


Какие правила дорожного движения действуют во дворе? — Рамблер/авто
В дорожных правилах, дворы определяются, как прилегающие территории. Многие водители ошибочно считают, что правила дорожного движения на них не распространяются, но на самом деле это не так. На территории двора каждый автомобилист также должен соблюдать предписания законодательства, о чем стоит рассказать подробнее.
Наличие знаков. Если возле двора жилого дома есть обозначения въезда и выезда из придомовой территории, следует придерживаться закрепленных ПДД правил. К таковым относятся:
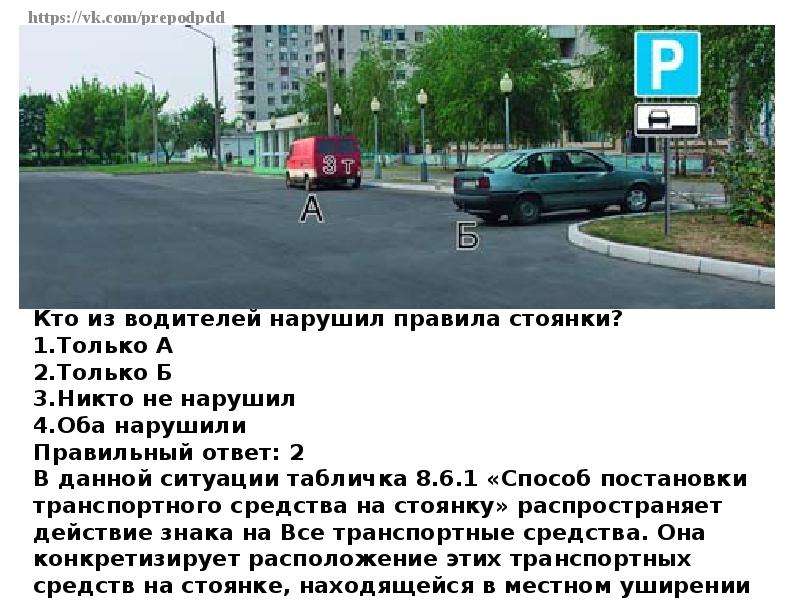
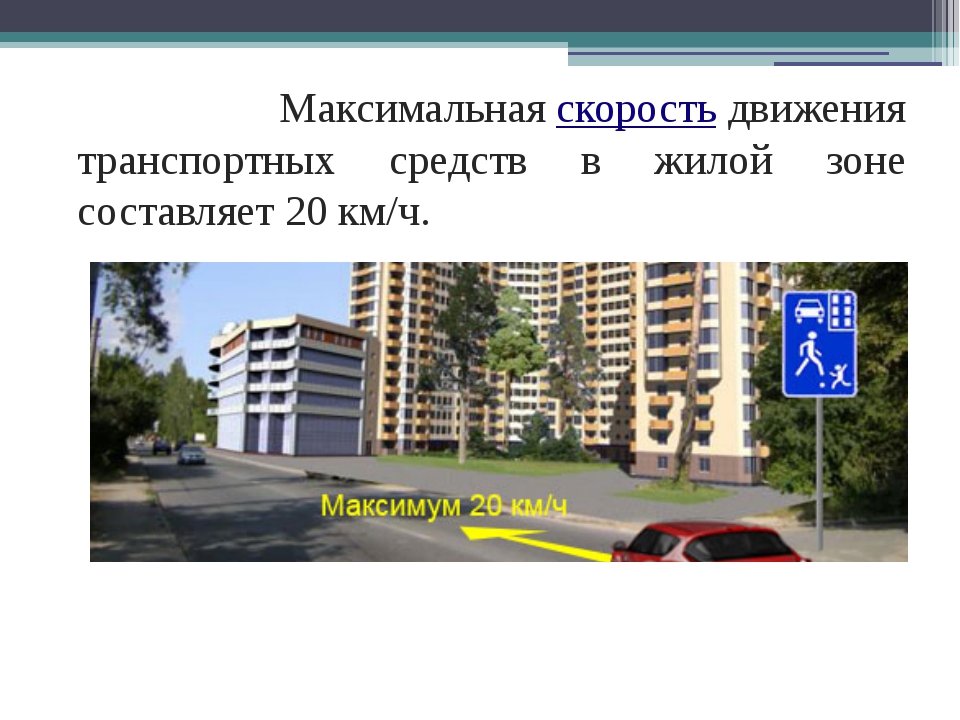
Скорость движения машины во дворе не должна превышать 20 км/ч
В приоритете на данном участке будут пешеходы, водитель обязательно должен их пропускать
Сквозной проезд в подобных местах строго запрещен
При выезде автомобилист должен уступить пешеходам или другим транспортным средствам на дороге
В других ситуациях водитель обязан придерживаться правил ПДД, сила которых не теряется даже на придомовых территориях
Правила выезда из придомовой территории. При выезде из территории возле дома, водитель обязан уступить дорогу, если у него есть «помехи». Если есть спуск, тогда первым проезжает тот, кто едет по нему. Другими словами, если перед авто стоит припаркованная машина, а вместе с тем по дороге движется еще один участник движения, уступить обязан именно тот, у кого возникла помеха. Как только автомобиль на дороге проедет, можно начинать движение.
При выезде из территории возле дома, водитель обязан уступить дорогу, если у него есть «помехи». Если есть спуск, тогда первым проезжает тот, кто едет по нему. Другими словами, если перед авто стоит припаркованная машина, а вместе с тем по дороге движется еще один участник движения, уступить обязан именно тот, у кого возникла помеха. Как только автомобиль на дороге проедет, можно начинать движение.
Во дворе часто бывает, что автомобили припаркованы с обоих сторон. Здесь уместно применять здравый смысл. Обычно водители предпочитают взаимодействовать и уступают друг другу, давая возможность выехать и по необходимости уступать дорогу.
Особенности дворовой территории. Главное, о чем стоит помнить при проезде через дворовую территорию, — это не превышать скорость в 20 км/ч. Более того, приоритет в данном случае всегда принадлежит пешеходу, водителям следует взаимодействовать между собой, не конфликтовать.
Важно не забывать, что на территории жилых домов правила дорожного движения все еще действуют, если их не соблюдать, это в итоге может привести к штрафу или ДТП с пешеходом.
Итог. Многие водители ошибочно считают, что при проезде через дворы жилых домов им необязательно соблюдать правила дорожного движения. Тем не менее, на самом деле это не так, к тому же стоит помнить о дополнительных ограничениях на прилегающих к дороге территориях, каковыми считаются дворы.
Взаимодействие и сотрудничество водителей между собой, а также предоставление приоритета пешеходам, поможет не только без проблем преодолеть дворовую территорию, но и избежать штрафов или наказания.
ПДД РБ глава 18. Движение в жилых зонах
131. Жилая зона обозначается дорожными знаками 5.38 «Жилая зона», 5.39 «Конец жилой зоны». В жилой зоне движение пешеходов разрешается по тротуарам и по проезжей части дороги. Пешеходы имеют преимущество перед транспортными средствами, но не должны препятствовать его движению.132. В жилой зоне водителям механических транспортных средств запрещается:
132.1. движение со скоростью более 20 км/ч;
132. 2. транзитное движение;
2. транзитное движение;
132.3. обучение вождению;
132.4. стоянка с работающим двигателем;
132.5. стоянка грузовых автомобилей с максимальной массой более 3,5 тонны, автобусов, тракторов, дорожно-строительных и других машин вне специально выделенных мест, обозначенных дорожным знаком 5.15 «Место стоянки», если это не связано с обслуживанием проживающих граждан, предприятий, зданий и сооружений.
133. При выезде из жилой зоны водители транспортных средств должны уступить дорогу другим участникам дорожного движения.
134. Требования настоящей главы распространяются также на прилегающие территории и дворы.
Другие главы ПДД Республики Беларусь
Глава 1 ПДД РБ Общие положения Глава 2 ПДД РБ Права участников дорожного движения Глава 3 ПДД РБ Обязанности водителей Глава 4 ПДД РБ Обязанности водителей и иных участников дорожного движения в особых случаях Глава 5 ПДД РБ Обязанности пешеходов Глава 6 ПДД РБ Обязанности пассажиров Глава 7 ПДД РБ Сигналы дорожных светофоров и регулировщика Глава 8 ПДД РБ Применение аварийной световой сигнализации и знака аварийной остановки Глава 9 ПДД РБ Начало движения, маневрирование Глава 10 ПДД РБ Расположение транспортных средств на проезжей части дороги Глава 11 ПДД РБ Скорость движения Глава 12 ПДД РБ Обгон, встречный разъезд Глава 13 ПДД РБ Остановка и стоянка Глава 14 ПДД РБ Проезд перекрестков Глава 15 ПДД РБ Пешеходные переходы и остановки маршрутных транспортных средств Глава 16 ПДД РБ Железнодорожные переезды Глава 17 ПДД РБ Движение по автомагистрали Глава 19 ПДД РБ Приоритет маршрутных транспортных средств Глава 20 ПДД РБ Пользование внешними световыми приборами и звуковыми сигналами транспортных средств Глава 21 ПДД РБ Буксировка механических транспортных средств Глава 22 ПДД РБ Обучение вождению механического транспортного средства Глава 23 ПДД РБ Перевозка пассажиров Глава 24 ПДД РБ Перевозка грузов Глава 25 ПДД РБ Движение на велосипедах и мопедах Глава 26 ПДД РБ Движение гужевого транспорта и прогон животных Глава 27 ПДД РБ Основные положения по допуску транспортных средств к участию в дорожном движении, их техническое состояние, оборудование Глава 28 ПДД РБ Обязанности должностных и иных лиц автотранспортных и других организаций по обеспечению безопасности дорожного движенияВы юрист? Нужны новые клиенты?
Разместите информацию о себе
— Это бесплатно
— Эту рекламу видят более 10 000 посетителей в день
— Для поднятия рейтинга надо отвечать на вопросы пользователей
ЗарегистрироватьсяПДД РК раздел 17.
 ДВИЖЕНИЕ В ЖИЛЫХ ЗОНАХ 17.1. В жилой зоне движение пешеходов разрешается как по тротуарам, так и по проезжей части. В жилой зоне пешеходы имеют преимущество, однако они не должны создавать необоснованные помехи для движения транспортных средств.
ДВИЖЕНИЕ В ЖИЛЫХ ЗОНАХ 17.1. В жилой зоне движение пешеходов разрешается как по тротуарам, так и по проезжей части. В жилой зоне пешеходы имеют преимущество, однако они не должны создавать необоснованные помехи для движения транспортных средств.17.2. В жилой зоне запрещается:
сквозное движение транспортных средств;
движение транспортных средств вне проезжей части;
учебная езда;
стоянка с работающим двигателем;
стоянка грузовых автомобилей с разрешенной максимальной массой более 3,5 т, автобусов вне специально выделенных и обозначенных знаками и (или) разметкой мест.
подавать звуковой сигнал, включать громкую музыку;
стоянка на тротуарах, газонах, детских и игровых площадках.
17.3. При выезде из жилой зоны водители должны уступить дорогу другим участникам движения.
17.4. Требования данного раздела распространяются также и на дворовые территории.
Другие разделы ПДД Казахстана
Раздел 1 ПДД РК ОБЩИЕ ПОЛОЖЕНИЯ Раздел 2 ПДД РК ОБЩИЕ ОБЯЗАННОСТИ ВОДИТЕЛЕЙ Раздел 3 ПДД РК ОБЯЗАННОСТИ ПЕШЕХОДОВ Раздел 4 ПДД РК ОБЯЗАННОСТИ ПАССАЖИРОВ Раздел 5 ПДД РК СИГНАЛЫ СВЕТОФОРА И РЕГУЛИРОВЩИКА Раздел 6 ПДД РК ПРИМЕНЕНИЕ СПЕЦИАЛЬНЫХ СИГНАЛОВ Раздел 7 ПДД РК ПРИМЕНЕНИЕ АВАРИЙНОЙ СИГНАЛИЗАЦИИ И ЗНАКА АВАРИЙНОЙ ОСТАНОВКИ Раздел 8 ПДД РК МАНЕВРИРОВАНИЕ Раздел 9 ПДД РК РАСПОЛОЖЕНИЕ ТРАНСПОРТНЫХ СРЕДСТВ НА ПРОЕЗЖЕЙ ЧАСТИ Раздел 10 ПДД РК СКОРОСТЬ ДВИЖЕНИЯ Раздел 11 ПДД РК ОБГОН, ВСТРЕЧНЫЙ РАЗЪЕЗД Раздел 12 ПДД РК ОСТАНОВКА И СТОЯНКА Раздел 13 ПДД РК ПРОЕЗД ПЕРЕКРЕСТКОВ Раздел 14 ПДД РК ПЕШЕХОДНЫЕ ПЕРЕХОДЫ И ОСТАНОВКИ МАРШРУТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ Раздел 15 ПДД РК ДВИЖЕНИЕ ЧЕРЕЗ ЖЕЛЕЗНОДОРОЖНЫЕ ПУТИ Раздел 16 ПДД РК ДВИЖЕНИЕ ПО АВТОМАГИСТРАЛЯМ Раздел 18 ПДД РК ПРИОРИТЕТ МАРШРУТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ Раздел 19 ПДД РК ПОЛЬЗОВАНИЕ ВНЕШНИМИ СВЕТОВЫМИ ПРИБОРАМИ И ЗВУКОВЫМИ СИГНАЛАМИ Раздел 20 ПДД РК БУКСИРОВКА МЕХАНИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ Раздел 21 ПДД РК УЧЕБНАЯ ЕЗДА Раздел 22 ПДД РК ПЕРЕВОЗКА ПАССАЖИРОВ Раздел 23 ПДД РК ПЕРЕВОЗКА ГРУЗОВ Раздел 24 ПДД РК ДОПОЛНИТЕЛЬНЫЕ ТРЕБОВАНИЯ К ДВИЖЕНИЮ ВЕЛОСИПЕДОВ, МОПЕДОВ, ГУЖЕВЫХ ПОВОЗОК, А ТАКЖЕ ПРОГОНУ ЖИВОТНЫХ
Разместите информацию о себе
— Это бесплатно
— Информация о 5 лучших юристах на всех страницах сайта
— Эту рекламу видят более 10 000 посетителей в день
— Для поднятия рейтинга надо отвечать на вопросы пользователей
Зарегистрироваться370-сон 24.
