


Can Шина — Как программно управлять техникой?
С ростом популярности GPS контроля транспорта и сельскохозяйственной техники, возросла и популярность контроля с применением CAN-шины. Давайте разберем, почему использование CAN-шины — это действительно отличное решение.
Что такое кан шина?
Кан шина — это интерфейс, или система цифровой связи управления электрическими устройствами транспортного средства. Главной целью использования сети контроллеров является сбор, анализ и контроль данных, полученных со всех устройств, установленных на автомобиле. CAN шина была изобретена в 80х годах прошлого столетия известной немецкой компанией Robert Bosch GmbH. Использование CAN-шины — одно из лучших решений для современного бизнеса, деятельность которого тесно взаимосвязана с использованием коммерческого транспорта: грузовых автомобилей, автобусов, сельскохозяйственной техники и т.д. С помощью единой системы управления электрическими устройствами транспортного средства можно полноценно контролировать его состояние и оперативно предпринимать все необходимые меры по устранению выявленных неполадок. Дополнительным преимуществом технологии можно назвать подключение к CAN-шине бортовые ГЛОНАСС/GPS контроллеров и датчиков уровня топлива. GPS-мониторинг транспорта с применением CAN-шины — это эффективный метод получения всех параметров эксплуатации автомобиля.
Дополнительным преимуществом технологии можно назвать подключение к CAN-шине бортовые ГЛОНАСС/GPS контроллеров и датчиков уровня топлива. GPS-мониторинг транспорта с применением CAN-шины — это эффективный метод получения всех параметров эксплуатации автомобиля.
Получить консультацию
Can-шина принцип работы
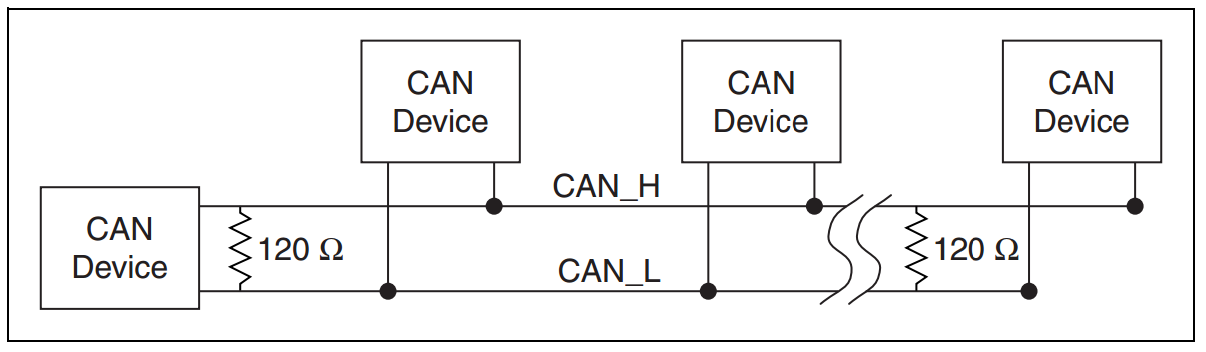
Чтобы понять, как работает CAN шина, можно представить эту технологию в виде единой сети, объединяющей датчики и прочие исполнительные элементы конкретного автомобиля. Сама шина представлена витой парой, имеющей 2 отдельные линии — CAN-high, CAN-low. По шине от одного к другому блоку бортового компьютера передаются данные со скоростью 1 Мбит в секунду. Напряжение к каждому элементу передается от бортовой сети. Однако от стандартной электропроводки шина отличается тем, что она соединяет элементы параллельно. Это значительно упрощает прокладку проводки и позволяет обойтись меньшим количеством проводов. За счет этого единая система мониторинга показателей характеризуется высокой надежностью.
Контроллер фиксирует все ошибки и неисправности. Они обрабатываются, а узел, в котором были идентифицированы ошибки по умолчанию отключается от общего соединения.
Если анализировать ключевые характеристики современных CAN-шин, можно выделить следующие:
- Тип провода: витая пара проводов и шлейф считаются бюджетными вариантами, которые демонстрируют низкую скорость передачи данных. Что касается проводов из оптоволокна, они обеспечивают максимальную скорость передачи данных. К другим преимуществам варианта можно отнести высокую надежность и большой, если сравнивать с витой парой и шлейфом, срок эксплуатации.
- Тип идентификатора: условно все CAN-шины по типу идентификатора можно разделить на CAN2 0A и CAN2 0B. Маркировку CAN2 0A имеют шины, функционирующие в формате 11 бит. Однако такая система не может выявить ошибки на сигналы от модулей, которые работают с 29 бит. CAN2 0B, в отличие от предыдущего варианта, все данные о выявленных ошибках могут передаваться на микропроцессорные устройства при обнаружении идентификатора на 29 бит.
Вид шины также является важной характеристикой, в соответствии с который интерфейсы классифицируются следующим образом:
- Комфорт: цифровой интерфейс предназначен для соединения всех устройств, в том числе и дополнительных, например, подогрева сидений, элекрорегулировки зеркал и прочее.
- Для силового агрегата: подключается к транспортному средству для обеспечения быстрой связи между между управляющими системами по дополнительному каналу.
- Информационно-командные интерфейсы: используются для обеспечения бесперебойной связи между узлами, которые задействованы в обслуживании транспортного средства.
Заказать бесплатный расчёт
Подключение к can шине
Подключение к CAN-шине автомобиля позволяет эффективно решить целый комплекс задач:
- Контролировать уровень топлива и его реальный расход.
- Получать данные о состоянии педалей авто.
- Выявлять, какого стиля придерживается водитель.
- Следить за состояние системы безопасности транспортного средства.
- Контролировать температуру двигателя и охлаждающей жидкости.
- Получать информацию об уровне нагрузки на ось авто.
На сельскохозяйственных, транспортных, коммунальных, строительных предприятиях также используются интерфейсы для централизованного отслеживания рабочих параметров авто. К примеру, подключение к CAN-шине трактора позволит получать информацию по следующим параметрам:
- Обороты двигателя;
- Актуальный момент двигателя;
- Часовой расход топлива;
- Мгновенный путевой расход топлива.
Подключение к CAN-шине комбайна позволяет получить не только показатели работы двигателя, но и время включения и работы жатки, молотьбу, загрузку бункера и т.д.
Плюсы и минусы CAN-шин
У интерфейса есть свои преимущества, и недостатки. Плюсы CAN-шины:
- Вы можете самостоятельно выбрать важные показатели и настроить их контроль;
- Простая установка;
- Быстрый обмен информацией;
- Защита от несанкционированного доступа.
Возможные минусы СAN-шин:
- Бывают ограничения объемов передаваемых данных;
- Если используется протокол высшего уровня, возможно возникновение проблем, связанных с отсутствием стандартизации кодировки передаваемых данных.
Установка CAN-шины на технику
Установка CAN шины на технику, независимо от ее предназначения, нужно доверять настоящим профессионалам своего дела. Специалисты нашей компании microtronic.com.ua имеют большой опыт работы с сельскохозяйственным и грузовым транспортом, поэтому окажут услуги по быстрой и правильной установке CAN-шины. По всем интересующим вопросам вы можете обратиться по указанным на сайте контактным данным к нашим менеджерам.
- Prev
- Next
Особенности цифровой can шины, зачем она нужна в автомобиле, какие функции исполняет
Современные автомобили всё больше подстраиваются под конкретные потребности людей. В них появилось много дополнительных систем и функций, которые связаны с необходимостью передачи определённой информации. Если бы к каждой такой системе пришлось подключать отдельные провода, как это было раньше, то весь салон превратился бы в сплошную паутину и водителю сложно было бы управлять машиной из-за большого количества проводов. Но решение этой проблемы нашлось – это установка Can-шины. Какая её роль водитель смогут узнать сейчас.
Если бы к каждой такой системе пришлось подключать отдельные провода, как это было раньше, то весь салон превратился бы в сплошную паутину и водителю сложно было бы управлять машиной из-за большого количества проводов. Но решение этой проблемы нашлось – это установка Can-шины. Какая её роль водитель смогут узнать сейчас.
Can шина – имеет ли она что-то общее с обычными шинами и для чего нужна
Содержание
- 1 Can шина – имеет ли она что-то общее с обычными шинами и для чего нужна
- 2 Когда была разработана цифровая CAN шина и какое её назначение
- 3 Can шина – параметры скорости и особенности передачи данных
- 4 Могут ли возникать проблемы в работе кан шины
- 5 Какие системы входят в современную Can шину автомобиля
- 6 CAN шина, как подключается автосигнализация к цифровой шине
Услышав такое определение, как «CAN шина», неопытный водитель подумает что это ещё один вид автомобильной резины. Но на самом деле, к обычным шинам это устройство не имеет никакого отношения.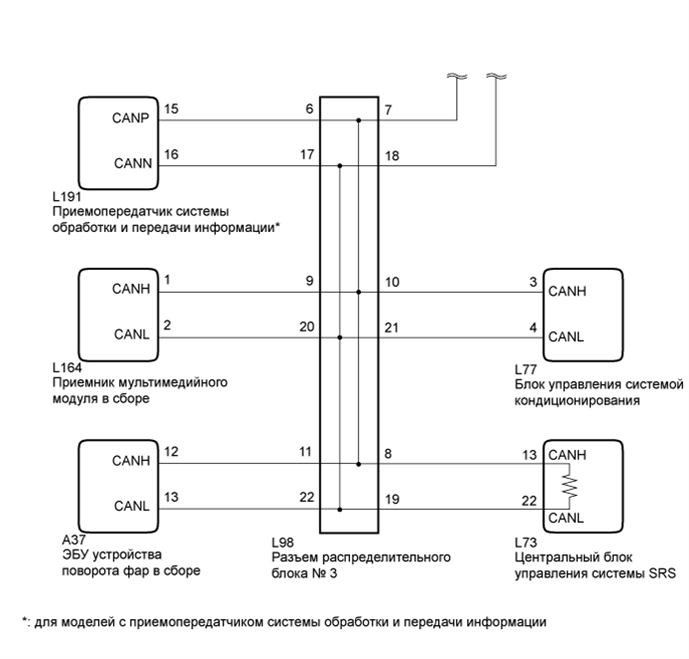 Это устройство создавалось для того, чтобы не было необходимости устанавливать в машине кучу проводов, ведь управление всеми системами машин должно вестись из одного места. Can шина даёт возможность сделать салон автомобиля комфортным для водителя и пассажиров, ведь при её наличии не будет большого количества проводов, позволяет вести управление всеми системами машины и подключать в удобный способ дополнительное оборудование – трекеры, сигнализации, маяки, секретки и другое. В машина старого образца ещё нет такого приспособления, это доставляет много неудобств. Цифровая шина лучше справляется с поставленными на неё задачами, а стандартная система – с кучей проводов, является сложной и неудобной.
Это устройство создавалось для того, чтобы не было необходимости устанавливать в машине кучу проводов, ведь управление всеми системами машин должно вестись из одного места. Can шина даёт возможность сделать салон автомобиля комфортным для водителя и пассажиров, ведь при её наличии не будет большого количества проводов, позволяет вести управление всеми системами машины и подключать в удобный способ дополнительное оборудование – трекеры, сигнализации, маяки, секретки и другое. В машина старого образца ещё нет такого приспособления, это доставляет много неудобств. Цифровая шина лучше справляется с поставленными на неё задачами, а стандартная система – с кучей проводов, является сложной и неудобной.
Когда была разработана цифровая CAN шина и какое её назначение
Разработка цифровой шины началась ещё в двадцатом веке. Ответственность за этот проект взяли на себя две компании – INTEL и BOSCH.После некоторых совместных усилий, специалистами этих компаний был разработан сетевой индикатор – CAN.
Если к CAN шине подключить автосигнализацию, то возможности охранной системы увеличатся, а прямым назначением этой автомобильной системы можно назвать:
- упрощение механизма подключения и работы дополнительных систем автомобиля;
- возможность подключить к системе автомобиля любые устройства;
- возможность одновременно принимать и передавать цифровую информацию из нескольких источников;
- снижает влияние внешних электромагнитных полей на работоспособность основных и дополнительных систем автомобиля;
- ускоряет процесс передачи данных к необходимым устройствам и системам машины.
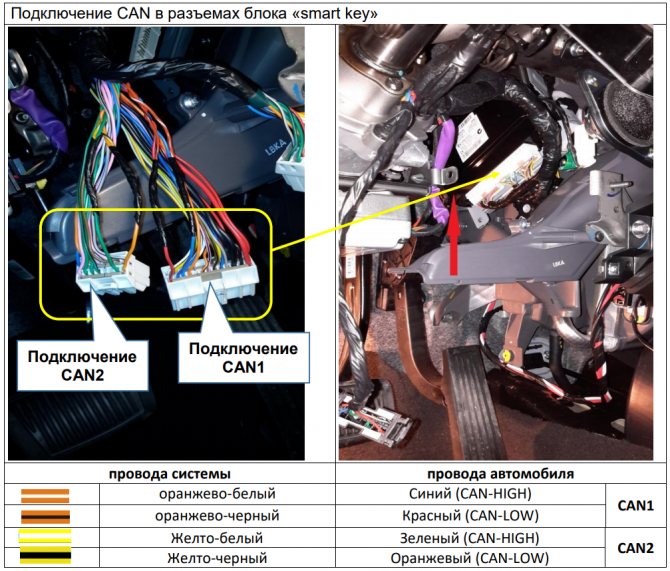
Чтобы подключиться к CAN шине необходимо найти в системе проводов оранжевый, он должен быть толстым. Именно к нему нужно подключаться, чтобы наладить взаимодействие с цифровой шиной. Эта система работает как анализатор и распространитель информации, благодаря ей обеспечивается качественная и регулярная работа всех систем автомобиля.
Именно к нему нужно подключаться, чтобы наладить взаимодействие с цифровой шиной. Эта система работает как анализатор и распространитель информации, благодаря ей обеспечивается качественная и регулярная работа всех систем автомобиля.
Can шина – параметры скорости и особенности передачи данных
Принцип работы, по которому действует анализатор CAN шины заключается в том, что ему необходимо быстро переработать поступившую информацию и отправить её обратно в качестве сигнала для определённой системы. В каждом отдельном случае скорость передачи данных для систем автомобиля бывает разной. Основные параметры скорости выглядят таким образом:
- общая скорость передачи информационных потоков по цифровой шине –1 мб/с;
- скорость передачи переработанной информации между блоками управления автомобиля – 500 кб/с;
- скорость поступления информации к системе «Комфорт» — 100 кб/с.
Если к цифровой шине подключена автосигнализация, то информация от неё будет поступать максимально быстро, а заданные человеком команды, при помощи брелока, будут исполнены точно и вовремя. Анализатор системы работает без перебоев и поэтому работа всех систем машины будет постоянно исправной.
Анализатор системы работает без перебоев и поэтому работа всех систем машины будет постоянно исправной.
Цифровая шина – это целая сеть контролёров, которые объединились в одно компактное устройство и имеют возможность быстро получать или передавать информацию, запуская или отключая определённые системы. Последовательный режим передачи данных делает работу системы более слаженной и корректной. CAN шина – это механизм, который имеет тип доступа Collision Resolving и при установке дополнительного оборудования необходимо учитывать этот факт.
Могут ли возникать проблемы в работе кан шины
Кан шина или цифровая шина работает со многими системами одновременно и постоянно занимается передачей данных. Но как и в каждой системе, в механизме CAN шины могут происходить сбои и от этого анализатор информации будет работать крайне некорректно. Проблемы с кан шиной могут возникать из-за следующих ситуаций:
- произошёл обрыв проводников системы;
- случилось замыкание на массу или на батарею;
- замыкание систем CAN-High или CAN-Low – белее или менее скоростного режима работы системы цифровой шины;
- при слишком низком напряжении системы или полной разрядке аккумулятора;
- если отсутствуют резиновые перемычки;
- из-за неисправной катушки зажигания и других проблем похожего характера.
При выявлении неисправности системы необходимо искать причину этого, учитывая что она может скрываться в дополнительном оборудовании, которое устанавливалось – автосигнализация, датчики и другие внешние системы. Поиски проблемы должны производиться следующим образом:
- проверить работу системы в целом и запросить банк неисправностей;
- проверка напряжения и сопротивления проводников;
- проверка сопротивления резисторных перемычек.
Если с цифровой шиной возникают проблемы и анализатор не может продолжать корректную работу не стоит пытаться самостоятельно решить эту проблему. Для грамотной диагностики и произведения необходимых действий необходима поддержка специалиста в этой области.
Какие системы входят в современную Can шину автомобиля
Все знают что кан шина – это анализатор информации и доступное устройство для передачи команд к основным и дополнительным системам транспортного средства, дополнительному оборудованию – автосигнализация, датчики, трекеры.
- цифровая шина силового агрегата;
- электронные блоки управления двигателем и КПП;
- блоки управления АБС и подушками безопасности;
- блоки для управления ТНВД и рулевым механизмом;
- электронный замок зажигания и центральный монтажный блок;
- датчик для определения угла поворота руля;
- специальная цифровая шина для системы «Комфорт»;
- электронные блоки дверей и контроля парковки;
- блок управления стеклоочистителями и контроля давления в шинах;
- навигационная и информационная система;
- звуковая система.
В этот список не ходят внешние системы, которые можно подключать к цифровой шине. На месте таких может быть автосигнализация или дополнительное оборудования подобного типа. Получать информацию с кан шины и следить за тем, как работает анализатор можно при помощи компьютера. Для этого необходима установка дополнительного адаптера. Если к кан-шине подключена сигнализация и дополнительно маяк, то можно управлять некоторыми системами автомобиля, используя для этого мобильный телефон.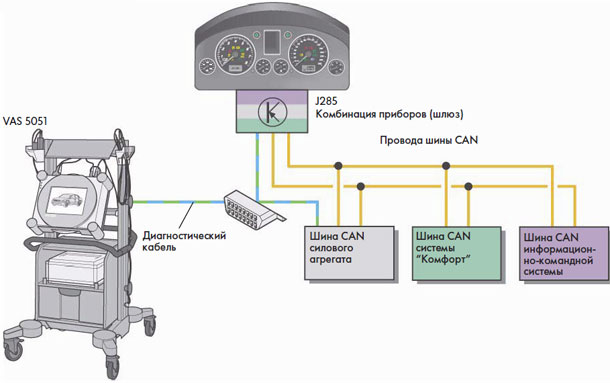
Не каждая сигнализация имеет возможность подключения к цифровой шине. Если владелец автомобиля хочет, чтобы его автосигнализация имела дополнительный возможности, а он постоянно мог управлять системами своего автомобиля на расстоянии, стоит задуматься о покупке более дорогого и современного варианта охранной системы. Такая сигнализация легко подключается к проводу кан шины и работает очень эффективно.
CAN шина, как подключается автосигнализация к цифровой шине
Анализатор цифровой шины справляется не только со внутренними системами и устройствами автомобиля. Подключение внешних элементов –сигнализация, датчики, другие устройства, добавляет цифровому устройству больше нагрузки, но при этом его продуктивность остаётся прежней. Автосигнализация, которая имеет адаптер для подключения к цифровой шине устанавливается по стандартной схеме, а для того, чтобы подключиться к CAN необходимо пройти несколько простых шагов:
- Автосигнализация по стандартной схеме подключается ко всем точкам автомобиля.

