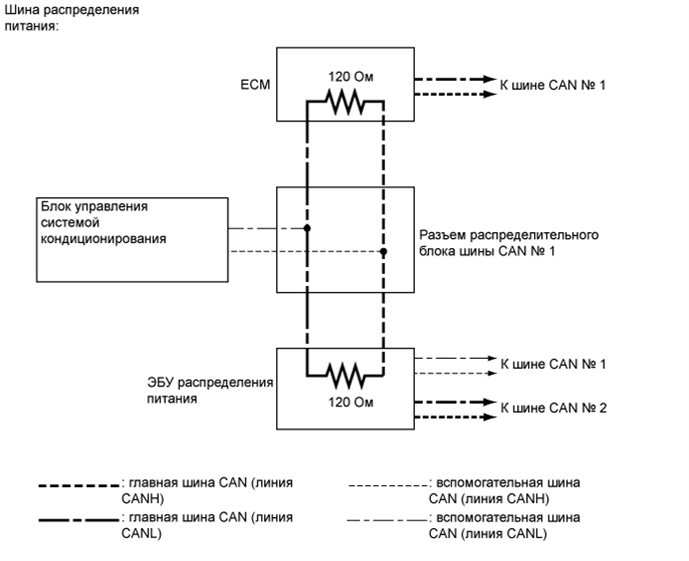 Это означает, что все узлы сети одновременно принимают сигналы передаваемые по шине. Невозможно послать сообщение какому-либо конкретному узлу. Все узлы сети принимают весь трафик передаваемый по шине. Однако, CAN-контроллеры предоставляют аппаратную возможность фильтрации CAN-сообщений.
Это означает, что все узлы сети одновременно принимают сигналы передаваемые по шине. Невозможно послать сообщение какому-либо конкретному узлу. Все узлы сети принимают весь трафик передаваемый по шине. Однако, CAN-контроллеры предоставляют аппаратную возможность фильтрации CAN-сообщений.
Каждый узел состоит из двух составляющих. Это собственно CAN контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU).
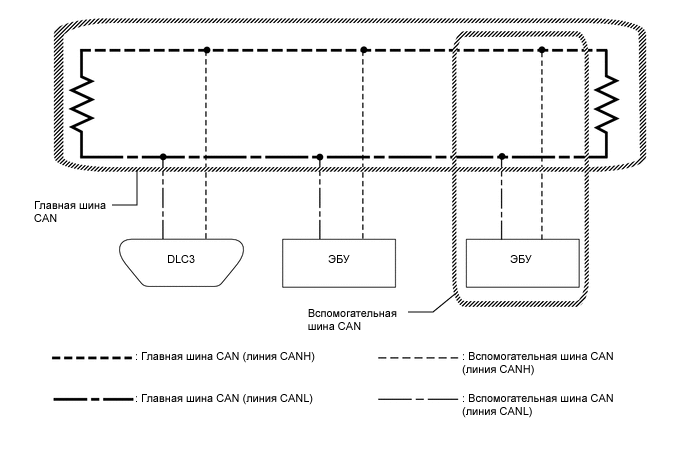
CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии — CAN_H (can-high) и CAN_L (can-low), по которым передаются сигналы. Логический ноль регистрируется, когда на линии CAN_H сигнал выше, чем на линии CAN_L. Логическая единица — в случае когда сигналы CAN_H и CAN_L одинаковы (отличаются менее чем на 0.5 В). Использование такой дифференциальной схемы передачи делает возможным работу CAN сети в очень сложных внешних условиях. Логический ноль — называется доминантным битом, а логическая единица — рецессивным. Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).
Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).
Типы сообщений сети CAN.
Данные в CAN передаются короткими сообщениями-кадрами стандартного формата. В CAN существуют четыре типа сообщений:
- Data Frame
- Remote Frame
- Error Frame
- Overload Frame
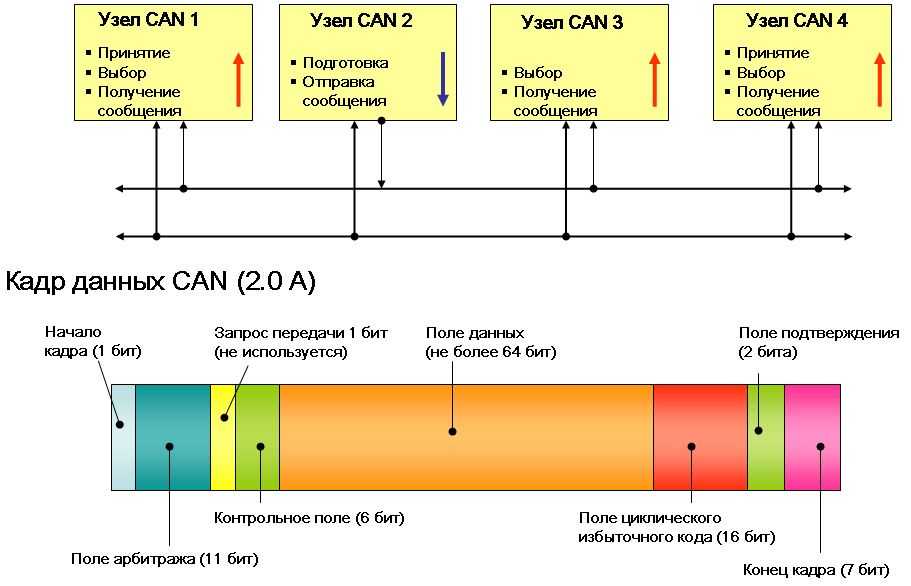
Data Frame — это наиболее часто используемый тип сообщения. Он состоит из следующих основных частей:
- поле арбитража (arbitration field) определяет приоритет сообщения в случае, когда два или более узлов одновременно пытаются передать данные в сеть. Поле арбитража состоит в свою очередь из:
- для стандарта CAN-2.0A, 11-битного идентификатора + 1 бит RTR (retransmit)
- для стандарта CAN-2.0B, 29-битного идентификатора + 1 бит RTR (retransmit)
Следует отметить, что поле идентификатора, несмотря на свое название никак не идентифицирует само по себе ни узел в сети, ни содержимое поля данных.