 12.2015. Об утверждении Правил дорожного движенияКабинета Министров Республики Узбекистан(пункт 138 в редакции постановления Кабинета Министров Республики Узбекистан от 17 декабря 2020 года № 796 — Национальная база данных законодательства, 18.12.2020 г., № 09/20/796/1639)ТРАНСПОРТНЫЕ СВЕТОФОРЫПЕШЕХОДНЫЕ СВЕТОФОРЫДОРОЖНЫЕ ЗНАКИ
12.2015. Об утверждении Правил дорожного движенияКабинета Министров Республики Узбекистан(пункт 138 в редакции постановления Кабинета Министров Республики Узбекистан от 17 декабря 2020 года № 796 — Национальная база данных законодательства, 18.12.2020 г., № 09/20/796/1639)ТРАНСПОРТНЫЕ СВЕТОФОРЫПЕШЕХОДНЫЕ СВЕТОФОРЫДОРОЖНЫЕ ЗНАКИПРЕДУПРЕЖДАЮЩИЕ ЗНАКИ
(пункт 7.4 в редакции постановления Кабинета Министров Республики Узбекистан от 2 августа 2019 года № 646 — Национальная база данных законодательства, 03.08.2019 г., № 09/19/646/3508) ОБОЗНАЧЕНИЕ АВТОТРАНСПОРТНЫХ СРЕДСТВ** | * | |
*** | ||
1. | ПРИМЕНЯТЬ СУХИЕ ВЕЩЕСТВА, ВОДУ НЕ ПРИМЕНЯТЬ! | |
2. | ПРИМЕНЯТЬ ВОДЯНЫЕ СТРУИ! | |
3. | ПРИМЕНЯТЬ РАСПЫЛЕННУЮ ВОДУ ИЛИ ТОНКИЕ СТРУИ! | |
4. | ПРИМЕНЯТЬ ПЕНУ! | |
5. | ПРЕДОТВРАТИТЬ ПОПАДАНИЕ ВЕЩЕСТВ В СТОЧНЫЕ ВОДЫ! | |
N | ДЫХАТЕЛЬНЫЙ АППАРАТ И ЗАЩИТНЫЕ ПЕРЧАТКИ! | |
YO | ДЫХАТЕЛЬНЫЙ АППАРАТ И ЗАЩИТНЫЕ ПЕРЧАТКИ ТОЛЬКО ПРИ ПОЖАРЕ! | |
K | ПОЛНЫЙ ЗАЩИТНЫЙ КОМПЛЕКТ ОДЕЖДЫ И ДЫХАТЕЛЬНЫЙ АППАРАТ! | |
E | НЕОБХОДИМА ЭВАКУАЦИЯ ЛЮДЕЙ! | |

(Собрание законодательства Республики Узбекистан, 2016 г.
 , № 3, ст. 23; 2017 г., № 36, ст. 958; Национальная база данных законодательства, 26.02.2018 г., № 09/18/139/0818, 04.05.2018 г., № 09/18/321/1154, 18.07.2018 г., № 09/18/547/1531; 10.04.2019 г., № 09/19/292/2915, 03.08.2019 г., № 09/19/646/3508, 19.11.2019 г., № 09/19/915/4033; 18.12.2020 г., № 09/20/796/1639)
, № 3, ст. 23; 2017 г., № 36, ст. 958; Национальная база данных законодательства, 26.02.2018 г., № 09/18/139/0818, 04.05.2018 г., № 09/18/321/1154, 18.07.2018 г., № 09/18/547/1531; 10.04.2019 г., № 09/19/292/2915, 03.08.2019 г., № 09/19/646/3508, 19.11.2019 г., № 09/19/915/4033; 18.12.2020 г., № 09/20/796/1639)Пешеход VS автомобиль. Кто кого должен пропускать. Приоритеты
Эту статью как никогда хотелось бы начать со слов — безумству храбрых поем мы песню… Так порой можно сказать о пешеходах, здесь хотелось бы сказать о пешеходках, особо акцентируя внимание на них. Однако такого слова в русском языке нет. Но вы поняли, о чем мы. Нет, у нас не имеется какой-то особой ненавистной предрасположенности к нашим девушкам и женщинам, но именно они почему-то часто не смотрят по сторонам, когда переходят дорогу. Здесь мы даже не о том, что надо ходить быстрее и все в таком духе, совсем нет! А о том, что просто смотрите по сторонам!
 Так ли это? Именно расстановке этих приоритетов и будет посвящена наша статья. Мы постараемся разобрать наиболее вероятные и возможные случаи, когда сталкивается пешеход и машина. Сталкивается в смысле расстановки приоритетов, а не физическом. Также поговорим о том, кто прав и виноват, если все же происходит «разбор полетов» на эту тему.
Так ли это? Именно расстановке этих приоритетов и будет посвящена наша статья. Мы постараемся разобрать наиболее вероятные и возможные случаи, когда сталкивается пешеход и машина. Сталкивается в смысле расстановки приоритетов, а не физическом. Также поговорим о том, кто прав и виноват, если все же происходит «разбор полетов» на эту тему.Пешеход VS автомобиль. Кто кого должен пропускать во дворах (жилые зоны, дворовые территории)
Первое с чего стоит начать так это с дворовых территорий. Здесь необходимо обратиться к главе 17 ПДД
|
17.1. В жилой зоне, то есть на территории, въезды на которую и выезды с которой обозначены знаками 5.21 и 5.22, движение пешеходов разрешается как по тротуарам, так и по проезжей части. В жилой зоне пешеходы имеют преимущество, однако они не должны создавать необоснованные помехи для движения транспортных средств. |
Жилая зона от дворовой территории различается только наличием знака 5. 21 и 5.22, больше ничем. О чем говорит пункт 17.4
21 и 5.22, больше ничем. О чем говорит пункт 17.4
|
17.4. Требования данного раздела распространяются также и на дворовые территории. |
Примечательно то обстоятельство, что определения для понятия «Дворовая территория» нет. Есть неформальное гуляющее по сети.
Дворовая территория (определение) – это пространство, ограниченное зданиями по периметру, внутри которого, как правило, размещаются детские площадки, места для отдыха, зеленые насаждения, местные проезды к домам, школам, детским садам и пр. В отличии от жилой зоны, дворовые территории не обозначаются дорожным знаком 5.21 и не имеют сети улиц местного значения и проездов.
По сути можно резюмировать что пешеходы имеют преимущество, все остальное можно не читать, так как слова «необоснованная помеха», некем точно не определены, а значит доказать эту необоснованность ой как сложно. Здесь остается лишь пожелать водителям терпения, а пешеходам сострадания к ближнему.
Пешеход VS автомобиль. Кто кого должен пропускать на пешеходном переходе
Здесь совсем все просто. Пешеходный переход для пешеходов, а водитель согласно ПДД должен пропускать этих самых пешеходов на нем. Об этом в главе 14 ПДД «Пешеходные переходы и места остановок маршрутных транспортных средств»
|
14.1. Водитель транспортного средства, приближающегося к нерегулируемому пешеходному переходу <*>, обязан уступить дорогу пешеходам, переходящим дорогу или вступившим на проезжую часть (трамвайные пути) для осуществления перехода. |
Здесь тоже вроде как все понятно, что у пешеходов однозначный приоритет. Единственное замечание, так это то, что если все же возникнет ситуация с тем, что пешеход необоснованно подверг свою жизнь опасности на пешеходном переходе, то есть не убедился в безопасности. Скажем, водитель ехал быстро и не мог пропустить пешехода или видно было видно, что водитель не собирался этого делать, то здесь по нашему мнению должен быть к административной ответственности привлечен и сам пешеход, так как нарушил п. 4.5 ПДД «Обязанности пешеходов»
4.5 ПДД «Обязанности пешеходов»
|
На нерегулируемых пешеходных переходах пешеходы могут выходить на проезжую часть после того, как оценят расстояние до приближающихся транспортных средств, их скорость и убедятся, что переход будет для них безопасен. |
То есть приоритет у пешехода, но в случае конфликтной ситуации или привлечения водителя к административной ответственности, необходимо привлечь к ответственности и пешехода. Более подробно в статье «Штраф за то, что не пропустил пешехода».
Пешеход VS автомобиль. Кто кого должен пропускать при переходе дороге вне пешеходного перехода на прямом участке дороги
Здесь опять обращаемся все к тому же разделу «Обязанности пешеходов» и к тому же пункту 4.5. В дополнение к тому, что пешеход должен переходить дорогу безопасно, смотрите из абзаца выше, при переходе через дорогу вне пешеходного перехода он должен следовать следующим принципам…
|
…При пересечении проезжей части вне пешеходного перехода пешеходы, кроме того, не должны создавать помех для движения транспортных средств и выходить из-за стоящего транспортного средства или иного препятствия, ограничивающего обзорность, не убедившись в отсутствии приближающихся транспортных средств. |

То есть не мешать и даже более того, желательно не видеть машин в поле своего зрения. При этом в обязанностях водителя ничего не сказано на счет пешеходов. То есть можно сделать вывод о том, что если будут проблемы с переходом пешеходом дороги вне пешеходного перехода, то не прав, скорее всего, окажется пешеход. Именно из этого необходимо сделать вывод о приоритете автомобиля над пешеходом на прямом участке дороги без пешеходных переходов.
Пешеход VS автомобиль. Кто кого должен пропускать на нерегулируемом перекрестке
Здесь опять же обратимся к ПДД, глава 13 «Проезд перекрестков», ведь как же без догм.
|
13.1. При повороте направо или налево водитель обязан уступить дорогу пешеходам, переходящим проезжую часть дороги, на которую он поворачивает… |
Как ни странно, ПДД не до конца описывают ситуацию с пешеходами на перекрестке. Сейчас вы в этом убедитесь сами.
Заметьте, что ничего не сказано на счет движения автомобиля прямо. Если водитель едет прямо, а не поворачивает, то должен ли он уступать пешеходу?
Об этом нет ничего в ПДД. То есть, если на перекрестке нет пешеходного перехода, нет светофора, то водитель не должен уступать пешеходу, если движется прямо. Однако, как мы помним из предыдущих абзацев, пешеход не должен переходить дорогу, не удостоверившись в безопасности перехода. В итоге получается:
— если пешеход переходит дорогу и видит, что на его полосу будет поворачивать автомобиль, то он имеет приоритет;
— если же он хочет перейти перекресток перпендикулярно прямолинейному движению машины, без светофора и пешеходного перехода, то здесь у него приоритетов нет. (одни рекомендации).
Именно так получается по российскому законодательству. И здесь не надо восклицать о безопасности и о логике здравого поведения, ведь по сути все должно быть еще оформлено и де-юре. Но здесь есть некая дырка.
Единственное что может спасти пешехода так это «Конвенция о дорожном движении» (Вена, 8 ноября 1968 г. ), которая является международным правовым актом, а именно статья 21…
), которая является международным правовым актом, а именно статья 21…
|
…мешать движению пешеходов, которые уже вступили на проезжую часть на перекрестке или вблизи него, даже если в этом месте не имеется пешеходных переходов, обозначенных разметкой или знаками и сигналами. |
Поэтому можно сказать так. При прямолинейном движении российское законодательство не дает точных разъяснений по поводу приоритета между водителем и пешеходом, а вот Венская конвенция будет на стороне пешехода. Так что переходя дорогу перпендикулярно прямолинейному движению машины на перекрестке без «зебры» и светофора, пешеход должен тешить себя мыслью о том, что Венская конвенция за него, а российское законодательство отмалчивается.
Пешеход VS автомобиль. Кто кого должен пропускать на регулируемом перекрестке
Это быть может наиболее интересная ситуация из вышеперечисленных, и та из-за которой мы собственно и решили написать статью. Что же в этом интересного, давайте разберемся вместе. Если вы еще здесь…
Что же в этом интересного, давайте разберемся вместе. Если вы еще здесь…
Начинается все с того, что горит зеленый свет для машин и пешеходов. В итоге водители руководствуются пунктом 13.8 ПДД
При включении разрешающего сигнала светофора водитель обязан уступить дорогу транспортным средствам, завершающим движение через перекресток, и пешеходам, не закончившим переход проезжей части данного направления.
Все здесь хорошо. У пешехода приоритет, водитель пропускает. Теперь еще вариант, когда разрешающий сигнал для машин горел, а для пешеходов нет. В этом случае, когда все машину успевают разъехаться до того как пешеходы начнут движение, у нас не возникает вопросов. Однако это не всегда жизненный вариант. Случается что водитель завершает движение после того как ему уже горит запрещающий, на основании пункта 13.7. все тех же ПДД, а пешеходы только начинают свой путь на разрешающий.
|
Водитель, въехавший на перекресток при разрешающем сигнале светофора, должен выехать в намеченном направлении независимо от сигналов светофора на выходе с перекрестка. |

Здесь вроде как водитель должен уехать, а пешеходы, которым загорелся разрешающий свет светофора, должны убедиться в безопасности перехода. Знающий пешеход, так скажем осведомленный в ПДД, должен понимать, что водитель завершает маневр на перекрестке, а значит, переходит дорогу опасно пока он не уехал. Вот и получается, что опять на законодательном уровне точки над «И» не расставлены, однако водитель пешеходу в этой ситуации ничего не должен, а должен завершить маневр. При этом пешеход обязан обеспечивать себе безопасность. Здесь уже можно подумать о приоритете для автомобиля, то есть дать ему спокойно завершить маневр на перекресте при завершившемся разрешающем, а лишь потом переходить дорогу на свой зеленый. Практика же по этому поводу сами знаете какая, водители стоят вначале пропуская все машины на разрешающий, а потом еще и на запрещающий, пока не пройдут все пешеходы. Вот действительности наших реалий, не подкрепленные законными нормативными актами.
Подводя итог о теме «Пешеход VS автомобиль. Кто кого должен пропускать»
Покопавшись не так глубоко в наших ПДД, мы нашли пару изъянов, так называемых «дырок в законе». Это на счет перехода перекрестка не имеющего светофора и пешеходного перехода, когда пешеход переходит дорогу перпендикулярно движению машины.
Второй вариант, когда машина заканчивает движение под запрещающий свет, при этом разрешающий пешеходам уже загорелся. Несовершенность законодательства, не имеющего точного алгоритма действий и приоритетов в этом случае заставляет в очередной раз задуматься о его доработке.
Что касаемо пешеходов, то на самом деле во многих случаях, когда пешеход слепо верит в свою правоту, это не означает, что вам попался человек плохой и безответственный. Как нам кажется, это варианты когда он просто не осведомлен, что не прав. Ведь многие из пешеходов никогда не имели водительских прав, а значит, как они считают, и в ПДД заглядывать незачем. Ведь у них нет машины. Хотя подобные встречаются и с правами.
Однако аксиомой для всех без исключения должно стать обязательное осведомление о ПДД, ведь по сути каждый из нас, как только вышел из дома уже является тем самым пешеходом, имеющим определенные права и обязанности. Пользуясь преимуществами транспорта, пусть даже общественного, каждый должен платить за это некими «неудобствами» общественного порядка. Здесь не может быть односторонней позиции привилегий, когда пользуясь благами социального строя, в данном случае мы о благах транспорта, которые он нам дает, думать лишь о своем преимуществе. Ведь порой выполнение тех самых обязанностей как раз и обеспечивают баланс исполнения закона при регулировании не только правовых отношений, но и бытовых позиций, которые часто возникают на дороге в результате стычек двух сторон, в поисках приоритета, кто кого должен пропускать.
ПДД для велосипедистов — Let’s bike it!
Говорят, что велосипедисты правил не соблюдают, ПДД не читают, поэтому нужно поскорей их запретить. Хотя если понаблюдать за некоторыми другими участниками движения, то возникает подозрения, что с правилами не знакомы как раз они. В последние несколько лет в ПДД внесли несколько поправок, которые как раз касаются велосипедов. Кто-то мог их пропустить, а кто-то, наверно, думает, что он и так всё знает лучше всех. Так или иначе, единственный достойный аргумент в любом споре — точное знание, как всё устроено на самом деле. Мы выбрали самые распространённые утверждения по поводу велосипедов, сопоставили их с действующими ПДД и добавили советы, которые помогут соблюсти закон (или нарушить его со знанием дела).
В последние несколько лет в ПДД внесли несколько поправок, которые как раз касаются велосипедов. Кто-то мог их пропустить, а кто-то, наверно, думает, что он и так всё знает лучше всех. Так или иначе, единственный достойный аргумент в любом споре — точное знание, как всё устроено на самом деле. Мы выбрали самые распространённые утверждения по поводу велосипедов, сопоставили их с действующими ПДД и добавили советы, которые помогут соблюсти закон (или нарушить его со знанием дела).