- Владелец транспортного средства ищет оранжевый, толстый провод – он ведёт к цифровой шине.
- Адаптер сигнализации подключается к проводу цифровой шины автомобиля.
- Производятся необходимые закрепляющие действия –установка системы в надёжном месте, изоляция проводов, проверка правильности произведённого процесса.
- Настраиваются каналы для работы с системой, задаётся функциональный ряд.
Возможности современной цифровой шины велики, ведь виток из двух проводов объединяет в себе доступ до всех основных и дополнительных систем автомобиля. Это помогает избежать наличия большого количества проводов в салоне и упрощает работу всей системы. Цифровая шина работает по типу компьютера, а это в современном мире очень актуально и удобно.
Кан шина принцип работы
CAN шина, что же это такое? Много информации читал, но нихрена не понимал. А тут вот нашлось простое и доходчивое объяснение, которое поймёт и ребёнок. А может и не поймет…
А тут вот нашлось простое и доходчивое объяснение, которое поймёт и ребёнок. А может и не поймет…
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.
Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины.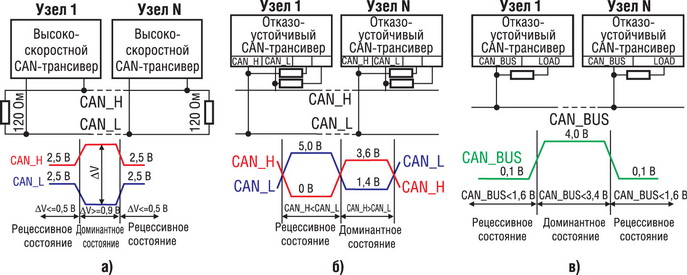 Работает на скорости 33,3 кбит/сек.
Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN
Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:
Вот такие пироги. Наткнулся тут : quantexlab
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).
Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:
Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:
Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.
«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.
Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.
Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.
Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.
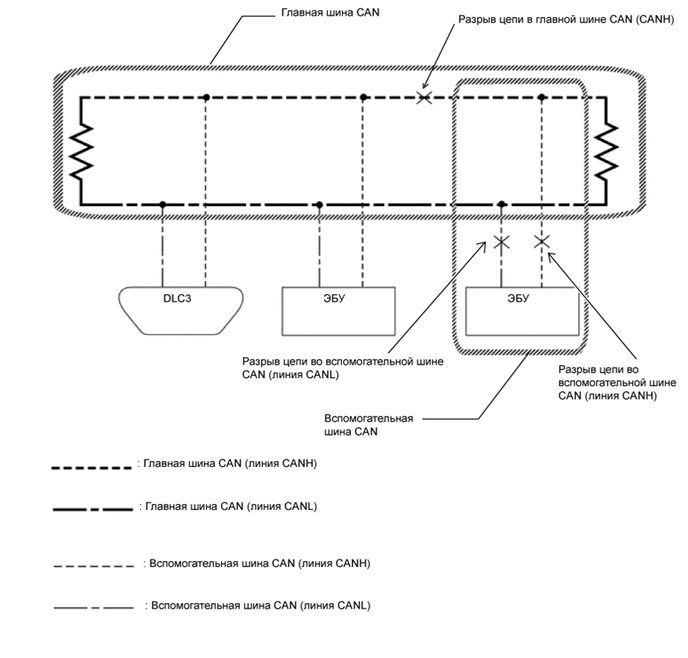
Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Одним из подобных источников, который, как нам показалось, вполне подходящим образом иллюстрирует принципы работы CAN-шины, стал видеоролик-презентация учебного продукта CANBASIC компании Igendi Engineering (http://canbasic. com).
com).
Также можете прочитать вторую нашу переводную статью Введение в CAN.
Добро пожаловать на презентацию нового продукта CANBASIC, учебной системы (платы), посвященной вопросу функционирования шины КАН (CAN).
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.
Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.
Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.
Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC
В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
На тренировочной доске CANBASIC вы можете увидеть маршрутизацию (расположение) трех сигналов: «Питание», «CAN-Hi» и «земли», соединяющихся в контрольном модуле.
В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.
Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.
Провода шины используются для передачи множества данных. Как это работает ?
Как работает CAN-шина
Эти данные передаются последовательно. Вот пример.
Человек с лампой, передатчик, хочет отправить какую-то информацию человеку с телескопом, получателю (приемнику). Он хочет передать данные.
Он хочет передать данные.
Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.
Это выглядит так:
Спустя 80 секунд:
Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.
Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.
Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.
Чтобы показать полное CAN-сообщение разрешение осциллографа уменьшается.
В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.
Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
Чтобы объяснить другие части CAN-сообщения мы раскрашиваем CAN-кадр и прикрепляем на него подписи с описанием.
Каждая раскрашенная часть CAN-сообщения соответствует полю ввода того же цвета. Область, отмеченная красным, содержит информацию о пользовательских данных, которая может быть задана в формате битов, полубайтов или шестнадцатиричном формате.
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
Синяя область позволяет задать CAN-сообщение для удаленного запроса. Это означает, что будет ожидаться ответ от другого CAN-узла. (Разработчики системы сами рекомендуют не пользоваться удаленными запросами по ряду причин приводящих к глюкам системы, но об этом будет другая статья. )
)
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).
Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.
Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.
Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.
С помощью полей ввода могут быть заданы все данные КАН-кадра и поэтому каждое КАН-сообщение может быть отправлено.
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.
Текст описания показывает, что сигнал поворота будет управляться с помощью идентификатора «2С1» и бит данных 0 и 1. Все биты данных сбрасываются на 0.
Все биты данных сбрасываются на 0.
Идентификатор установлен в значение «»2С1». Для активации сигнала поворотов бит данных должен быть установлен с 0 на 1.
В режиме «в салоне» вы можете управлять всем модулем с помощью простых щелчков мыши. Данные CAN устанавливаются автоматически в соответствии с желаемым действием.
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.
С отключением ближнего света противотуманные фары также отключаются. Логика управления световой системой CANBASIC соответствует автомобилям марки Volkswagen. Особенности зажигания и «возвращения домой» также включены.
С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.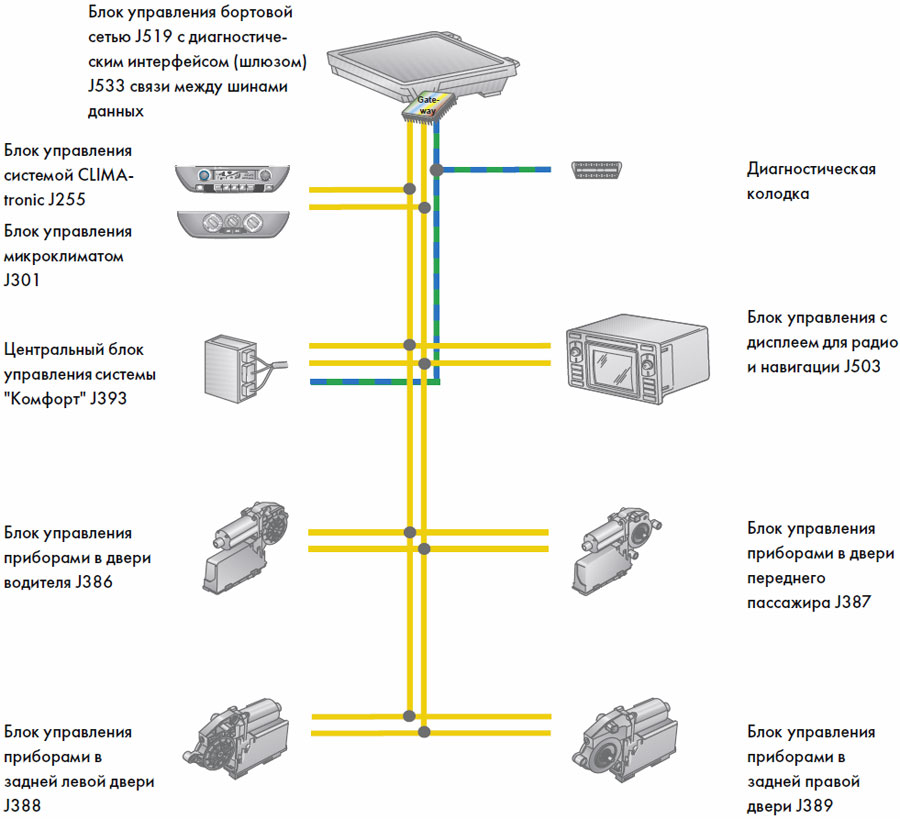
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.
Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.
Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.
Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.
CAN FD Объяснение – CSS Electronics
Вам нужно простое практическое введение в CAN FD?
В этом руководстве мы представляем CAN FD (CAN Гибкая скорость передачи данных) — вкл. Кадры CAN FD, накладные расходы и эффективность, примеры приложений и варианты использования журналов.
Примечание: CAN FD может показаться сложным.
Прочтите ниже, чтобы полностью понять CAN FD.
Вы также можете посмотреть наше вводное видео о CAN FD выше или получить PDF-файл.
В этой статье
- Почему CAN FD?
- Что такое CAN FD?
- Как работает CAN FD?
- Калькулятор CAN FD
- Примеры использования
- Регистрация данных CAN FD
- Внешний вид
Автор: Мартин Фальх
(обновлено в марте 2022 г. )
)
Почему CAN FD?
Протокол CAN существует с 1986 года и пользуется популярностью: Практически любая машина, которая перемещает , сегодня использует CAN — будь то автомобили, грузовики, лодки, самолеты или роботы.
Но с появлением современных технологий «Классический» протокол CAN (официальный термин, используемый в ISO 11898-1:2015) оказывается под давлением:
- Расширение функциональных возможностей транспортных средств приводит к резкому увеличению объема данных
- Сети все больше ограничиваются пропускной способностью 1 Мбит/с
- Чтобы справиться с ситуацией, OEM-производители создают сложные и дорогостоящие обходные пути
В частности, классический CAN борется со значительными накладными расходами (> 50%), поскольку каждый кадр данных CAN может содержать только 8 байтов данных. Кроме того, скорость сети ограничена 1 Мбит/с, что ограничивает реализацию функций по производству данных.
CAN FD решает эти проблемы , делая его перспективным.
Что такое CAN FD?
Протокол CAN FD был предварительно разработан компанией Bosch (совместно с отраслевыми экспертами) и выпущен в 2012 г. Он был улучшен путем стандартизации и теперь соответствует стандарту ISO 1189.8-1:2015. Исходная версия Bosch CAN FD (не ISO CAN FD) несовместима с ISO CAN FD.
CAN FD предлагает четыре основных преимущества:
#1 Увеличенная длина
CAN FD поддерживает до 64 байта данных на кадр данных против 8 байтов данных для классического CAN. Это уменьшает накладные расходы протокола и приводит к повышению эффективности протокола.
#2 Повышенная скорость
CAN FD поддерживает два битрейта: номинальный (арбитражный) битрейт, ограниченный 1 Мбит/с, как в классическом CAN, и битрейт данных, который зависит от топологии сети/трансиверов.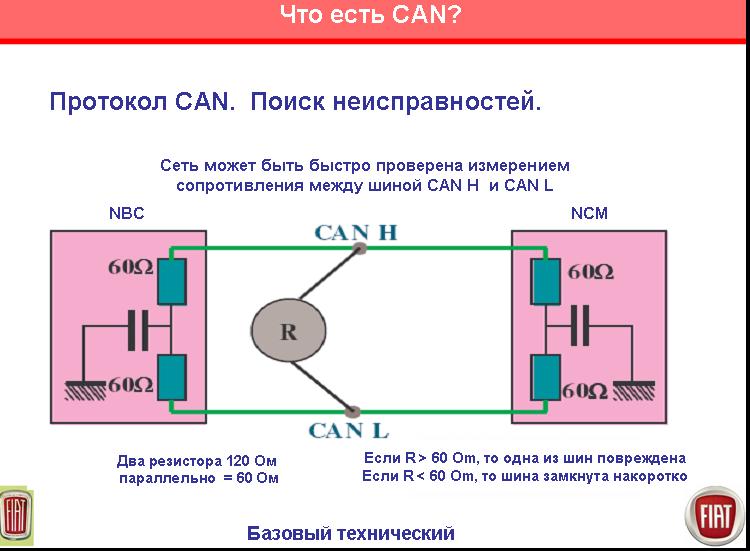 На практике достигаются скорости передачи данных до 5 Мбит/с.
На практике достигаются скорости передачи данных до 5 Мбит/с.
#3 Лучшая надежность
CAN FD использует улучшенную проверку циклическим избыточным кодом (CRC) и «защищенный счетчик заполняющих битов», которые снижают риск необнаруженных ошибок . Это напр. имеет жизненно важное значение в приложениях, критически важных с точки зрения безопасности, таких как транспортные средства и промышленная автоматизация.
#4 Плавный переход
CAN FD и Classical CAN только ЭБУ могут быть смешаны при определенных условиях. Это позволяет постепенно внедрять узлы CAN FD, значительно снижая затраты и сложность для OEM-производителей.
На практике CAN FD может улучшить пропускную способность сети на 3-8x по сравнению с классической CAN, создавая простое решение для увеличения объема данных.
Как работает CAN FD?
Итак, CAN FD кажется довольно простым: Ускорить передачу данных и упаковать больше данных в каждое сообщение, верно?
Однако на практике все не так просто.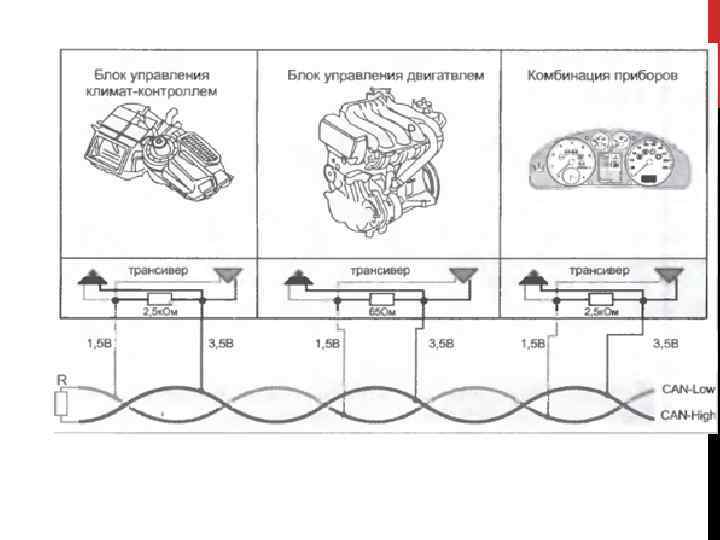 Ниже мы обрисовываем основные проблемы, которые должно было решить решение CAN FD.
Ниже мы обрисовываем основные проблемы, которые должно было решить решение CAN FD.
Две ключевые проблемы
Перед просмотром кадра данных CAN FD важно понять две основные части классического CAN, которые мы хотим поддерживать:
#1 Избегайте критических задержек сообщений
Почему бы просто не упаковать кадры классического CAN с 64 байтами данных ?
Это уменьшит накладные расходы и упростит интерпретацию сообщений. Однако, если скорость передачи не изменится, это также заблокирует шину CAN на более длительное время, что может привести к задержке критически важных кадров данных с более высоким приоритетом.
#2 Сохраняйте практическую длину проводов CAN
Таким образом, для отправки большего количества данных в одном сообщении требуется большая скорость.
Но почему бы не ускорить все сообщение CAN (а не только фазу данных)?
Это происходит из-за «арбитража»: если 2+ узла передают данные одновременно, арбитраж определяет, какой узел имеет приоритет.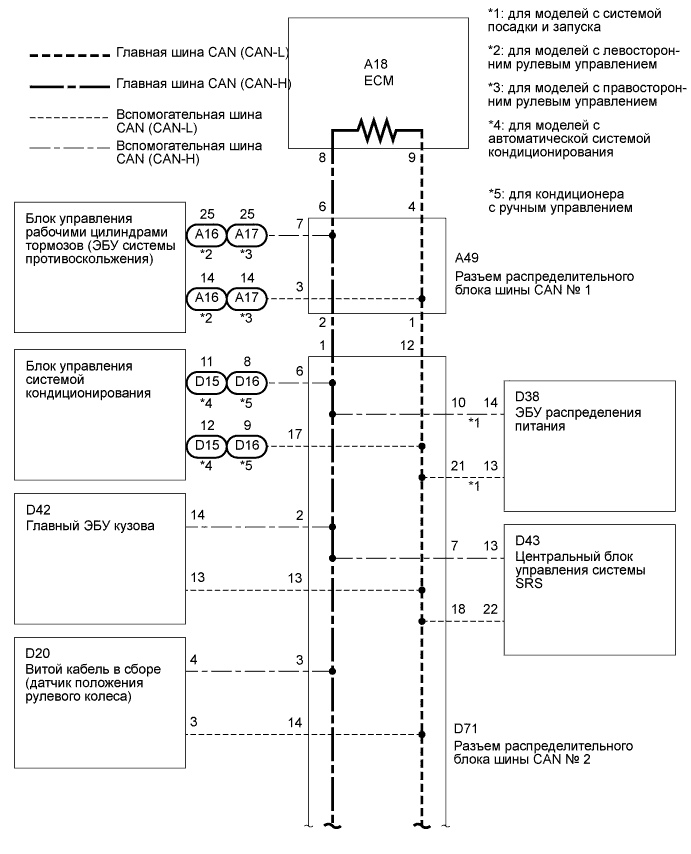 «Победитель» продолжает передачу (без задержек), в то время как остальные узлы «отстаивают» во время передачи данных.
«Победитель» продолжает передачу (без задержек), в то время как остальные узлы «отстаивают» во время передачи данных.
Во время арбитража «время передачи битов» обеспечивает достаточную задержку между каждым битом, чтобы каждый узел в сети мог отреагировать. Чтобы быть уверенным, что каждый узел будет достигнут в течение битового времени, сеть CAN, работающая со скоростью 1 Мбит/с, должна иметь максимальную длину 40 метров (на практике 25 метров). Ускорение арбитражного процесса сократит максимальную длину до неприемлемого уровня.
С другой стороны, после арбитража остается «пустая магистраль» — включение высокой скорости при передаче данных (когда шинопроводами управляет только один узел). Перед слотом ACK, когда несколько узлов подтверждают правильный прием кадра данных, скорость должна быть снижена до номинального значения.
Короче, надо найти способ только увеличить скорость при передаче данных.
Решение: Фрейм CAN FD
Протокол CAN FD вводит скорректированный кадр данных CAN, позволяющий использовать дополнительные байты данных и гибкие скорости передачи данных.
Ниже мы сравниваем 11-битный кадр Classical CAN с 11-битным фреймом CAN FD (также поддерживается 29-битный): RRS: Запрос удаленной передачи (RTR) используется в классической CAN для идентификации кадров данных и соответствующих удаленных кадров. В CAN FD удаленные фреймы вообще не поддерживаются — всегда доминирует подстановка удаленного запроса (RRS) (0).
r0 по сравнению с FDF: В классическом CAN r0 является зарезервированным и доминирующим (0). В CAN FD он называется FDF и рецессивный (1).
После бита r0/FDF протокол CAN FD добавляет «3 новых бита». Обратите внимание, что узлы, которые не поддерживают CAN FD, создают кадр ошибки после бита FDF.
res: Этот новый зарезервированный бит играет ту же роль, что и r0, т. е. в будущем он может быть установлен как рецессивный (1) для обозначения нового протокола.