- поле данных (data field) содержит от 0 до 8 байт данных
- поле CRC (CRC field) содержит 15-битную контрольную сумму сообщения, которая используется для обнаружения ошибок
- слот подтверждения (Acknowledgement Slot) (1 бит), каждый CAN-контроллер, который правильно принял сообщение посылает бит подтверждения в сеть. Узел, который послал сообщение слушает этот бит, и в случае если подтверждение не пришло, повторяет передачу. В случае приема слота подтверждения передающий узел может быть уверен лишь в том, что хотя бы один из узлов в сети правльно принял его сообщение.
Remote Frame — это Data Frame без поля данных и с выставленным битом RTR (1 — рецессивные бит). Основное предназначение Remote кадра — это инициация одним из узлов сети передачи в сеть данных другим узлом. Такая схема позволяет уменьшить суммарный трафик сети.
Error Frame — это сообщение которое явно нарушает формат солобщения CAN. Передача такого сообщения приводит к тому, что все узлы сети регистрируют ошибку формата CAN-кадра, и в свою очередь автоматически передают в сеть Error Frame. Результатом этого процесса является автоматическая повторная передача данных в сеть передающим узлом. Error Frame состоит из поля Error Flag, которое состоит из 6 бит одинакового значения (и таким образом Error frame нарушает проверку Bit Stuffing, см. ниже), и поля Error Delimiter, состоящее из 8 рецессивных битов. Error Delimiter дает возможность другим узлам сети обнаружив Error Frame послать в сеть свой Error Flag.
Overload Frame — повторяет структуру и логику работы Error кадра, с той разницей, что он используется перегруженным узлом, который в данный момент не может обработать поступающее сообщение, и поэтому просит при помощи Overload-кадра о повторной передаче данных. В настоящее время Overload-кадр практически не используется.
В настоящее время Overload-кадр практически не используется.
Контроль доступа к среде передачи (побитовый арбитраж).
Поле арбитража CAN-кадра используется в CAN для разрешения коллизий доступа к шине методом не деструктивного арбитража. Суть метода не деструктивного арбитража заключается в следующем. В случае, когда несколько контроллеров начинают одновременную передачу CAN кадра в сеть, каждый из них сравнивает, бит, который собирается передать на шину с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера передают следующий бит. И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал) будет продолжать передачу, а другой (другие) контроллер прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента её освобождения.
Методы обнаружения ошибок.
CAN протокол определяет пять способов обнаружения ошибок в сети:
- Bit monitoring
- Bit stuffing
- Frame check
- ACKnowledgement Check
- CRC Check
Bit monitoring — каждый узел во время передачи битов в сеть сравнивает значение передаваемого им бита со значением бита которое появляется на шине. Если эти значения не совпадают, то узел генерирует ошибку Bit Error. Естественно, что во время арбитража на шине (передача поля арбитража в шину) этот механизм проверки ошибок отключается.
Bit stuffing — когда узел передает последовательно в шину 5 бит с одинаковым значением, то он добавляет шестой бит с противоположным значением. Принимающие узлы этот дополнительный бит удаляют. Если узел обнаруживает на шине больше 5 последовательных бит с одинаковым значением, то он генерирует ошибку Stuff Error.
Frame Check — некоторые части CAN-сообщения имеют одинаковое значение во всех типах сообщений. Т.е. протокол CAN точно определяет какие уровни напряжения и когда должны появляться на шине. Если формат сообщений нарушается, то узлы генерируют ошибку Form Error.
CRC Check — каждое сообщение CAN содержит CRC сумму, и каждый принимающий узел подсчитывает значение CRC для каждого полученного сообщения. Если подсчитанное значение CRC суммы, не совпадает со значением CRC в теле сообщения, принимающий узел генерирует ошибку CRC Error.
Механизм ограничения ошибок (Error confinement).