ЧТО ГОВОРЯТ Велосипед — такое же транспортное средство, как и машина.
КАК НА САМОМ ДЕЛЕ В п. 1.2 указано, что велосипед это «транспортное средство», а вот о его одинаковости с автомобилями там нет ни слова. Машина, если говорить в терминах ПДД, — механическое транспортное средство. Чувствуете разницу? Некоторые положения правил распространяются на все виды транспортных средств (например, обязанность уступать пешеходам на переходах), но есть пункты, которые касаются только машин или только велосипедов.
Разговоры про одинаковость обычно ведут к тому, что велосипедисты тоже должны получать права и платить дорожный налог, а штрафовать их надо по всей строгости закона. Это, конечно же, полная ерунда. Часто в вашем городе машины давят людей насмерть? А велосипеды? То-то же! Машина — транспортное средство повышенной опасности. Велосипед — нет, потому что он легче и медленней. Влияние велосипедов на состояние дорожного полотна тоже минимально. При этом сам велосипедист более уязвим в сравнении с теми, кто путешествует внутри металлического кузова. Поэтому во многих странах велосипедистов рассматривают как промежуточное звено между пешеходами и машинами. Им дают законодательные послабления, например, разрешают ездить на красный, и сквозь пальцы смотрят на некоторые мелкие нарушения .
ЧТО ГОВОРЯТ Кто-то говорит, что по тротуару ездить нельзя, а кто-то — что велосипеду не место на проезжей части. Известны случаи наложения штрафов и за то, и за другое.
КАК НА САМОМ ДЕЛЕ Местоположение велосипеда на дороге регулирует п. 24.2. Заучите эти цифры, чтобы бросить их в лицо очередному таксисту, который станет кричать, чтоб вы немедленно убрались с проезжей части на тротуар. Краткое содержание пункта: если на улице нет велоинфрастуктуры или пользоваться ей невозможно, разрешается ехать по правому краю проезжей части. Если невозможно ехать по проезжей части, надо двигаться по обочине. Поездки по тротуару — это крайнее средство на случай, когда невозможно ехать где-либо ещё.
Правда, многие трактуют это «невозможно» широко и в свою пользу. Мол страшно, значит невозможно. #velonation направил на этот счёт запрос в ГИБДД. Ответ был таким же неконкретным как и сама формулировка в ПДД: чиновники сообщили, что в каждом случае вопрос о том, было ли нарушение, рассматривается отдельно. Так что действуйте по своему разумению, но сперва прочите следующий пункт.
ЧТО ГОВОРЯТ Если велосипедист на тротуаре мешает или создаёт опасность для пешеходов, он должен слезать с велосипеда и катить его рядом.
КАК НА САМОМ ДЕЛЕ Всё верно — см. п. 24.6. Сторонники езды по тротуару конечно же скажут, что они с этим полностью согласны и ездят мимо пешеходов аккуратно и со всем уважением. Иногда так и есть, но иногда велосипедист на тротуаре напоминает собаковода, выпускающего во двор любимого пса без ошейника со словами: «Он же не кусается!» Выезжая на тротуар, помните не только о собственной безопасности, но и о том, что есть люди, для которых по разным причинам сам факт присутствия велосипеда на тротуаре — уже стресс и помеха.
ЧТО ГОВОРЯТ С детьми по тротуару можно.
КАК НА САМОМ ДЕЛЕ Можно и нужно — об этом тоже говорится в п. 24.2. Дети до 7 лет, сопровождающие их взрослые, а также люди, которые везут ребёнка на детском сидении, должны ехать только по тротуару. Возить детей без специального места на велосипедах запрещено (см. п. 24.8). С 7 до 14 лет можно ездить ещё и по велодорожкам.
Постановлением №832 от 12 июля 2017 года Правительство утвердило изменения в ПДД. Внесёнными изменениями разрешается движение велосипедистов по тротуару или пешеходной дорожке в случае сопровождения взрослым велосипедиста в возрасте до 14 лет.ЧТО ГОВОРЯТ На велополосе на Бульварном конце велосипедисту придётся спешиваться через каждые 50 метров. В таком духе высказывался в прошлом году депутат госдумы Вячеслав Лысаков.
КАК НА САМОМ ДЕЛЕ Судя по всему, на эту мысль депутата навели знаки с изображением перечеркнутого велосипеда. Что ж, Лысаков плохо разбирается в знаках. Перечёркнутый велосипед обозначает конец велодорожки — дальше вы едете на велосипеде на общих основаниях, но ни о каком спешивании речи не идёт. Запрет для велосипедов выглядит почти как «кирпич» — кружок с красной окантовкой и велосипедом посредине. Такие знаки в изобилии расставлены вокруг Красной площади. Есть ещё треугольный знак с велосипедом и красной окантовкой, он предупреждает автоводителей, что впереди их ждёт встреча с велоинфрастуктурой.
ЧТО ГОВОРЯТ В интернете идут споры, должен ли водитель машины перед поворотом направо уступать велосипедистам, которые едут прямо. А если должен, то при каких условиях.
КАК НА САМОМ ДЕЛЕ По одной из версий, уступать нужно только при наличии велодорожки. Это заблуждение, но его ещё понять можно — так было написано в прошлой версии ПДД. Сложнее понять людей, которые спорят с текущим вариантом п. 13.1. Цитируем: «При повороте направо или налево водитель обязан уступить дорогу пешеходам и велосипедистам, пересекающим проезжую часть дороги, на которую он поворачивает». Вроде, все понятно. Но нет, кто-то настаивает, что уступать надо только тем, кто спешился и пересекает улицу по зебре. Автомобилистам вообще очень нравится, кода велосипедисты спешиваются и превращаются обратно в пешеходов, но к правилам это отношения не имеет.
В любом случае, количество людей, которые не знают или вольно трактуют правило, выглядит несколько пугающе — нет никакой гарантии, что вас действительно пропустят. Лучшее, что вы можете сделать — встать на перекрёстке впереди машин. Так, во-первых, вас будет лучше видно. Во-вторых, велосипед стартует с места чуть быстрее чем машина, и у вас будет небольшая фора, чтоб поскорей проехать перекрёсток.
ЧТО ГОВОРЯТ Пешеходы обнаглели, они должны научиться уважать велосипедистов и слезать с велодорожек.
КАК НА САМОМ ДЕЛЕ Пешеходы обнаглели ничуть не больше, чем велосипедисты, которые едут по тротуару. П. 4.1 разрешает им ходить по велодорожкам, если по тротуару идти невозможно. Конкретики, как водится, в правилах нет, каждый трактует, как умеет.
ЧТО ГОВОРЯТ На велосипеде можно ехать по выделенным полосам общественного транспорта.
КАК НА САМОМ ДЕЛЕ П. 18.2 ввели в ПДД в 2015 году, и не все о нем знают, однако ездить по выделенкам ОТ действительно можно. Выделенным полосам далеко до настоящих велодорожек, но это все-таки лучше, чем ехать в потоке с машинами. Узнать выделенную полосу легко — на ней есть разметка в виде буквы А (очевидно, от слова автобус), а также табличка с пиктограммой в виде автобуса и ещё одна табличка, на которой указан режим работы. По выходным и в праздничные дни приоритет общественного транспорта и велосипедов обычно не действуют, по выделенкам могут ездить машины.
ЧТО ГОВОРЯТ На велосипеде должны быть фары.
КАК НА САМОМ ДЕЛЕ Мало прикрепить на велосипед фары, надо не забывать их включать «в тёмное время суток и в условиях недостаточной видимости независимо от освещения дороги, а также в тоннелях» — как того требует п. 19.1. Недостаточная видимость бывает, например, во время дождя. Человек, который едет в темноте на велосипеде без фонарей, превращается в невидимку и становится опасен для себя и окружающих. Самый простой способ не промахнуться — поставить динамо-фонари вроде тех, что используются в прокатных велобайках. Они включаются автоматически и горят всё время, пока вы крутите педали. Передняя фара должна быть белая, а задняя красная. Это важно, иначе вы введёте в заблуждение других участников движения.
Вроде, все просто, но есть один подвох в виде п. 19.5, который требует, чтобы на всех транспортных средствах днём включались фары ближнего света и дневные ходовые огни. Предположительно, этот пункт просто забыли отредактировать после того, как в ПДД внесли отдельные требования для велосипедов, поэтому его можно игнорировать.
ЧТО ГОВОРЯТ Нельзя выезжать на велосипеде без шлема и светоотражающие элементов на одежде. По слухам, были ситуации, когда велосипедистов штрафовали за отсутствие шлема.
КАК НА САМОМ ДЕЛЕ Носить шлем или нет — только ваш выбор. В правилах про шлемы нет ни слова, а п. 24.10 лишь рекомендует, но никак не обязывает велосипедистов носить светоотражающие элементы в темное время суток — что бы не кричали вам по этому поводу водители, умирающие от безделья в пробке. В ответ можете посоветовать им освежить на досуге ПДД — явно не помешает.
Читайте также:
Охота на зебре. Говоря о преступлении и наказании, важно сначала принять все возможные превентивные меры, а уж потом карать нарушителей.
ЧТО ГОВОРЯТ Велосипедисты должны спешиваться на зебре.
КАК НА САМОМ ДЕЛЕ Это вольный пересказ одного из положений п. 24.8. Точная формулировка звучит так: «Велосипедистам запрещается пересекать дорогу по пешеходным переходам». Это одно из самых неоднозначных нововведений в ПДД. Если добросовестно исполнять это правило на улице с большим количеством пересечений, поездка на велосипеде превращается в кошмар. С другой стороны, сторонники спешивания говорят, что автомобилист может не заметить мчащийся по зебре велосипед и не успеет вовремя затормозить.
Надо иметь ввиду, что п. 24.8 касается прежде всего тех, кто движется по велосипеде по тротуару — по проезжей части перекрёсток можно проезжать в общем потоке, без всяких спешиваний. Безоглядно гонять по тротуарам — в любом случае очень плохая идея. Тем более, на перекрёстках. С точки зрения #velonation, вы соблюдёте дух закона, если при подъезде к зебре сбросите скорость до пешеходной. Но имейте ввиду, что в глазах противников велотранспорта вы всё равно останетесь злостным нарушителем и живым доказательством того, что велосипеды нельзя пускать дальше парков. И в случае аварии виноваты окажетесь вы.
ЧТО ГОВОРЯТ Велосипедисты должны предупреждать о своих манёврах с помощью жестов.
КАК НА САМОМ ДЕЛЕ Ну а как иначе? У автомобилистов для этого есть специальные фары, у велосипедистов таких фар нет, поэтому п. 8.2 требует, чтобы вы сигналили руками. Есть два способа сообщить окружающим о намерении повернуть — они на картинке. Знак надо подавать до начала манёвра, а прекращать сразу после или даже в процессе выполнения (делать повороты надёжней, держась за руль обеими руками). Если вы хотите остановиться, поднимите вверх левую руку. Это очень просто. Подавать сигналы руками надо, в том числе, во время поездки по велодорожкам. Люди, которые едут на велосипеде следом за вами, должны быть в курсе ваших планов.
П. 8.2 — один из самых важных, наряду с требованием прикрепить на велосипед фары. Соблюдение этих двух правил сделает вас предсказуемым и заметным участником дорожного движения. Если бы силы, которые тратятся на разговоры о спешивании, вкладывались в пропаганду фонарей и знаков руками, порядка на дорогах стало бы больше.
ЧТО ГОВОРЯТ Поворачивать налево на велосипеде нельзя.
КАК НА САМОМ ДЕЛЕ Это почти верное утверждение — в п. 24.8 говорится, что велосипедам нельзя «поворачивать налево или разворачиваться на дорогах с трамвайным движением и на дорогах, имеющих более одной полосы для движения в данном направлении». Правило принято в целях безопасности — перестраиваться налево в потоке машин может быть действительно рискованно. В некоторых странах эту проблему решают — с помощью велосветофоров, велобоксов и так далее. Наши ПДД пока борются с опасностями по большей части запретительными мерами. Так что стопроцентно легально повернуть налево пока можно, лишь спешившись и двигаясь по пешеходном переходу.
Читайте также:
По городу на велосипеде — стоит ли рисковать? Риски и преимущества поездок на работу на велосипеде.
В этом материале перечислены далеко не все правила, имеющие отношение к велосипедам. Вы не ошибётесь, если прочтёте ПДД целиком — это не долго и не сложно. Текущую версию вы найдёте по ссылке. Выезжая из дома на велосипеде, будьте внимательны и вежливы к окружающим. В ПДД об этом ничего не сказано, но это одно из самых важных правил.
comments powered by HyperCommentsСамоорганизованный трафик по правилам приоритета у муравьев-листорезов
Abstract
Муравьи, термиты и люди часто образуют хорошо организованные и высокоэффективные тропы между разными местами. Однако микроскопические правила дорожного движения, ответственные за эту организацию и эффективность, до конца не изучены. В предыдущих экспериментальных исследованиях с муравьями-листорезами ( Atta colombica ) был выделен набор местных правил приоритета, и было предложено, чтобы эти правила управляли временной и пространственной организацией движения на тропах.Здесь мы представляем модель, основанную на этих правилах приоритета, чтобы исследовать, достаточны ли они для создания трафика, подобного тому, который наблюдался в экспериментах как на узком, так и на более широком маршруте. Установлено, что модель способна воспроизводить ключевые характеристики трафика на трассах. В частности, мы показываем, что предлагаемые правила приоритета вызывают рассинхронизацию в кластеры входящих и исходящих муравьев на узком следе, и что сегрегированный трафик, зависящий от типа приоритета, появляется на более широком следе.Из-за общего характера предлагаемых правил приоритета мы предполагаем, что они могут использоваться для моделирования организации движения у множества других видов муравьев.
Информация об авторе
Муравьи часто образуют тропы, чтобы транспортировать пищу и припасы, которые они находят, обратно в свое гнездо. Эти тропы имеют функцию, аналогичную дорогам, соединяющим дома людей с местным торговым центром, но хотя правила дорожного движения, которым должны следовать автомобили на наших дорогах, хорошо известны, правила дорожного движения, которые муравьи используют на своих тропах, все еще относительно неизвестны.Более ранние эксперименты с муравьями-листорезами предложили набор простых правил дорожного движения, по которым муравьи могут пытаться следовать по своим следам. Однако экспериментально проверить связь между предложенными правилами и наблюдаемой организацией дорожного движения сложно. Моделирование — полезный способ связать поведение, изолированное на индивидуальном уровне, и паттерн, зафиксированный на коллективном уровне. Здесь мы представляем и анализируем вычислительную модель на основе предложенных правил дорожного движения. Мы обнаружили, что с некоторыми изменениями предлагаемых правил действительно достаточно для воспроизведения ключевых характеристик общего движения муравьев, наблюдаемых в экспериментах.Укрепляя нашу веру в то, что эти правила дорожного движения могут использоваться муравьями-листорезами для регулирования организации дорожного движения, и из-за их простоты мы предполагаем, что аналогичные правила могут использоваться и другими видами муравьев.
Образец цитирования: Strömbom D, Dussutour A (2018) Самоорганизованное движение с помощью правил приоритета у муравьев-листорезов. PLoS Comput Biol 14 (10): e1006523. https://doi.org/10.1371/journal.pcbi.1006523
Редактор: Джессика К.Flack, Институт Санта-Фе, США
Поступила: 4 июня 2018 г .; Принята к печати: 21 сентября 2018 г .; Опубликовано: 11 октября 2018 г.