BRS: Переключатель скорости передачи данных (BRS) может быть доминирующим (0), что означает, что кадр данных CAN FD отправляется с арбитражной скоростью (т. е. до макс. 1 Мбит/с). Установка его на рецессивный (1) означает, что оставшаяся часть фрейма данных отправляется с более высокой скоростью передачи данных (до 5 бит/с).
Мбит/с).
е. до макс. 1 Мбит/с). Установка его на рецессивный (1) означает, что оставшаяся часть фрейма данных отправляется с более высокой скоростью передачи данных (до 5 бит/с).
Мбит/с).
ESI: Бит индикатора состояния ошибки (ESI) по умолчанию является доминирующим (0), т. е. «активна ошибка». Если передатчик становится «пассивным к ошибкам», он будет рецессивным (1), чтобы указать, что он находится в пассивном к ошибкам режиме.
DLC: Как и в классическом CAN, CAN FD DLC состоит из 4 бит и обозначает количество байтов данных в кадре. В приведенной выше таблице показано, как два протокола последовательно используют DLC до 8 байтов данных. Для поддержки 4-битного DLC CAN FD использует оставшиеся 7 значений из 9до 15 для обозначения количества используемых байтов данных (12, 16, 20, 24, 32, 48, 64).
SBC: Счетчик битов заполнения (SBC) предшествует CRC и состоит из 3 битов с кодировкой Грея и бита четности. Следующий фиксированный бит заполнения можно рассматривать как второй бит четности. SBC добавлен для повышения надежности связи.
SBC добавлен для повышения надежности связи.
CRC: Проверка циклическим избыточным кодом (CRC) является 15-битной в классическом CAN, а в CAN FD — 17-битной (до 16 байтов данных) или 21-битной (для 20-64 байтов данных). В классическом CAN в CRC может быть от 0 до 3 битов заполнения, в то время как в CAN FD всегда есть четыре фиксированных бита заполнения для повышения надежности связи.
ACK: Фаза данных (также известная как полезная нагрузка) кадра данных CAN FD останавливается на бите ACK, который также отмечает конец потенциально увеличенной скорости передачи данных.
Накладные расходы и эффективность передачи данных CAN FD по сравнению с CAN
Как видно, дополнительные функциональные возможности CAN FD добавляют много дополнительных битов по сравнению с классическим CAN — как это может привести к уменьшению накладных расходов на и ?
Ответ заключается в том, что это не так. См. приведенную ниже визуализацию классического CAN и CAN FD для 3 байтов данных. На самом деле эффективность CAN FD не превышает классического CAN до пересечения 8 байтов данных. Однако при переходе к 64 байтам данных эффективность может возрасти с ~ 50% до ~ 9 байт.0% (подробнее об этом ниже).
На самом деле эффективность CAN FD не превышает классического CAN до пересечения 8 байтов данных. Однако при переходе к 64 байтам данных эффективность может возрасти с ~ 50% до ~ 9 байт.0% (подробнее об этом ниже).
Потребность в скорости: включение переключения скорости передачи данных
Как уже упоминалось, отправка 64 байтов данных на обычной скорости заблокирует шину CAN, что снизит производительность в реальном времени.
Чтобы решить эту проблему, можно включить переключение скорости передачи , чтобы разрешить отправку полезной нагрузки с более высокой скоростью по сравнению с арбитражной скоростью (например, 5 Мбит/с против 1 Мбит/с). Выше мы иллюстративно визуализируем эффект для сценариев с 3 байтами данных и 64 байтами данных.
Обратите внимание, что более высокая скорость применяется к разделу кадра данных, начиная с в бите BRS и заканчивается разделителем CRC.
Кроме того, большинство транспортных средств сегодня используют скорость 0,25–0,5 Мбит/с, а это означает, что при скорости 5 Мбит/с CAN FD в 10 раз превысит скорость передачи полезной нагрузки.
Как упоминалось ранее, узлы Classical CAN и CAN FD могут использоваться одновременно при определенных условиях. Это позволяет осуществлять пошаговый переход на CAN FD вместо того, чтобы переключать каждый ЭБУ за один раз.
Существует два сценария:
100% Система CAN FD: Здесь контроллеры CAN FD могут свободно смешивать кадры данных Classic CAN и CAN FD.
Некоторые узлы являются устаревшими классическими CAN: Здесь контроллеры CAN FD могут переключиться на классическую связь CAN, чтобы избежать реакций кадров ошибок от классических узлов CAN. Кроме того, во время, например. ЭБУ мигает, классические узлы CAN могут быть отключены, чтобы разрешить временный переход на связь CAN FD.
Сбивающим с толку аспектом CAN FD является максимальная скорость передачи данных на этапе полезной нагрузки, поскольку в разных статьях упоминаются разные уровни.
Некоторые утверждают, что практические приложения обеспечивают скорость до 8 Мбит/с и теоретически 15 Мбит/с. Другие заявляют до 12 Мбит/с. Кроме того, Daimler заявляет, что скорость выше 5 Мбит / с сомнительна — как из-за отсутствия стандарта для этого, так и из-за того, что ожидается, что недорогой автомобильный Ethernet (10 BASE-T1) ограничит спрос на CAN FD на более высокой скорости.
Другие заявляют до 12 Мбит/с. Кроме того, Daimler заявляет, что скорость выше 5 Мбит / с сомнительна — как из-за отсутствия стандарта для этого, так и из-за того, что ожидается, что недорогой автомобильный Ethernet (10 BASE-T1) ограничит спрос на CAN FD на более высокой скорости.
Так что правильно?
Это зависит. Глядя на ISO 11898-2 (стандарт микросхем приемопередатчика), он определяет два набора параметров симметрии. Рекомендуется использовать трансиверы с улучшенными параметрами симметрии, часто рекламируемые как трансиверы 5 Мбит/с. Достижимая скорость передачи данных на этапе передачи данных зависит от многих факторов. Одним из наиболее важных является желаемый температурный диапазон. Прошивка ЭБУ не требует поддержки низких
температуры. Это означает, что для перепрошивки ЭБУ можно подняться до 12 Мбит/с. Еще одно важное ограничение скорости передачи данных связано с выбранной топологией. Топология «шина» с очень короткими ответвлениями обеспечивает значительно более высокие скорости передачи по сравнению с гибридными топологиями с длинными ответвлениями или даже звездами. Большинство многоабонентских шинных сетей ограничены скоростью 2 Мбит/с в диапазоне температур от -40 до +125°С.
град С. CiA предоставляет соответствующие эмпирические правила в рекомендациях по проектированию сети CiA 601-3. Сюда входят рекомендации по установке точек выборки на этапе данных.
Большинство многоабонентских шинных сетей ограничены скоростью 2 Мбит/с в диапазоне температур от -40 до +125°С.
град С. CiA предоставляет соответствующие эмпирические правила в рекомендациях по проектированию сети CiA 601-3. Сюда входят рекомендации по установке точек выборки на этапе данных.
Для получения более подробной технической информации о CAN FD мы можем порекомендовать следующие учебники и руководства:
- CAN FD Wiki: содержит, например. хорошее сравнение CAN FD и CAN (классическая шина CAN)
- CiA CAN FD: хорошее введение в CAN FD от CAN in Automation
- Регистратор CAN FD: наше введение в регистрацию данных CAN FD, вкл. практические примеры
Калькулятор CAN FD: Эффективность и скорость передачи
Для подробного понимания CAN FD эффективность и средний битрейт , мы рекомендуем проверить наш калькулятор CAN FD.
Калькулятор CAN FD
Примеры: приложения CAN FD
Короче говоря, CAN FD позволяет системе обрабатывать больше данных с большей скоростью.
Это жизненно важно для ряда все более актуальных вариантов использования:
Электромобили
Электромобили и гибриды используют новые концепции трансмиссии, которые требуют гораздо более высоких скоростей передачи данных. Дополнительная сложность возникает из-за новых блоков управления, связанных с инвертором DC/DC, аккумулятором, зарядным устройством, расширителем диапазона и т. д. Ожидается, что к 2025 году требуемая скорость передачи данных превысит CAN — и с резким ростом электромобилей, это может быть острием развертывания CAN FD.
ЭБУ мигает
Программное обеспечение автомобиля становится все более сложным. Таким образом, выполнение обновлений ECU через, например. порт OBD2 сегодня может занять несколько часов. С CAN FD такие процессы можно ускорить более чем в 4 раза. Этот вариант использования был одним из первых драйверов спроса на CAN FD со стороны OEM-производителей автомобилей.
Робототехника
В некоторых приложениях используется синхронизация по времени. роботы-манипуляторы с несколькими осями. Такие устройства часто используют CANopen и требуют, чтобы каждый контроллер отправлял несколько кадров CAN (PDO) с синхронизацией по времени (без прерывания кадрами с более высоким приоритетом). При переходе на CAN FD данные могут быть отправлены за один раз.
кадр для эффективности.
роботы-манипуляторы с несколькими осями. Такие устройства часто используют CANopen и требуют, чтобы каждый контроллер отправлял несколько кадров CAN (PDO) с синхронизацией по времени (без прерывания кадрами с более высоким приоритетом). При переходе на CAN FD данные могут быть отправлены за один раз.
кадр для эффективности.
ADAS и безопасное вождение
Расширенные системы помощи водителю (ADAS) все чаще внедряются в легковые и коммерческие автомобили. Это увеличивает нагрузку на шину Classical CAN, но ADAS является ключом к повышению безопасности. Здесь CAN FD станет ключом к повышению безопасности вождения в ближайшем будущем.
Грузовики и автобусы
Грузовики и автобусы используют длинные шины CAN (10-20 метров). В результате они полагаются на низкие скорости передачи данных (250 кбит/с или 500 кбит/с в соответствии с J19).39-14). Ожидается, что грядущий протокол J1939 FD позволит значительно улучшить характеристики коммерческих автомобилей, в т.ч. например АДАС.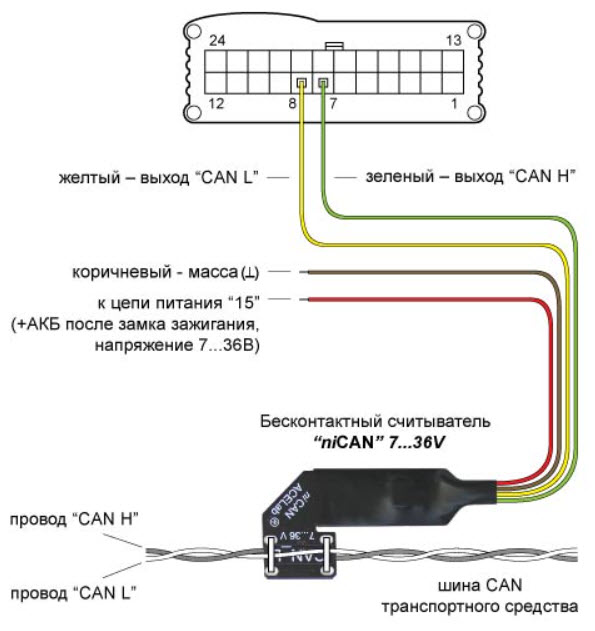
Защищенная шина CAN
Как показали недавние хакерские атаки на CAN, классическая CAN уязвима. Если хакеры получат доступ к шине CAN (например, по беспроводной сети), они могут, например, отключить важные функции. Аутентификация CAN FD через модуль защищенной бортовой связи (SecOC) может быть драйвером развертывания ключа.
С появлением CAN FD будет несколько вариантов использования для регистрации данных CAN FD:
Регистрация данных с автомобилей
По мере внедрения CAN FD в новых автомобилях, регистраторы данных CAN FD станут ключевыми для OEM R&D и диагностики
Регистратор CAN FD
Телематика для тяжелого транспорта FD (гибкая скорость передачи данных) станет ключом к будущей телематике для тяжелых условий эксплуатации
Телематика j1939
Профилактическое обслуживание
По мере развертывания CANopen FD новому промышленному оборудованию потребуются регистраторы CAN FD IoT для прогнозирования и предотвращения поломок
Профилактическое обслуживание
Черный ящик автомобиля/машины
Регистратор CAN FD может служить «черным ящиком», например. новые прототипы транспортных средств, предоставление данных для диагностики и НИОКР
новые прототипы транспортных средств, предоставление данных для диагностики и НИОКР
черный ящик шины CAN
У вас есть вариант использования CAN FD для регистрации? Участвуйте в бесплатных спаррингах!
Свяжитесь с нами
Регистрация CAN FD – практические соображения
При регистрации данных CAN FD важны следующие соображения:
До ISO 11898-1:2015 в стандарте CAN FD обнаружена уязвимость, связанная с проверкой ошибок. Контроллеры, соответствующие обновленному стандарту, иногда называют «ISO CAN FD».
При записи данных из раннего прототипа системы CAN FD вам может потребоваться включить режим «NON-ISO CAN FD», если ваше устройство поддерживает это.
По умолчанию ваш регистратор данных CAN FD может обрабатывать как классические сообщения данных CAN, так и сообщения данных CAN FD — без предварительной настройки между ними. Точно так же вам не нужно предварительно указывать, включено ли или выключено переключение битрейта только для целей ведения журнала.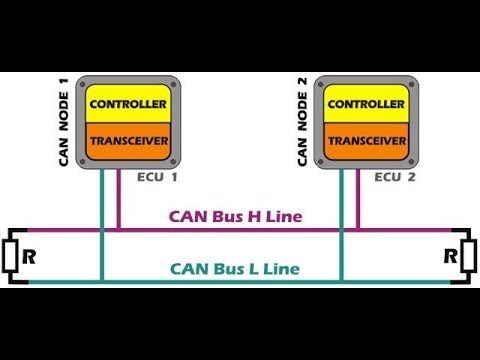
Однако при передаче данных по шине CAN необходимо указать, следует ли использовать переключение скорости передачи данных или нет. Если эта функция включена, полезные данные передаются со второй скоростью передачи данных системы, которая обычно составляет 2 или 4 Мбит/с.
CAN FD сводит к минимуму необходимость обработки многопакетных сообщений. Это может значительно упростить разработку программного обеспечения для преобразования необработанных данных CAN FD в удобочитаемую форму в интересах конечных пользователей анализаторов CAN FD.
Кроме того, стандартный формат базы данных CAN, DBC, также поддерживает правила преобразования CAN FD. Таким образом, всегда рекомендуется собирать правила масштабирования в файле DBC, чтобы обеспечить легкий переход между различным программным обеспечением CAN, таким как, например. asammdf и т. д.
Пример: CANedge CAN FD logger
CANedge позволяет легко записывать данные CAN FD на SD-карту емкостью 8–32 ГБ. Просто подключите его к приложению CAN FD, чтобы начать регистрацию, и обработайте данные с помощью бесплатного программного обеспечения/API.
Купить Регистрация данных CAN FD.
 0
0Конечно, устаревшие приложения без требований к полосе пропускания и полезной нагрузке по-прежнему будут использовать классический CAN. Кроме того, сообщество CAN уже разрабатывает следующее поколение уровня канала передачи данных CAN, поддерживающего полезную нагрузку до 2048 байт. Этот подход можно рассматривать как альтернативу 10 Мбит/с Ethernet. Таким образом, еще предстоит точно определить, какую роль CAN FD будет играть в будущее — но оно определенно будет на подъеме.
Дополнительные вводные сведения см. в разделе наших руководств или загрузите «Полное руководство» в формате PDF.
Необходимо зарегистрировать данные CAN FD?
Получите регистратор CAN FD уже сегодня!
Купить сейчас Свяжитесь с нами
Рекомендуется для вас
Объяснение OBD2 – CSS Electronics
Нужно простое и практичное введение в OBD2?
В этом руководстве мы представляем протокол бортовой диагностики (OBD2), вкл. разъем OBD2, параметр OBD2 идентификаторы (PID) и связь с CAN-шиной.
Примечание. Это практическое введение , поэтому вы также узнаете, как запрашивать и декодировать данные OBD2,
примеры использования кейлоггинга и практические советы.
Узнайте ниже, почему это стало учебником #1 OBD2 .
Вы также можете посмотреть наше вступительное видео OBD2 выше или получить PDF
В этой статье
- Что такое OBD2?
- Разъем OBD2
- OBD2 против шины CAN
- История и будущее
- PID и необработанные кадры
- Как регистрировать данные OBD2?
- Примеры использования ведения журнала OBD2
Автор: Мартин Фальх
(обновлено в апреле 2022 г.)
Что такое OBD2?
Короче говоря, OBD2 — это встроенная система самодиагностики вашего автомобиля.
Вероятно, вы уже сталкивались с OBD2:
Когда-либо замечали неисправность индикатор на приборной панели?
Это ваша машина сообщает вам о проблеме. Если вы посетите механика, он будет использовать ОБД2 сканер для диагностики проблемы.
Для этого он подключит считыватель OBD2 к 16-контактному разъему OBD2. разъем возле руля.
разъем возле руля.
Это позволяет ему считывать коды OBD2, также известные как диагностические коды неисправностей (DTC), для проверки и устранения проблемы.
Разъем OBD2
Разъем OBD2 позволяет легко получить доступ к данным из вашего автомобиля. Стандарт SAE J1962 определяет два гнезда. Типы 16-контактных разъемов OBD2 (A и B).
На рисунке показан пример штырькового разъема OBD2 типа A (также иногда называемого каналом передачи данных). Коннектор, DLC).
Обратите внимание:
- Разъем OBD2 находится рядом с рулевым колесом, но может быть скрыт за ним. крышки/панели
- Контакт 16 подает питание от аккумулятора (часто при выключенном зажигании)
- Распиновка OBD2 зависит от протокола связи
- Наиболее распространенным протоколом является CAN (через ISO 15765), что означает, что контакты 6 (CAN-H) и 14 (CAN-L) обычно подключается
Разъем OBD2 — тип A по сравнению с B
На практике можно встретить разъем OBD2 как типа А, так и типа В. Как правило, тип А встречается в
легковых автомобилей, в то время как тип B распространен в транспортных средствах средней и большой грузоподъемности.
Как правило, тип А встречается в
легковых автомобилей, в то время как тип B распространен в транспортных средствах средней и большой грузоподъемности.
Как видно из рисунка, оба типа имеют одинаковые выводы OBD2, но имеют два разных выходы питания (12В для типа А и 24В для типа В). Часто скорость передачи также будет отличаться, с автомобили обычно используют 500 КБ, в то время как большинство большегрузных автомобилей используют 250 КБ (в последнее время с поддержкой 500К).
Чтобы физически различать два типа разъемов OBD2, обратите внимание, что разъем OBD2 типа B имеет прерывистый желобок посередине. В результате кабель адаптера OBD2 типа B будет совместим с обоими типами A и B, в то время как тип A не подходит для гнезда типа B.
Есть ли в моей машине OBD2?
Короче: Возможно!
Почти все новые автомобили поддерживают OBD2 и большинство из них работают на CAN (ISO 15765). Для старых автомобилей имейте в виду, что даже если 16-контактный
Разъем OBD2 присутствует, он может все еще не поддерживать
ОБД2. Одним из способов определения соответствия является определение где и когда он был куплен новым :
Одним из способов определения соответствия является определение где и когда он был куплен новым :
Связь между OBD2 и шиной CAN
Бортовая диагностика, OBD2, является «протоколом более высокого уровня» (подобно языку). CAN — это метод связи (например, Телефон).