Каждый узел сети CAN, во время работы пытается обнаружить одну из пяти возможных ошибок. Если ошибка обнаружена, узел передает в сеть Error Frame, разрушая тем самым весь текущий трафик сети (передачу и прием текущего сообщения). Все остальные узлы обнаруживают Error Frame и принимают соответствующие действия (сбрасывают принятое сообщение). Кроме того, каждый узел ведет два счетчика ошибок: Transmit Error Counter (счетчик ошибок передачи) и Receive Error Counter (счетчик ошибок приема). Эти счетчики увеличиваются или уменьшаются в соответствие с несколькими правилами. Сами правила управления счетчиками ошибок достаточно сложны, но сводятся к простому принципу, ошибка передачи приводит к увеличению Transmit Error счетчика на 8, ошибка приема увеличивает счетчик Receive Error на 1, любая корректная передача/прием сообщения уменшают соответствующий счетчик на 1. Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Все остальные узлы обнаруживают Error Frame и принимают соответствующие действия (сбрасывают принятое сообщение). Кроме того, каждый узел ведет два счетчика ошибок: Transmit Error Counter (счетчик ошибок передачи) и Receive Error Counter (счетчик ошибок приема). Эти счетчики увеличиваются или уменьшаются в соответствие с несколькими правилами. Сами правила управления счетчиками ошибок достаточно сложны, но сводятся к простому принципу, ошибка передачи приводит к увеличению Transmit Error счетчика на 8, ошибка приема увеличивает счетчик Receive Error на 1, любая корректная передача/прием сообщения уменшают соответствующий счетчик на 1. Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Каждый узел CAN сети может находится в одном из трех состояний. Когда узел стартует он находится в состоянии Error Active. Когда, значение хотя бы одного из двух счетчиков ошибок превышает предел 127, узел переходит в состояние Error Passive. Когда значение хотя бы одного из двух счетчиков превышает предел 255, узел переходит в состояние Bus Off.
Когда, значение хотя бы одного из двух счетчиков ошибок превышает предел 127, узел переходит в состояние Error Passive. Когда значение хотя бы одного из двух счетчиков превышает предел 255, узел переходит в состояние Bus Off.
Узел находящийся в состоянии Error Active в случае обнаружения ошибки на шине передает в сеть Active Error Flags. Active Error Flags сотстоит из 6 доминантных бит, поэтому все узлы его регистрируют. Узел в состоянии Passive Error передает в сеть Passive Error Flags при обнаружении ошибки в сети. Passive Error Flags состоит из 6 рецессивных бит, поэтому остальные узлы сети его не замечают, и Passive Error Flags лишь приводит к увеличению Error счетчика узла. Узел в состоянии Bus Off ничего не передает в сеть (не только Error кадры, но вообще никакие другие).
Адресация и протоколы высокого уровня
В CAN не существует явной адресации сообщений и узлов. Протокол CAN нигде не указывает что поле арбитража (Identification field + RTR) должно использоваться как идентификатор сообщения или узла.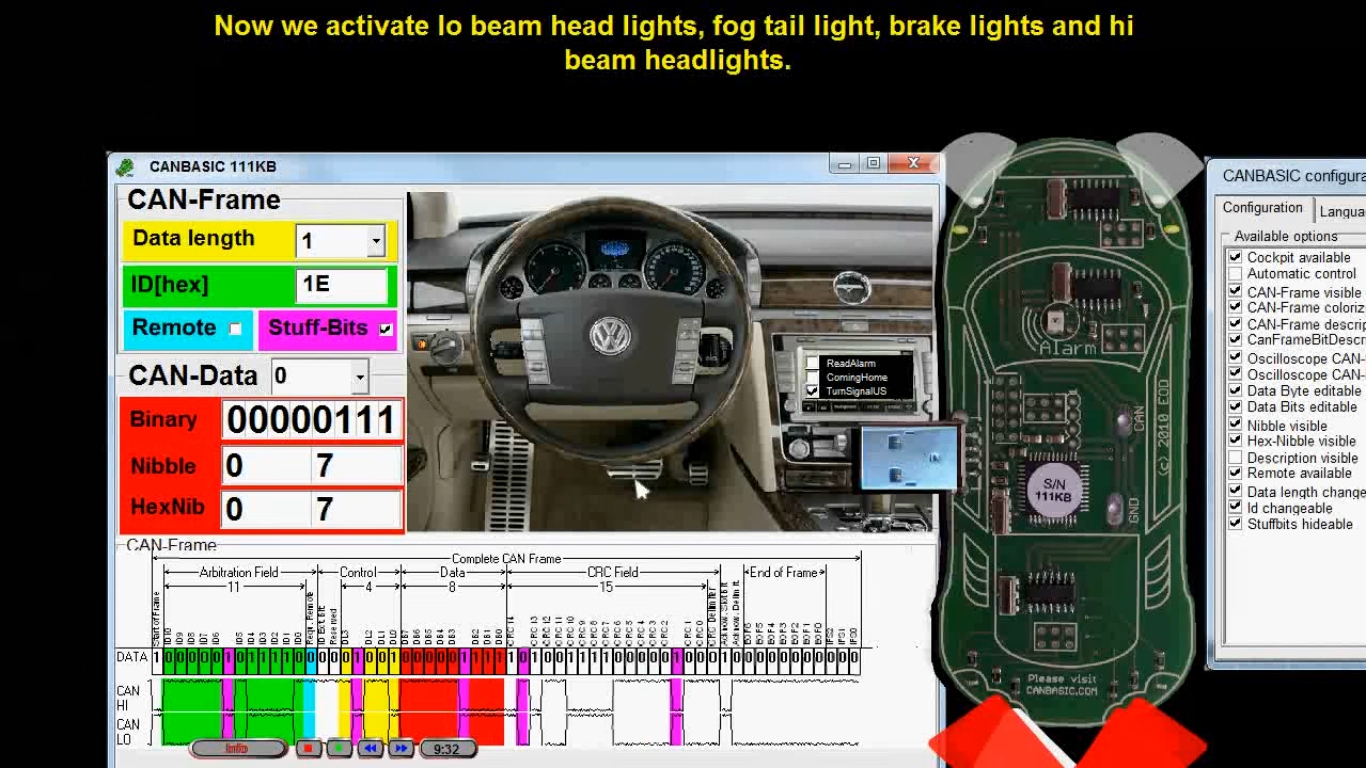 Таким образом, идентификаторы сообщений и адреса узлов могут находится в любом поле сообщения (в поле арбитража или в поле данных, или присутствовать и там, и там). Точно также протокол не запрещает использовать поле арбитража для передачи данных.