Авторские права: © 2018 Strömbom, Dussutour. Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все соответствующие данные находятся в документе, его вспомогательных информационных файлах и соответствующем коде.Соответствующий код можно загрузить с https://github.com/danielstrombom/StrombomDussutour2018/.
Финансирование: Авторы не получали специального финансирования на эту работу.
Конкурирующие интересы: Авторы заявили об отсутствии конкурирующих интересов.
Введение
Коллективное перемещение животных — широко распространенное явление, которое происходит в различных пространственных и временных масштабах в самых разных живых организмах, от клеток до пешеходов [1–4].Часто лидеры или координаторы отсутствуют, и координация группы зависит от полностью децентрализованного процесса. Глобальный паттерн явно не кодируется, но возникает в результате многочисленных взаимодействий между людьми, которые имеют доступ только к локальной и ограниченной информации [5–7].
Во многих ситуациях движение внутри коллектива является однонаправленным, потому что оно связано с миграционными явлениями и вовлекает людей, движущихся в одном направлении. Социальные насекомые и люди — одни из редких организмов, у которых движения внутри коллектива преимущественно двунаправленные [8–12].В частности, муравьи являются собирателями в центре и должны возвращаться в свое гнездо с пищей, собранной после каждого кормодобывающего события, что часто приводит к образованию тропинок с постоянным потоком движения между гнездом и источником пищи. У некоторых видов транспортный поток на этих тропах может быть чрезвычайно высоким, достигая более сотни муравьев в минуту, например красные древесные муравьи [13], муравьи-листорезы [14] и армейские муравьи [15]. Когда локальная концентрация особей на тропе очень высока, высокая частота лобовых столкновений может замедлить их движение [16–18].Эти эффекты могут спровоцировать групповые дисфункции и снизить общую эффективность кормодобывания колонии. Таких негативных эффектов можно избежать, если муравьи используют механизмы рассредоточения, позволяющие лучше организовать движение [8].
Движение муравьев может быть организовано как в пространственном, так и во временном масштабе [8]. Пространственная организация движения характеризуется разделением полос движения, т.е. потоки входящих и исходящих муравьев не полностью перемешаны [19–21], а временная организация потока характеризуется последовательностью чередующихся кластеров входящих и исходящих муравьев [16, 22].На сегодняшний день появление как пространственных, так и временных организаций, наблюдаемых в этих системах, остается в значительной степени необъяснимым. В частности, микроскопические правила движения, которым следуют отдельные муравьи при движении по тропам, в значительной степени неизвестны.
В попытке изолировать правила дорожного движения под микроскопом были проведены экспериментальные исследования организации движения муравьев-листорезов Atta colombica на узкой тропе [22] и на широкой тропе [20]. Следы муравьев-листорезов направляют рабочих к месту кормления и обратно, где они разрезают растительность на мелкие фрагменты и переносят их обратно в гнездо.Эти фрагменты затем включаются в грибок, которым питается колония. В экспериментах, чтобы добраться до источника листьев, муравьи были вынуждены двигаться либо по узкой тропе, позволяющей проходить только одной движущейся особи за раз [22], либо по широкой тропе, в десять раз большей [20]. На узкой тропе наблюдалась рассинхронизация входящего и исходящего трафика, включающая формирование чередующихся скоплений входящих и исходящих муравьев, а на широкой тропе наблюдалась степень сегрегации полос движения с муравьями-переносчиками листьев, перемещающимися почти исключительно по центральному участку тропы. описано.Обобщение результатов, полученных в ходе экспериментов, можно найти во вспомогательной таблице S1 (узкая трасса) и S2 (широкая трасса). Авторы предположили, что обе организации могут быть результатом набора местных правил приоритета, соблюдаемых на индивидуальном уровне, когда муравьи сталкиваются с другими муравьями на своем пути [20, 22]. Однако неизвестно, достаточны ли эти предлагаемые индивидуальные правила приоритета для создания наблюдаемой временной и пространственной организации трафика, и необходимо исследовать это моделирование.
Существует много хорошо известных моделей движения муравьев, большинство из которых являются моделями среднего поля, изучающими макроскопические свойства движения на тропах [23–31]. Однако для исследования трафика на групповом уровне, возникающего в результате повторяющихся локальных взаимодействий между движущимися людьми, более уместны так называемые модели самоходных частиц. Модели самоходных частиц — это пространственно-явные индивидуальные модели, в которых частицы локально взаимодействуют друг с другом в соответствии с набором правил.Эти модели варьируются от минимальных моделей, используемых для исследования фундаментальных свойств коллективного движения [32–35], до более сложных видоспецифичных моделей коллективного движения во всем: от клеток до насекомых, рыб, птиц, овчарок и пешеходов [9,10,36–44 ]. Подход модели самоходных частиц был успешно применен для моделирования движения муравьев у армейских муравьев [19] и черных садовых муравьев [45]. Однако в этих моделях не были выявлены характерные черты муравьев, выбегающих и связанных в гнездах, несмотря на то, что вариации в их маневренности и скорости существуют из-за транспорта пищи [22, 46].
Здесь мы представляем модель самоходных частиц для воспроизведения экспериментов с муравьями-листорезами Atta colombica на узкой тропе [22] и на широкой тропе [20], а также для исследования того, предложены ли в этих правилах местные правила приоритета исследований достаточно, чтобы воспроизвести наблюдаемую организацию движения.
Модели и методы
Модель для узкой тропы
Чтобы сфокусировать наше исследование на том, за какие макроскопические свойства трафика отвечают только локальные правила приоритета, мы упрощаем модель муравьев (частиц) несколькими способами.В частности, предполагается, что частицы имеют постоянную длину 1 см и постоянную скорость, зависящую от типа. Имитируя экспериментальную установку, частицы движутся по одномерному следу длиной 300 см, соединяющему гнездо и источник листьев. Частицы покидают гнездо и листовой источник в соответствии с пуассоновским процессом, характеризуемым параметром скорости μ. В начале каждой симуляции частицы присутствуют в гнезде и источнике листа. Следуя экспериментальной работе, мы рассматриваем три типа частиц: исходящие (O), входящие незагруженные (U) и загруженные частицы (L).Вероятность загрузки частицы при выходе из листового источника составляет 0,24, как наблюдали в эксперименте (таблица S1). Из-за небольшой разницы в скорости, наблюдаемой между исходящими (O) и порожними муравьями (U), мы установили скорость с OU = 2,3 см / с для обоих типов частиц. Скорость загруженных частиц (L) установлена на с L = 1,9 см / с (таблица S1).
На узком следе формула обновления положения для каждой частицы задается следующим образом: где x ( t ) — координата x частицы на следе в момент времени t (гнездо находится в x = 0, а листовой источник — в x = 300), s ∈ { s OU , s L } — скорость частицы, h ∈ {−1, 1} — направление частицы (1 для исходящего и -1 для входящих частиц) и Δ t = 0.1 — временной шаг. Значение δ ( t ) ∈ {0, 1} зависит от взаимодействий между частицами в момент времени t . δ ( t ) равно 1, если частица уступает дорогу, и 0, если частица останавливается и уступает дорогу. Две частицы взаимодействуют, когда они находятся на расстоянии 1 + 2 Δ t s OU друг от друга, чтобы учесть размер частиц. Взаимодействия между частицами определяются набором локальных правил приоритета, определенных в [22];
- 1.Незагруженная частица (U) не пытается пройти впереди загруженную частицу (L). Вместо этого он останавливается и ждет, пока груженый муравей не продвинется вперед достаточно, чтобы сделать еще один шаг.
- 2. Исходящая частица (O) останавливается и уступает место загруженной частице (L) и, возможно, ряду незагруженных частиц (U), следующих за загруженной частицей (см. «Кооперативное правило» ниже).
- 3. Ненагруженная частица (U) останавливается и уступает дорогу исходящей частице (O), если только исходящая частица (O) не ожидает после взаимодействия с загруженной частицей (см. «Кооперативное правило» ниже).
Чтобы охватить все возможности взаимодействия, мы также включили следующие два правила, количественно не описанные в [22];
- 4. Частица любого типа (O, L и U) не пытается пройти перед собой другую частицу того же типа. Вместо этого он останавливается и ждет, пока частица не продвинется вперед достаточно, чтобы сделать еще один шаг.
- 5. Загруженная частица (L) не останавливается для неподвижных входящих незагруженных частиц (U) впереди нее.
Кооперативное правило.
Когда исходящая частица уступает место загруженной частице, также может быть разрешено прохождение некоторого количества ( n = 0,1,…, 15) порожних частиц, следующих за груженым муравьем. Это явление было названо «правилом кооперации» в [22], и вероятность того, что n порожних муравьев извлекли выгоду из прохода груженого муравья таким образом в экспериментах, была количественно определена и представлена на (рис. 6 в [22]). ). Здесь мы используем экспериментально наблюдаемые вероятности и реализуем кооперативное правило следующим образом.Исходя из скорости частицы, порожней частице требуется приблизительно одна секунда, чтобы пройти неподвижную исходящую частицу сразу после прохождения загруженной частицы, а экспериментально определенная потеря времени на контакт составила 0,8 секунды (таблица S1). Таким образом, чтобы пропустить n незагруженных частиц, исходящая частица (O) ждет τ = 0,8 n секунд после встречи с загруженной частицей, прежде чем она снова начнет двигаться. Как только исходящая частица начинает двигаться, она снова имеет приоритет над незагруженными частицами.Правила движения частиц по узкой тропе приведены в Таблице 1.
В модели есть один неизвестный параметр: параметр скорости μ , связанный с пуассоновским процессом, определяющим поток частиц, покидающих гнездо и листовой источник. Из экспериментов [22] известно, что общее количество муравьев, пересекающих середину тропы за один час, в среднем составляло 5418,8 частиц (таблица S1). Используя моделирование, мы обнаружили, что общее значение μ = 1 дает поток 5347.2 (стандартное отклонение 73,5) более 1000 симуляций, поэтому мы использовали это при запуске симуляций для сравнения с экспериментами.
Модель для широкой тропы
Эксперимент с широким следом [20] проводился с использованием той же экспериментальной процедуры, что и в эксперименте с узким следом, и его результаты суммированы в таблице S2. Муравьев заставляли двигаться по тропе шириной 5 см и длиной 300 см, соединяющей гнездо и источник листьев (рис. 1). В дополнение к наблюдениям, сделанным в экспериментах по узкой тропе на широкой трассе, была также количественно оценена пространственная организация движения.Количество и вид муравьев (O, U и L), проходящих середину тропы в трех разных зонах; были зарегистрированы центральная зона (ширина 2,5 см) и две краевые зоны (каждая 1,25 см шириной) (рис. 1).
Основное различие между настройками узкого и широкого следа состоит в том, что у муравьев / частиц есть место для включения широкого следа, поэтому они не вынуждены останавливаться при встрече с муравьем / частицей с более высоким приоритетом. Вместо этого муравей / частица может повернуться, чтобы избежать столкновения, и мы адаптировали модель узкого следа к широкому следу, заменив все случаи остановки на поворот.Правила движения частиц по широкой тропе представлены в таблице 2.
Формула обновления положения для каждой частицы в модели с широким следом: где x ( t ) — координата x частицы на следе в момент времени t (гнездо x = 0, а листовой источник x = 300), w ( t ) — координата w частицы в момент времени t (стенки расположены в w = 0 и w = 5), s ∈ { s OU , с L } — скорость частицы, Δ t = 0.1 — временной шаг, а θ (t) — это заголовок частицы в момент времени t . Заголовок θ ( т ) = θ d + θ I ( т ) состоит из двух компонентов: θ d ∈ {0 , π }, который равен 0 для исходящих частиц и π для входящих частиц, и θ I ∈ {- π / 2,0, π /2}, что является поворотным угол возникает в результате взаимодействия и зависит от правил дорожного движения (таблица 2).Во время взаимодействия частица i не повернется ( θ I = 0), если ей уступает место частица j . Повернется, если его не помешает частица j . В последнем случае он появится, если w i ( t ) ≥ w j ( t ), или вниз, если w i ( t ) < w j ( t ).Обратите внимание, что когда частица поворачивает, ее смещение в направлении x равно 0, потому что, таким образом, ее прибытие к месту гнезда / листа задерживается на Δ t = 0,1 с на каждый временной шаг поворота.
Кооперативное правило, согласно которому порожние следуют за груженым, иногда разрешен проход, не имеет отношения к настройке широкого следа, потому что частицы вращаются, а не останавливаются. Как и в случае с узким следом, мы используем экспериментально наблюдаемый общий поток, чтобы установить параметр скорости μ , связанный с пуассоновским процессом муравьев, покидающих гнездо и источник листьев.Средний поток в экспериментах с широким следом составлял 8803 муравьев / час, а выбор μ = 0,8 приводит к расходу 8999,4 (стандартное отклонение 97,8), и мы используем это значение для моделирования. В отличие от случая с узкой тропой, где все муравьи входили и двигались по тропе в одном и том же вертикальном положении, на широкой тропе муравьи выходили на тропу из гнезда через небольшое отверстие, расположенное в центре тропы, и из источника листьев через узкую деревянную дорожку. палка прикреплена к центру следа. Итак, муравьи вошли близко к центру по обе стороны тропы, а затем рассеялись в направлении w.Чтобы смоделировать это, мы предполагаем, что вертикальная позиция входа ( w (0)) для каждого муравья обычно распределена со средним значением 2,5 (центр следа) и стандартным отклонением 0,8. Это гарантирует, что почти все позиции входа находятся между 0 и 5, и если сгенерированное w (0)> 5, мы устанавливаем w (0) = 4,99, а если w ( 0 ) <0, мы устанавливаем w (0) = 0,01.
Для анализа модели мы выполнили 1000 симуляций и рассчитали долю каждого типа частиц в каждой зоне следа, в дополнение к среднему и максимальному размеру группы, и сравнили результаты с экспериментальными результатами (таблица S2).Мы также провели ряд симуляций с заменой поворота на остановку, как на узкой тропе, чтобы исследовать причинные эффекты поворота в отношении пространственной организации на широком мосту.
Результаты
Сравнительная модель-эксперимент для узкой тропы
Главный экспериментальный результат заключался в том, что рассинхронизация входящего и исходящего трафика происходила на узкой тропе, которая включала формирование чередующихся групп входящих и исходящих муравьев. Рассинхронизация этого типа также возникла при моделировании модели, и полученные группы имеют несколько общих свойств с экспериментально наблюдаемыми группами.См. S1 Fig для иллюстрации концепции десинхронизации. В [22] для количественной оценки организации движения и структуры групп использовались четыре статистических показателя: (i) распределение групп по размеру, (ii) доля груженых муравьев в группах размером N , (iii) доля груженых муравьев на месте. P в группе, и (iv) соотношение групп размером N , возглавляемых груженым муравьем. Сравнение экспериментально наблюдаемых распределений и распределений, полученных в результате моделирования, представлено на рис.2.Мы видим, что в целом распределения, полученные в результате моделирования, сопоставимы с распределениями, полученными в ходе экспериментов. В частности, для групп размером больше 1 экспериментальные средние по существу находятся в пределах минимальных и максимальных значений распределений, созданных при моделировании для всех четырех статистических показателей. Основное несоответствие между симуляциями и экспериментами — это чрезмерная представленность групп размером 1 в распределении размеров групп, созданном симуляциями (рис. 2A). Кроме того, максимальный размер группы, наблюдаемый в экспериментах, составлял 74 (таблица S1), а в моделировании — 77 , а средний размер группы, наблюдаемый в экспериментах, составлял 5 . 2 (таблица S1) и в моделировании 4 . 2 .