В частности, стандарт OBD2 определяет разъем OBD2, в т.ч. набор из пяти протоколов, которые он может запускать на (см. ниже). Кроме того, с 2008 года шина CAN (ISO 15765) является обязательным протоколом для OBD2 во всех автомобилях, продаваемых в США.
Что такое стандарт ISO 15765?
ISO 15765 относится к набору ограничений, применяемых к стандарту CAN (который сам определен в ISO 11898). Можно сказать, что ISO 15765 похож на «CAN для автомобилей».
В частности, ISO 15765-4 описывает физический уровень, уровень канала передачи данных и сетевой уровень, стремясь стандартизировать
интерфейс шины CAN для внешнего тестового оборудования. ISO 15765-2, в свою очередь, описывает транспортный уровень (ISO
TP) для отправки кадров CAN с полезной нагрузкой, превышающей 8 байт. Этот подстандарт также иногда называют
в качестве диагностической связи по CAN (или DoCAN). Смотрите также 7
иллюстрация модели уровня OSI.
Этот подстандарт также иногда называют
в качестве диагностической связи по CAN (или DoCAN). Смотрите также 7
иллюстрация модели уровня OSI.
OBD2 также можно сравнить с другими протоколами более высокого уровня (например, J1939, CANopen).
Пять протоколов OBD2
Как объяснялось выше, сегодня шина CAN служит основой для связи OBD2 в подавляющем большинстве автомобилей. через ISO 15765.
Однако, если вы осматриваете более старый автомобиль (до 2008 г.), полезно знать остальные четыре протокола, которые были использованы в качестве основы для OBD2. Обратите также внимание на распиновку, по которой можно определить, какой протокол может использоваться в вашем автомобиле.
- ISO 15765 (шина CAN) : обязателен в автомобилях США с 2008 года и сегодня используется во многих странах. большинство автомобилей
- ISO14230-4 (KWP2000) : Протокол ключевых слов 2000 был общим протоколом для автомобилей 2003+ года в например Азия
- ISO9141-2 : Используется в автомобилях ЕС, Chrysler и Азии в 2000-04
- SAE J1850 (VPW) : используется в основном в старых автомобилях GM .
- SAE J1850 (PWM) : Используется в основном в старых автомобилях Ford
Ниже перечислены некоторые наиболее актуальные стандарты SAE/ISO, относящиеся к OBD2:
SAE J1962: Настоящий стандарт определяет физический разъем, используемый для интерфейса OBD2, то есть разъем OBD2. Стандарт описывает как автомобильный разъем OBD2, так и разъем, используемый внешним тестовым оборудованием (например, сканером OBD2 или Регистратор данных OBD2). В частности, стандарт предписывает расположение и доступ к разъему OBD2.
SAE J1979: SAE J1979
Стандарт описывает методы запроса диагностической информации по протоколу OBD2. Он также включает в себя
список стандартизированных общедоступных идентификаторов параметров OBD2
(OBD2 PID), которые OEM-производители автомобилей могут
внедрять в автомобили (хотя они и не обязаны это делать). OEM-производители транспортных средств также могут принять решение о внедрении дополнительных
проприетарные PID OBD2, помимо тех, что указаны в стандарте SAE J1979.
SAE J1939: Стандарт J1939 описывает протокол данных, используемый для связи большегрузных автомобилей. В то время как OBD2 Информация PID доступна только по запросу с помощью тестового оборудования OBD2, J1939 протокол используется в большинстве большегрузные транспортные средства как основное средство передачи CAN-трафика — это означает, что данные передаются непрерывно.
ISO 11898: Это Стандарт описывает уровень канала передачи данных шины CAN и физический уровень, служащий основой для связи OBD2. в большинстве автомобилей сегодня
ISO 15765-2: Стандарт ISO-TP описывает «Транспортный уровень», то есть как отправлять пакеты данных более 8 байт по шине CAN. Этот стандарт важен, поскольку он формирует основу для унифицированного Связь диагностических служб (UDS), основанная на отправке многокадровых пакетов данных CAN.
ИСО 14229: Здесь подробно описывается связь UDS.
Может быть полезно сравнить протокол OBD2 с другими протоколами запроса/ответа на CAN.
В нашем введении к Унифицированные диагностические услуги (UDS) мы сравниваем UDS с OBD2, WWH-OBD и OBDonUDS.
В нашем введении в CCP/XCP на МОЖЕМ ли мы сравнить протокол калибровки CAN (CCP) и универсальный протокол измерений и калибровки (XCP) на CAN против UDS.
OBD2 обычно ориентирован на контроль выбросов, а UDS ориентирован на диагностику и доступ для чтения / записи к ЭБУ. — в первую очередь для серийных автомобилей. CCP и XCP сосредоточены на измерении и калибровке электронных блоков управления в пределах ЭБУ прототипов транспортных средств, и они менее ориентированы на диагностику.
История OBD2
OBD2 происходит из Калифорнии , где Калифорнийский совет по воздушным ресурсам (CARB) требовал OBD во всех новых автомобилях с 1991+ для целей контроля выбросов.
Стандарт OBD2 был рекомендован Обществом
Automotive Engineers (SAE) и стандартизированные коды DTC и разъем OBD для разных производителей (SAE J1962).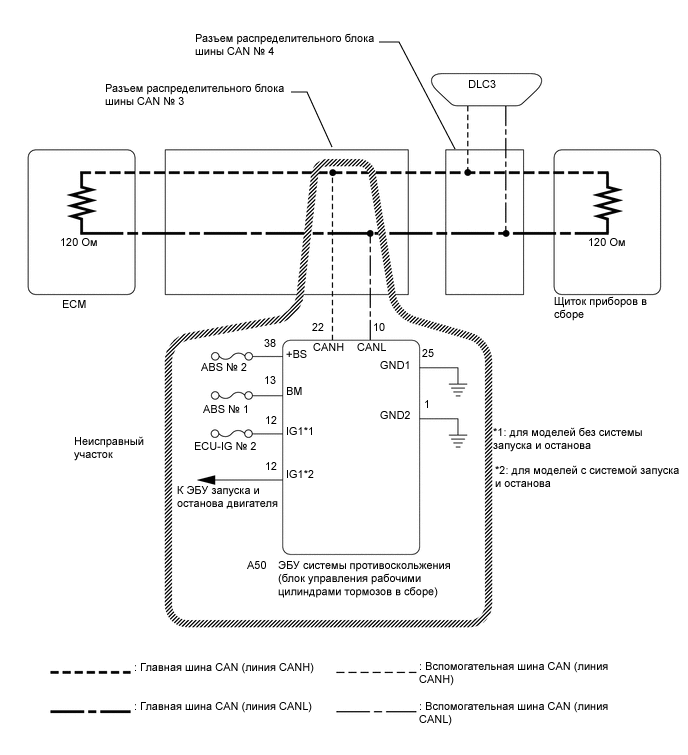
Оттуда, стандарт OBD2 был развернут шаг за шагом :
- 1996: OBD2 стал обязательным в США для легковых автомобилей / легких грузовиков
- 2001: Требуется в ЕС для бензиновых автомобилей
- 2003: Требуется в ЕС также для автомобилей с дизельным двигателем (EOBD)
- 2005: OBD2 требовался в США для среднего режима работы. автомобили
- 2008: американских автомобилей должны использовать ISO 15765-4 (CAN) как OBD2 основа
- 2010: Наконец, OBD2 потребовался для большегрузных автомобилей США
OBD2 будущее
OBD2 останется здесь, но в какой форме?
Два потенциальных маршрута могут радикально изменить OBD2:
В современном мире подключенных автомобилей тесты OBD2 могут показаться громоздкими: Контроль выбросов вручную
проверки отнимают много времени и стоят дорого.![]()
Решение? OBD3 — добавление телематики на все автомобили .
По сути, OBD3 добавляет небольшой радиотранспондер (как, например, плата за проезд по мосту) ко всем автомобилям. Используя это, автомобиль автомобиль идентификационный номер (VIN) и коды DTC могут быть отправлены через WiFi на центральный сервер для чеки.
Многие современные устройства уже поддерживают передачу данных CAN или OBD2 через Wi-Fi/сотовую связь. CANedge2 Wi-Fi CAN-логгер.
Это экономит средства и удобно, но также представляет собой политическую проблему из-за необходимости наблюдения.
Протокол OBD2 изначально был разработан для стационарного контроля выбросов.
Тем не менее, сегодня OBD2 широко используется для генерации данных в режиме реального времени третьими лицами — через ключи OBD2, регистраторы CAN и т. д. Однако немецкая автомобильная промышленность хочет изменить это:
OBD был разработан для обслуживания автомобилей в ремонтных мастерских.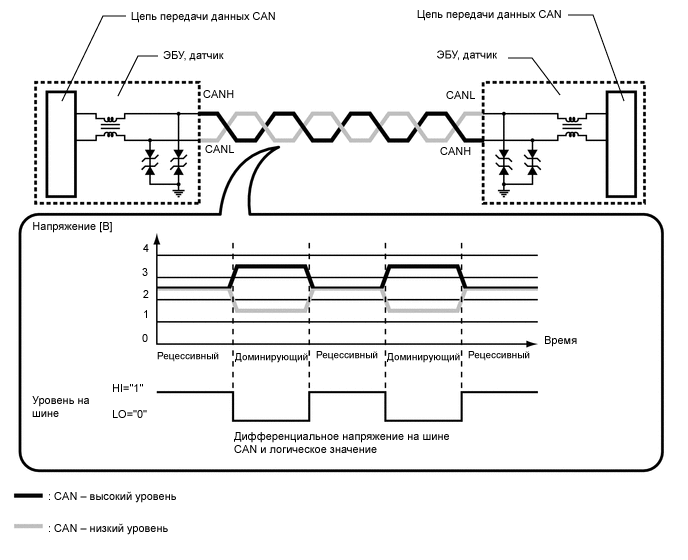 Ни в коем случае
было ли это предназначено для того, чтобы позволить третьим сторонам построить форму экономики, основанной на данных, на доступе
через этот интерфейс «
Ни в коем случае
было ли это предназначено для того, чтобы позволить третьим сторонам построить форму экономики, основанной на данных, на доступе
через этот интерфейс «
— Кристоф Гроте, старший вице-президент по электронике, BMW (2017)
Предлагается «отключить» функцию OBD2 во время вождения — и вместо этого собирать данные в центральный сервер. Это позволит производителям эффективно контролировать автомобильные «большие данные».
Аргументация основана на безопасности (например, устранение риска взлом), хотя многие видят это как коммерческий ход. Станет ли это реальной тенденцией, покажет время, но на самом деле это может взорвать рынок для OBD2 третьей стороны Сервисы.
Идентификаторы параметров OBD2 (PID)
Зачем вам данные OBD2?
Механики, очевидно, заботятся о кодах неисправности OBD2 (возможно, вы тоже), в то время как регулирующие органы нуждаются в OBD2 для контроля
эмиссия.
Но протокол OBD2 также поддерживает широкий диапазон идентификаторов стандартных параметров (PID), которые могут быть зарегистрированы на большинстве автомобилей.
Это означает, что вы можете легко получить человекочитаемый OBD2 данные вашего автомобиля о скорости, оборотах в минуту, положении дроссельной заслонки и многом другом.
Другими словами, OBD2 позволяет легко анализировать данные вашего автомобиля — в отличие от фирменных OEM-систем. необработанные данные CAN.
В принципе, записать необработанные кадры CAN из вашего автомобиля несложно. Если вы, например. подключите регистратор CAN к разъему OBD2, вы начнете регистрировать
транслирует данные по шине CAN «из коробки». Однако необработанные сообщения CAN необходимо декодировать с помощью базы данных правил преобразования.
(DBC) и подходящее программное обеспечение CAN, поддерживающее декодирование DBC (например, asammdf). Задача
что эти файлы CAN DBC обычно являются проприетарными, что делает необработанные данные CAN нечитаемыми, если только вы не являетесь
автомобильный ОЕМ.
Автомобильные хакеры могут попытаться перепроектировать правила, хотя это может быть сложно. Однако CAN по-прежнему остается единственным способом получить «полный доступ» к данные вашего автомобиля — в то время как OBD2 предоставляет доступ только к ограниченному подмножеству данных.
Регистрация данных OBD2 работает следующим образом:
- Вы подключаете OBD2 регистратор к разъему OBD2
- Используя инструмент, вы отправляете «кадры запроса» через CAN
- Соответствующие ЭБУ отправляют «ответные кадры» через CAN
- Декодируйте необработанные ответы OBD2, например, через OBD2 ДБК
Другими словами, регистратор CAN, способный передавать Кадры CAN также можно использовать в качестве регистратора OBD2.
Обратите внимание, что автомобили различаются в зависимости от модели/года по тому, какие OBD2 PID они поддерживают. Подробную информацию см. в нашем регистраторе данных OBD2. руководство.
Регистратор данных CANedge OBD2
CANedge позволяет легко регистрировать
Данные OBD2 на SD-карту 8-32 ГБ. Просто укажите, какие OBD2 PID вы хотите запросить, а затем подключите их к вашему
автомобиля через адаптер OBD2 на
начать регистрацию. Обрабатывайте данные с помощью бесплатного программного обеспечения/API и нашего OBD2 DBC.
Просто укажите, какие OBD2 PID вы хотите запросить, а затем подключите их к вашему
автомобиля через адаптер OBD2 на
начать регистрацию. Обрабатывайте данные с помощью бесплатного программного обеспечения/API и нашего OBD2 DBC.
БД2 регистратор данных
Необработанные сведения о кадре OBD2
Чтобы начать запись данных OBD2, полезно понять основы структуры необработанных сообщений OBD2. В
упрощенно говоря, сообщение OBD2 состоит из идентификатора и данных . Дальше,
данные разделены на режим, PID и байты данных (A, B, C, D), как показано ниже.
В
упрощенно говоря, сообщение OBD2 состоит из идентификатора и данных . Дальше,
данные разделены на режим, PID и байты данных (A, B, C, D), как показано ниже.
Идентификатор: Для сообщений OBD2 используется стандартный 11-битный идентификатор, используемый для различения «сообщения-запросы» (ID 7DF) и «ответные сообщения» (ID 7E8-7EF). Обратите внимание, что 7E8 обычно находится там, где главный двигатель или ЭБУ реагируют на.
Длина: Это просто отражает длину в байтах оставшихся данных (от 03 до 06). За Например, в примере «Скорость автомобиля» для запроса это 02 (поскольку следуют только 01 и 0D), а для ответа — 03, поскольку следуют 41, 0D и 32.
Режим: Для запросов это будет между 01-0A. Для ответов 0 заменяется на 4 (т.е. 41,
42, …, 4А). Существует 10 режимов, описанных в стандарте SAE J1979 OBD2. Режим 1 показывает текущие данные
и, например, используется для просмотра скорости автомобиля в реальном времени, оборотов в минуту и т. д. Другие режимы используются, например, для показать или очистить
сохраненные диагностические коды неисправностей и данные о стоп-кадре.
д. Другие режимы используются, например, для показать или очистить
сохраненные диагностические коды неисправностей и данные о стоп-кадре.
PID: Для каждого режима существует список стандартных OBD2 PID — например. в режиме 01 PID 0D — это автомобиль Скорость. Полный список см. в нашем обзоре OBD2 PID. У каждого PID есть описание, а у некоторых есть указанный минимум/максимум и формула преобразования.
Формула для скорости, например. просто A, что означает, что байт данных A (который находится в HEX) преобразуется в десятичный в получить преобразованное значение км/ч (т.е. 32 становится 50 км/ч выше). Например, RPM (PID 0C), формула (256*A + B) / 4.
A, B, C, D: Это байты данных в HEX, которые необходимо преобразовать в десятичную форму перед они используются в расчетах по формуле PID. Обратите внимание, что последний байт данных (после Dh) не используется.
Пример запроса/ответа OBD2
Пример запроса/ответа сообщения CAN для PID «Скорость автомобиля» со значением 50 км/ч можно увидеть
на иллюстрации.
Обратите внимание, в частности, как формула для OBD2 PID 0D (скорость автомобиля) просто включает 4-й байт (0x32) и преобразование его в десятичную форму (50).
В некоторых автомобилях (например, в фургонах и автомобилях малой/средней/тяжелой грузоподъемности) вы можете обнаружить, что необработанные данные CAN использует расширенные 29-битные идентификаторы CAN вместо 11-битных идентификаторов CAN.
В этом случае вам, как правило, потребуется изменить запросы PID OBD2, чтобы вместо этого использовать CAN ID 18DB33F1. из 7ДФ. Структура полезных данных остается идентичной примерам для 11-битных идентификаторов CAN.
Если автомобиль отвечает на запросы, вы обычно видите ответы с идентификаторами CAN от 18DAF100 до 18DAF1FF. (на практике обычно 18DAF110 и 18DAF11E). Идентификатор ответа также иногда отображается в ‘J1939 польских песо формы, в частности, PGN 0xDA00 (55808), который в стандарте J1939-71 помечен как «Зарезервировано для ISO 15765-2».
Мы предоставляем файл OBD2 DBC как для
11-битные и 29-битные ответы, обеспечивающие простое декодирование данных в большинстве программных инструментов CAN.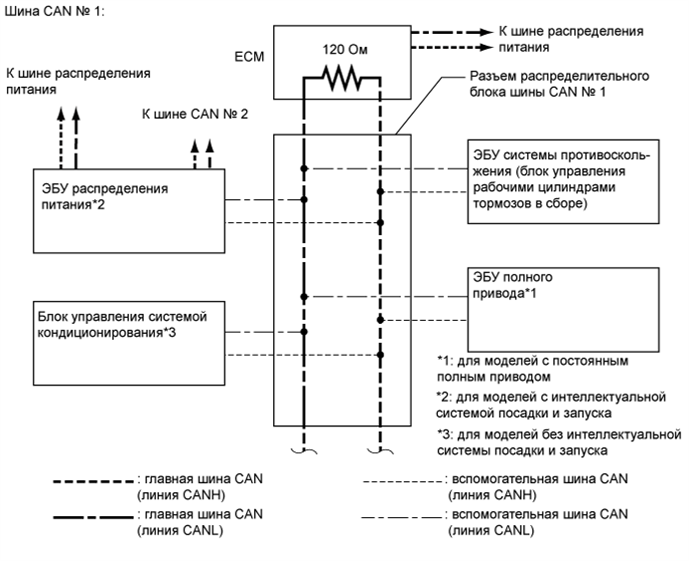
10 служб OBD2 (или режимов)
Существует 10 диагностических служб OBD2 (или режимов), как описано в стандарте SAE J1979 OBD2. Режим 1 показывает Текущие данные и используются для просмотра параметров в реальном времени, таких как скорость автомобиля, число оборотов в минуту, положение дроссельной заслонки и т. д. Другие режимы, например. используется для отображения/удаления диагностических кодов неисправностей (DTC) и отображения данных стоп-кадра.
Производители не обязаны поддерживать все диагностические службы — они могут поддерживать режимы за пределами этих 10 услуги (т. е. специальные услуги OBD2 производителя).
Регистрация данных OBD2 – примеры использования использоваться для снижения затрат на топливо, улучшения вождения, тестирования прототипов деталей и страхование
БД2 регистратор
Диагностика автомобиля в режиме реального времени
Интерфейсы OBD2 могут использоваться для потоковой передачи удобочитаемых данных OBD2 в режиме реального времени, например. для диагностики автомобиля
выдает
для диагностики автомобиля
выдает
obd2 потоковая передача
Профилактическое обслуживание
Мониторинг автомобилей и легких грузовиков с помощью IoT Регистраторы OBD2 в облаке для прогнозирования и предотвращения поломок
Профилактическое обслуживание
Регистратор черного ящика автомобиля оборудование, предоставляя данные, например, для споры или диагностика
может шина blackbox
У вас есть вариант использования регистрации данных OBD2? Участвуйте в бесплатных спаррингах!
