
Регулятор холостого хода ВАЗ 2114 – принцип работы + Видео » АвтоНоватор
РХХ – регулятор холостого хода ВАЗ 2114, который также нередко называют датчиком, выполняет функции по регулированию в автоматическом режиме и стабилизации холостого хода.
Общая информация о регуляторе
Описываемый датчик холостого хода представляет собой один из ключевых компонентов двигателя автомобиля, который обеспечивает вместе с другими устройствами бесперебойное и слаженное функционирование всего «организма» транспортного средства.
Располагается РХХ на дроссельном узле, а точнее – на его корпусе.
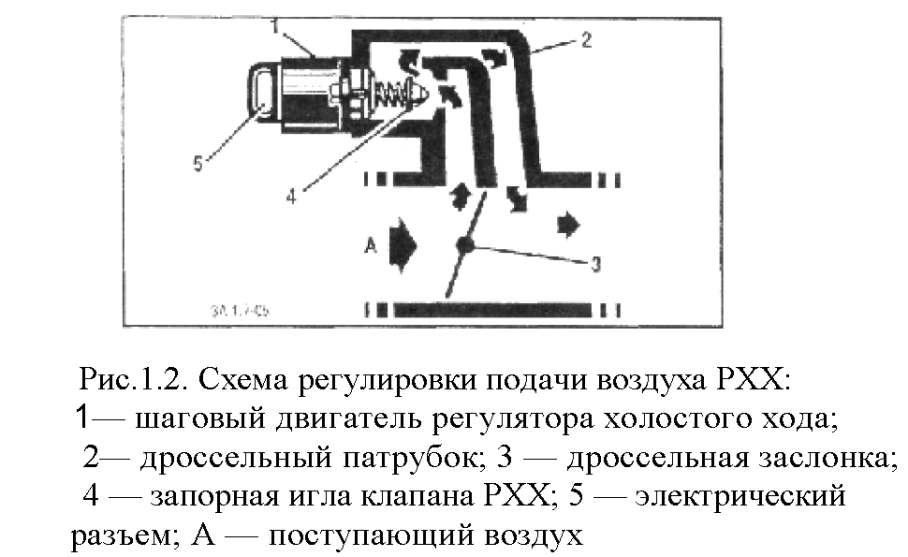
Регулятор холостого хода ВАЗ 2114 – принцип работы
Находящийся на РХХ шток при включении водителем зажигания автомобиля выдвигается на всю свою длину, а затем упирается в калибровочное специальное отверстие, которое располагается в дроссельном патрубке. После того, как регулятор отметит определенное число шагов, он возвращает в начальное положение клапан.
После того, как регулятор отметит определенное число шагов, он возвращает в начальное положение клапан.
Если двигатель машины прогрет, датчик на начало регулировки расположен на отметке примерно в 40 шагов. Объем воздуха при снижении либо повышении количества шагов постоянно меняется:
- они уменьшаются, если шток втягивается;
- они увеличиваются, когда шток вытягивается.
Показатель хода штока на ВАЗ 2114 равняется 250 шагам.
Заданный объем воздуха поступает в ДВС, что дает возможность качественно контролировать ХХ. Воздух, попадая в двигатель, изучается ДМРВ (датчиком расхода). А затем на основании этого анализа контроллер ДМРВ направляет через топливные форсунки требуемый объем топлива. Другой датчик, задача которого заключается в регулировке положения коленвала, отслеживает обороты мотора и контролирует функционирование РХХ.
Симптомы неисправности РХХ
Бортовой компьютер автомобиля не может просигнализировать водителю о том, что регулятор холостого хода ВАЗ 2114 вышел из строя, так как он не снабжен устройством самостоятельной диагностики.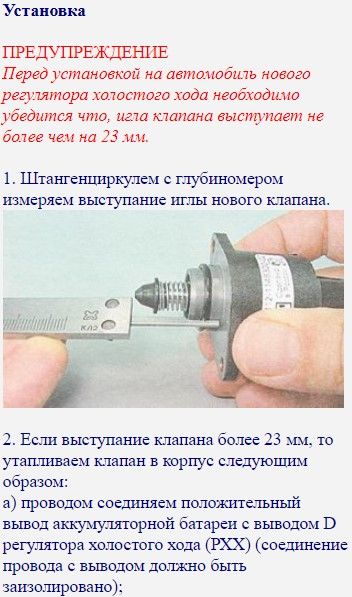 Поэтому опытные автомобилисты обращают внимание на поведение своей машины, которое подсказывает им о неприятностях с РХХ.
Поэтому опытные автомобилисты обращают внимание на поведение своей машины, которое подсказывает им о неприятностях с РХХ.
Признаками неисправности регулятора являются следующие симптомы:
- обороты ХХ «плавают»;
- на холостом ходу и при снятии на коробке передачи двигатель может заглохнуть;
- нет высоких оборотов при запуске мотора в холодном состоянии.
При наличии озвученных явлений необходимо осуществить анализ РХХ по схеме, приведенной далее.
Проверка работоспособности датчика
Чтобы проанализировать РХХ, его нужно отсоединить от колодки проводов, после чего убедиться в наличии на устройстве напряжения.