Таким образом, идентификаторы сообщений и адреса узлов могут находится в любом поле сообщения (в поле арбитража или в поле данных, или присутствовать и там, и там). Точно также протокол не запрещает использовать поле арбитража для передачи данных.
Утилизация поля арбитража и поля данных, и распределение адресов узлов, идентификаторов сообщений и приоритетов в сети является предметом рассмотрений так называемых протоколов высокого уровня (HLP — Higher Layer Protocols). Название HLP отражает тот факт, что протокол CAN описывает только два нижних уровня эталонной сетевой модели ISO/OSI, а остальные уровни описываются протоколами HLP.
Существует множество таких высокоуровневых протоколов. Наиболее распространенные из них это:
- DeviceNet
- CAL/CANopen
- SDS
- CanKingdom
Физичекий уровень протокола CAN
Физический уровень (Physical Layer) протокола CAN определяет сопротивление кабеля, уровень электрических сигналов в сети и т.
В подавляющем большинстве случаев используется физический уровень CAN определенный в стандарте ISO 11898. ISO 11898 в качестве среды передачи определяет двухпроводную дифференциальную линию с импедансом (терминаторы) 120 Ом (допускается колебание импеданса в пределах от 108 Ом до 132 Ом. Физический уровень CAN реализован в специальных чипах — CAN приемо-передатчиках (transceivers), которые преобразуют обычные TTL уровни сигналов используемых CAN-контроллерами в уровни сигналов на шине CAN. Наиболее распространенный CAN приемо-передатчик — Phillips 82C250, который полностью соответствует стандарту ISO 11898.
Махимальная скорость сети CAN в соответствие с протоколом равна 1 Mbit/sec. При скорости в 1 Mbit/sec максимальная длина кабеля равна примерно 40 метрам. Ограничение на длину кабеля связано с конечной скоростью света и механизмом побитового арбитража (во время арбитража все узлы сети должны получать текущий бит передачи одновременно, те сигнал должен успеть распространится по всему кабелю за единичный отсчет времени в сети.
| скорость передачи | максимальная длина сети |
| 1000 Кбит/сек | 40 метров |
| 500 Кбит/сек | 100 метров |
| 250 Кбит/сек | 200 метров |
| 125 Кбит/сек | 500 метров |
| 10 Кбит/сек | 6 километров |
Разъемы для сети CAN до сих пор НЕ СТАНДАРТИЗОВАНЫ. Каждый протокол высокого уровня обычно определяет свой тип разъемов для CAN-сети.
‹ Шина CAN Вверх Спецификация протокола CAN 2.0 ›
Протокол шины CAN: Полное руководство (2023)
Шина CAN расшифровывается как Контроллер
Связь по локальной сети и состоит из двух электрических проводов, называемых CAN_Low и CAN_High. Информация внутри
каждый
транспортное средство передается от и к ЭБУ.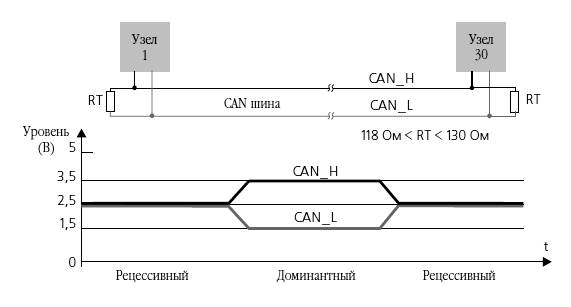 Кроме того, шина CAN
создан для надежной работы в суровых условиях.
Кроме того, шина CAN
создан для надежной работы в суровых условиях.
Мы подготовили простое введение в CAN-шину. Было рассмотрено несколько тем, чтобы дать вам лучшее объяснение протокола CAN.
Работая над статьей, мы объединили знания от наших ведущих экспертов внутри компании, а также от членов команды, не являющихся экспертами.
Почему? Идея заключалась в том, чтобы написать профессиональное, но простое введение в CAN-шину для всех, нет независимо от того, сколько у вас опыта.
В заключение, не имеет значения, если вы вообще ничего не знаете о протоколе CAN-шины или если вы уже являетесь про. Это простое руководство по вводу в CAN-шину дать вам всю необходимую информацию.