Рис. 2. Сравнительная модель-эксперимент для узкой тропы.
На каждом графике синие кривые представляют экспериментальные средние, а значения соответствуют значениям, представленным на рисунках 2–5 в [22]. Красные звездочки обозначают средства моделирования, а черные линии обозначают максимум и минимум более 1000 симуляций.
https://doi.org/10.1371/journal.pcbi.1006523.g002
Сравнительная модель-эксперимент для широкой тропы
Главный результат эксперимента заключался в том, что на широкой тропе наблюдалась определенная степень сегрегации полос движения.Груженые муравьи, возвращающиеся в гнездо, перемещались в основном в центральной зоне тропы, а порожние муравьи (U) чаще путешествовали в краевых зонах тропы. Что касается муравьев (O), то около двух третей из них путешествовали по центральной зоне тропы. Звездочки на рис. 3A и 3B показывают результаты для каждого типа муравьев в каждом из 12 экспериментов. Коробчатые диаграммы представляют соответствующие измерения при моделировании с использованием модели широкого моста с использованием правила поворота (рис. 3A) или правила остановки (рис. 3B).Мы обнаружили, что модель с широким мостом, использующая правило поворота, воспроизводит общую тенденцию движения загруженных частиц почти исключительно в центральной зоне и исходящих частиц, перемещающихся в центральной зоне чаще, чем входящих частиц без нагрузки (рис. 3A). Мы также обнаружили, что при моделировании средний размер группы составлял 2,0, а максимальный размер группы 23, по сравнению с экспериментальным средним размером группы 1,9 и максимальным размером группы 14 (таблица S2). Кроме того, рис. 3B показывает, что, когда правило поворота заменяется правилом остановки, разделения полос движения не возникает, и мы делаем вывод, что разделение полос движения критически зависит от поворота в нашей модели.
Рис. 3. Сравнительная модель-эксперимент для широкой тропы.
Звездочки обозначают долю муравьев определенного вида, путешествующих в центральной зоне по следу в экспериментах. Прямоугольники представляют собой соответствующие измерения более 1000 симуляций (красные кресты представляют выбросы): (A) Модель широкого следа с правилом поворота и (B) Модель широкого следа с правилом остановки вместо правила поворота.
https://doi.org/10.1371/journal.pcbi.1006523.g003
Обсуждение
Наша модель самоходных частиц, основанная на локальных правилах приоритета, представленных в [22], генерирует организацию движения, которая имеет несколько общих характеристик с организацией движения, наблюдаемой в экспериментах с узким и широким следом. В частности, модель узкого следа воспроизводит рассинхронизацию входящего и исходящего трафика, и возникающие группы имеют несколько общих черт с экспериментально наблюдаемыми группами (рис. 2). Модель широкого следа генерировала сегрегированный трафик, который разделяет определенные свойства с трафиком, наблюдаемым в экспериментах (рис. 3).В частности, доля муравьев данного типа (L, O или U), путешествующих в центральной зоне, увеличивалась с приоритетом каждого типа (L> O> U) как в модели, так и в эксперименте.
Это говорит о правдоподобности того, что правила приоритета, предложенные в [22], являются ключевыми движущими силами организации трафика на этих трассах, потому что основные характеристики наблюдаемого трафика проистекают из них, даже когда остальная часть системы сильно идеализирована. Например, мы используем упрощенные модели муравьев с постоянной скоростью и длиной, которые всегда следуют правилам, и единственные стохастические компоненты в моделях связаны со временем выхода и позициями входа.В частности, мы считаем, что строгое следование правилу приводит к основному несоответствию между результатами моделирования и данными, то есть чрезмерному представлению групп размера 1 на узкой тропе (рис. 2A). Мы также знаем, что введение в модель различных типов стохастических нарушений правил не решает эту проблему, и мы уверены, что нарушения правил далеки от случайного возникновения, и для изучения этого потребуются новые эксперименты. Однако, хотя было бы интересно и потенциально полезно провести новые эксперименты для получения данных, которые позволят нам сделать определенные аспекты модели более реалистичными, это неизбежно сделало бы модель более сложной и, таким образом, затруднило бы изолирование эффектов общих механизмов, лежащих в основе организация движения.
Понимание основных принципов организации движения по тропам и определение факторов, влияющих на передвижения муравьев по тропам, имеют фундаментальное значение в биологии социальных колоний насекомых. Когда муравьев заставляли двигаться по узкой тропе, наблюдалось формирование чередующихся групп входящих и исходящих муравьев. Группы прилетающих муравьев часто возглавлялись гружеными муравьями, которые действуют медленнее, за ними следовали порожние муравьи. Модель воспроизводит это поведение, скорее всего, из-за правила, согласно которому входящие порожние муравьи не пытаются догнать груженых муравьев перед ними (Правило 1).Такое поведение может показаться пагубным, потому что порожние муравьи движутся медленнее, оставаясь позади груженого муравья, вместо того, чтобы двигаться быстрее, двигаясь с желаемой скоростью. Однако модель также включает так называемое кооперативное правило, которое допускает возможность того, что порожние муравьи следуют за груженым муравьем, чтобы извлечь выгоду из прохождения груженого (см. Правила 2 и 3). Эти порожние муравьи избегают лобовых столкновений с вылетающими муравьями и, таким образом, теряют свободное время, останавливаясь, как обычно, когда они встречают убегающего муравья.Более того, эта организация способствует передаче информации об уровне доступности листа за счет увеличения количества контактов между исходящими и входящими нагруженными муравьями, которые стимулируют первых разрезать и извлекать фрагменты листа по достижении конца следа [47–53]. Следуя той же идее, на широком следе смешанный поток исходящих и порожних муравьев вместо строгого разделения полос может показаться неоптимальным, но на самом деле это способствует передаче информации между муравьями и стимулирует выезжающих рабочих срезать и собирать листовой материал на месте. конец следа, что способствует повышению эффективности кормодобывания [8, 20, 48, 49].
Наши результаты показывают, что муравьи могут использовать одни и те же общие правила приоритета на обоих тропах, а наблюдаемые различия связаны с ограничениями, налагаемыми окружающей средой. В частности, на более широкой тропе есть место для поворота во время столкновения, тогда как на узкой тропе эта опция недоступна, поэтому муравьи должны останавливаться, уступая дорогу. Фактически, из-за простоты этих правил мы считаем, что они могут быть применимы, с соответствующими модификациями, для других видов муравьев в аналогичных условиях.Например, такое же правило приоритета между груженым и порожним муравьями наблюдалось у другого муравья-листореза Atta cephalotes [47] и у красного древесного муравья Formica rufa [13]. Кроме того, аналогичные типы правил приоритета, вероятно, будут действовать и для армейских муравьев, потому что возвращающиеся груженые муравьи, как известно, менее мобильны и обладают меньшей маневренностью, чем исходящие муравьи без груза [46]. Отметим также, что существует соответствие между правилами приоритета и потенциальной полезностью каждого типа муравьев в отношении сбора листьев.Груженые муравьи имеют наивысший приоритет, и их — это , собирающие листья, исходящие муравьи имеют второй высший приоритет, и они потенциально — , собирающие листья, а входящие незагруженные муравьи имеют самый низкий приоритет, и они не являются собирающими листья. Мы предполагаем, что правила приоритета у других видов, вероятно, будут соответствовать потенциальной полезности каждого типа муравьев в отношении кормовой активности колонии.
Наша модель отличается от более ранних spp-моделей трафика муравьев по нескольким параметрам.В частности, мы моделируем три типа муравьев (исходящие, порожние и груженые), тогда как [19,45] включают только два; входящий и исходящий, и эти два типа по существу идентичны, за исключением разной скорости поворота при уклонении в [19]. Более того, скорость уклонения от поворота одинакова для всех особей определенного типа, т.е. исходящих или прибывающих, несмотря на тот факт, что у реальных муравьев есть различия в маневренности и скорости из-за транспортировки пищи [22, 46]. Наша модель включает эту изменчивость, и наши правила приоритета достаточно гибки, чтобы моделировать трафик как на узких, так и на широких трассах.В [19,45] моделируется только движение по более широким тропам, и хотя подход с уклонением от скорости поворота может быть изменен для работы на узких тропах, по которым, предположительно, и армейские муравьи [19], и черные садовые муравьи [45] иногда путешествуют в дикой природе. , мы прогнозируем, что, если входящий поток не разделен на порожних и загруженных муравьев с различным поведением, модель не сможет генерировать трафик, совместимый с реальным трафиком муравьев [16].
Часто думают о сходстве между движением муравьев, пешеходным движением и движением транспортных средств.Эти аналогии послужили поводом для многочисленных исследований [54–58]. Однако даже если на первый взгляд движение по муравьиным следам может показаться похожим на движение людей, есть важные различия, которые следует учитывать при сравнении их организации движения. Во-первых, движение муравьев носит кооперативный характер, потому что все муравьи преследуют общую цель, а именно собирать пищу для колонии. Во-вторых, у муравьев нет таких же механических ограничений, как у пешеходов или транспортных средств. Из-за своей малой массы они имеют низкую инерцию и не повреждаются при столкновении, что позволяет в определенной степени смешивать противоположные потоки на тропах кормодобывания.Несмотря на это, движение муравьев остается важным источником вдохновения для различных исследователей, работающих с большими группами взаимодействующих частиц в таких разнообразных дисциплинах, как молекулярная биология [59], статистическая физика [60] и телекоммуникационные науки [61].
Вспомогательная информация
S1 Таблица. Краткое изложение эксперимента с узким следом и его результатов.
Из [22] на основе 12 повторностей. Тропа, соединяющая гнездо с источником пищи, имела ширину 0,5 см и длину 300 см. Поток муравьев, покидающих гнездо (исходящие муравьи), и поток, покидающий источник листьев (входящие муравьи), подсчитывали с интервалами в 1 минуту в течение 1 часа, а также измеряли долю груженых муравьев во входящем потоке.Было количественно определено формирование групп последовательных муравьев, движущихся в одном направлении в последовательности муравьев, наблюдаемых на тропе. На индивидуальном уровне измеряли скорость муравьев и исход лобовых столкновений между муравьями (правило приоритета). Были выделены четыре типа муравьев: исходящие муравьи (O), (входящие) порожние муравьи (U), (входящие) груженые муравьи (L) и порожние муравьи, следующие за груженым муравьем (U (L)). Был проанализирован результат лобового столкновения между вылетающими муравьями и гружеными муравьями (O vs L), исходящими муравьями и муравьями без нагрузки (O против U), а также муравьями без нагрузки и гружеными муравьями (U против L).Обычно после столкновения один муравей перемещается в сторону следа (СТОП), чтобы пропустить приближающегося муравья (ХОДЬБА). Была измерена потеря времени на столкновение, и она не различалась в зависимости от типа муравьев. Когда один муравей уступал место другому, он обычно уходил в сторону от тропы и позволял муравью пройти. Следующие муравьи могут извлечь выгоду из прохода ведущего муравья (муравья, которому уступили дорогу), прежде чем муравей, который уступил дорогу, вернется на вершину следа. Этот последний эффект соответствует кооперативному поведению муравьев, потому что последующие муравьи извлекают выгоду из прохождения ведущего муравья.Вероятность того, что муравей получит пользу от прохода ведущего муравья, зависит как от его положения в качестве ведомого, так и от категории ведущего муравья (O, U или L). N указывает количество наблюдений, использованных для получения среднего значения или правила.
https://doi.org/10.1371/journal.pcbi.1006523.s001
(DOCX)
S2 Таблица. Краткое изложение эксперимента с широким следом и его результатов.
Из [20] на основе 12 повторов. Тропа, соединяющая гнездо с источником пищи, имела ширину 5 см и длину 300 см.Поток муравьев, покидающих гнездо (выходящие муравьи) и выходящих из источника пищи (входящие муравьи), подсчитывали с интервалами в 1 минуту в течение 1 часа, а также измеряли долю груженых муравьев во входящем потоке. Было количественно определено формирование групп последовательных муравьев, движущихся в одном направлении в последовательности муравьев, наблюдаемых на тропе. На индивидуальном уровне измеряли скорость муравьев и исход лобовых столкновений между муравьями (правило приоритета). Были выделены три типа муравьев: муравьи-вылетевшие (O), порожние (U) муравьи и груженые муравьи (L).Были проанализированы результаты лобовых столкновений между исходящими муравьями и входящими гружеными муравьями (O vs L), а также исходящими муравьями и входящими муравьями без нагрузки (O vs U). Обычно после столкновения один муравей поворачивается (ПОВОРОТ), чтобы пропустить приближающегося муравья (ХОДЬБА). N указывает количество наблюдений, использованных для получения среднего значения или правила.
https://doi.org/10.1371/journal.pcbi.1006523.s002
(DOCX)
S1 Рис. Иллюстрирующий концепцию рассинхронизации входящего и исходящего трафика.
В момент времени 0 есть исходящие частицы (красные точки), входящие незагруженные частицы (синие точки) и входящие загруженные частицы (черная точка) около середины следа. Со временем красные частицы будут двигаться к источнику листьев (справа), а черные и синие частицы — к гнезду (слева), и когда частица пересекает середину следа, мы записываем пересечение как +1, если оно исходящее, — 1, если входящий порожний, и -2, если входящий загружен. Отметим, что на временных шагах 1 и 2 мы фиксируем входящие пересечения (-1).На временном шаге 3 происходит первое взаимодействие, при котором одна незагруженная частица сходит со следа, уступая дорогу бегущему муравью. Этот процесс продолжается в соответствии с правилами модели, и к временному шагу 14 мы собрали последовательность -1, -1, + 1, + 1, + 1, -2, -1, -1, -1, и из этого мы вычисляем размер группы путем подсчета последовательных записей с одним и тем же знаком. Здесь у нас сначала была группа из 2 входящих частиц (-1, -1), затем группа из 3 исходящих частиц (+ 1, + 1, + 1), а затем группа из 4 входящих частиц (-2, -1 , -1, -1).Это явление упоминается как десинхронизация входящего и исходящего трафика, включая формирование чередующихся групп входящих и исходящих муравьев в [22], и мы используем здесь ту же терминологию для частиц.
https://doi.org/10.1371/journal.pcbi.1006523.s003
(TIF)
Благодарности
Мы благодарны Сэмюэлю Бешерсу за то, что он позволил нам использовать его лабораторное оборудование.
Ссылки
- 1. Самптер Д.Коллективное поведение животных. Издательство Принстонского университета; 2010.
- 2. Вичек Т., Заферидис А. Коллективное движение. Phys Rep.2012; 517: 71–140.
- 3. Пэрриш Дж., Хамнер В. Группы животных в трех измерениях. Издательство Camtrail University Press; 1997.
- 4. Хеппнер Ф. Птичьи летные образования. Кольцевание птиц. 1974; 45: 160–169.
- 5. Camazine S, Deneubourg JL, Franks N, Sneyd J, Theraulaz G и др. Самоорганизация в биологических системах.Издательство Принстонского университета; 2001.
- 6. Пэрриш Дж., Вискидо С., Грюнбаум Д. Самоорганизованные косяки рыб: исследование новых свойств. J. Comp Physiol. 2001; 135: 315–325.
- 7. Кузин И., Краузе Я. Самоорганизация и коллективное поведение позвоночных. Adv Stud Behav. 2003; 32: 1–75.