Операция выполняется стандартным вольтметром. Схема ее проведения такова:
- зажигание отключается;
- замеряется напряжение.
В тех случаях, когда напряжения нет, следует полностью проверить всю электроцепь и ЭБУ. Если напряжение находится в районе 12 В, виноват не датчик. Вероятнее всего АКБ потеряла заряд. После этого следует включить зажигание и подсоединить к регулятору колодку с питанием.
После этого следует включить зажигание и подсоединить к регулятору колодку с питанием.
РХХ находится в неисправном состоянии, если при этом не происходит выдвижения его иглы. Убедившись в поломке регулятора, можно приступать к его замене.
- Автор: Леонид
- Распечатать
Оцените статью:
(3 голоса, среднее: 2.7 из 5)
Поделитесь с друзьями!
Adblock
detector
функции РХХ, расположение регулятора, типичные неисправности и их признаки, порядок замены
Холостой ход – это режим работы двигателя, в котором КПП от него изолирована. При этом дроссельная заслонка находится в закрытом положении. Этот режим предназначен для прогрева мотора до рабочей температуры функционирования всех систем ДВС (двигателя внутреннего сгорания).
Содержание
- Где находится и как работает РХХ
- Принцип работы РХХ
- Признаки неисправности РХХ
- Как проверить регулятор
- Очистка РХХ
- Принцип работы дроссельной заслонки
- Снятие дросселя
- Чистка заслонки
- Замена регулятора холостого хода
Вернуться к оглавлению
Где находится и как работает РХХ
Датчик холостого хода Калины выполняет четыре основные функции:
- Поддержание определенного количества оборотов двигателя.
- Обеспечение условий запуска мотора зимой при отрицательных температурах. Это значит, что РХХ может повышать обороты для того, чтобы двигатель быстрее прогревался. По мере достижения рабочей температуры обороты постепенно уменьшаются.

- Поддержание минимальных оборотов мотора при отпущенной педали газа. Многие автомобилисты недооценивают эту функцию, пока не начинаются проблемы с запуском и нестабильной работой двигателя.
- Создание топливовоздушной смеси с нужным процентным содержанием горючего и воздуха. Благодаря этому обеспечиваются оптимальный расход топлива и стабильная работа силовой установки.

Так как РХХ отвечает за подачу воздуха в цилиндры, располагается он на дроссельном узле. Регулятор почти на всех бензиновых атмосферных двигателях находится рядом с датчиком положения дроссельной заслонки, и Калина не исключение.
Вернуться к оглавлению
Принцип работы РХХ
Когда двигатель работает без повышения оборотов, то есть на холостом ходу, в камеры сгорания цилиндров поступает минимальный объем воздуха. Это происходит независимо от того, что дроссельная заслонка находится в закрытом положении.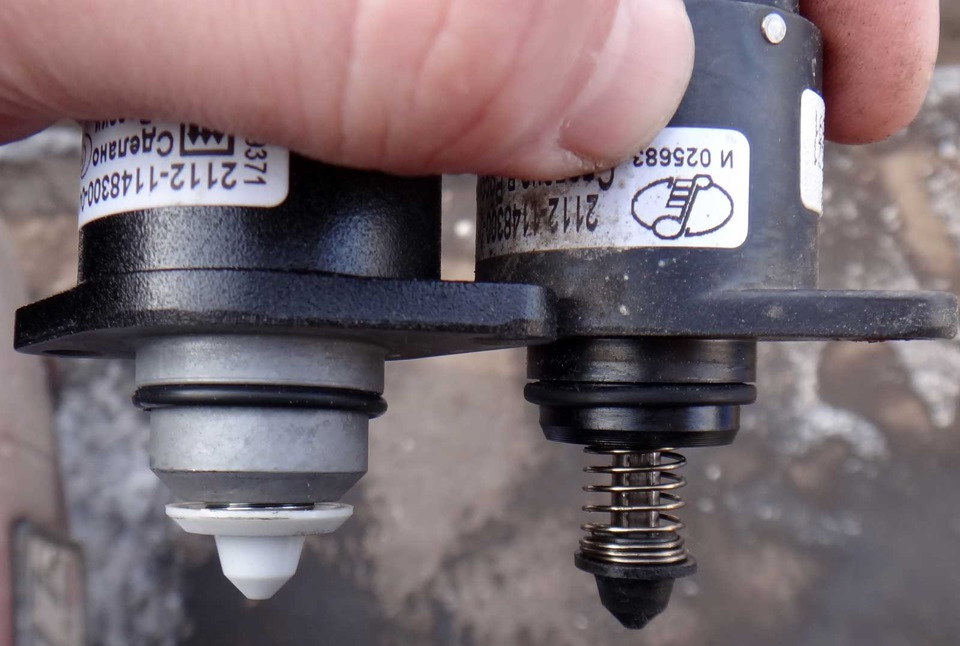
На основе полученной информации блок управления подаёт в цилиндры нужное количество топлива через форсунки. Одновременно с этим контроллер отслеживает обороты коленвала по датчику его положения (ДПКВ). Согласно полученным данным, игла РХХ открывается или закрывается, контролируя подачу воздуха мимо дроссельной заслонки, которая на этом этапе не участвует в работе мотора.