Свяжитесь с нами
Ниже мы описываем наиболее распространенные категории анализаторов OBD2:
Сканеры OBD2: Используются в качестве инструментов диагностики автомобилей при статическом считывании/очистке
кодов неисправности, например, механика. Сканирующий инструмент OBD2 обычно используется для диагностики проблем с автомобилем, например. обозначается активированной MIL. Различный
типы существуют, и некоторые частные лица используют недорогие
варианты как простые считыватели автомобильных кодов для самостоятельной диагностики состояния их автомобиля.
обозначается активированной MIL. Различный
типы существуют, и некоторые частные лица используют недорогие
варианты как простые считыватели автомобильных кодов для самостоятельной диагностики состояния их автомобиля.
Ключи Bluetooth OBD2: Существует множество ключей Bluetooth OBD2, которые позволяют вы просматриваете данные автомобиля прямо на своем смартфоне через приложение. Обычно bluetooth-ключи OBDII имеют низкую стоимость. и просты в использовании, хотя также ограничены с точки зрения их удобства использования за пределами bluetooth-to-app цель визуализации. Назначение bluetooth-ключа OBD2 обычно состоит в том, чтобы контролировать личное поведение за рулем и состояние автомобиля.
Интерфейсы OBD2: Передача данных OBD2 в режиме реального времени на ПК через USB
потоковое. Интерфейсы OBD2 обычно используются в расширенной диагностике автомобилей и разработке автомобилей OEM.
Кроме того, интерфейсы CAN, поддерживающие запросы OBD2, могут быть полезны как часть обратного хода.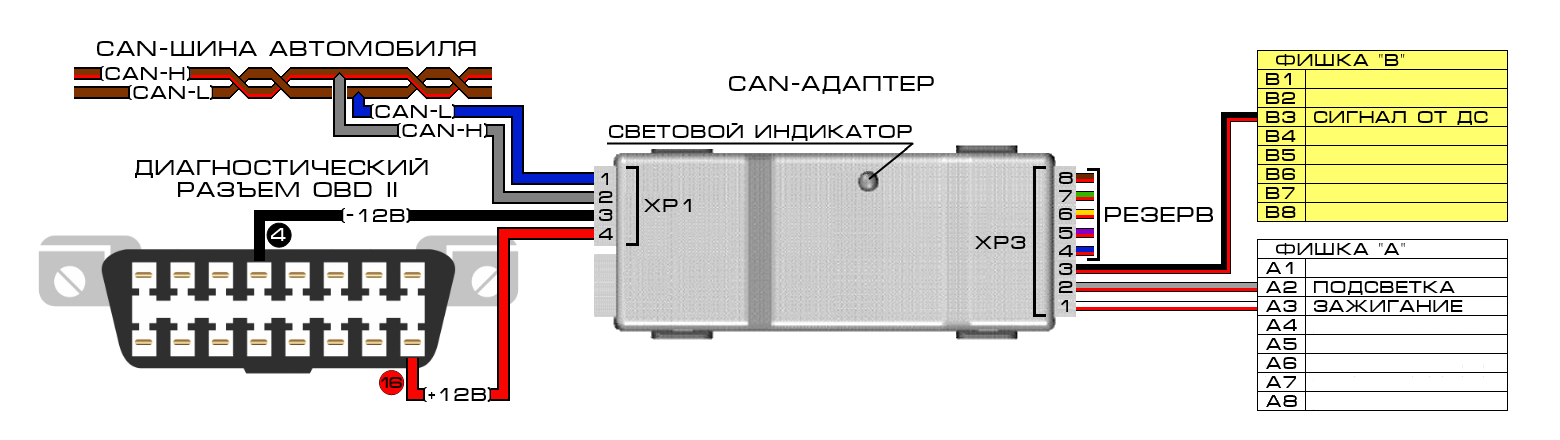 инженерия
собственные параметры шины CAN.
инженерия
собственные параметры шины CAN.
Регистраторы OBD2: Используется для регистрации данных OBD2 из автомобиля на SD-карту — идеально подходит, например, для Варианты использования «черного ящика» или полевые испытания прототипа автомобильной промышленностью. ОЕМ. Например, CANedge1 позволяет регистрировать CAN автобус данных, а также запрашивать данные OBD2, отправляя запросы пользовательских кадров на шину CAN.
Регистратор WiFi OBD2: WiFi OBD2
регистраторы и ключи WiFi OBD2 позволяют автоматически передавать данные OBD2 через WiFi (включая 3G/4G)
на сервер/облако. Регистраторы Wi-Fi OBD2 обычно используются для телематики OBD2.
случаи использования, когда данные об автопарке необходимо собирать автоматически и визуализировать с помощью данных OBD2
приборные панели. Например, CANedge2 позволяет
вы регистрируете данные CAN/OBD2 и автоматически передаете их через точку доступа Wi-Fi
на собственный сервер. Данные могут быть обработаны в бесплатных программных средствах и
например визуализируется на информационных панелях Grafana.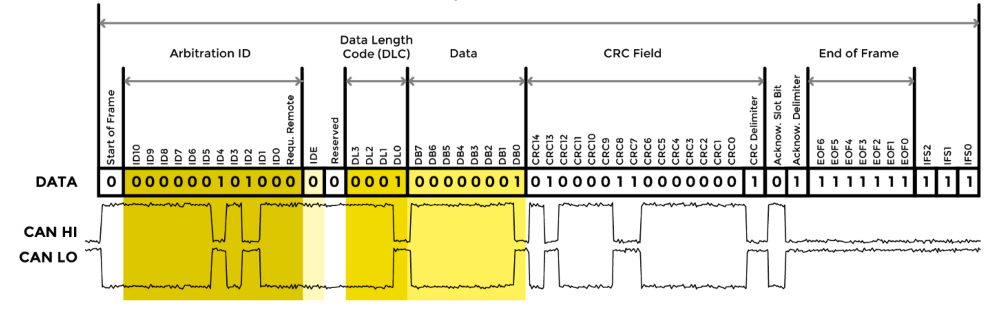
CANedge2 позволяет легко записывать данные OBD2 на SD-карту и загружать их через WiFi на собственный сервер.
Для получения дополнительной информации см. раздел наших руководств или загрузите «Полное руководство» PDF.
Необходимо регистрировать/потоковые данные OBD2?
Получите регистратор данных OBD2 уже сегодня!
Купить сейчас Свяжитесь с нами
Рекомендуется для вас
Сеть контроллеров (CAN BUS) Протокол
Учебное пособие по протоколу шины CAN дает обзор стандартов сети контроллеров ISO 11898-1 и ISO 11898-2. Этот учебник представляет собой отличное введение в основы CAN (локальной сети контроллеров), поскольку он используется в автомобильном дизайне, элементах управления промышленной автоматизацией и многих других приложениях.
Содержание
- Введение: шина CAN
- Сообщения CAN
- Физический уровень CAN
- Изображения осциллографа CAN
- Разъемы CAN
- Время бита CAN
- Обработка ошибок CAN
- Протоколы более высокого уровня
Наш обновленный видеокурс из 8 частей устанавливает новый стандарт обучения CAN.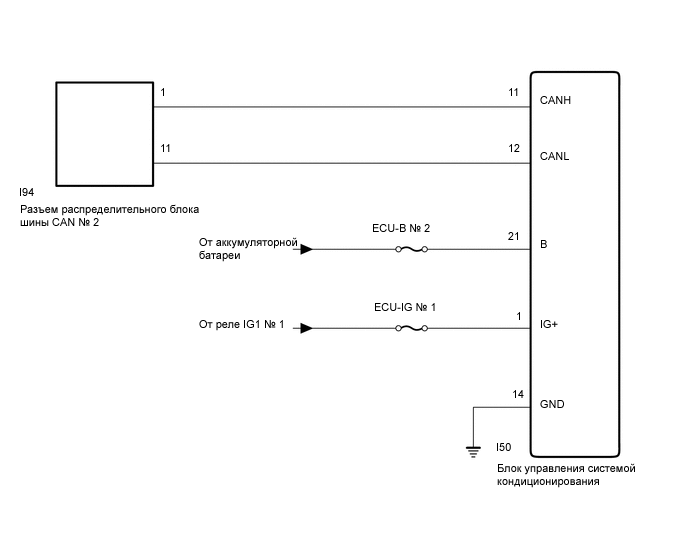
Пройди курс
CAN — это сокращение от «локальная сеть контроллеров». Сеть контроллеров представляет собой электронную коммуникационную шину, определенную стандартами ISO 11898. Эти стандарты определяют, как происходит связь, как конфигурируется проводка и как строятся сообщения, среди прочего. В совокупности эта система называется шиной CAN.
Чтобы лучше понять CAN, шина CAN относится к широковещательному типу шины. Это означает, что все узлы могут «слышать» все передачи. Невозможно отправить сообщение только определенному узлу; все узлы неизменно будут получать весь трафик. Однако аппаратное обеспечение CAN обеспечивает локальную фильтрацию, так что каждый узел может реагировать только на интересные сообщения. Мы обсудим это подробнее в Разделе 2, «Сообщения CAN».
Мы также обсудим, как шина использует невозврат к нулю (NRZ) с вставкой битов. В этой системе модули подключаются к шине проводным способом: если только один узел переводит шину в состояние логического 0, то вся шина находится в этом состоянии независимо от количества узлов, передающих логическую 1.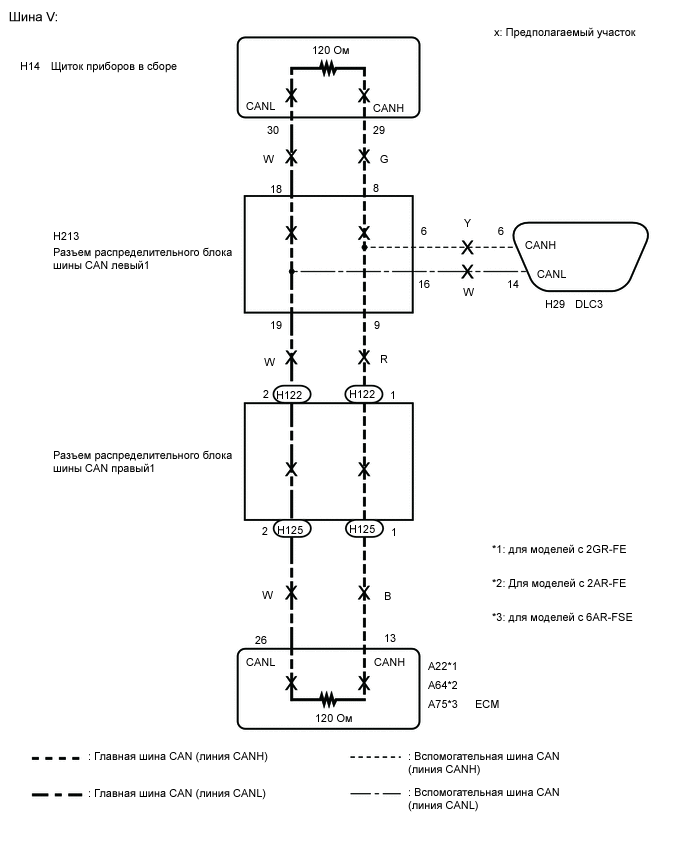
Стандарт CAN определяет четыре различных типа сообщений. В сообщениях используется умная схема побитового арбитража для управления доступом к шине, и каждое сообщение помечается приоритетом.
Стандарт CAN также определяет сложную схему обработки и локализации ошибок, которая более подробно описана в Разделе 7, «Обработка ошибок CAN».
Битовая синхронизация и тактовая синхронизация обсуждаются в разделе 6 этого руководства. Вот битовый калькулятор времени, который вы можете использовать для расчета параметров шины CAN и регистрационных настроек.
Проводка шины CAN может быть реализована с использованием различных физических уровней (раздел 3), некоторые из которых описаны здесь, а также используется довольно много типов разъемов шины CAN (раздел 5). Мы также предоставляем ряд изображений осциллографа (раздел 4) для тех, кто интересуется деталями сообщения.
Шина CAN является шиной широковещательного типа. Это означает, что все узлы могут «слышать» все передачи.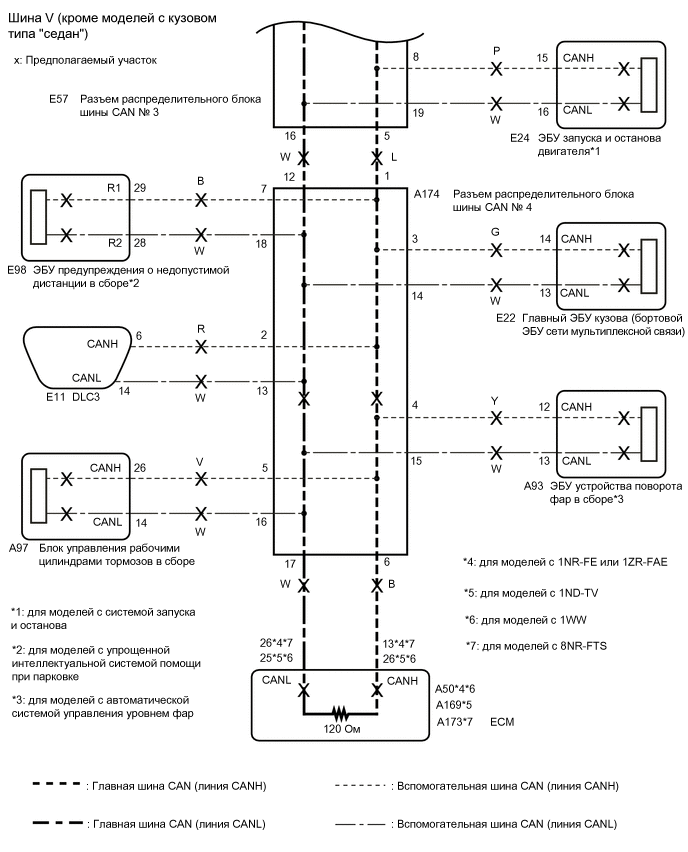 Невозможно отправить сообщение только определенному узлу; все узлы неизменно будут получать весь трафик. Однако аппаратное обеспечение CAN обеспечивает локальную фильтрацию, так что каждый узел может реагировать только на интересные сообщения.
Невозможно отправить сообщение только определенному узлу; все узлы неизменно будут получать весь трафик. Однако аппаратное обеспечение CAN обеспечивает локальную фильтрацию, так что каждый узел может реагировать только на интересные сообщения.
Сообщения CAN
CAN использует короткие сообщения – максимальная загрузка утилиты 94 бита. В сообщениях нет явного адреса; вместо этого можно сказать, что сообщения адресованы по содержанию, то есть их содержимое неявно определяет их адрес.
Типы сообщений
Существует четыре различных типа сообщений (или «фреймов») на шине CAN:
- кадр данных
- Удаленная рама
- Кадр ошибки
- Перегрузка кадра
Резюме: «Всем привет, вот некоторые данные, помеченные X, надеюсь, вам понравится!»
Кадр данных является наиболее распространенным типом сообщений. Он состоит из следующих основных частей (некоторые детали опущены для краткости):
- Арбитражное поле, которое определяет приоритет сообщения, когда два или более узла борются за шину.
 Арбитражное поле содержит:
Арбитражное поле содержит:- Для CAN 2.0A — 11-битный идентификатор и один бит, бит RTR, который является доминирующим для кадров данных.
- Для CAN 2.0B — 29-битный идентификатор (который также содержит два рецессивных бита: SRR и IDE) и бит RTR.
- Поле данных, содержащее от нуля до восьми байтов данных.
- Поле CRC, содержащее 15-битную контрольную сумму, рассчитанную для большинства частей сообщения. Эта контрольная сумма используется для обнаружения ошибок.
- Слот подтверждения; любой CAN-контроллер, который смог правильно принять сообщение, отправляет бит подтверждения в конце каждого сообщения. Передатчик проверяет наличие бита подтверждения и повторно передает сообщение, если подтверждение не обнаружено.
Примечание 1: Следует отметить, что наличие бита подтверждения на шине не означает, что сообщение получил какой-либо из предполагаемых адресатов. Единственное, что мы знаем, это то, что один или несколько узлов на шине приняли его правильно.
Примечание 2. Идентификатор в поле арбитража, несмотря на его имя, не обязательно идентифицирует содержимое сообщения.
A Кадр данных CAN 2.0A («стандартный CAN»).
A Кадр данных CAN 2.0B («расширенный CAN»).
Резюме: «Всем привет, кто-нибудь может предоставить данные с пометкой X?»Удаленный кадр аналогичен кадру данных с двумя важными отличиями:
- он явно помечен как удаленный кадр (бит RTR в поле арбитража является рецессивным) и
- нет поля данных.
Удаленный фрейм предназначен для запроса передачи соответствующего фрейма данных. Если, скажем, узел A передает удаленный кадр с полем арбитража, установленным на 234, то узел B, если он правильно инициализирован, может ответить кадром данных с полем арбитража, также установленным на 234.
Удаленные фреймы могут использоваться для реализации управления трафиком шины типа запрос-ответ. Однако на практике Remote Frame используется мало. Также стоит отметить, что стандарт CAN не предписывает описанное здесь поведение. Большинство контроллеров CAN можно запрограммировать либо на автоматический ответ на удаленный кадр, либо на уведомление локального ЦП.
Также стоит отметить, что стандарт CAN не предписывает описанное здесь поведение. Большинство контроллеров CAN можно запрограммировать либо на автоматический ответ на удаленный кадр, либо на уведомление локального ЦП.
Есть одна загвоздка с удаленным кадром: код длины данных должен быть установлен равным длине ожидаемого ответного сообщения. В противном случае арбитраж не сработает.
A Remote Frame (тип 2.0A)
Иногда утверждается, что узел, отвечающий на Remote Frame, начинает свою передачу, как только идентификатор распознан, тем самым «заполняя» пустой Remote Frame. Это не тот случай.