Что такое CAN-шина?
Шина CAN — это набор из двух электрических проводов в сети автомобиля (CAN_Low и CAN_High), где
информация отправляется в и из ЭБУ. Сеть, которая позволяет ЭБУ обмениваться данными, называется зоной контроллера.
Сеть
(МОЖЕТ).
Сеть, которая позволяет ЭБУ обмениваться данными, называется зоной контроллера.
Сеть
(МОЖЕТ).
Шина CAN представляет собой последовательную коммуникационную шину, предназначенную для надежной работы в неблагоприятных условиях. прежде всего в промышленности и автомобилестроении.
Это стандарт автомобильной шины, который позволяет микроконтроллерам и устройствам взаимодействовать друг с другом. другой.
Шина CAN является одним из протоколов, используемых в бортовом Диагностика (ОБД). В настоящее время OBD-2 является обязательным для всех новых автомобилей и легких грузовиков. вокруг глобус.
Система шины CAN легко объяснима
Попробуем взглянуть на это с другой точки зрения.
Представьте, что автомобиль подобен человеческому телу, а нервная система в человеческом теле — это Контроллер. Область
Сеть (шина CAN) в автомобиле, которая также обеспечивает связь.
Область
Сеть (шина CAN) в автомобиле, которая также обеспечивает связь.
узлы или электронные блоки управления (ЭБУ) — это что-то вроде частей тела, которые связаны между собой через Связь по CAN-шине. Информация может быть легко передана между сторонами. Это намного проще понимать, не так ли?
Система шины CAN
В зависимости от типа автомобиля, он может иметь до 70 ECU (электронных блоков управления), и каждый из них должен использоваться совместно с другими частями системы. сеть.
Думайте об ЭБУ как о чем-то конкретном
люди. Один ECU может формировать и передавать информацию по шине CAN другим ECU, которые принимают данные. После
что они проверят данные и решат, хотят ли они их получить или проигнорировать.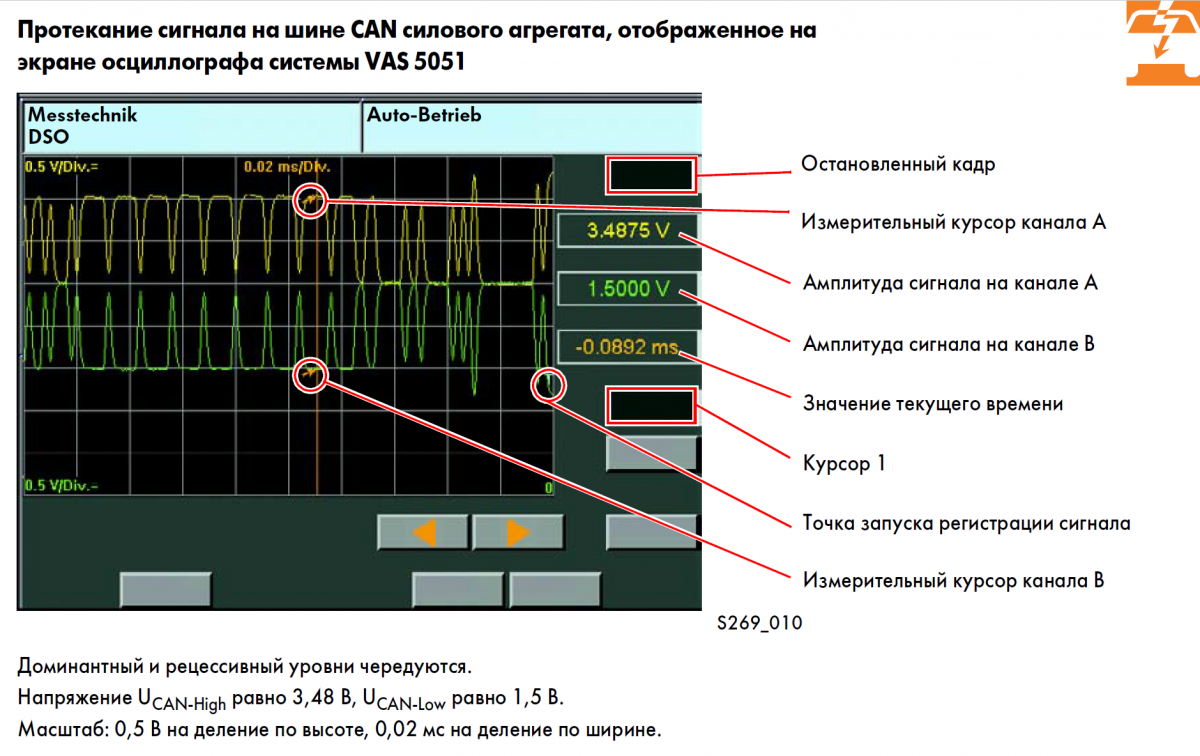
Шина CAN использует два провода для связь — CAN low и CAN high (CANL и CAN H). ISO 11898-2 описывает физический уровень шины CAN, а ISO 11898-1 описывает канальный уровень.
Физический уровень представляет типы кабелей, требования к узлам, уровни электрических сигналов, импеданс кабеля, и т. д.
С другой стороны, ISO 11898-2 представляет такие параметры, как скорость передачи данных, длина кабеля и подключение.