Если двигатель ещё не вышел на заданную температуру, контроллер с помощью РХХ увеличивает подачу воздуха, повышая обороты коленвала для более быстрого прогрева силового агрегата. Благодаря такому режиму автомобиль может начинать движение практически сразу, без необходимости достижения рабочих температур.
Технически РХХ не является датчиком, он – исполнительный инструмент, поэтому диагностировать его неисправность контроллер не может. Это значит, что значок «Check Engine» при поломке регулятора не загорится на панели приборов. По своим признакам неполадки РХХ схожи с неисправностями ДПДЗ (датчика положения дроссельной заслонки). Но в случае с последним обязательно загорится значок, сигнализирующий о неполадках двигателя.
Это значит, что значок «Check Engine» при поломке регулятора не загорится на панели приборов. По своим признакам неполадки РХХ схожи с неисправностями ДПДЗ (датчика положения дроссельной заслонки). Но в случае с последним обязательно загорится значок, сигнализирующий о неполадках двигателя.
Вернуться к оглавлению
Признаки неисправности РХХ
Среди признаков, которые прямо или косвенно указывают на некорректную работу датчика холостого хода, можно выделить следующие:
- двигатель плохо запускается – без нажатия на педаль газа запустить мотор становится невозможно;
- при переходе на нейтральную передачу наблюдаются «провалы» в оборотах и их нестабильность;
- при переключении передач обороты падают или двигатель вовсе глохнет;
- мотор плохо прогревается при отрицательных температурах, так как повышенные обороты (1500 об/мин) не достигаются;
- после включения энергопотребителей (дальний свет, отопитель, кондиционер) обороты начинают «проседать» или «плавать»;
- двигатель самопроизвольно повышает и понижает обороты.

РХХ нельзя отремонтировать, устройство подлежит замене. Перед тем как поменять регулятор холостого хода, желательно провести промывку дроссельного узла.
Как проверить регулятор
Способов диагностики РХХ достаточно много. Самые действенные и простые методы проверки регулятора холостого хода Калины:
- Обычное тестирование РХХ на работоспособность. Для этого устройство нужно снять с дроссельного узла и подключить клеммную колодку, если для демонтажа она была отсоединена. После этого нужно запустить двигатель. В момент запуска игла исправного устройства должна выдвинуться. Если подобного не наблюдается – регулятор сломан.
- Проверка подачи на датчик необходимого напряжения. Нужно отсоединить от РХХ клеммную колодку и подключить к выводам вольтметр. После этого один человек включает зажигание, а второй измеряет сопротивление на всех выводах колодки. При отсутствии неисправностей показания вольтметра должны составлять примерно 50 Ом. Напряжение должно быть на уровне 12 В. Если оно существенно меньше, это указывает на неисправность аккумулятора или обрыв электроцепи на одном из участков.
- Измерение сопротивления внутренней и наружной обмоток регулятора. Для этого необходимо воспользоваться мультиметром. Результаты измерения не должны быть ниже 40 Ом и выше 80 Ом. При отклонении от заданного диапазона регулятор холостого хода нужно менять.
 При отсутствии неисправностей показания вольтметра должны составлять примерно 50 Ом. Напряжение должно быть на уровне 12 В. Если оно существенно меньше, это указывает на неисправность аккумулятора или обрыв электроцепи на одном из участков.
При отсутствии неисправностей показания вольтметра должны составлять примерно 50 Ом. Напряжение должно быть на уровне 12 В. Если оно существенно меньше, это указывает на неисправность аккумулятора или обрыв электроцепи на одном из участков.Зная признаки неполадок, можно своевременно диагностировать неисправности РХХ и принять меры по их устранению. Хотя регулятор не подлежит ремонту, стоит попытаться его почистить. В некоторых случаях этого оказывается достаточно.
Вернуться к оглавлению
Очистка РХХ
Работа по устранению неисправностей регулятора холостого хода своими руками заключается в его банальной промывке от нагара. Для этого нужно следовать инструкции:

- отсоединить фишку проводов от датчика;
- выкрутить два крепёжных винта небольшой фигурной отвёрткой и извлечь датчик из посадочного гнезда;
- с помощью WD-40 или очистителя для карбюратора промыть конус иглы.
Этими же средствами можно протереть контакты регулятора и весь дроссельный узел.
После очистки РХХ устанавливают обратно. При этом нужно измерить расстояние от конца иглы до корпуса – оно должно быть равно примерно 2,3 см.
Вернуться к оглавлению
Принцип работы дроссельной заслонки
Это устройство уменьшает или, наоборот, увеличивает подачу воздуха в цилиндры двигателя, обогащая или обедняя смесь с топливом.
Дроссельная заслонка
Когда водитель давит на педаль газа, дроссельная заслонка открывается, пропуская в камеры сгорания больше воздуха. Кислород смешивается с топливом, после чего приготовленная смесь сгорает. Чем больше водитель давит на педаль газа, тем шире открывается заслонка и тем больше поступает воздуха. Но нередко на стенках заслонки скапливается нагар, и ее неплотное закрытие вызывает нарушения в работе силовой установки.