Резюме: (все вслух) «О ДОРОГИЕ, ДАВАЙТЕ ПОПРОБУЕМ ЕЩЕ РАЗ»
Проще говоря, кадр ошибки — это специальное сообщение, которое нарушает правила формирования сообщения CAN. Он передается, когда узел обнаруживает ошибку, и заставит все остальные узлы обнаружить ошибку, поэтому они также будут отправлять кадры ошибок. Затем передатчик автоматически попытается повторно передать сообщение.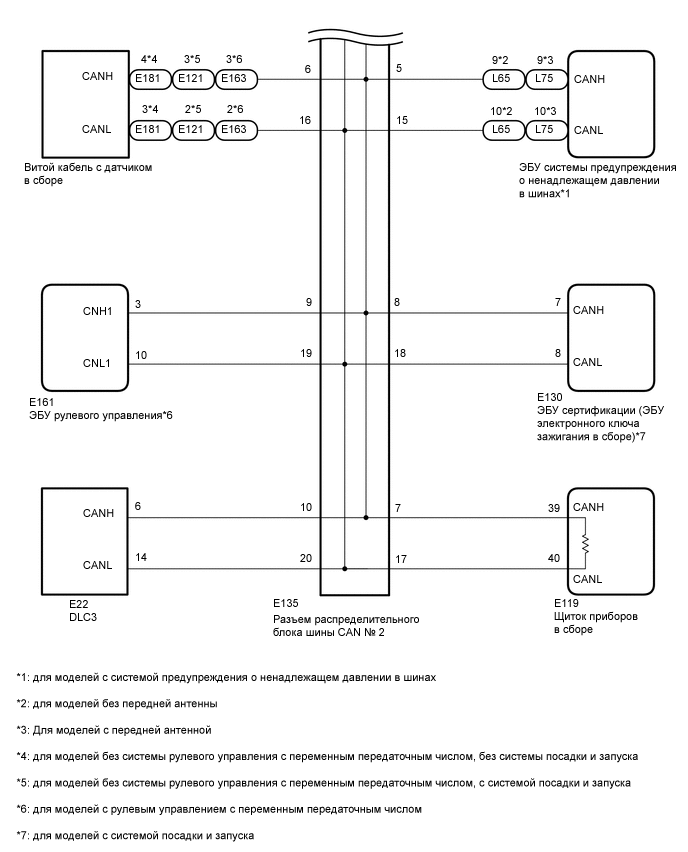 Существует сложная схема счетчиков ошибок, которая гарантирует, что узел не сможет разрушить трафик шины, многократно передавая кадры ошибок.
Существует сложная схема счетчиков ошибок, которая гарантирует, что узел не сможет разрушить трафик шины, многократно передавая кадры ошибок.
Кадр ошибки состоит из флага ошибки, состоящего из 6 битов одного и того же значения (таким образом, нарушается правило заполнения битов), и разделителя ошибок, состоящего из 8 рецессивных битов. Разделитель ошибок обеспечивает некоторое пространство, в котором другие узлы на шине могут отправлять свои флаги ошибок, когда они обнаруживают первый флаг ошибки.
Кадр ошибки
Резюме: «Я очень занят, малыш 82526, не могли бы вы немного подождать?»
Кадр перегрузки упоминается здесь только для полноты картины. Он очень похож на кадр ошибки в отношении формата и передается узлом, который становится слишком занятым. Фрейм перегрузки используется не очень часто, поскольку современные CAN-контроллеры достаточно умны, чтобы не использовать его. Фактически единственным контроллером, который будет генерировать кадры перегрузки, является ныне устаревший 82526.
Первоначально стандарт CAN определял длину идентификатора в поле арбитража до одиннадцати (11) бит. Позже потребительский спрос вынудил расширить стандарт. Новый формат часто называют расширенным CAN, и он допускает не менее двадцати девяти (29) битов в идентификаторе. Чтобы различать два типа кадров, использовался зарезервированный бит в поле управления.
Стандарты официально называются
- 2.0A, только с 11-битными идентификаторами,
- 2.0B, расширенная версия с полными 29-битные идентификаторы (или 11-битные, вы можете их смешивать). Узел 2.0B может быть
- «2.0B active», т.е. может передавать и принимать расширенные кадры, или
- «2.0B пассивный», т.е. он будет молча отбрасывать полученные расширенные кадры (но см. ниже.)
- 1.x относится к исходной спецификации и ее редакциям.
Новые современные контроллеры CAN обычно относятся к типу 2.0B. Контроллер типа 1.x или 2.0A очень расстроится, если получит сообщения с 29арбитражные биты. Контроллер пассивного типа 2.0B будет терпеть их, подтверждать их, если они верны, а затем отбрасывать их; контроллер активного типа 2.0B может как передавать, так и принимать их.
Контроллер пассивного типа 2.0B будет терпеть их, подтверждать их, если они верны, а затем отбрасывать их; контроллер активного типа 2.0B может как передавать, так и принимать их.
Контроллеры, реализующие 2.0B и 2.0A (и 1.x), совместимы и могут использоваться на одной шине, если контроллеры, реализующие 2.0B, воздерживаются от отправки расширенных кадров!
Иногда люди утверждают, что стандартная CAN «лучше», чем расширенная CAN, потому что в сообщениях расширенной CAN больше служебных данных. Это не обязательно правда. Если вы используете поле арбитража для передачи данных, тогда у расширенного CAN могут быть меньшие накладные расходы, чем у стандартного CAN.
Термины «Базовый CAN» и «Полный CAN» берут свое начало из детства CAN. Когда-то существовал CAN-контроллер Intel 82526, который предоставлял программисту интерфейс в стиле DPRAM. Затем появился Philips с 82C200, в котором использовалась модель программирования, ориентированная на FIFO (очередь), и ограниченные возможности фильтрации. Чтобы различать две модели программирования, люди по какой-то причине назвали способ Intel «Full CAN», а способ Philips — «Basic CAN». Сегодня большинство CAN-контроллеров допускают обе модели программирования, поэтому нет причин использовать термины «Полный CAN» и «Базовый CAN» — на самом деле эти термины могут вызвать путаницу, и их следует избегать.
Чтобы различать две модели программирования, люди по какой-то причине назвали способ Intel «Full CAN», а способ Philips — «Basic CAN». Сегодня большинство CAN-контроллеров допускают обе модели программирования, поэтому нет причин использовать термины «Полный CAN» и «Базовый CAN» — на самом деле эти термины могут вызвать путаницу, и их следует избегать.
Конечно, контроллер «Full CAN» может обмениваться данными с контроллером «Basic CAN» и наоборот. Проблем с совместимостью нет.
Арбитраж сообщений (процесс, в котором два или более контроллера CAN договариваются о том, кто будет использовать шину) имеет большое значение для фактически доступной полосы пропускания для передачи данных.
Любой контроллер CAN может начать передачу, если обнаружит свободную шину. Это может привести к тому, что два или более контроллера отправят сообщение (почти) одновременно. Конфликт разрешается следующим образом. Передающие узлы контролируют шину во время отправки. Если узел обнаруживает доминирующий уровень, когда он сам отправляет рецессивный уровень, он немедленно выходит из процесса арбитража и вместо этого становится получателем.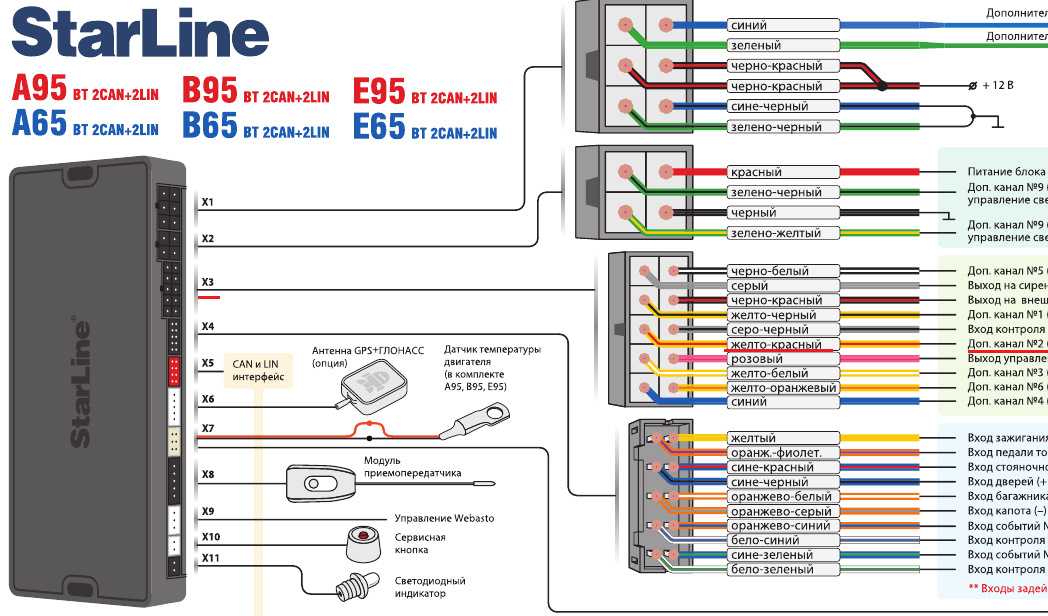 Арбитраж выполняется по всему полю арбитража, и когда это поле отправлено, на шине остается ровно один передатчик. Этот узел продолжает передачу, как будто ничего не произошло. Другие потенциальные передатчики попытаются повторно передать свои сообщения, когда шина станет доступной в следующий раз. В арбитражном процессе не теряется время.
Арбитраж выполняется по всему полю арбитража, и когда это поле отправлено, на шине остается ровно один передатчик. Этот узел продолжает передачу, как будто ничего не произошло. Другие потенциальные передатчики попытаются повторно передать свои сообщения, когда шина станет доступной в следующий раз. В арбитражном процессе не теряется время.
Важным условием успеха этого побитового арбитража является то, что никакие два узла не могут передавать одно и то же поле арбитража. Есть одно исключение из этого правила: если сообщение не содержит данных, то любой узел может передать это сообщение.
Поскольку шина подключена по схеме «и», а доминантный бит логически равен 0, из этого следует, что сообщение с наименьшим числовым полем арбитража выиграет арбитраж.
В: Что произойдет, если узел один на шине и попытается передать?
A: Узел, конечно же, выиграет арбитраж и продолжит передачу сообщения. Но когда придет время подтверждения… ни один узел не отправит доминирующий бит во время интервала ACK, поэтому передатчик обнаружит ошибку ACK, отправит флаг ошибки, увеличит свой счетчик ошибок передачи на 8 и начнет повторную передачу.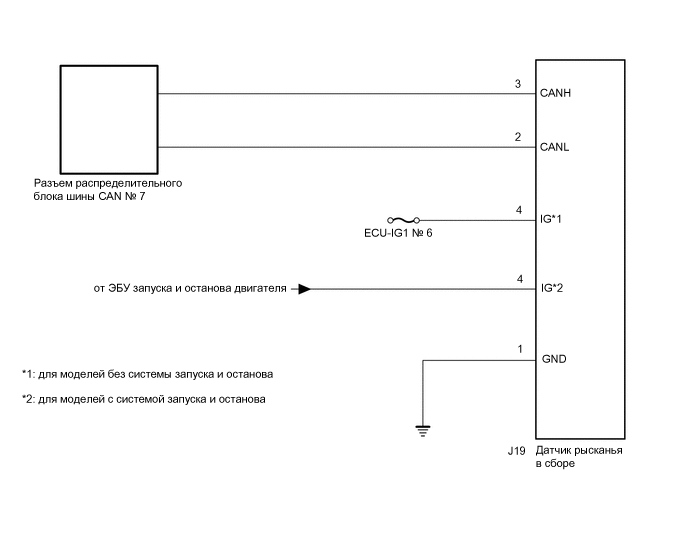 Это произойдет 16 раз; тогда передатчик станет пассивным к ошибкам. По специальному правилу алгоритма ограничения ошибок счетчик ошибок передачи больше не увеличивается, если узел пассивен к ошибкам и ошибка является ошибкой ACK. Таким образом, узел будет продолжать передачу вечно, по крайней мере, до тех пор, пока кто-то не подтвердит сообщение.
Это произойдет 16 раз; тогда передатчик станет пассивным к ошибкам. По специальному правилу алгоритма ограничения ошибок счетчик ошибок передачи больше не увеличивается, если узел пассивен к ошибкам и ошибка является ошибкой ACK. Таким образом, узел будет продолжать передачу вечно, по крайней мере, до тех пор, пока кто-то не подтвердит сообщение.
Стоит еще раз отметить, что в сообщениях CAN нет явного адреса. Каждый CAN-контроллер будет собирать весь трафик на шине и, используя комбинацию аппаратных и программных фильтров, определять, является ли сообщение «интересным» или нет.
На самом деле в CAN нет понятия адресов сообщений. Вместо этого содержимое сообщений идентифицируется идентификатором, который присутствует где-то в сообщении. Сообщения CAN называются «адресованными по содержимому».
Будет использоваться обычный адрес сообщения, например «Вот сообщение для узла X». Сообщение с адресацией по содержимому похоже на «Вот сообщение, содержащее данные с пометкой X».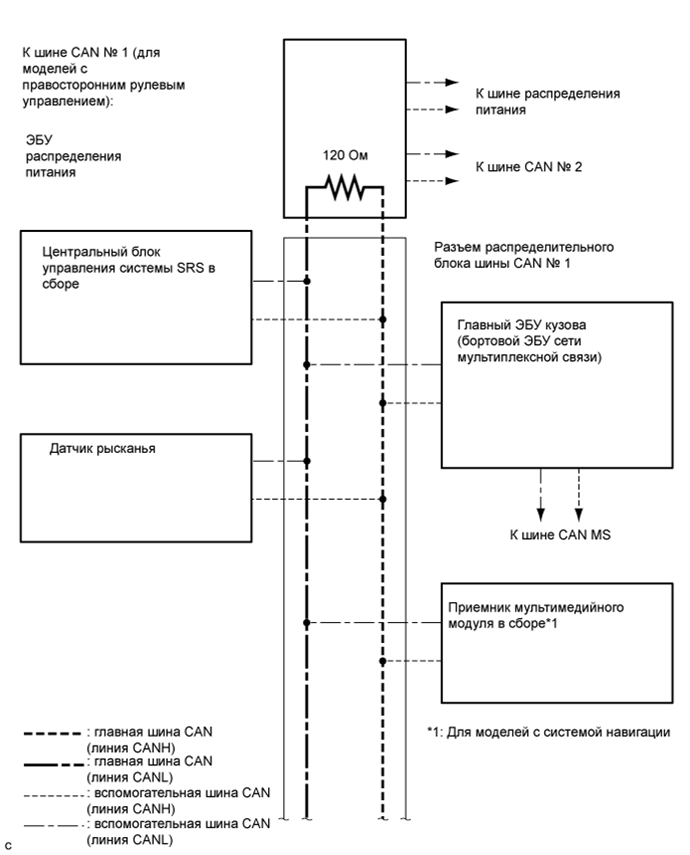 Разница между этими двумя понятиями небольшая, но существенная.
Разница между этими двумя понятиями небольшая, но существенная.
Содержимое поля арбитража согласно стандарту используется для определения приоритета сообщения на шине. Все контроллеры CAN также будут использовать все поле арбитража (некоторые будут использовать только его часть) в качестве ключа в процессе аппаратной фильтрации.
В стандарте не сказано, что поле арбитража должно использоваться в качестве идентификатора сообщения. Тем не менее, это очень распространенное использование.
Мы сказали, что в идентификаторе доступно 11 (CAN 2.0A) или 29 (CAN 2.0B) битов. Это не совсем правильно. Из-за совместимости с каким-то старым CAN-контроллером (угадайте, с каким?) идентификаторы не должны иметь 7 старших битов, установленных на все единицы, поэтому для 11-битных идентификаторов оставляются только идентификаторы 0..2031, а пользователь 29-битные идентификаторы могут использовать 532676608 различных значений.
Обратите внимание, что все остальные CAN-контроллеры принимают «незаконные» идентификаторы, поэтому в современной CAN-системе идентификаторы 2032. .2047 можно использовать без ограничений.
.2047 можно использовать без ограничений.
Шина CAN использует невозврат к нулю (NRZ) с вставкой битов. Существует два разных состояния сигнализации: доминантное (логически 0) и рецессивное (логически 1). Они соответствуют определенным электрическим уровням, которые зависят от используемого физического уровня (их несколько). Модули подключаются к шине проводным способом: если только один узел переводит шину в доминирующее состояние, то вся шина находится в этом состоянии независимо от количества узлов, передающих рецессивное состояние.
Физический уровень определяет электрические уровни и схему сигнализации на шине, импеданс кабеля и тому подобное.
Существует несколько различных физических уровней:
- Наиболее распространенный тип определяется стандартом CAN, частью ISO 11898-2, и представляет собой двухпроводную симметричную схему передачи сигналов. Его также иногда называют «высокоскоростной CAN».
- Другая часть того же стандарта ISO, ISO 11898-3, определяет другую двухпроводную симметричную схему сигнализации для более низких скоростей шины.
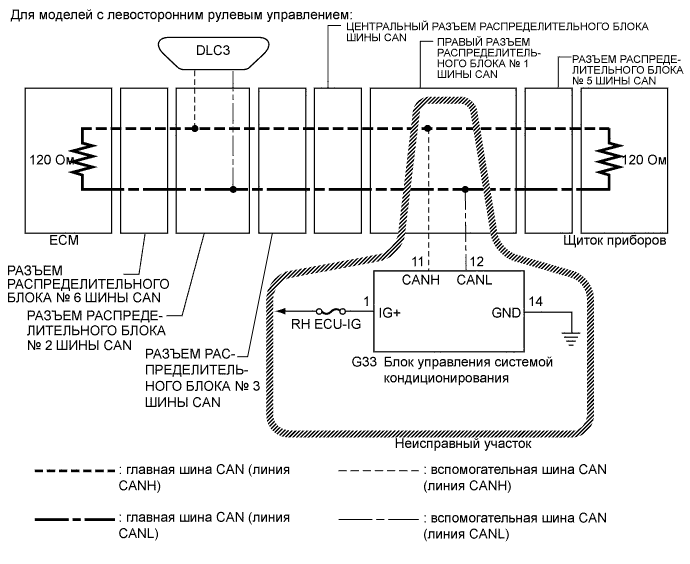 Он отказоустойчив, поэтому сигнализация может продолжаться, даже если один провод шины обрезан или замкнут на массу или Vbat. Иногда его называют «низкоскоростным CAN».
Он отказоустойчив, поэтому сигнализация может продолжаться, даже если один провод шины обрезан или замкнут на массу или Vbat. Иногда его называют «низкоскоростным CAN». - SAE J2411 определяет физический уровень с одним проводом (плюс заземление, конечно). Он используется в основном в автомобилях. GM-LAN.
- Существует несколько проприетарных физических уровней.
- Модификации RS485 использовались в старые времена, когда не существовало драйверов CAN.
- Перейдите на страницу 6, чтобы просмотреть несколько осциллографических изображений для тех, кто интересуется подробностями сообщения.
Различные физические уровни, как правило, не могут взаимодействовать. Некоторые комбинации могут работать или, по-видимому, работать в хороших условиях. Например, использование как «высокоскоростных», так и «низкоскоростных» приемопередатчиков на одной шине может работать… иногда.
Компания NXP производит очень много микросхем приемопередатчиков CAN; альтернативные поставщики включают Bosch, Infineon, Texas Instruments и Vishay Siliconix.
Очень распространенным типом является приемопередатчик 82C250, реализующий физический уровень, определенный стандартом ISO 11898. 82C251 представляет собой улучшенную версию.
Распространенным приемопередатчиком для «низкоскоростного CAN» является TJA1054 от NXP.
Максимальная скорость шины CAN по стандарту составляет 1 Мбит/сек. Тем не менее, некоторые CAN-контроллеры могут работать на скоростях выше 1 Мбит/с и могут рассматриваться для специальных приложений.
Низкоскоростная CAN (ISO 11898-3, см. выше) может достигать 125 кбит/с.
Однопроводная CAN может развивать скорость до 50 кбит/с в стандартном режиме, а при использовании специального высокоскоростного режима, используемого, например. для программирования ЭБУ, примерно до 100 кбит/с.