Длина кабеля должна быть 40 метров (1 Мбит/с) или 500 метров (125 кбит/с).
Шина CAN должна быть терминирована с помощью резистора шины CAN 120 Ом на конце каждой шины.
Узлы CAN должны быть подключены через двухпроводную шину со скоростью передачи данных до 1 Мбит/с (CAN) или 5 Мбит/с.
 (МОЖЕТ
ФД).
(МОЖЕТ
ФД).
Пять преимуществ протокола шины CAN
Стандарт шины CAN обычно используется во всех транспортных средствах благодаря его ключевым преимуществам, таким как:
Прочность
Стандарт шины CAN идеально подходит для приложений безопасности, таких как транспортные средства, благодаря своей долговечности и надежности. надежность. Также имеется 5 механизмов для обнаружения ошибок в протоколе CAN, таких как вставка битов, мониторинг битов, рамка проверка, проверка подтверждения и проверка циклическим избыточным кодом.
Недорогой
Когда был создан протокол CAN, его целью было обеспечение быстрой связи между электронными устройства и модулей, уменьшая при этом количество ошибок, вес, проводку и затраты.

Скорость
В настоящее время определяется двумя физическими уровнями — High-Speed CAN (CAN h) и Low-Speed CAN (CAN L), оба со своими преимуществами. и недостатки.
Гибкость
Протокол шины CAN хорошо известен как протокол, основанный на сообщениях, что означает, что узлы могут быть легко добавлены или удалены. без выполнения каких-либо обновлений в системе. Это позволяет инженерам легко интегрировать новые электронных устройств без существенного программирования и модифицировать его под свои требования.
Эффективность
Высокоприоритетные данные будут иметь приоритет по идентификатору, чтобы получить немедленный доступ к шине, не прерывая другой кадры.

Проводка CAN-шины
Одно из лучших преимуществ шины CAN это уменьшенное количество проводов в сочетании с изобретательным предотвращением коллизии сообщений.
Другими словами, никакие данные не будут потеряны во время передачи сообщения.
Два приведенных ниже примера иллюстрируют Протокол CAN и как это будет выглядеть с системой шины CAN и без системы шины CAN.
Очевидно, что с шиной CAN узлам намного проще общаться и перемещаться по ней.
С другой стороны, без CAN-шины узлам гораздо труднее взаимодействовать друг с другом и общение малоэффективно.
Существует несколько различных типов сетей. Вы можете найти простое объяснение ниже.
Высокоскоростная шина CAN (ISO 11898)
Поддерживает скорость передачи от 40 кбит/с до 1 Мбит/с.

Простая кабельная разводка.
Большинство обычно используется в наши дни.
Основа для протоколов более высокого уровня, таких как OBD2, CANopen, j1939 и другие.
Низкоскоростная шина CAN
Поддерживает скорость передачи от 40 кбит/с до 125 кбит/с.
Позволяет продолжать связь, несмотря на неисправность одного из двух проводов.
Также известен как отказоустойчивый CAN.
Каждый узел CAN имеет собственное окончание CAN.

LIN-шина
Недорогая добавка.
Меньше обвязки.
Более дешевые узлы.
Обычно состоит из шины LIN мастер, который работает как шлюз — до 16 ведомых узлов.
Обычно включает в себя функции автомобиля, такие как функциональность дверей или кондиционер.
Автомобильный Ethernet
Ethernet поддерживает высокие требования к пропускной способности Advanced Driver Вспомогательные системы (ADAS), камеры, информационно-развлекательные системы и так далее.

Обеспечивает гораздо более высокие скорости передачи данных, чем шина CAN.
Не хватает функций безопасности CAN и CAN FD.
Скорее всего, в ближайшие годы они будут широко использоваться в автомобильной промышленности. промышленность.
МОЖЕТ ФД
Обычно используется в современных высокопроизводительных автомобилях.
CAN FD является расширением оригинального CAN. автобус протокол.
Выпущен в 2012 году компанией Bosch.
Разработан для удовлетворения потребности в увеличении передачи данных.
Что такое кадр сообщения CAN?
Кадры CAN используются для связи по шине CAN. МОЖЕТ использовать дифференциальный сигнал с двумя логическими состояниями — доминирующий и рецессивный.
Сеть CAN использует два сообщения CAN — стандартное CAN и расширенное CAN, описанное ниже.
На изображении ниже показан типичный кадр CAN с 11-битной идентификацией, которая используется в большинстве автомобилей. За исключением большего ID, расширенный 29-битовый кадр идентификатора идентичен.
Стандартный CAN-фрейм
Первый бит — это начало
кадр (SOF), который представляет собой начало сообщения CAN . Следующим является 11-битный идентификатор, который
организует приоритет сообщения CAN. Чем меньше идентификатор, тем выше его приоритет.
Следующим является 11-битный идентификатор, который
организует приоритет сообщения CAN. Чем меньше идентификатор, тем выше его приоритет.
Запрос удаленной передачи (RTR) обычно является доминирующим, но становится рецессивным, когда узлы запрашивают данные друг у друга.
Следующий бит — это бит расширения идентификатора (IDE), который является доминирующим при отправке стандартного кадра CAN, а не расширенного один. Бит r0 инвертирован и в настоящее время не используется.