Чем больше водитель давит на педаль газа, тем шире открывается заслонка и тем больше поступает воздуха. Но нередко на стенках заслонки скапливается нагар, и ее неплотное закрытие вызывает нарушения в работе силовой установки.
Дроссельный узел находится за воздушным фильтром двигателя. Такое расположение характерно не только для Лады Калины, но и для многих других автомобилей. В зависимости от типа двигателя работа заслонки может управляться электронной педалью газа или тросиковым приводом.
Вернуться к оглавлению
Снятие дросселя
Прежде чем приступить к очистке этого устройства, его необходимо демонтировать. Можно провести промывку и без снятия, но этот способ менее надёжный и эффективный. Процесс демонтажа выглядит следующим образом:
- Отсоедините воздушный патрубок, который идёт от воздушного фильтра непосредственно к дроссельному узлу.
- Снимите привод тросика газа.
- Отсоедините шланги подогрева дроссельной заслонки, по которым подводится охлаждающая жидкость – работу лучше проводить на остывшем двигателе. Чтобы не сливать антифриз, эти шланги можно заглушить.
- От датчика положения дроссельной заслонки и РХХ отсоедините клеммные колодки.
- Открутите 4 гайки крепления, снимите дроссельный узел в сборе.
 Чтобы не сливать антифриз, эти шланги можно заглушить.
Чтобы не сливать антифриз, эти шланги можно заглушить.На этом демонтаж завершён. Работа несложная, ее может выполнить даже новичок.
Вернуться к оглавлению
Чистка заслонки
Воспользовавшись очищающими средствами, можно промыть заслонку в домашних условиях. Дополнительно понадобится несколько кусков чистой ветоши. Алгоритм процесса очищения:
- После демонтажа дроссельного узла нужно снять регулятор холостого хода и ДПДЗ, а также все доступные резиновые уплотнители, так как чистящее средство достаточно агрессивно и может их разъесть.
- Обычно жидкость для очистки выпускается в аэрозольном баллончике. С струю нужно направить на заслонку, во все воздушные каналы и внутренние стенки. Снаружи чистка необязательна.
- После обработки нужно подождать 10-15 минут для того, чтобы средство разъело нагар и грязь.
- Далее протрите поверхности ветошью, при сильном загрязнении обработку можно повторить.
 Снаружи чистка необязательна.
Снаружи чистка необязательна.Для чистки дросселя ни в коем случае нельзя использовать металлические щетки и другие абразивные материалы. Внутренняя поверхность узла покрыта молибденом, повреждение которого может привести к окислению металла, коррозии.
Вернуться к оглавлению
Замена регулятора холостого хода
Для работы понадобится всего лишь фигурная отвёртка. Если демонтаж подразумевает снятие дроссельного узла целиком, нужно подготовить набор стандартных торцевых ключей или головок.
- Для начала дождитесь, пока двигатель остынет, после этого можно отсоединить клеммы от аккумулятора.
- Со всех шлангов нужно снять хомуты.
- От регулятора холостого хода и датчика положения дроссельной заслонки следует отсоединить фишки проводов и демонтировать тросик газа.
- Шланги подогрева дросселя нужно снять и заглушить.
- Ключом на 13 откручиваются крепёжные гайки, затем дроссельный узел можно демонтировать.
- Далее остаётся открутить два винта, удерживающих регулятор холостого хода, и снять его. На его место устанавливается новый РХХ и закрепляется двумя винтами.

Не следует трогать и тем более двигать шток датчика – подобные манипуляции могут привести к выходу устройства из строя. Если после запуска будут наблюдаться повышенные обороты двигателя (больше 1500 об/мин), то ничего страшного в этом нет. При возникновении такой ситуации нужно заглушить мотор и запустить его снова – положение клапана РХХ откалибруется, и обороты придут в норму.
Монтаж дроссельного узла производится в порядке, обратном снятию. Если не требуется очистка заслонки, датчик можно заменить без демонтажа узла. При закручивании всех гаек нужно соблюдать осторожность и не допускать ослабления крепежей. В противном случае датчик будет вибрировать при работе двигателя и быстро придет в негодность.
Если не требуется очистка заслонки, датчик можно заменить без демонтажа узла. При закручивании всех гаек нужно соблюдать осторожность и не допускать ослабления крепежей. В противном случае датчик будет вибрировать при работе двигателя и быстро придет в негодность.
Во время эксплуатации автомобиля нужно периодически проверять все его системы и механизмы, диагностируя возможные неисправности на ранних стадиях. РХХ Лады Калины также следует иногда тестировать. Не следует допускать сильного загрязнения его иглы и в целом всего дроссельного узла.
При малейших нарушениях в стабильности работы двигателя необходимо проводить тщательную проверку и устранять все возможные неисправности. Только в этом случае автомобиль будет работать надёжно и долго.
Значение оптической мощности RX и TX
Оптическая мощность RX и TX — это два очень важных параметра оптических приемопередатчиков. Оптическая мощность как на стороне передатчика, так и на стороне приемника приемопередатчика должна находиться в правильном рабочем диапазоне, установленном поставщиком. Расхождения в оптической мощности TX/RX указывают на наличие проблем либо с кабелем, либо с самим приемопередатчиком.