- 8. Фуркассе V, Дюссютур А, Денебург JL. Правила дорожного движения Ant. J Exp Biol. 2010; 213: 2357–2363. pmid: 20581264
- 9. Хелбинг Д., Молнр П., Фаркас И., Болай К.Самоорганизующееся пешеходное движение. Environ Plann B. 2001; 28: 361–383.
- 10. Муссаид М., Хелбинг Д., Тераулаз Г. Как простые правила определяют поведение пешеходов и стихийные бедствия. Proc Natl Acad Sci USA. 2011; 108: 6884–6888. pmid: 21502518
- 11. Муссаид М., Гийо Э., Моро М., Ференбах Дж., Шабирон О. и др. Нестабильность движения в самоорганизованных пешеходных толпах. PLoS Comput Biol. 2012; 8 (3): e1002442. pmid: 22457615
- 12. Джон А., Шадшнайдер А., Чоудхури Д., Нишинари К.Коллективные эффекты в движении по двунаправленным муравьиным тропам. J Theor Biol. 2004; 231: 279–285. pmid: 15380392
- 13. Холт С. О кормовой активности лесного муравья. J Anim Ecol. 1955; 24: 1–34.
- 14. Вирт Р., Херц Х., Рил Р., Бейшлаг В., Хельдоблер Б. Растительноядность муравьев-листорезов: тематическое исследование Atta colombica в тропических лесах Панамы. Springer Science & Business Media; 2013.
- 15. Готвальд WH.Армейские муравьи: биология социального хищничества. Издательство Корнельского университета; 1995.
- 16. Дюссютур А., Денебург Ю.Л., Фуркассе В. Временная организация двунаправленного движения в муравье Lasius niger . J Exp Biol. 2005; 208: 2903–2912. pmid: 16043595
- 17. Дюссютур А., Николис С., Денебург Дж. Л., Фуркассе В. Коллективные решения муравьев при кормлении в условиях скопления людей. Behav Ecol Sociobiol. 2006; 61: 17–30.
- 18. Бурд М., Аранвела Н.Частота встреч и скорость ходьбы собирателей в потоке муравьев-листорезов. Insectes Soc. 2003; 50: 3–8.
- 19. Кузин И., Фрэнкс Н. Самоорганизация полосы движения и оптимизация транспортного потока у армейских муравьев. Proc R Soc Lond B. 2003; 270: 139–146.
- 20. Дюссютур А. Организация пространственно-временного размещения коллекционеров chez les fourmis. Докторская диссертация, Тулуза 3; 2004
- 21. Хенике К., Блисс П. и Мориц Р. Ф.(2015). Влияние плотности движения и скорости движения стволов Formica pratensis. Наука о природе, 102 (3–4), 17. pmid: 25813053
- 22. Дуссютур А., Бешерс С., Денебург Дж. Л., Фуркасси В. Правила приоритета регулируют организацию движения по кормовым тропам у муравьев-листорезов Atta colombica . J Exp Biol. 2009; 212: 499–505. pmid: 1
- 97
- 23. Денебург Дж. Л., Госс С., Фрэнкс Н., Пастилс Дж. Слепой, ведущий слепого: моделирование химически опосредованных паттернов налетов армейских муравьев.J Insect Behav. 1989; 2: 719–725.
- 24. Стикленд Т., Бриттон Н., Фрэнкс Н. Алгоритмы поиска пищи для муравьев. Naturwissenschaften. 1993; 80: 427–430.
- 25. Стикленд Т., Бриттон Н., Фрэнкс Н. Сложные следы и простые алгоритмы поиска пищи для муравьев. Proc R Soc B. 1995; 260: 53–58.
- 26. Бриттон Н., Стикленд Т., Фрэнкс Н. (1998) Анализ алгоритмов кормодобывания муравьев. J Biol Syst 6: 315–336.
- 27. Николис С., Денебур Ж.Л.Новые модели и набор пищи у муравьев: аналитическое исследование. J Theor Biol. 1999; 198: 575–592. pmid: 10373356
- 28. Бикман М., Самптер Д., Ратниекс Ф. Фазовый переход между неупорядоченным и упорядоченным кормлением у муравьев-фараонов. Proc Natl Acad Sci USA. 2001; 98: 9703–9706.
- 29. Dussutour A, Fourcassié V, Helbing D, Deneubourg JL. Оптимальная организация движения муравьев в условиях скопления людей. Природа. 2004; 428: 70–73. pmid: 14999281
- 30.Джонсон К., Росси Л. Математическое и экспериментальное исследование динамики следа кормления муравьев. J theor Biol. 2006; 241: 360–369. pmid: 16442564
- 31. Джон А., Шадшнайдер А., Чоудхури Д., Нишинари К. Транспортное коллективное движение муравьев по тропам: отсутствие застрявшей фазы. Phys Rev Let. 2009; 102: 108001
- 32. Vicsek T, Czirók A, Ben-Jacob E, Cohen I, Shochet O. (1995) Новый тип фазового перехода в системе самодвижущихся частиц.Phys Rev Let. 1995; 7: 1226–1229.
- 33. Стрёмбом Д. Коллективное движение от местного притяжения. J Theor Biol. 2011; 283: 145–151. pmid: 21620861
- 34. Романчук П., Кузин И., Шиманский-Гейер Л. Коллективное движение из-за индивидуального побега и реакции преследования. Phys Rev Let. 2009; 102: 010602.
- 35. Стрёмбом Д., Сильестам М., Парк Дж., Самптер Д. Форма и динамика местного притяжения. Eur Phys J ST. 2015; 224: 17–18.
- 36.Аоки И. Имитационное исследование механизма стайной у рыб. Бык Япония Soc Sci Fish. 1982; 48: 1081–1088
- 37. Хут А., Виссел С. Моделирование движения косяков рыб. J Theor Biol. 1991; 156: 365–385.
- 38. Couzin I, Krause J, James R, Ruxton G, Franks N. Коллективная память и пространственная сортировка в группах животных. J Theor Biol. 2002; 218: 1–11. pmid: 12297066
- 39. Исобе М., Хелбинг Д., Нагатани Т. Эксперимент, теория и моделирование эвакуации из комнаты без видимости.Phys Rev E. 2004; 68: 6884–6888.
- 40. Hemelrijk C, Kunz H. Распределение плотности и сортировка по размеру в косяках рыб: индивидуальная модель. Behav Ecol. 2005; 16: 178–187.
- 41. Пэрриш Дж., Вискидо С. Правила движения косяков рыб: обзор агентных подходов. В: Hemelrijk C Editor. Самоорганизация и эволюция социального поведения; 2005.
- 42. Hildenbrandt H, Carere C, Hemelrijk C. Самоорганизованные воздушные показы тысяч скворцов: модель.Behav Ecol. 2010; 21: 1349–1359.
- 43. Люкман Р., Ли Х, Эдельштейн-Кешет Л. Вывод индивидуальных правил из коллективного поведения. Proc Natl Acad Sci USA. 2010; 107: 12576–80. pmid: 20616032
- 44. Стрембом Д., Манн Р., Уилсон А., Хейлс С., Мортон А. и др. Решение пастырской проблемы: эвристика для выпаса автономных, локально взаимодействующих агентов. JR Soc Interface 2014; 11.100: 20140719.
- 45. Кутсу А., Хе С. Изучение организации движения муравьев в условиях скопления людей с использованием индивидуального моделирования и эволюционных вычислений.IEEE Trans Evol Comput. 2009; 2: 25–41.
- 46. Золликофер С. Ходячие движения муравьев — влияние морфологии тела. J Exp Biol. 1994; 192: 107–118. pmid:36
- 47. Бурд М., Арчер Д., Аранвела Н., Стрэдлинг Д. Динамика движения листорезов и, Atta cephalotes . Am Nat. 2002; 159: 283–293. pmid: 18707380
- 48. Дюссютур А., Бешерс С., Денебург Дж. Л., Фуркасси В. Скучивание увеличивает продуктивность кормления у муравьев-листорезов Atta colombica .Insectes Soc. 2007; 54: 158–165.
- 49. Дюссютур А., Денебург Дж. Л., Бешерс С. и Фуркассе В. (2009). Индивидуальное и коллективное решение проблем в контексте кормодобывания у муравья-листореза Atta colombica. Познание животных, 12 (1), 21.
- 50. Фарджи-Бренер А., Шиншилла Ф., Рифкин С., Куэрво А.С., Триана Е. и др. «Эффект водителя грузовика у муравьев-листорезов: как отдельный груз влияет на скорость ходьбы сородичей». Physiol Entomol. 2011; 36: 128–134.
- 51. Роцес Ф., Боллацци М. Передача информации и организация кормодобывания травоядных и листорезных муравьев. В: Jarau S, Hrncir M Editors. Использование пищевых продуктов социальными насекомыми: экологический, поведенческий и теоретический подходы. CRC Press; 1999.
- 52. Бушебти С., Феррере С., Виттори К., Латиль Г., Дассютур А. и Фуркассе В. (2015). Частота контакта регулирует эффективность кормодобывания у муравьев-листорезов. Научные отчеты, 5, 18650. pmid: 26686557
- 53.Сибилс-Мартина Л., Элизальде Л. и Фарджи-Бренер А. Г. Правила дорожного движения за углом: ходьба муравьев-листорезов по точкам ветвления на тропах стволов. Insectes Sociaux, 1–7.
- 54. Нишинари К., Сугавара К., Казама Т., Шадшнайдер А., Чоудхури Д. Моделирование самодвижущихся частиц: муравьи-собиратели и пешеходы. Physica A. 2006; 372: 132–141.
- 55. Паризи Д. Р., Сория С. А., Хосенс Р. Повторный визит к эффекту «быстрее — медленнее» при побеге муравьев: муравьи не ведут себя как люди.Безопасность наук. 2015; 72, 274–282.
- 56. Готтлиб Дж., Пухта М., Солнон С. Исследование подходов к жадному поиску, локальному поиску и оптимизации колоний муравьев для задач определения последовательности автомобилей. В: Springer Berlin Heidelberg. Приложения эволюционных вычислений (.; 2004; 246–257.
- 57. Шадшнайдер А., Кирхнер А., Нишинари К. От муравьиных троп к пешеходной динамике. Appl Bionics Biomech. 2003; 1, 11–19.
- 58. Джон А., Шадшнайдер А., Чоудхури Д., Нишинари К.Характеристики транспортного потока, вдохновленного муравьями. Swarm Intell. 2008; 2, 25–41.
- 59. Табони Дж. Микротрубочки как колонии молекулярных муравьев. Biol Cell. 2006; 98: 603–617. pmid: 16968217
- 60. Чоудхури Д., Нишинари К., Шадшнайдер А. Самоорганизованные модели и транспортный поток в колониях организмов: от бактерий и социальных насекомых до позвоночных. Фазовый переход. 2004; 77: 601–624.
- 61. Блюм К. Оптимизация колонии муравьев: введение и последние тенденции.Phys Life Rev.2005; 2: 353–373.
Основы безопасности дорожного движения Блок 1: Основы безопасности дорожного движения
Концепции, стратегии и методы снижения смертности и травматизма на дорогах
Министерство транспорта США, Федеральное управление шоссейных дорог
РАЗДЕЛ 1: Основы безопасности дорожного движения
Задачи обучения
После прочтения глав и выполнения упражнений в Блоке 1 читатель сможет:
- ОПИСАТЬ важность безопасности дорожного движения и ее связь с общественным здравоохранением, экономическими, экологическими и демографическими тенденциями
- ПРИЗНАТЬ роли и обязанности различных дисциплин и подходов к повышению безопасности дорожного движения
- РАЗЛИЧИЕ между номинальной и основной безопасностью
- ОПРЕДЕЛИТЕ ключевые моменты в истории безопасности дорожного движения в США.S., включая ключевые законодательные акты и создание агентств, и понять, как эти решения повлияли на сегодняшние дороги
- ОПРЕДЕЛЕНИЕ различных групп участников дорожного движения и задач, уникальных для каждой группы
Глава 1 — Контекст безопасности дорожного движения
Безопасность дорожного движения — важная часть повседневной жизни. По всей стране люди используют дороги и тротуары, чтобы добраться до работы, школы, магазинов и дома. Государственные агентства работают над тем, чтобы люди прибыли в пункт назначения без происшествий.
Однако не все поездки обходятся без происшествий. Смерть и травмы в результате дорожно-транспортных происшествий представляют серьезную проблему для общественного здравоохранения. По оценкам Всемирной организации здравоохранения (ВОЗ), в автокатастрофах ежегодно погибает более 1 миллиона человек во всем мире и от 20 до 50 миллионов получают серьезные травмы. 1 Эти аварии затрагивают всех участников дорожного движения, от водителей транспортных средств и пассажиров до пешеходов, велосипедистов и пользователей общественного транспорта.
Хотя безопасность дорожного движения в U.Состояние S. неуклонно улучшалось с течением времени, он остается приоритетом для транспортных агентств, законодателей и правозащитных организаций. За последние 10 лет в США ежегодно погибало в среднем около 37000 человек и примерно 2,3 миллиона человек получали травмы в автокатастрофах. 2 Хотя многие из этих смертей и травм получают пассажиры и водители автотранспортных средств, они также затрагивают мотоциклистов, пешеходов, велосипедистов и пользователей транзитных транспортных средств. Эта задача требует комплексного подхода к повышению безопасности с участием множества заинтересованных сторон и лиц, принимающих решения, с разных точек зрения и дисциплин.
Определение безопасности
Частота сбоев
Количество аварий, происходящих за год или другую единицу времени.
Частота сбоев
Количество аварий, нормализованное по конкретной совокупности или метрике воздействия.
Результат аварии
Измеряется по типам травм, полученных людьми, участвовавшими в аварии.
Номинальная безопасность
Абсолютное заявление о безопасности объекта, основанное только на его соответствии определенному набору стандартов проектирования и связанных с ними критериев.
Основная безопасность
Историческая и долгосрочная объективная безопасность места на основе данных о ДТП.
Проще говоря, безопасность можно определить как отсутствие риска или опасности. Если рассматривать этот термин как транспорт, безопасность дорожного движения можно охарактеризовать как способность человека свободно передвигаться без травм или смерти. Совершенно безопасная транспортная система не допускает столкновений между различными участниками дорожного движения. Хотя отсутствие всех аварий является оптимальным условием, и многие транспортные агентства ставят цель свести к минимуму смертность на дорогах, реальность такова, что люди по-прежнему получают травмы или гибнут на улицах и шоссе по всей стране.Задача, стоящая перед областью безопасности дорожного движения, состоит в том, чтобы свести к минимуму частоту аварий и связанных с ними смертей и травм, используя все доступные в настоящее время инструменты, знания и технологии. Эта задача усложняется из-за множества факторов, влияющих на безопасность, от инфраструктуры до конструкции транспортных средств и поведения человека.
Специалисты по безопасности дорожного движения обычно измеряют безопасность по количеству и частоте аварий, а также по их серьезности. Частота сбоев или количество сбоев, происходящих в год или в другую единицу времени, является еще одним широко используемым показателем.Частота сбоев — это количество аварий, нормализованное по конкретной группе или метрике подверженности. Обычно упоминаемые показатели аварийности включают количество аварий на 100 000 человек, живущих в определенном штате, городе или стране. Некоторые показатели аварийности представляют собой количество аварий на милю пройденного пути или количество лицензированных водителей. Результаты ДТП можно измерить по типам травм, полученных людьми, участвовавшими в ДТП, которые обычно классифицируются по смертности и тяжести травм. Сосредоточение внимания на авариях, приводящих к тяжелым травмам и смертельному исходу, — это одна из стратегий, которую агентства используют для определения приоритетов своей деятельности по обеспечению безопасности.