Следующий код длины данных (DLC), который указывает, сколько байтов данных содержится в текущем сообщении. Еще одна важная часть — данные. себя, что составляет то же количество байтов, что и в битах DLC.
Следующим является проверка циклическим избыточным кодом (CRC), представляющая собой 16-битную контрольную сумму, которая обнаруживает ошибки и проблемы.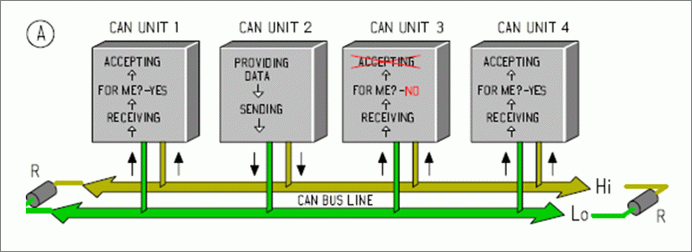 в
в
передаваемые данные.
в
в
передаваемые данные.
В случае, если сообщение получено правильно, принимающий узел перезапишет рецессивный бит подтверждения. (ACK) с доминирующий бит. Конец кадра (EOF) указывает на конец сообщения CAN.
Он имеет ширину 7 бит и обнаруживает ошибки вставки битов. Последняя часть сообщения CAN — это интеркадр. космос (IFS), который используется в качестве временной задержки.
Расширенный кадр CAN
Расширенный кадр CAN использует 29-битный идентификатор с парой дополнительных битов. Расширенный 29-битный идентификатор (CAN 2.0B) идентичен, но имеет более длинный идентификатор и обычно используется в j1939 протокол — большегрузные автомобили. CAN использует два логических состояния; доминантный и рецессивный.
Доминант
Указывает, что дифференциальное напряжение выше минимального порога.
 В
Кроме того,
доминирующий
состояние также достигается путем подачи логического «0» на шину.
В
Кроме того,
доминирующий
состояние также достигается путем подачи логического «0» на шину.Рецессивный
Указывает на то, что дифференциальное напряжение ниже минимального порога. С другой сторона, рецессивная состояние достигается логической «1».
Он также имеет замену пульта дистанционного управления бит запроса (SRR), который идет после 11-битного идентификатора и действует как заполнитель, чтобы сохранить такой же структурирован как стандартный кадр CAN.
Расширение идентификатора (IDE) должно быть рецессивным, а расширенный идентификатор
должны следовать ему соответственно.
Запрос удаленной передачи (RTR) идет сразу после 18-битного идентификатора. Обратный бит r1 следует по пути и остальная часть сообщения остается прежней.
Регистрация данных шины CAN
Регистрация данных CAN может выполняться с нескольких типов транспортных средств, таких как автомобили, техническое обслуживание и черный ящик машины.
Данные автомобиля есть собираются через порт OBD2 и обычно используются для снижения затрат на топливо, увеличения пробега автомобиля и многого другого.
С другой стороны, данные по большегрузным автомобилям собираются через j1939 и обычно используются для улучшения безопасность и снижение затрат.
Транспортные средства и механизмы могут быть
также контролируется через IoT CAN
регистраторы . Это можно сделать в облаке, чтобы избежать поломок. Регистратор CAN может
предоставить данные для споров или диагностики. Его еще называют черным ящиком.
Это можно сделать в облаке, чтобы избежать поломок. Регистратор CAN может
предоставить данные для споров или диагностики. Его еще называют черным ящиком.
Журналирование шины CAN обычно используется в управлении автопарком, благодаря его эффективности и расширению возможностей.
Регистратор CAN необходим для записать данные CAN. Это позволяет сохранять данные CAN с временными метками на SD-карте. В некоторых ситуациях интерфейс CAN требуется для передачи данных на ПК, например, при декодировании данных.
Пример: TMU SocketCAN
TMU SocketCAN позволяет с легкостью записывайте данные с любой шины CAN на карту Micro SD емкостью 8–32 ГБ. Просто прикрепите его к машине или грузовику, чтобы начать ведение журнала, а затем закодируйте данные с помощью нашего бесплатного программного обеспечения для управления.
Кроме того, TMU SocketCAN имеет WiFi, что позволяет автоматически загружать
данные на собственный сервер, а также обновлять устройства по беспроводной сети.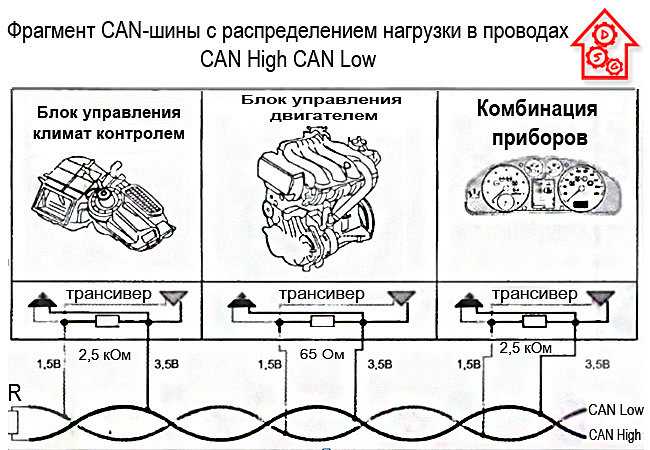
Расшифровка необработанных данных CAN
Необработанные данные CAN плохо читаются. Поэтому мы подготовили для вас руководство. Ознакомьтесь с руководством по как регистрировать необработанные сообщения CAN.