Расхождения в оптической мощности TX/RX указывают на наличие проблем либо с кабелем, либо с самим приемопередатчиком.
Как работают оптические трансиверы?
Оптические приемопередатчики оснащены передатчиком и приемником в параллельной конфигурации. Таким образом, передатчик и приемник оптического модуля могут работать независимо, используя свои схемы. Передатчик развертывается на электрической стороне, так как он получает электрический сигнал через свой электрический интерфейс и преобразует полученный сигнал в оптический сигнал, прежде чем направить его по подключенному оптоволоконному кабелю. Аналогичный процесс происходит в приемнике, но в обратном порядке. Следующий экспонат демонстрирует принцип работы оптических модулей!
Световой сигнал, полученный на стороне приемника приемопередатчика, обнаруживается детектором, который преобразует световой сигнал в эквивалентный электрический сигнал, а затем электрический сигнал направляется на хост-порт через электрические помехи модуля.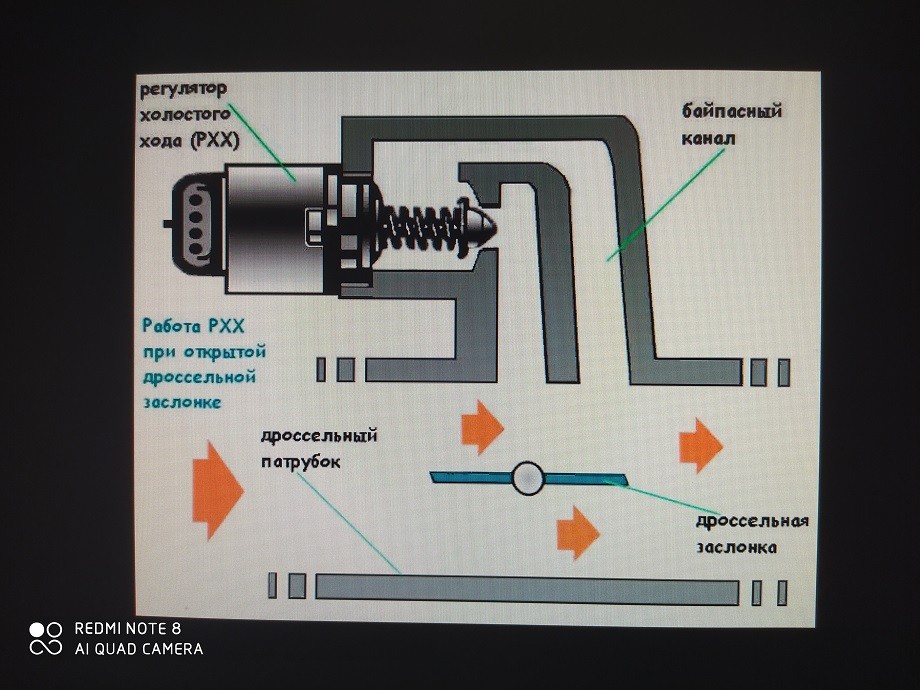 Сегодня у нас есть несколько видов оптических модулей. Классификация этих модулей может быть выполнена на основе форм-фактора, достижимого расстояния связи, полосы пропускания и т. д., однако принцип работы всех оптических приемопередатчиков почти идентичен, так как преобразование электрических сигналов в оптические и оптических в электрические то, что остается неизменным для различных типов и версий оптических приемопередатчиков.
Сегодня у нас есть несколько видов оптических модулей. Классификация этих модулей может быть выполнена на основе форм-фактора, достижимого расстояния связи, полосы пропускания и т. д., однако принцип работы всех оптических приемопередатчиков почти идентичен, так как преобразование электрических сигналов в оптические и оптических в электрические то, что остается неизменным для различных типов и версий оптических приемопередатчиков.
Почему важна оптическая мощность TX/RX?
Прежде всего, уточним, что TX и RX относятся к передаче и получению соответственно. Оптическая мощность RX (прием) также может называться входной оптической мощностью приемопередатчика, а оптическая мощность TX (передача) известна как выходная оптическая мощность. Эти два параметра очень важны, поскольку возможности и дальность действия приемопередатчика зависят от доступной оптической мощности обоих; приемный и передающий конец. Как мы все знаем, оптические приемопередатчики отправляют или получают данные в виде света. Таким образом, любой дефицит доступной оптической мощности может повлиять на его работоспособность и эффективность передачи.
Таким образом, любой дефицит доступной оптической мощности может повлиять на его работоспособность и эффективность передачи.
Как измерить оптическую мощность TX/RX?
Измерение мощности TX/RX не является большой проблемой, так как большинство оптических трансиверов поставляются со встроенной системой мониторинга через интерфейс DDM трансивера, вы можете отслеживать оптическую мощность как на стороне передатчика, так и на стороне приемника в режиме реального времени. временная основа. На следующем рисунке вы можете увидеть параметры, которые можно отслеживать через интерфейс DDM (цифровой диагностический мониторинг) оптического трансивера. Здесь важно понимать, что информация об оптической мощности и других параметрах может быть передана оптическим приемопередатчиком только в том случае, если он разработан со встроенной системой DDM.