В дополнение к мерам, описанным выше, специалисты по безопасности могут использовать суррогатные меры, такие как конфликты (опасные ситуации), маневры уклонения и время до столкновения, если не предпринимаются действия по уклонению, для определения уровня риска для безопасности и выявления конкретных проблем. . Проблемы с безопасностью могут существовать даже в местах, в которых не было подтвержденных аварий, точно так же, как курильщики подвержены более высокому риску рака легких, даже если рак еще не обнаружен. Это может быть особенно актуально для безопасности немоторизованных участников дорожного движения, таких как пешеходы и велосипедисты, поскольку аварии с участием этих участников дорожного движения могут быть нечастыми и на первый взгляд казаться случайными.В таких местах, где аварии редки или распределены по системе, специалисты по безопасности могут использовать суррогатные меры, чтобы заполнить пробелы и оценить уровень риска дороги. Например, наблюдение за движением на перекрестке может выявить закономерности возможных промахов и других конфликтов между транспортными средствами и пешеходами. Эта закономерность может не отображаться в данных о ДТП, но может быть ценным источником информации, подчеркивающей потенциальную угрозу безопасности.
Восприятие безопасности также является важным фактором при выборе путешествия.Есть ряд причин, по которым кто-то может или не может выбрать конкретный маршрут для вождения, ходьбы или велосипеда. Пешеходы, которые считают перекресток небезопасным, могут переходить его в районе среднего квартала, где им легче найти брешь в движении. Автомобилистам может быть неудобно делать левый поворот через несколько полос движения, поэтому они могут выбрать поворот направо и съехать со своего пути, чтобы вместо этого выполнить разворот. Восприятие безопасности влияет на решения участников дорожного движения, но его нелегко понять, глядя на данные о ДТП.Специалисты по безопасности могут использовать опросы, симуляторы вождения и другие современные технологии, чтобы понять восприятие безопасности участниками дорожного движения.
Оценка безопасности конкретной сети, коридора или перекрестка требует понимания как номинальной, так и основной безопасности. Эти термины, впервые введенные доктором Эзрой Хауэром, 3 , представляют собой полезную основу для оценки безопасности конкретного места. Десятилетия исследований и оценок в области безопасности дорожного движения выявили обширные знания о надлежащих проектах и политике, которые способствуют безопасности в конкретном месте.Дороги, построенные в соответствии с лучшими и последними рекомендованными стандартами исследований и проектирования, считаются номинально безопасными. Номинальная безопасность — это абсолютное заявление о безопасности объекта, основанное только на его соответствии определенному набору стандартов проектирования и связанных с ними критериев. Дорога, которая была номинально безопасной, когда она была впервые открыта для движения, может стать номинально небезопасной при изменении стандартов проектирования проезжей части, даже если характеристики дороги при столкновении не изменились.
Хотя номинальная безопасность учитывает конструкцию дороги, она не включает никакой информации о частоте, типе и серьезности аварий, происходящих на объекте.Историческая и долгосрочная объективная безопасность места, основанная на данных о ДТП, называется основной безопасностью. Конкретный перекресток, на котором за длительный период произошло меньше аварий, чем ожидалось, будет называться по существу безопасным местом, в то время как коридор с большим, чем ожидалось, количеством аварий по существу небезопасен. В отличие от номинальной безопасности, основная безопасность действует непрерывно и допускает ряд объяснений того, почему существует конкретная проблема безопасности.
Еще одним ключевым отличием является тот факт, что место может быть номинально безопасным — при соблюдении всех стандартов и критериев проектирования — при высоком уровне аварий, что делает его по существу небезопасным. Точно так же относительно безопасное место (то есть с более низким, чем ожидалось, уровнем аварийности) может быть номинально небезопасным, если оно не соответствует применимым стандартам проектирования.
Агентства и специалисты по безопасности должны стремиться уделять приоритетное внимание основной безопасности объекта. Простое строительство дороги, отвечающей всем текущим стандартам проектирования, не гарантирует, что дорога будет по существу безопасной.Использование профессионального суждения для определения приоритетов повышения безопасности и выбора подходящих конструкций из ряда вариантов на основе наблюдений за поведением участников дорожного движения и других доступных данных повысит вероятность того, что все факторы будут учтены. Конечным результатом станет дорога, которая на шаг приблизится к конечной цели создания транспортной системы, свободной от травм и смертей.
Решения и компромиссы по безопасности дорожного движения
Цель повышения безопасности существует наряду с другими целями транспортной системы, такими как мобильность, эффективное перемещение людей и товаров, экологические проблемы, общественное здоровье и экономические цели.Таким образом, специалисты по транспорту и политики часто обращаются к компромиссам, принимая решение отдать предпочтение одной цели за счет другой. В то время как специалисты в области безопасности дорожного движения постоянно ищут новые конструкции и технологии для достижения всех целей, по-прежнему существует множество случаев, когда государственные учреждения должны взвесить конкурирующие цели в отношении местоположения или части дорожной сети и решить, какие компромиссы следует предпринять. сделано с целью повышения безопасности дорожного движения.
Ниже приведены несколько примеров:
- Круговые перекрестки: Город может принять решение об установке кругового перекрестка на перекрестке, чтобы уменьшить потенциальные конфликты между различными движениями на перекрестке.Повышена безопасность, особенно при поворотах влево, поскольку теперь все повороты являются частью круга. Однако для движения по кольцевой развязке необходимо, чтобы движение на главной дороге замедлило скорость и проехало по кольцевой развязке. Во время интенсивного движения, особенно при разбалансировке между участками перекрестка, это может привести к снижению общей пропускной способности перекрестка. Однако это компромисс, позволяющий производить меньше сбоев.
- Велосипедный шлем Требования: В целях повышения безопасности велосипедистов в некоторых юрисдикциях приняты постановления, требующие от велосипедистов носить шлемы.На практике это может снизить риск травм головы у велосипедистов, но также может уменьшить количество людей, предпочитающих ездить на велосипеде. Принятие таких постановлений поставило бы во главу угла безопасность и потенциально снизило бы количество велосипедистов.
- Камеры красного света: Камеры красного света следят за сигнальными перекрестками и записывают информацию о тех, кто нарушает законы красных фонарей, что обычно приводит к цитированию по почте. Было показано, что эти камеры повышают безопасность, уменьшая количество аварий, приводящих к серьезным травмам, 4 , но установка камер может быть встречена значительным сопротивлением общественности.
- Защищенные левые повороты: Чтобы свести к минимуму риск серьезных ДТП при левом повороте на сигнальных перекрестках, инженеры могут выбрать для водителей левого поворота эксклюзивную защищенную фазу левого поворота (зеленая стрелка). Хотя это сводит к минимуму риск столкновения за счет отделения транспортных средств с левым поворотом от других движущихся объектов, это также требует, чтобы дополнительное время было добавлено специально для левых поворотов, что может увеличить задержку для остальной части движения на перекрестке.
- Rumble Strips: В сельской местности можно установить защитные полосы в качестве меры предупреждения водителей, когда они сбегают с дороги.Однако эти полосы обычно устанавливаются на краю дороги или обочине с твердым покрытием, где велосипедисты могут безопасно и комфортно ездить вдали от движения. Это может привести к тому, что велосипедисты будут ехать по дороге, где они более уязвимы для столкновений с автотранспортными средствами.
- Деревья и ландшафтный дизайн: Уличные деревья, кустарники и другая растительность могут служить ценным целям в придорожных условиях — в частности, создавать тень для тротуаров, служить буфером между дорогой и тротуаром и даже создавать «визуальное трение», которое может снизить скорость автомобиля.Однако деревья также могут представлять угрозу безопасности для транспортных средств, которые съезжают с дороги и сталкиваются с ними. Растительность, расположенная слишком близко к перекрестку, может ограничить расстояние обзора, что приведет к авариям. Удаление отдельных деревьев и растительности — отличный пример компромисса между безопасностью и другими полезными свойствами деревьев.
- Дорожная установка: Высокоскоростная дорога с большим объёмом движения и множеством полос движения может отделять жилые дома от начальной школы.Чтобы дети, проживающие в жилом комплексе, могли безопасно добираться в школу и из школы, вдоль оживленной дороги могут быть установлены светофоры и пешеходный переход. Автомобилисты будут задержаны, так как они должны будут остановиться на некоторое время, пока студенты переходят дорогу, но для этих студентов переход безопаснее.
- Управление доступом: Повороты влево и обратно в торговые центры, особенно вдоль многополосных дорог, могут привести к серьезным травмам автомобилистов при авариях.Устранение этих левых поворотов за счет создания приподнятых срединных островов и объединения проездов может устранить эти рискованные движения; однако это предотвращает прямой доступ к магазинам потенциальных покупателей.
Иногда повышение безопасности одной группы участников дорожного движения может отрицательно сказаться на безопасности другой группы. Также может случиться так, что повышение мобильности для группы участников дорожного движения может отрицательно сказаться на безопасности этой же группы. На многие из этих компромиссов нет абсолютно правильного ответа, поскольку все они зависят от контекста.Транспортным специалистам необходимо обсудить различные компромиссы в контексте транспортных целей конкретного сообщества. Такие компромиссы совершаются каждый день и требуют сотрудничества многочисленных агентств и заинтересованных сторон, каждый из которых должен играть определенную роль в принятии решений о транспортировке. Несмотря на соблазн изучить безопасность дорожного движения как автономную систему, существует множество факторов, влияющих на безопасность дорожного движения и поведение во время поездок. Чтобы принимать обоснованные решения о транспортной системе, специалисты по транспортировке должны понимать влияние — как положительное, так и отрицательное — которое проектные, производственные и политические решения оказывают на безопасность транспортной сети, а также влияние на другие области, такие как общественное здоровье, мобильность, качество окружающей среды и экономический рост.
УПРАЖНЕНИЯ
- СПИСОК различных способов измерения безопасности дороги и описание преимуществ и недостатков каждого из них. Учитывайте такие факторы, как тип информации, которую предоставляет каждая мера безопасности, а также другие вопросы, например, как ее можно собирать.
- ОПИСАТЬ изменение дороги или перекрестка, которое может улучшить одну транспортную цель (например, дорожное движение, общественное здравоохранение, мобильность и доступ, качество окружающей среды или экономический рост) за счет безопасности участников дорожного движения.
- ОПИСАТЬ изменение дороги или перекрестка, которое может повысить безопасность дорожного движения за счет другой транспортной цели (например, транспортных операций, общественного здравоохранения, мобильности и доступа, качества окружающей среды или экономического роста).
- ОПИСАТЬ изменение дороги или перекрестка, которое может повысить безопасность участников дорожного движения, но не за счет других пользователей или других целей.
К началу
Глава 2 — Безопасность дорожного движения в течение многих лет
При рассмотрении текущих усилий по обеспечению безопасности дорожного движения полезно рассматривать их в контексте истории американского транспорта.В последние десятилетия мы стали свидетелями многочисленных достижений в области безопасности дорожного движения. Это растущее национальное осознание необходимости более безопасных дорог резко контрастирует с первой половиной двадцатого века, когда основное внимание уделялось расширению автомобильных дорог. В следующей главе будет представлен обзор основных этапов и достижений, которые привели к созданию транспортной системы, которая у нас есть сегодня, а также политики и практики, которые были реализованы для решения растущей проблемы безопасности.
Трое мужчин с велосипедами на мосту возле Пирс Милл, Вашингтон, округ Колумбия.C., 1885.
(Источник: Коллекция Брэди-Хэнди, Библиотека Конгресса США)
Последствия превышения скорости
Как и в наше время, на заре автомобилей установленные ограничения скорости были намного ниже скорости, на которую способны большинство автомобилей.
С более быстрым и интенсивным движением стало опасно ездить по середине дороги, и в Штатах начали рисовать осевые линии на тротуарах, чтобы направить движение по полосам. На скорости 40 миль в час эти полосы казались большинству автомобилистов неудобно узкими, особенно при проезде грузовиков.Линии полосы движения также заставляли грузовики приближаться к обочине, в результате чего кромки плиты и углы дороги ломались. Чтобы обеспечить большую безопасность и уменьшить повреждение кромок, дорожные департаменты штата построили более широкие тротуары и сделали новые дороги более прямыми.
Эти усовершенствования наряду с усовершенствованиями в области механики транспортных средств, такими как более мощные двигатели и четырехколесные тормоза, в свою очередь, способствовали еще более высокой скорости.
Таким образом, после 1918 года проектирование шоссе следовало по спирали причинно-следственной связи, что привело к увеличению скорости и увеличению тротуаров.Движущей силой этой спирали были предпочтения скорости движения огромной массы операторов транспортных средств. Государственные органы никогда не могли вводить или обеспечивать соблюдение ограничений скорости в течение длительного времени, если большинство водителей считали эти ограничения необоснованно низкими. В настоящее время многие современные инженерные практики используют процентную скорость 85 -го — или скорость, с которой движется большинство водителей — в качестве метода установки ограничений скорости.
Министр торговли Герберт Гувер (в центре) с президентом Калвином Кулиджем (справа) в феврале 1924 года.
(Источник: Коллекция Харриса и Юинга, Библиотека Конгресса США)
Сбалансированная конструкция для безопасности
В 1920-х и 1930-х годах хорошей инженерной практикой было проектировать новые автомагистрали как можно чаще по длинным прямым линиям или «касательным». Когда возникла необходимость изменить направление, инженер построил круговую кривую, радиус которой он выбрал так, чтобы соответствовать земле с наименьшими затратами на строительство, но который не мог быть меньше определенного минимума, установленного политикой отдела.На практике инженеры сделали кривые более резкими, чем этот минимум, когда это было дешевле, но с небольшой последовательностью. Инженеры ожидали, что автомобилисты, ездящие по этим дорогам, будут регулировать свою скорость в соответствии с переменным радиусом, а на более крутых поворотах безопасная расчетная скорость может быть значительно ниже, чем объявленный предел скорости.
Растущее беспокойство по поводу безопасности дорожного движения заставило многих дорожных инженеров беспокоиться о несоответствии между указанными ограничениями скорости и безопасной расчетной скоростью на поворотах. В 1935 году дорожный инженер Джозеф Барнетт из BPR предложил, чтобы все новые сельские дороги соответствовали «предполагаемой расчетной скорости», комфортной максимальной скорости для водителей за пределами городских районов.
С принятием Американской ассоциацией государственных служащих автомобильных дорог в 1938 году концепции «сбалансированного дизайна» Барнетта стала неотъемлемой частью дизайна проезжей части в США. Сегодня стандарты для проектирования кривых, таких как расчетная скорость, радиус кривой и вираж (наклон дороги через кривую), предусмотрены в Политике геометрического проектирования шоссе и улиц, разработанной Американской ассоциацией государственных служащих автомобильного транспорта.
Знаки безопасности
Перед Первой мировой войной большинство государств использовали знаки для предупреждения участников дорожного движения об опасности впереди, особенно на железнодорожных переездах; Сами железнодорожные компании были обязаны вывешивать предупреждающие знаки на всех пересечениях дорог общего пользования.Однако между государствами не было согласия относительно конкретной конструкции этих предупреждающих устройств, и знаки были разных форм, размеров и цветов.