Шина CAN поддерживает основу для общения, но не более того. Протокол CAN не указывает, как обращаться с Сообщения больше 8 байт, или как декодировать данные RAW.
Чтобы указать, как данные передается между узлами CAN сети, набор стандартизированных протоколов пригодится. Есть несколько протоколов более высокого уровня, таких как; ОБД2, CANopen, CAN FD и SAE J1939.
ОБД2
OBD имеет функцию самодиагностики, которую в основном используют механики для анализа проблем с автомобилем и общего состояния автомобиля.
 здоровье автомобиля. OBD2 определяет коды неисправностей (DTC) и данные в реальном времени (об/мин, скорость и т. д.), которые
могут быть записаны через регистраторы OBD2.
здоровье автомобиля. OBD2 определяет коды неисправностей (DTC) и данные в реальном времени (об/мин, скорость и т. д.), которые
могут быть записаны через регистраторы OBD2.CANopen
CANopen обычно используется во встроенных приложениях управления, таких как промышленная автоматизация. на основе CAN, что означает, что регистратор данных шины CAN также может регистрировать данные CANopen.
МОЖЕТ ФД
CAN FD по сути представляет собой шину CAN с гибкой скоростью передачи данных и расширением классической линии передачи данных CAN. слой. По сравнению с классическим протоколом CAN, CAN FD увеличивает полезную нагрузку с 8 до 64 байт.
 Это также
позволяет более высокую скорость передачи данных, в зависимости от приемопередатчика CAN.
Это также
позволяет более высокую скорость передачи данных, в зависимости от приемопередатчика CAN.САЕ Дж1939
J1939 обычно используется в большегрузных автомобилях. J1939 такие параметры, как число оборотов в минуту и скорость, анализируются по подозрительному номеру параметра (SPN). После этого они группируются в группы параметров и классифицируются по номеру PG (PGN).
Высокоскоростная передача данных тарифные предложения DoIP диагностика, точнее примерно в 100 раз CAN диагностика.
История CAN-шины
Сеть зоны управления (шина CAN)
имеет богатую историю и прошла несколько этапов развития. Фактические этапы развития в течение нескольких лет могут
быть видно ниже.
Разработка шины CAN восходит к 1983 году, когда Bosch первоначально изобрел сеть диспетчерских зон, которая позже была кодифицирована в ISO 1189.8-1 стандарт.
Позднее в 1986 году протокол CAN был представлен Обществу автомобильных инженеров (SAE).
Intel была первой, кто представил микросхемы контроллера CAN в 1987 году, и вскоре к Intel присоединился Филлипс. после этого.
В 1991 году Bosch опубликовала CAN 2.0 (CAN 2.0A: 11 бит, 2.0B: 29 бит).
Шина CAN, как международный стандарт ISO 11898, была принята в 1993 году.
В 2003 году ISO 11898 стал серией стандартов.
В 2012 году Bosch выпустила CAN FD 1.0 — гибкую скорость передачи данных.
В 2015 году протокол CAN FD был стандартизирован в ISO 11898-1.
Наконец, физический уровень CAN со скоростью до 5 Мбит/с стандартизирован в ISO 1189.8-2, 2016 год.
В будущем шина CAN по-прежнему будет широко использоваться, но на нее будут влиять основные тенденции автомобильной промышленности, такие как; рост Интернета вещей и подключенных транспортных средств, влияние автономных транспортных средств, рост облачных вычислений, в потребность в расширенной функциональности автомобиля и многое другое.
Потребность в CAN FD возрастает, и многие эксперты предполагают, что он постепенно заменит классический протокол шины CAN. Оставаться
обновился, чтобы посмотреть, что происходит.
Оставаться
обновился, чтобы посмотреть, что происходит.
Ошибка 404 — Страница не найдена
Продукты
АППАРАТНОЕ ОБЕСПЕЧЕНИЕ
AutoPi TMU CM4 НОВЫЙ
AutoPi TMU SocketCAN
Облако АвтоПи
Решения
ПО БИЗНЕС-РЕШЕНИЮ Посмотреть все
Отслеживание активов
Проект больших данных 904:30
Вход без ключа
Интеграция с докером
Шлюз Интернета вещей 904:30
ПО ОТРАСЛИ
Еда и напитки
Лизинг автомобилей 904:30
Утилиты
Исследовательские проекты
Нефть, газ и горнодобывающая промышленность 904:30
Полиция и службы экстренного реагирования
Строительство
Транспорт
Электрические транспортные средства
Ресурсы
УЧИТЬСЯ
БОЛЬШЕ РЕСУРСОВ
Преимущества
О
КОМПАНИЯ АВТОПИ
О нас
Связаться 904:30
Карьера
Мой АвтоПи
Страница, которую вы искали, не найдена, если вы считаете, что это может быть ошибкой, пожалуйста Напишите нам.