В случае, если вы не можете получить доступ к диагностическому интерфейсу вашего модуля, вы также можете использовать портативный измеритель оптической мощности. Оптические измерители мощности считаются первичными приборами. С помощью измерителя оптической мощности вы сможете проверить доступную мощность на стороне передатчика или приемника. Для измерения фактических потерь и проверки целостности оптических кабелей вы также можете приобрести оптические рефлектометры (OTDR) или наборы для измерения оптических потерь (OLTS). Оптические измерители мощности очень просты в использовании, и даже начинающий специалист по сетевым технологиям может безопасно использовать это оборудование. Пожалуйста, ознакомьтесь со следующей иллюстрацией, чтобы понять принцип работы измерителей оптической мощности.
Оптические измерители мощности считаются первичными приборами. С помощью измерителя оптической мощности вы сможете проверить доступную мощность на стороне передатчика или приемника. Для измерения фактических потерь и проверки целостности оптических кабелей вы также можете приобрести оптические рефлектометры (OTDR) или наборы для измерения оптических потерь (OLTS). Оптические измерители мощности очень просты в использовании, и даже начинающий специалист по сетевым технологиям может безопасно использовать это оборудование. Пожалуйста, ознакомьтесь со следующей иллюстрацией, чтобы понять принцип работы измерителей оптической мощности.
Возможные причины низкой мощности RX
Низкая мощность RX не всегда указывает на неисправность трансивера, так как может быть несколько причин этой проблемы. Да! Дефектные или неисправные трансиверы нельзя исключать, но это случается лишь изредка. Будучи сетевым техником или инженером, вы должны иметь необходимый уровень навыков, знаний и понимания, чтобы справиться с проблемой низкого уровня TX или RX. Ниже приводится некоторая полезная информация о наиболее распространенных причинах, которые часто вызывают ухудшение оптических сигналов и, как следствие, такие проблемы, как низкая мощность RX или TX;
Ниже приводится некоторая полезная информация о наиболее распространенных причинах, которые часто вызывают ухудшение оптических сигналов и, как следствие, такие проблемы, как низкая мощность RX или TX;
- Слишком много изгибов кабеля
- Плохие выводы
- Неправильные оптические швы
- Неисправность TOSA (оптический узел передатчика)
- Микросхема модуля не работает должным образом
- Неплотная сварка штифтов LD+ и LD-
- Дутьевые резисторы или конденсаторы
- Проблемы с бортовой электроникой
Заключение
- Мониторинг оптической мощности RX и TX очень важная вещь
- Проверьте свою кабельную ферму на наличие неисправностей, если вы испытываете низкую оптическую мощность в одном или нескольких оптических модулях
- Иногда наблюдается низкая мощность RX или TX из-за производственных дефектов приемопередатчика — запросите гарантию, не пытаясь демонтировать модуль
- Оптические измерители мощности обеспечивают простые и понятные измерения в кабелях
- Предпочтение. Приемопередатчики со встроенным DDM для мониторинга оптической мощности RX и TX в режиме реального времени.
 Приемопередатчики со встроенным DDM для мониторинга оптической мощности RX и TX в режиме реального времени.
Приемопередатчики со встроенным DDM для мониторинга оптической мощности RX и TX в режиме реального времени.Принцип гетеродина и супергетеродинный приемник
Во время Первой мировой войны Эдвин Ховард Армстронг изобрел супергетеродинный приемник в качестве альтернативы приемникам с настроенной радиочастотой (TRF), которые перемещали настраиваемый фильтр на нужный сигнал. Его целью было преодолеть их ограничения в отношении избирательности и чувствительности. Чтобы понять принцип работы гетеродинного приемника, крайне важно наглядное изображение. Хотя это в целом верно для всех концепций, существуют определенные проблемы спектрального преобразования в архитектуре приемников, которые требуют красивых и четких рисунков. Вот как я поступаю ниже.
Принцип гетеродина
Вместо использования перестраиваемого полосового фильтра, сдвинутого на частоту сигнала, концепция гетеродина Rx заключается в разработке перестраиваемого гетеродина (LO), работающего на частоте $ F _ {\ text {LO}} $, который перемещает сигнал на фиксированный полосовой фильтр, как показано на рисунке ниже.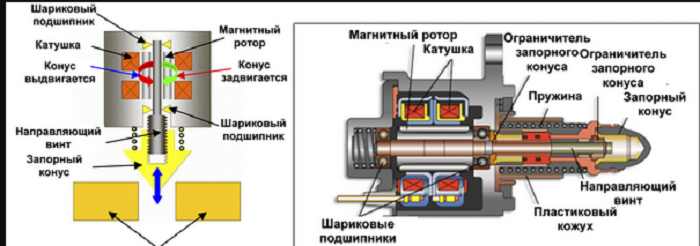 Этот фильтр работает на определенной частоте, известной как промежуточная частота (ПЧ).
Этот фильтр работает на определенной частоте, известной как промежуточная частота (ПЧ).
Итак, что именно мы здесь получили?