Имейте в виду, что некоторые приемопередатчики шины не позволяют снизить скорость передачи ниже определенной. Например, используя 82C250 или 82C251, вы можете без проблем снизить скорость до 10 кбит/с, но если вместо этого вы используете TJA1050, вы не сможете снизить скорость ниже 50 кбит/с.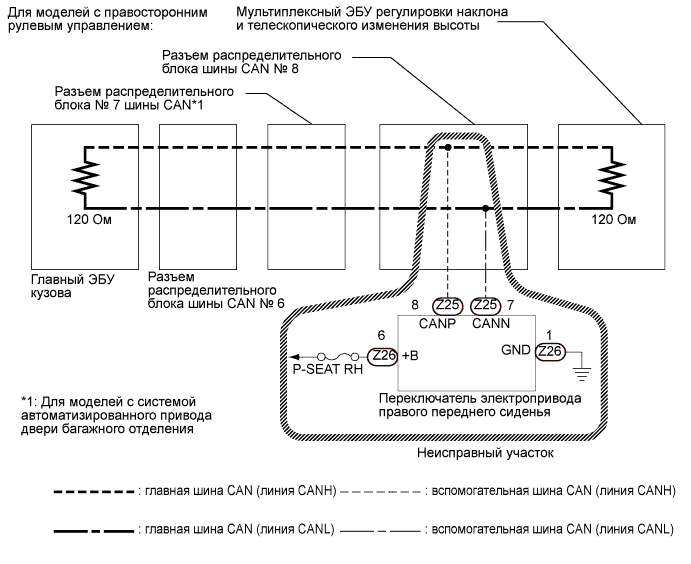 Проверьте лист данных.
Проверьте лист данных.
При скорости 1 Мбит/с можно использовать кабель максимальной длины около 40 метров (130 футов). Это связано с тем, что схема арбитража требует, чтобы волновой фронт сигнала мог распространяться до самого удаленного узла и обратно до того, как будет произведена выборка бита. Другими словами, длина кабеля ограничена скоростью света. Предложение увеличить скорость света рассматривалось, но было отклонено из-за его межгалактических последствий.
Другие максимальные длины кабеля (данные значения являются приблизительными):
- 100 метров (330 футов) при скорости 500 кбит/с
- 200 метров (650 футов) при 250 кбит/с
- 500 метров (1600 футов) при 125 кбит/с
- 6 километров (20000 футов) при скорости 10 кбит/с
Если для обеспечения гальванической развязки используются оптопары, максимальная длина шины соответственно уменьшается. Подсказка: используйте быстрые оптопары и смотрите на задержку через устройство, а не на указанный максимальный битрейт.
Шина CAN ISO 11898 должна быть терминирована. Это делается с помощью резистора 120 Ом на каждом конце шины. Прекращение служит двум целям:
- Удалите отражения сигнала на конце шины.
- Убедитесь, что шина получает правильные уровни постоянного тока.
Шина CAN ISO 11898 всегда должна быть оконечной, независимо от ее скорости. Я повторю: CAN-шина ISO 11898 всегда должна быть терминирована, независимо от ее скорости. Для лабораторной работы может хватить одного терминатора. Если ваша CAN-шина работает, даже если вы не поставили на нее никаких терминаторов, вам просто повезло.
Обратите внимание, что другие физические уровни, такие как «низкоскоростная CAN», однопроводная CAN и другие, могут требовать или не требовать оконечной нагрузки. Но твой ванильный высокоскоростной ISO 11898 Шина CAN всегда требует хотя бы одного терминатора.
Узнайте больше о терминации CANbus в этой статье.
Стандарт ISO 11898 предписывает номинальный импеданс кабеля 120 Ом, но допускается импеданс в интервале [108. .132] Ом.
.132] Ом.
Сегодня на рынке имеется не так много кабелей, отвечающих этому требованию. Есть большая вероятность, что допустимый интервал импеданса будет расширен в будущем.
ISO 11898 определен для кабеля с витой парой, экранированного или неэкранированного. Ведется работа над однопроводным стандартом SAE J2411.
Для разъемов шины CAN вообще не существует стандарта! Обычно каждый протокол более высокого уровня (!) определяет один или несколько предпочтительных типов разъемов шины CAN. Общие типы включают 9-контактный DSUB
- , предложенный CiA.
- 5-контактный Mini-C и/или Micro-C, используемый DeviceNet и SDS.
- 6-контактный разъем Deutch, предложенный CANHUG для мобильной гидравлики. Перейдите на страницу 7, чтобы просмотреть несколько различных схем разъемов.
Вот картинка с совершенно нормального ISO 11898 CAN-шина, работающая на скорости 1 Мбит/с. Приемопередатчик — 82C251; другими словами, физический уровень соответствует стандарту ISO 11898.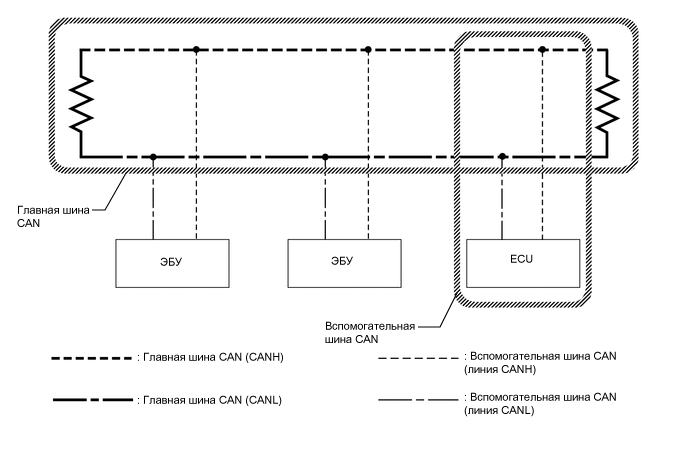
Измерение проводилось между CAN_H и GND. Обратите внимание, что напряжения покоя и рецессивной шины составляют около 2,5 В. Когда передается доминантный бит, напряжение возрастает примерно до 3,5 В.
Теперь та же шина, но вместо этого измерение выполняется между CAN_L и GND.
Вот еще одно сообщение, отправленное на скорости 125 кбит/с. Идентификатор сообщения (11-битный) равен 300 или 12c в шестнадцатеричном формате. Посмотрите внимательно, и вы сможете идентифицировать первые биты в сообщении.
Вот более сложная картина. Он показывает то же сообщение, что и выше, по-прежнему (11-битный) идентификатор 300 и по-прежнему 125 кбит/с, но без завершения на шине CAN . Кабель CAN представлял собой короткий плоский ленточный кабель.
Итак, что происходит? Это 125 кбит/с, поэтому один бит равен 8 микросекундам.
- Сначала передатчик отправляет стартовый бит. Это логический «0», то есть доминирующий уровень.
- Затем передается идентификатор.
 Десятичное число 300 равно 12c в шестнадцатеричном формате или 001 0010 1100 в двоичном. Первые два нуля передаются нормально. Это объясняет 24 микросекунды доминирующего уровня, как видно на рисунке.
Десятичное число 300 равно 12c в шестнадцатеричном формате или 001 0010 1100 в двоичном. Первые два нуля передаются нормально. Это объясняет 24 микросекунды доминирующего уровня, как видно на рисунке. - Затем должна быть передана ‘1’, но поскольку шина не завершена, нарастающий фронт не тот, что должен был быть. Передающий узел теперь будет думать, что он увидел «0» на шине.
- Поскольку это происходит во время фазы арбитража, передатчик прекращает передачу — он думает, что какой-то другой узел ведет передачу. Шина теперь останется рецессивной, потому что на самом деле никто не передает.
- После 6 рецессивных битов и передатчик, и приемники обнаружат заполняет ошибку и начинается обработка ошибок. К этому моменту прошло 80 микросекунд (один стартовый бит, два «0», один неверно истолкованный бит и шесть рецессивных битов — всего 10 бит = 80 микросекунд).
- Все узлы, обнаружившие ошибку заполнения, теперь начнут передавать кадр ошибки.
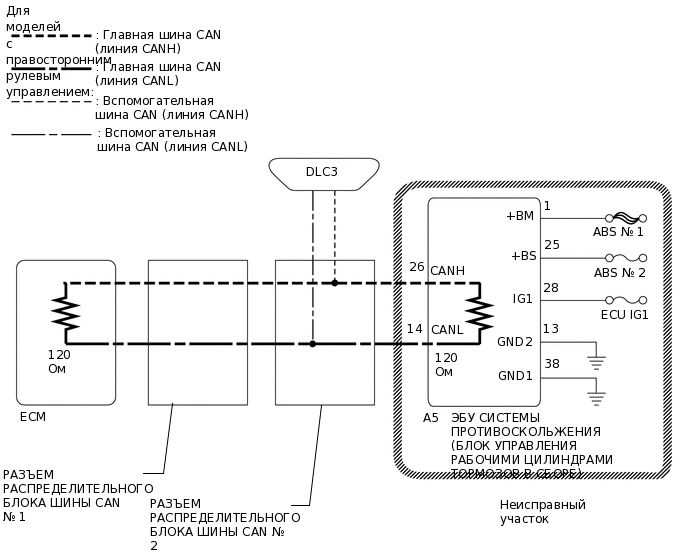 В этом случае кадр ошибки пассивный , потому что до того, как было захвачено изображение выше, было сгенерировано несколько ошибок, поэтому передатчик имеет пассивный ошибки . Пассивный кадр ошибки аналогичен активному кадру ошибки, но он передается с рецессивным уровнем и поэтому не отображается на шине.
В этом случае кадр ошибки пассивный , потому что до того, как было захвачено изображение выше, было сгенерировано несколько ошибок, поэтому передатчик имеет пассивный ошибки . Пассивный кадр ошибки аналогичен активному кадру ошибки, но он передается с рецессивным уровнем и поэтому не отображается на шине. - Пассивный кадр ошибки преобладает в течение 6 битов.
- Затем все узлы ожидают период из 8 рецессивных битов, называемый разделителем ошибок .
- Затем все узлы ожидают период в 3 рецессивных бита, называемый паузой .
- Суммируя числа выше, получаем 1+6+6+8+3 = 24 рецессивных бита = 192 микросекунды (см. рисунок!).
Мораль: Всегда терминируйте шину CAN! Отражения не обязательно будут мешать, но плохая форма краев убьет связь.
Вот та же шина CAN в другой шкале времени. Шина CAN имела длину около 2 дециметров (8 дюймов). Недолет и звон видны, но в данном случае явно не существенны. На этот раз виноват медленный нарастающий фронт.
На этот раз виноват медленный нарастающий фронт.
Здесь та же установка, но на этот раз и передатчик, и приемник активны с ошибкой.
Что происходит?
- Как и на рисунке выше, передаются три «0» (занимает 24 микросекунды), а следующий бит интерпретируется неправильно, поэтому передатчик считает, что он проиграл арбитраж.
- Передатчик ожидает 6 бит, а затем обнаруживает ошибку заполнения. Неверно истолкованный бит и 6 бит занимают 56 микросекунд.
- Теперь передатчик и приемник начинают передавать кадр ошибки. Это 6 доминантных бит (48 микросекунд)
- Узлы, которые передали фрейм ошибки, теперь ожидают 8 рецессивных битов, но поскольку нарастающий фронт плохой, первый бит интерпретируется неправильно. Узлы будут думать, что это другой узел, передающий кадр ошибки, и проигнорируют его.
- Когда шина возвращается на рецессивный уровень, все узлы ждут 8 бит.
- Затем наступает пауза в 3 рецессивных бита.
- 3+9 = 12 бит = 96 микросекунд, как показано на рисунке.

- Затем передатчик пытается снова с тем же результатом. Через некоторое время передатчик перейдет в пассивное состояние при ошибках и будет вести себя так, как описано ранее.
Вот еще одна картинка. В этой конфигурации есть только один узел на (правильно завершенной) шине CAN. Он пытается передать сообщение, но его никто не слушает.
Так что же происходит?
- Сначала передатчик отправляет сообщение целиком.
- Передатчик ожидает доминирующий уровень в слоте ACK, но поскольку никто не слушает, ACK не поступает, поэтому передатчик обнаруживает ошибку подтверждения.
- Затем передатчик передает пассивный флаг ошибки (пассивный, потому что на картинке выше он пытался отправить в течение нескольких секунд, поэтому он больше не является активным с ошибкой.)
- За флагом пассивной ошибки следует разделитель ошибок и пауза.
- Поскольку этот узел попытался отправить сообщение, но не удалось, ему нужно подождать еще 8 бит, прежде чем начать новую передачу.
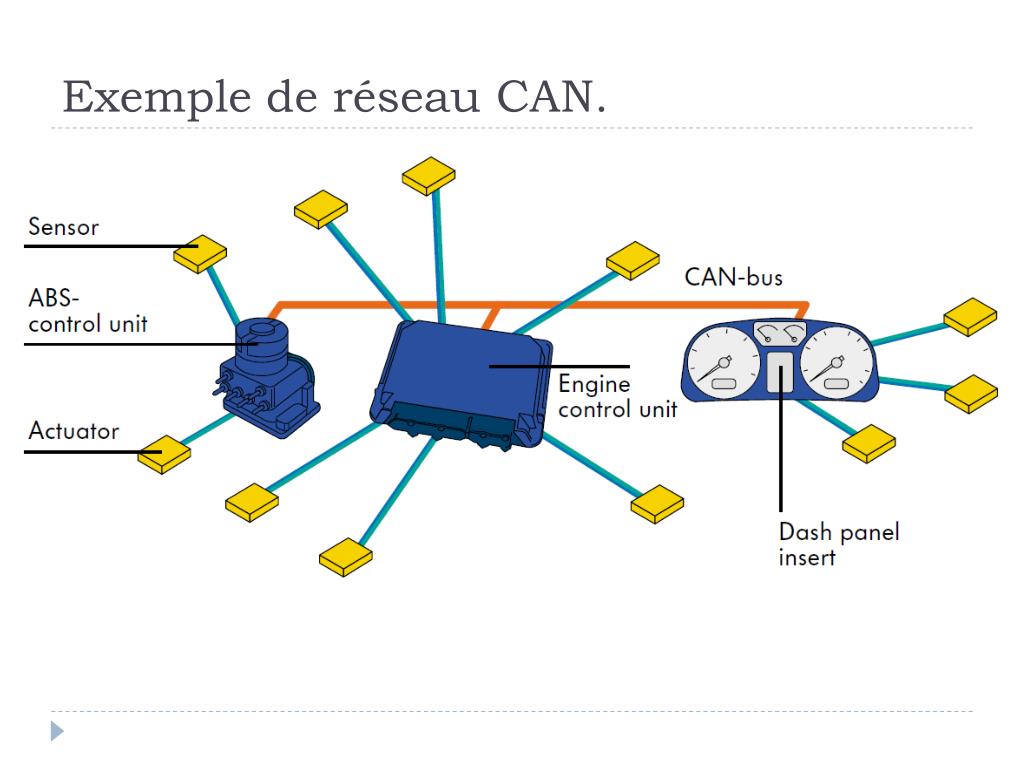 В спецификации CAN это называется «приостановить передачу».
В спецификации CAN это называется «приостановить передачу». - Передающий узел также должен увеличить свой счетчик ошибок передачи на 8, но в соответствии с особым случаем в спецификации CAN это происходит только до тех пор, пока передатчик активен с ошибкой. Когда передатчик становится пассивным к ошибкам, он не будет (в этом случае) увеличивать свой счетчик ошибок передачи, и, следовательно, передача повторяется навсегда.
Итак, то, что вы видите на картинке выше, — это передаваемое сообщение, за которым следует небольшая пауза, которая представляет собой сумму флага ошибки, разделителя ошибок, паузы и приостановки передачи. Затем сообщение передается снова и снова, и…
Эта схема разъема рекомендована CiA и в значительной степени соответствует промышленному стандарту .
Если питание подается, оно должно быть в диапазоне +7..+13 В, 100 мА. Модули имеют штыревой разъем и должны соединять контакты 3 и 6 внутри.
Нумерация контактов действительна для штекерного разъема, если смотреть со стороны разъема, или для гнездового разъема, если смотреть со стороны пайки. – Чтобы запомнить распиновку, обратите внимание, что CAN_LOW имеет НИЗКИЙ номер контакта, а CAN_HIGH имеет ВЫСОКИЙ номер контакта.
– Чтобы запомнить распиновку, обратите внимание, что CAN_LOW имеет НИЗКИЙ номер контакта, а CAN_HIGH имеет ВЫСОКИЙ номер контакта.
Используется как DeviceNet, так и SDS и оказывается совместимым между этими двумя протоколами.
Модули имеют штекерные разъемы. Подаваемая мощность 24В +- 1%.
Примечание: в спецификации DeviceNet версии 1.x гнездовой разъем на рис. 9.13 имеет номера в неправильном порядке. Спецификация 2.0 и более поздние версии сделали это правильно.
Рекомендовано CANHUG для использования в мобильной гидравлике.
Со стороны модуля вилка, со стороны шины гнездо. В настоящее время нет рекомендаций относительно подаваемой мощности.
Каждый бит на шине CAN для целей синхронизации делится как минимум на 4 кванта. Кванты логически разделены на четыре группы или сегмента:
- Сегмент синхронизации
- Сегмент распространения
- Фаза Сегмент 1
- Фаза Сегмент 2
Вот изображение бита данных CAN.
Сегмент синхронизации, длина которого всегда составляет один такт, используется для синхронизации часов. Здесь ожидается битовый фронт, когда данные на шине изменяются.
Сегмент распространения необходим для компенсации задержки в линиях шины.
Сегменты фазы могут быть укорочены (сегмент фазы 1) или удлинены (сегмент фазы 2), если это необходимо для синхронизации часов. Уровни шины замеряются на границе между Phase Segment 1 и Phase Segment 2.
Большинство контроллеров CAN также предоставляют возможность трехкратной выборки в течение бита. В этом случае выборка происходит на границах двух квантов, предшествующих точке выборки, а результат подвергается мажоритарному декодированию (по крайней мере, так для 82527).
Для настройки тактовой частоты встроенной шины CAN-контроллер может укорачивать или увеличивать длину бита на целое число квантов. Максимальное значение этих корректировок битового времени называется шириной перехода синхронизации, SJW.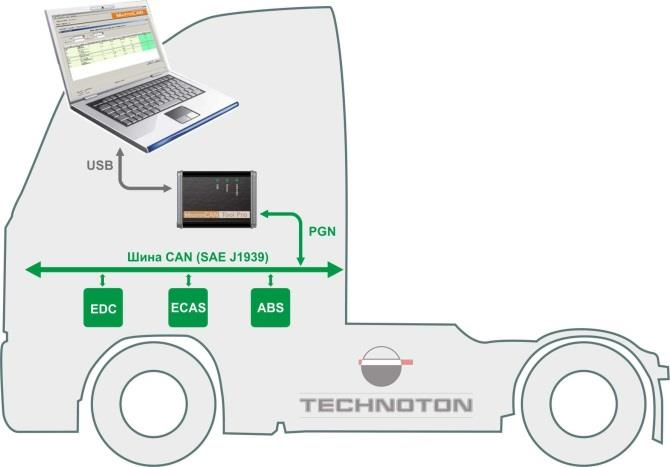
Жесткая синхронизация происходит при переходе начального бита от рецессивного к доминантному. Битовое время перезапускается с этого фронта.
Ресинхронизация происходит, когда в сегменте синхронизации в сообщении не возникает фронта бита. Один из сегментов фазы укорачивается или удлиняется на величину, которая зависит от фазовой ошибки в сигнале; максимальное количество, которое может быть использовано, определяется параметром Synchronization Jump Width.