Преимущество такого подхода заключается в том, что независимо от выбранного канала большая часть операций усиления и фильтрации выполняется на фиксированной промежуточной частоте, где сравнительно легче проектировать усилители и фильтры с высоким коэффициентом усиления, демонстрирующие резкие переходные полосы пропускания.
Теперь мы понимаем эту идею через спектры сигнала и интерференции.
Преобразование с повышением частоты на стороне передачи
Отправной точкой является спектр реальной синусоиды $\cos 2\pi F_C t$ на несущей частоте $F_C$. Этот спектр состоит из двух импульсов, один при $+F_C$, а другой при $-F_C$, как описано здесь. В Tx эта синусоида смешивается (т.е. перемножается) с модулированным сигналом $v(t)$ как
\begin{equation*}
s(t) = v(t)\cdot \cos 2\pi F_C t
\end{уравнение*}
Спектр модулированного сигнала $v(t)$ обозначается как $V(F)$. Теперь умножение во временной области — это свертка в частотной области. Таким образом, в частотной области происходит свертка между этими двумя спектральными импульсами (вытекающими из косинуса) и спектром $V(F)$ модулированного сигнала. В результате этой свертки $V(F)$ смещается к двум частотам, а именно к $\pm F_C$, в результате чего получается сигнал полосы пропускания $S(F)$.
Теперь умножение во временной области — это свертка в частотной области. Таким образом, в частотной области происходит свертка между этими двумя спектральными импульсами (вытекающими из косинуса) и спектром $V(F)$ модулированного сигнала. В результате этой свертки $V(F)$ смещается к двум частотам, а именно к $\pm F_C$, в результате чего получается сигнал полосы пропускания $S(F)$.
\begin{equation*}
S(F) = \frac{1}{2} \left[S(F+F_C) + S(F-F_C)\right]
\end{equation*}
Полученный сигнал показан в первой строке рисунка ниже.
Давайте посмотрим, что происходит на стороне Rx.
Преобразование с понижением частоты на стороне Rx
На стороне Rx $S(F)$ смешивается с настраиваемым гетеродином с синусоидой $\cos 2\pi F_{\text{LO}} t$ на частоте $F_{ \text{LO}}$.
\begin{equation*}
x(t) = s(t)\cdot \cos 2\pi F_{\text{LO}} t = v(t) \cdot \cos 2\pi F_C t \cdot \ cos 2\pi F_{\text{LO}} t
\end{уравнение*}
Используя тождество $2\cos A\cos B$ $=$ $\cos (A+B)$ $+$ $\cos (A-B)$, эти две действительные синусоиды в Rx во временной области означают четыре импульса в частотной области. Свертка повторяется снова, на этот раз создавая копии $V(F)$ на следующих четырех частотах.
Свертка повторяется снова, на этот раз создавая копии $V(F)$ на следующих четырех частотах.
\begin{equation}
\begin{align} \label{eqNoTitleFCflo}
+F_C +F_{\text{LO}} &\qquad -F_C -F_{\text{LO}}\\
+F_C -F_ {\text{LO}} &\qquad -F_C +F_{\text{LO}}
\end{выровнено}
\end{уравнение}
Этот принцип спектральных трансляций посредством свертки с $F_{\text{LO}}$ показан на рисунке выше. Поскольку полосовой фильтр в Rx расположен на промежуточной частоте (ПЧ), одна из приведенных выше спектральных копий должна приходиться на ту же частоту. Предполагая, что эта копия $F_C-F_{\text{LO}}$ из четырех, показанных на этом рисунке, сигнал преобразуется с понижением частоты в ПЧ, равную
\begin{equation*}
F_{\text{IF} } = +F_C – F_{\text{LO}}
\end{уравнение*}
При фиксированном $F_{\text{IF}}$ и переменной $F_{\text{LO}}$ мы можем захватить любой канал, настроив $F_{\text{LO}}$ в соответствии с приведенным выше соотношением.
\begin{equation}\label{eqNoTitleFLO}
F_{\text{LO}} = F_C -F_{\text{IF}}
\end{equation}
Поскольку $F_{\text{LO}} $ $$ $F_C$. Далее мы исследуем проблему частоты изображения в гетеродинном Rx.
Далее мы исследуем проблему частоты изображения в гетеродинном Rx.
Частота изображения
Объясняя принцип супергетеродина на приведенном выше рисунке, мы сделали предположение, что весь спектр состоит только из нашего полезного сигнала. На самом деле, сама концепция спектра основана на разделении пользователей в частотной области путем присвоения им разных частот, широко известном как мультиплексирование с частотным разделением (FDM). По этой причине большая часть пустого спектра здесь фактически занята другими передачами.
Этот факт оказывается вредным для приемника, работающего с реальными синусоидами, по следующей причине.
- Наша спектральная трансляция выводит полезный сигнал $s(t)$ на несущей частоте $F_C$ в полосу пропускания фильтра на промежуточной частоте $F_{\text{IF}}$. Как показано на рисунке ниже, это результат свертки с импульсом в $-F_{\text{LO}}$.
- Тот же самый перевод приводит к $F_{\text{IF}}$ другой спектр из-за свертки с импульсом в $F_{\text{LO}}$. Из рассмотрения этого рисунка становится ясно, что спектр, мешающий полезному сигналу, исходит от частоты, расположенной на расстоянии $F_{\text{IF}}$ от $F_{\text{LO}}$. Чтобы понять этот момент, измерьте разницу частот между $F_C$ и $F_{\text{LO}}$, а затем между $F_{\text{LO}}$ и $F_{\text{image}}$ в приведенный выше рисунок.
 Из рассмотрения этого рисунка становится ясно, что спектр, мешающий полезному сигналу, исходит от частоты, расположенной на расстоянии $F_{\text{IF}}$ от $F_{\text{LO}}$. Чтобы понять этот момент, измерьте разницу частот между $F_C$ и $F_{\text{LO}}$, а затем между $F_{\text{LO}}$ и $F_{\text{image}}$ в приведенный выше рисунок.
Из рассмотрения этого рисунка становится ясно, что спектр, мешающий полезному сигналу, исходит от частоты, расположенной на расстоянии $F_{\text{IF}}$ от $F_{\text{LO}}$. Чтобы понять этот момент, измерьте разницу частот между $F_C$ и $F_{\text{LO}}$, а затем между $F_{\text{LO}}$ и $F_{\text{image}}$ в приведенный выше рисунок.Приведенный выше факт помогает нам рассчитать положение частоты изображения $F_{\text{image}}$ для инжекции в нижнюю сторону как
\begin{equation}\label{eqNoTitleFimage}
F_{\text{image} } = F_C -2F_{\text{IF}}
\end{equation}
Интуитивно это соотношение имеет смысл, поскольку с учетом сложения и вычитания синусоидальных частот $F_{\text{IF}}$ равно достигается с одной стороны сигналом на частоте $F_C$, а с другой стороны сигналом с разницей частот в $F_{\text{IF}}$, как показано в верхней части рисунка выше. Как только частота изображения находится в микшере, ее невозможно удалить, поскольку теперь она гетеродинируется в тот же диапазон ПЧ, что и желаемая станция.
Архитектура супергетеродина
Супергетеродин Rx решает проблему частоты изображения, вставляя фильтр подавления изображения (IR) перед микшером. Это приводит к супергетеродинной архитектуре Rx, показанной на рисунке ниже.
Работа супергетеродинного приемника состоит из следующих этапов.
- ВЧ-фильтр предварительной селекции служит для удаления внеполосной энергии сигнала, а также для частичного подавления сигнала, расположенного на частоте изображения.
- Затем сигнал усиливается малошумящим усилителем (МШУ).
- Затем сигнал частоты изображения очищается фильтром подавления изображения (IR). Является ли ИК-фильтр фиксированным или настраиваемым, зависит от диапазона полезных сигналов, который определяет, где расположены частоты изображения. В любом случае требования к ИК-фильтру намного мягче, чем к TRF Rx, поскольку его единственная цель — отфильтровать сигнал изображения (в отличие от фильтрации всего вокруг желаемого диапазона), а частоты изображения лежат далеко от центральной частоты. . Это приводит к большой полосе пропускания и низкой стоимости ИК-фильтра.
- Сигнал на выходе ИК-фильтра умножается или смешивается с выходным сигналом перестраиваемого гетеродина (LO) для преобразования желаемого диапазона с понижением частоты в фиксированную промежуточную частоту (ПЧ).
- В конце концов выходной сигнал может быть смещен непосредственно в полосу модулирующих частот отсюда или далее преобразован с понижением частоты в более низкие ПЧ перед окончательной демодуляцией. Если используется другой этап преобразования с понижением частоты, такая архитектура известна как приемник с двойной ПЧ.
 . Это приводит к большой полосе пропускания и низкой стоимости ИК-фильтра.
. Это приводит к большой полосе пропускания и низкой стоимости ИК-фильтра.На данном этапе необходимо просмотреть выходные сигналы на различных этапах этого процесса, чтобы получить представление о конструкции ИК-фильтра. Это показано на рисунке ниже, на котором особое внимание уделяется разнице между переходными полосами ИК-фильтра и фиксированного BPF.
Мы видели в уравнении (\ref{eqNoTitleFimage}), что полезный сигнал и сигнал изображения разделены удвоенной ПЧ.
- Вспоминая, что большая полоса пропускания накладывает более ослабляющие ограничения на фильтр, привлекательно выбрать высокую ПЧ, чтобы разнос частот между полезным сигналом и сигналом изображения был как можно больше. Это показано верхними стрелками и широким ИК-фильтром на рисунке выше.
- С другой стороны, низкая ПЧ позволяет использовать высококачественные фильтры выбора канала с лучшей селективностью или подавлением внеполосных помех.
Следовательно, выбор ПЧ зависит от компромисса между отклонением изображения и качеством выбора канала. Поскольку изображение падает прямо на предполагаемый канал, это ухудшает чувствительность Rx. Затем это приводит к более привычному компромиссу между чувствительностью и избирательностью в коммуникационном приемнике.
На протяжении многих лет гетеродинная архитектура широко использовалась в коммуникационных приемниках из-за ее хороших характеристик, достигаемых за счет достижения баланса в упомянутых выше компромиссах.