Большинство контроллеров CAN позволяет программисту устанавливать синхронизацию битов, используя следующие параметры:
- Значение предделителя часов
- Количество квантов до точки выборки
- Количество квантов после точки дискретизации
- Количество квантов в Synchronization Jump Width , SJW
Обычно для этой цели предусмотрены два регистра: btr0 и btr1. Однако у разных контроллеров все немного различается, поэтому внимательно читайте спецификации.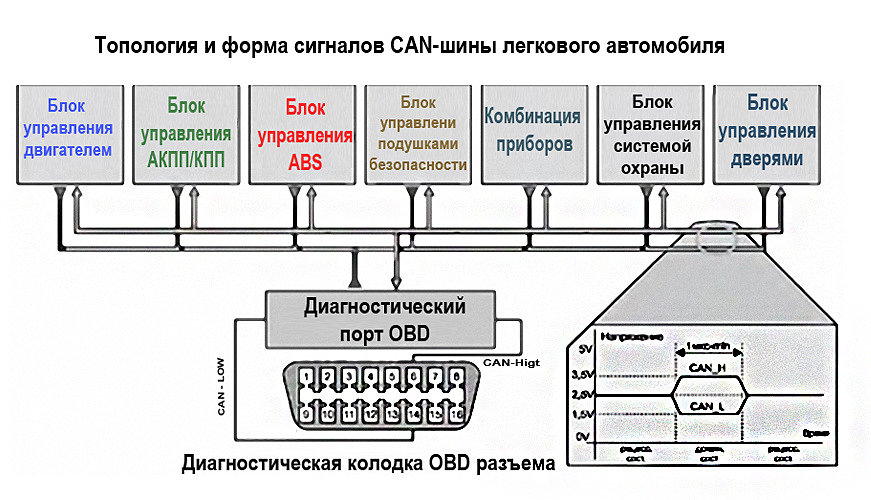
На 82c200 и SJA1000, оба производства NXP (ранее Philips), расположение регистров выглядит следующим образом:
- BRP0..BRP5 устанавливает значение предделителя часов
- SJW0..SJW1 устанавливает длину SJW
- TSEG10..TSEG13 устанавливает количество квантов до точки выборки (стартовый бит не включен)
- TSEG20..TSEG22 устанавливает количество квантов после точки выборки.
- SAM устанавливается на 1, если необходимо получить три образца, и на 0, если достаточно одного образца.
Примечание: фактическое значение этих параметров на единицу больше, чем значение, записанное в регистр.
Пример: если сигнал генератора, подаваемый на SJA1000, имеет частоту 16 МГц, и нам нужна скорость передачи данных 250 кбит/с, с точкой дискретизации, близкой к 62% всего бита, и SJW из 2 квантов, мы можно задать:
BRP = 4, что дает длину кванта 2 * 4/16000000 s = 500 нс, и
TSEG1 = 5, что дает 5 квантов до точки выборки, и
TSEG2 = 3, что дает 3 кванта после точки отбора проб.
- BRP0..BRP5 устанавливает значение предделителя часов
- SJW0..SJW1 устанавливает длину SJW
- TSEG10..TSEG13 устанавливает количество квантов до точки выборки (стартовый бит не включен)
- TSEG20..TSEG22 устанавливает количество квантов после точки выборки.
- SAM устанавливается на 1, если необходимо получить три образца, и на 0, если достаточно одного образца.
Примечание: фактическое значение этих параметров на единицу больше, чем значение, записанное в регистр.
Пример: если сигнал генератора, подаваемый на SJA1000, имеет частоту 16 МГц, и нам нужна скорость передачи данных 250 кбит/с, с точкой дискретизации, близкой к 62% всего бита, и SJW из 2 квантов, мы можно задать:
BRP = 4, что дает длину кванта 2 * 4/16000000 s = 500 нс, и
TSEG1 = 5, что дает 5 квантов до точки выборки, и
TSEG2 = 3, что дает 3 кванта после точки отбора проб.
В этом случае каждый бит будет состоять из 5 + 3 = 8 квантов, что дает желаемую скорость передачи 1 / (8 * 500 нс) = 250 кбит/с. Значения регистров должны быть такими, как показано в примере здесь.
Значения регистров должны быть такими, как показано в примере здесь.
Точка выборки находится на уровне 5/8 = 62,5% бита.
| бтр0 = | (SJW – 1) * 64 + (BRP -1) = (2-1)*64 + (4-1) = 67 = 0×43 |
| бтр1 = | SAM * 128 + (TSEG2 – 1)* 16 + (TSEG1 – 1) = 0*128 + (3-1)*16 + (4-1) = («4″, потому что начальный бит не включено) 35 = 0×23 |
Обработка ошибок встроена в протокол CAN и имеет большое значение для производительности системы CAN. Обработка ошибок направлена на обнаружение ошибок в сообщениях, появляющихся на шине CAN, чтобы передатчик мог повторно передать ошибочное сообщение. Каждый контроллер CAN на шине попытается обнаружить ошибки в сообщении. Если обнаружена ошибка, обнаруживающий узел передаст флаг ошибки, тем самым уничтожая трафик шины. Другие узлы обнаружат ошибку, вызванную флагом ошибки (если они еще не обнаружили исходную ошибку), и предпримут соответствующие действия, т. е. отменят текущее сообщение.
е. отменят текущее сообщение.
Каждый узел поддерживает два счетчика ошибок: счетчик ошибок передачи и счетчик ошибок приема. Существует несколько правил, определяющих, как эти счетчики увеличиваются и/или уменьшаются. По сути, передатчик, обнаруживший ошибку, увеличивает свой счетчик ошибок передачи быстрее, чем прослушивающие узлы увеличивают свой счетчик ошибок приема. Это потому, что есть большая вероятность, что виноват передатчик! Когда какой-либо счетчик ошибок превышает определенное значение, узел сначала становится «пассивным к ошибкам», то есть он не будет активно уничтожать трафик шины при обнаружении ошибки, а затем «выключается», что означает, что узел не вообще не участвуйте в автобусном движении.
Используя счетчики ошибок, узел CAN может не только обнаруживать неисправности, но и выполнять локализацию ошибок.
Протокол CAN определяет не менее пяти различных способов обнаружения ошибок. Два из них работают на уровне битов, а остальные три — на уровне сообщений.
- Мониторинг битов.
- Битовая начинка.
- Проверка кадра.
- Проверка подтверждения.
- Проверка циклическим избыточным кодом.
Контроль битов
Каждый передатчик на шине CAN отслеживает (т. е. считывает) уровень передаваемого сигнала. Если фактически считанный битовый уровень отличается от передаваемого, выдается сообщение об ошибке бита. (Во время арбитражного процесса битовые ошибки не возникают.)
Вставка битов
Когда пять последовательных битов одного уровня были переданы узлом, он добавит шестой бит противоположного уровня к исходящему битовому потоку. Получатели удалят этот лишний бит. Это сделано для того, чтобы избежать чрезмерного количества компонентов постоянного тока на шине, но это также дает получателям дополнительную возможность обнаруживать ошибки: если на шине появляется более пяти последовательных битов одного уровня, сигнализируется Stuff Error.
Проверка кадра
Некоторые части сообщения CAN имеют фиксированный формат, т.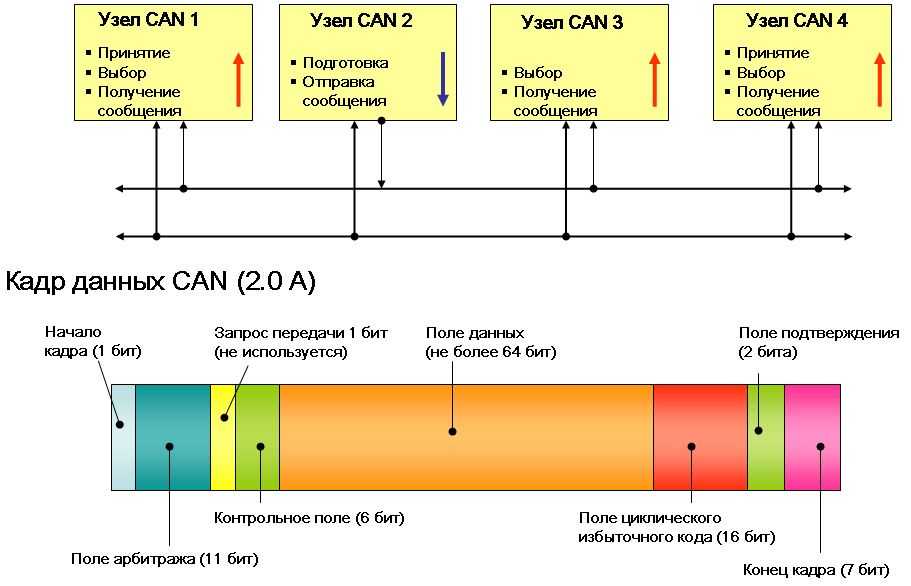 е. стандарт точно определяет, какие уровни должны возникать и когда. (Этими частями являются CRC Delimiter, ACK Delimiter, End of Frame, а также Intermission, но для этого существуют дополнительные специальные правила проверки ошибок.) Если контроллер CAN обнаруживает недопустимое значение в одном из этих фиксированных полей, форма Сигнализируется ошибка.
е. стандарт точно определяет, какие уровни должны возникать и когда. (Этими частями являются CRC Delimiter, ACK Delimiter, End of Frame, а также Intermission, но для этого существуют дополнительные специальные правила проверки ошибок.) Если контроллер CAN обнаруживает недопустимое значение в одном из этих фиксированных полей, форма Сигнализируется ошибка.
Проверка подтверждения
Ожидается, что все узлы на шине, которые правильно принимают сообщение (независимо от того, «заинтересованы» они в его содержании или нет), отправят доминирующий уровень в так называемом слоте подтверждения в сообщении. Здесь передатчик будет передавать рецессивный уровень. Если передатчик не может обнаружить доминирующий уровень в слоте ACK, сигнализируется ошибка подтверждения.
Проверка циклическим избыточным кодом
Каждое сообщение содержит 15-битную контрольную сумму циклического избыточного кода (CRC), и любой узел, обнаруживший в сообщении CRC, отличный от того, который он вычислил сам, будет сигнализировать об ошибке CRC .
Каждый контроллер CAN на шине попытается обнаружить описанные выше ошибки в каждом сообщении. Если обнаружена ошибка, обнаруживающий узел передаст флаг ошибки, тем самым уничтожая трафик шины. Другие узлы обнаружат ошибку, вызванную флагом ошибки (если они еще не обнаружили исходную ошибку), и предпримут соответствующие действия, т. е. отменят текущее сообщение.
Каждый узел поддерживает два счетчика ошибок: счетчик ошибок передачи и счетчик ошибок приема. Существует несколько правил, определяющих, как эти счетчики увеличиваются и/или уменьшаются. По сути, передатчик, обнаруживший ошибку, увеличивает свой счетчик ошибок передачи быстрее, чем прослушивающие узлы увеличивают свой счетчик ошибок приема. Это потому, что есть большая вероятность, что виноват передатчик!
Узел запускается в режиме Error Active. Когда значение любого из двух счетчиков ошибок превышает 127, узел переходит в состояние, известное как пассивная ошибка, а когда значение счетчика ошибок передачи превышает 255, узел переходит в состояние отключения шины.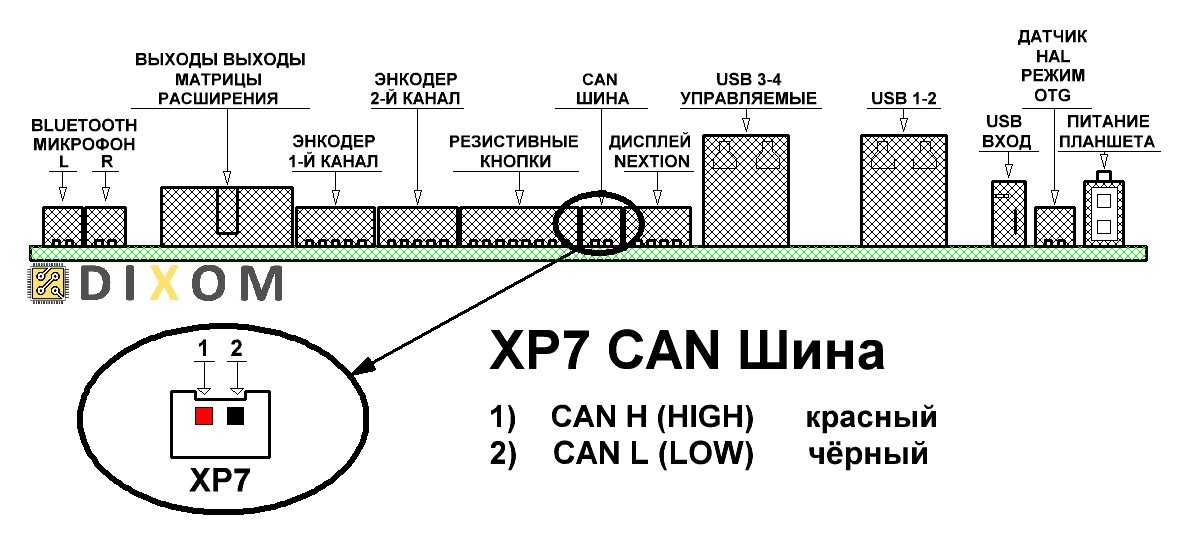
- Узел Error Active будет передавать флаги Active Error при обнаружении ошибок.
- Узел Passive Error будет передавать флаги Passive Error при обнаружении ошибок.
- Узел с отключенной шиной вообще ничего не будет передавать по шине.
Правила увеличения и уменьшения счетчиков ошибок несколько сложны, но принцип прост: ошибки передачи дают 8 баллов ошибки, а ошибки приема дают 1 балл ошибки. Корректно переданные и/или принятые сообщения приводят к уменьшению счетчика(ов).
Пример (слегка упрощенный): Предположим, что у узла А в автобусе плохой день. Всякий раз, когда A пытается передать сообщение, это не удается (по какой-либо причине). Каждый раз, когда это происходит, он увеличивает свой счетчик ошибок передачи на 8 и передает активный флаг ошибки. Затем он попытается повторно передать сообщение… и произойдет то же самое.
Когда значение счетчика ошибок передачи превышает 127 (т. е. после 16 попыток), узел A переходит в состояние пассивной ошибки.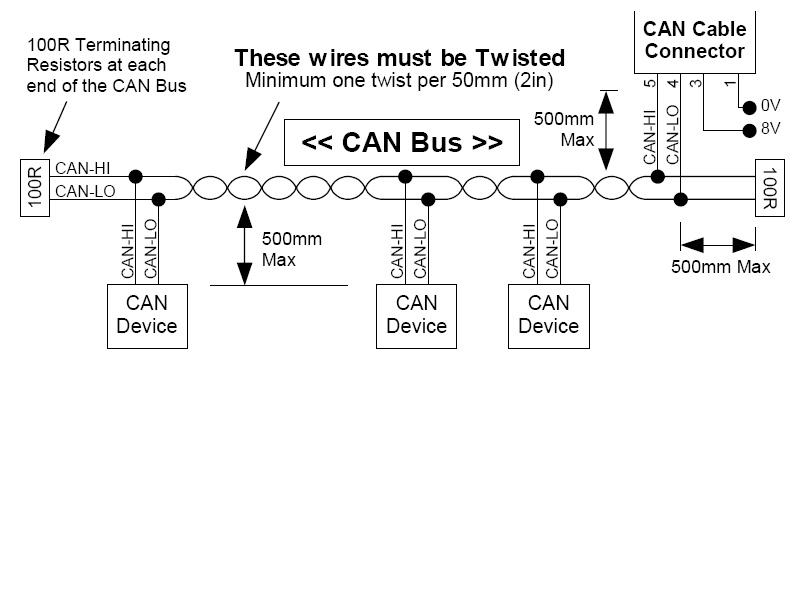 Разница в том, что теперь он будет передавать по шине пассивные флаги ошибок. Пассивный флаг ошибки состоит из 6 рецессивных битов и не уничтожает другой трафик шины, поэтому другие узлы не услышат сообщение А об ошибках шины. Однако А продолжает увеличивать свой счетчик ошибок передачи. Когда он поднимается выше 255, узел A, наконец, сдается и отключается.
Разница в том, что теперь он будет передавать по шине пассивные флаги ошибок. Пассивный флаг ошибки состоит из 6 рецессивных битов и не уничтожает другой трафик шины, поэтому другие узлы не услышат сообщение А об ошибках шины. Однако А продолжает увеличивать свой счетчик ошибок передачи. Когда он поднимается выше 255, узел A, наконец, сдается и отключается.
Что другие узлы думают об узле А? – Для каждого активного флага ошибки, переданного A, другие узлы будут увеличивать свои счетчики ошибок приема на 1. К тому времени, когда A перейдет в состояние отключения шины, счетчики ошибок приема других узлов будут значительно ниже предела для Error Passive, т.е. 127. Это количество будет уменьшаться на единицу для каждого правильно принятого сообщения. Однако узел A останется отключенным от шины.
Большинство контроллеров CAN предоставляют биты состояния (и соответствующие прерывания) для двух состояний:
- «Предупреждение об ошибке» — один или оба счетчика ошибок выше 96
- Bus Off, как описано выше.
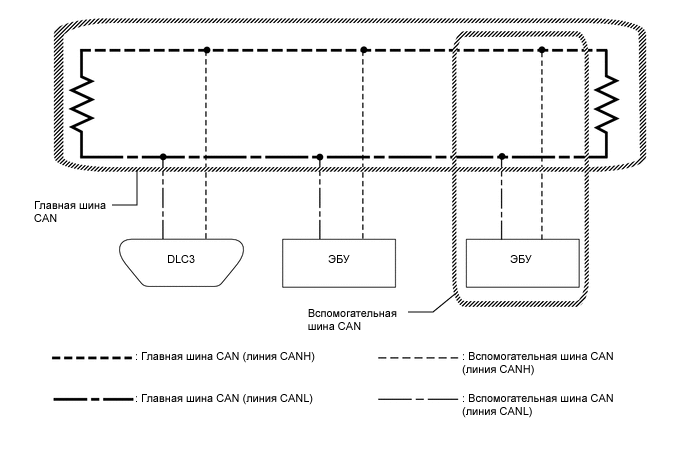
Некоторые, но не все! – контроллеры также предоставляют бит для состояния Error Passive. Некоторые контроллеры также обеспечивают прямой доступ к счетчикам ошибок.
Привычка контроллера CAN автоматически повторно передавать сообщения при возникновении ошибок может иногда раздражать. На рынке есть по крайней мере один контроллер (SJA1000 от Philips), который позволяет полностью управлять обработкой ошибок вручную.
Стандарт ISO 11898 перечисляет несколько режимов отказа кабеля шины CAN:
- CAN_H прерван
- CAN_L прерван
- CAN_H замкнут на напряжение аккумулятора
- CAN_L замкнут на массу
- CAN_H замкнут на массу
- CAN_L замкнут на напряжение аккумулятора
- CAN_L замкнут на провод CAN_H
- CAN_H и CAN_L прерваны в одном месте
- Потеря соединения с оконечной сетью
При отказах 1-6 и 9 «рекомендуется» сохранить шину с уменьшенным отношением сигнал/шум, а при отказе 8 — сохранить результирующую подсистему.