В 1929 году Американский инженерный совет изучил методы использования вывесок во всех городах США с населением более 50 000 человек и создал документ, который, по сути, был руководством по передовой практике того времени. Признавая необходимость стандартной практики для знаков в сельских и городских районах, Американская ассоциация государственных служащих автомобильных дорог и Национальная конференция по уличной и дорожной безопасности организовали Объединенный комитет по унифицированным устройствам управления движением в 1931 году и представили новое руководство для использования на национальном уровне в 1935 г.Руководство по передовой практике со временем изменилось и стало Руководством по унифицированным устройствам управления движением.
Конец девятнадцатого века и популярность велосипедного спорта
Изучение истории безопасности дорожного движения в США может начаться с самых разных точек — некоторые из наших дорог были разработаны как доколониальные маршруты, а другие были проложены коренными американцами. Однако с точки зрения долговременного влияния на современную транспортную сеть наиболее полезно начать обсуждение с конца девятнадцатого века.
В 1880-х и 1890-х годах велосипеды были доминирующим средством передвижения на дорогах нашей страны. С появлением в конце 1880-х годов «безопасного» велосипеда с двумя колесами одинакового размера и пневматической шины увлечение велосипедным спортом стало экономической, политической и социальной силой в США. К 1890 году США производили больше более 1 миллиона велосипедов каждый год.
В то время поведение велосипедистов — особенно неосторожное или рискованное поведение — способствовало возникновению велосипедных аварий.Однако наибольшая причина аварий произошла за пределами городов; Плохое состояние национальных дорог сделало езду на велосипеде трудоемким и опасным процессом. Велосипедные группы работали на федеральном уровне, уровне штата и на местном уровне, чтобы обеспечить соблюдение законодательства по улучшению дорог. Работа этих правозащитных групп стала известна как «Движение хороших дорог».
Чтобы заручиться поддержкой, правозащитники адаптировали свое послание к фермерам, аргументируя это тем, что плохие дороги из-за увеличения транспортных расходов обходятся дороже, чем хорошие дороги.В то время как инженеры, писатели и политики присоединились к движению, велосипедисты доминировали в Движении хороших дорог, пока в начале двадцатого века не появились автомобили. 5
К концу столетия автомобили постепенно начали делить дорогу с велосипедистами и пешеходами, извлекая выгоду из многих усилий по улучшению дороги, инициированных группами велосипедистов. В 1899 году автомобиль сбил пешехода в Нью-Йорке и убил его. Это событие стало первым случаем в США, когда человек погиб в результате аварии с участием автомобиля. 6
Рост автомобилей в начале двадцатого века
В 1905 году только 78000 автомобилей, большинство из которых были пригнаны к городам, путешествовали по США. Десять лет спустя по дорогам страны ехало 2,33 миллиона автомобилей, а к 1918 году это число увеличилось до 5,55 миллиона. Массовое производство сделало это возможным, поскольку снизило затраты на производство автомобилей, сделав автомобили доступными для среднего класса. По мере того, как больше автомобилей становилось доступным по более низкой цене, модель ежедневных поездок в США.С. начал смещаться. Более длинные поездки на автомобиле заменили более короткие поездки пешком или на велосипеде, и модели развития начали следовать этому примеру. Наступила автомобильная эра, и вместе с ней разовьется новый вид автомагистралей, специально предназначенный для автомобилей.
Расширение использования автомобилей немедленно положительно повлияло на национальную экономику и качество жизни по всей стране. Однако распространение автомобилей имело и отрицательную сторону. Когда миллионы новых водителей вышли на дороги, количество дорожно-транспортных происшествий быстро увеличилось — с 10 723 в 1918 году до 31 215 в 1929 году. 7
Внимание к безопасности
Признавая рост количества аварий и связанных с ними травм и смертельных случаев, министр торговли Герберт Гувер созвал Первую национальную конференцию по безопасности улиц и шоссе в Вашингтоне, округ Колумбия, в декабре 1924 года. комиссии, правоохранительные органы, страховые компании, автомобильные ассоциации и множество других заинтересованных сторон и заинтересованных групп собрались в одном месте, чтобы обсудить, как бороться с растущим числом смертельных случаев и серьезных травм.
Перед конференцией были созданы комитеты для проведения исследований в таких областях, как планирование и зонирование, управление движением, автомобили, статистика и другие области, связанные с безопасностью дорожного движения. Эти комитеты сообщили о существенных различиях в правилах дорожного движения от штата к штату и от города к городу. Например, двадцать государств не пытались собирать статистику ДТП, только восемь государств требовали сообщать о ДТП, повлекших за собой травмы, и 38 требовали, чтобы железные дороги и обычные перевозчики сообщали о дорожно-транспортных происшествиях.Другие комитеты уделили свое внимание таким вопросам, как управление движением и скорость транспортных средств, проблемы инфраструктуры и технического обслуживания, а также проблемы, влияющие на транспортные средства и их водителей.
Участники конференции поддержали широкий спектр мер по снижению аварийности и рекомендовали законодательным, административным, техническим и образовательным органам принять их. Участники конференции также рекомендовали штатам взять на себя инициативу, приняв соответствующие законы об автомобилях и создав соответствующие агентства для исполнения законов, охраны дорог, регистрации транспортных средств и лицензирования водителей.
Федеральному правительству конференция возложила роль поощрения, сбора и распространения информации, а также разработки рекомендуемых практик. Принятие и внедрение этих рекомендуемых практик будет оставлено на усмотрение отдельных государств.
Секретарь Гувер созвал вторую конференцию на март 1926 года. В промежутке между двумя конференциями специальный комитет разработал типовой «Единый кодекс для транспортных средств», охватывающий регистрацию и оформление прав на транспортные средства, лицензирование водителей и эксплуатацию транспортных средств на автомагистралях.Кодекс вобрал в себя лучшие черты многочисленных и разнообразных законов штатов, которые тогда находились в статутах. Вторая конференция одобрила этот кодекс и рекомендовала его законодательным органам штата в качестве основы для единого автомобильного законодательства.
Президент Гарри С. Трумэн, 1945 г.
(Источник: Библиотека Конгресса США)
Исследования, проведенные после конференции 1926 года, пришли к выводу, что определить причины аварий было гораздо труднее, чем они предполагали.Проблема требовала постоянной программы исследований национальной организацией. Конференция согласилась, и Совет по исследованиям автомобильных дорог (HRB) организовал Комитет по причинам и предотвращению дорожно-транспортных происшествий для координации исследований аварий по всей стране. HRB сыграл важную роль в последующих усилиях по уменьшению последствий аварий. 8
Роль федерального правительства в развитии автомобильных дорог
Растущее использование автотранспортных средств в 1920-е годы отражалось расширением роли федерального правительства в финансировании и строительстве дорог.Изначально Управление дорог общего пользования было организовано Министерством сельского хозяйства США и играло большую роль в финансировании дорог в национальных парках и лесах.
В соответствии с Законом о федеральных дорогах 1916 года, этот офис станет Бюро дорог общего пользования (BPR), которому будет поручено работать совместно с государственными департаментами автомобильных дорог над дорожными проектами. Продолжались работы по расширению автомобильных дорог по всей стране, и в период с 1921 по 1939 год протяженность дорог с твердым покрытием увеличилась с 387 000 миль до почти 1.4 миллиона миль. 9 BPR признал, что устаревшая система автомагистралей была одной из причин большого количества ДТП, но не зашла так далеко, чтобы выявить основные причины ДТП или рекомендовать возможные решения.
За это время упор был сделан на усиление роли федерального правительства в процессе проектирования и развития автомагистралей. Эти усилия достигли высшей точки в 1944 году, когда Конгресс одобрил разработку Национальной системы автомагистралей между штатами вместе с Законом о федеральной автостраде того года.Несмотря на обширный охват, предусматривающий создание сети в 40 000 миль, закон не сопровождался какими-либо средствами для поддержки развития этих автомагистралей. Без финансирования законодательство не привело к значительному расширению сети автомобильных дорог.
Президент Дуайт Д. Эйзенхауэр выступает на конференции Белого дома по безопасности дорожного движения, 1954 г.
(Источник: Президентская библиотека Эйзенхауэра)
Президент Линдон Б. Джонсон подписывает Закон о национальной безопасности дорожного движения и транспортных средств 1966 года и Закон о безопасности дорожного движения 1966 года.
(Источник: Президентская библиотека LBJ)
Безопасность дорожного движения по-прежнему является национальной проблемой. В мае 1946 года президент Гарри С. Трумэн выступил на конференции по безопасности дорожного движения, чтобы заручиться поддержкой общественности для улучшения государственных законов об автомобилях, лицензирования водителей и образования. Подводя итоги своих безуспешных усилий в качестве сенатора США по введению в действие федерального законодательства о регистрации автотранспортных средств и выдаче водительских прав, президент заявил, что Конгресс еще не готов вмешиваться в то, что многие считают прерогативой штата.Однако он отметил, что федеральное правительство не останется в стороне, если уровень смертности на дорогах продолжит расти. 10
Развитие и рост после войны
Экономические условия после Второй мировой войны привели к еще более высокому уровню вождения и владения автомобилями. Личные сбережения в размере почти 44 миллиардов долларов создали рынок жилья и других товаров, главным из которых являются новые автомобили. Производство автомобилей подскочило с почти 70 000 в 1945 году до 3,9 миллиона в 1948 году.
Из-за этого увеличения производства транспортных средств резко выросло количество регистраций транспортных средств, и количество водителей на дорогах и автомагистралях страны достигло беспрецедентного уровня. В условиях военного нормирования резины и, в частности, шин, государства ввели контроль скорости, чтобы уменьшить износ и продлить срок службы шин. С прекращением нормирования и экстренного контроля скорости по завершении войны, движение по шоссе вернулось к довоенному уровню и начало неуклонно расти примерно на 6 процентов в год, что будет продолжаться почти три десятилетия.
В то время как растущая популярность застройки с низкой плотностью застройки (например, пригородов) и доступность автомобилей создали идеальные условия для более активного вождения, национальные дороги и автомагистрали были не готовы к увеличению трафика. В условиях ограничений военного времени государства не могли надлежащим образом содержать свои автомагистрали. В связи с повсеместной эксплуатацией перегруженных грузовиков и сокращением затрат на техническое обслуживание системы автомобильных дорог штата в послевоенное время были в худшем структурном состоянии, чем до войны.
Развитие системы автомагистралей между штатами
Хотя Национальная система автомагистралей между штатами была учреждена законодательством в 1944 году, за следующее десятилетие не было достигнуто большого прогресса. Без финансирования установленные маршруты развивались медленно. Ситуация изменилась в 1956 году, когда президент Дуайт Д. Эйзенхауэр подписал Закон о федеральной автостраде 1956 года. Этот закон увязал развитие системы межгосударственных автомагистралей с интересами национальной обороны и выделил финансирование для быстрого расширения сети автомагистралей. 11 Закон установил специальный поток финансирования и план развития автомагистралей, которые открыли для страны беспрецедентную эру расширения, когда новые межгосударственные коридоры связывали города друг с другом.
Несмотря на энтузиазм политических и деловых лидеров, развитие этой системы не обошлось без критиков. Эти критики в первую очередь осуждали разрушение домов и разделение сообществ, которое иногда происходило из-за того, что новые автомагистрали пересекали старые кварталы.Хотя это противодействие остановило проекты в некоторых местах, это не остановило расширение системы автомагистралей между штатами.
Закон о безопасности дорожного движения 1966 года
В 1964 году в США резко возросло количество погибших в дорожно-транспортных происшествиях. Увеличение количества транспортных средств на дорогах в сочетании с общественной культурой, которая не ставила во главу угла сознание безопасности дорожного движения, привело к 47 700 смертельным случаям на автомагистралях страны, что на 10 процентов больше, чем число погибших в 1963 году.Эти смерти побудили страну пристально взглянуть на усилия по обеспечению безопасности дорожного движения и привели к слушаниям в Конгрессе в марте 1965 года, чтобы привлечь внимание общественности к растущему национальному кризису. 12
Чтобы отреагировать на эти тенденции, стране потребовалось изменить направление проектирования и эксплуатации дорог и транспортных средств. Это изменение началось с пересмотра стандартов безопасности в этих областях и проведения исследований для определения эффективных мер по повышению безопасности. 1960-е годы были поворотным десятилетием для безопасности дорожного движения из-за принятия законов, которые предусматривали финансирование и новую политику.9 сентября 1966 года президент Линдон Б. Джонсон подписал Закон о национальной безопасности дорожного движения и транспортных средств 1966 года и Закон о безопасности дорожного движения 1966 года. Церемония подписания в Розовом саду Белого дома ознаменовала преобразование роли федеральных властей. Правительство в области безопасности дорожного движения. Эта роль росла во время правления Эйзенхауэра, но стала более предметной, поскольку число погибших на национальных автомагистралях возросло до 50 000. Представители федерального правительства отметили, что шаги, предпринятые в течение предыдущих двух десятилетий для обращения вспять растущего числа смертельных случаев, потерпели неудачу, и они полагали, что безопасность дорожного движения больше не должна полностью зависеть от ответственности штатов, автомобильной промышленности и индивидуальные водители. 13
В соответствии с этим законом было учреждено Министерство транспорта США (USDOT) и Бюро автомобильных дорог общего пользования было преобразовано в Федеральное управление автомобильных дорог (FHWA). Были добавлены новые бюро для решения вопросов безопасности в областях, вызывающих растущую озабоченность, таких как Бюро безопасности автотранспортных средств и Национальное бюро безопасности дорожного движения (позже они станут Федеральным управлением безопасности автотранспортных средств и Национальным управлением безопасности дорожного движения соответственно). USDOT приступил к разработке программ и инициатив и подготовил почву для деятельности, которая продолжается и сегодня. 14
Достижения в области дизайна транспортных средств и политики также были в центре внимания в 1960-х годах. В 1968 году федеральное законодательство требовало, чтобы на транспортных средствах были ремни безопасности. 15 Федеральный закон также требует, чтобы государства начали применять законы о мотоциклетных шлемах, чтобы претендовать на определенные источники финансирования. 16 Эти требования привели к более широкому внедрению политики безопасности в конце 1960-х и 1970-х годах. Раздел 402 Закона о безопасности дорожного движения устанавливает поток доходов для финансирования прямой поддержки государственных программ, направленных на повышение безопасности дорожного движения.Эти фонды, известные как Программа субсидий для обеспечения безопасности дорожного движения штата и общины, первоначально поддерживали множество программных областей, включая множество программ поведенческой безопасности, которые существуют до сих пор. 17
Энергетические кризисы и законодательство о безопасности в 1970-х и 1980-х годах
1970-е и 1980-е годы характеризовались энергетическими кризисами 1973 и 1979 годов, которые немедленно и надолго повлияли на тенденции в сфере путешествий. Количество пройденных миль транспортных средств (VMT) уменьшалось после каждого из этих событий, поскольку американцы ездили меньше из-за роста цен на топливо.Стратегические законодательные меры Конгресса, такие как Национальный закон о максимальной скорости 1974 года, запрещающий скорости выше 55 миль в час, также помогли снизить расходы на топливо. Позже в 1995 году закон будет отменен, что позволит штатам устанавливать свои собственные ограничения максимальной скорости.
Между 1970 и 2007 годами было два периода времени, когда VMT уменьшалась по сравнению с предыдущим годом. Эти годы включают 1974 и 1979, в каждом из которых VMT уменьшилась примерно на 18 миллиардов миль по сравнению с предыдущим годом. 18 По мере того, как снижалось вождение, уменьшались и дорожно-транспортные происшествия. Например, с 1973 по 1974 год количество погибших в дорожно-транспортных происшествиях снизилось на 16 процентов — это самый большой спад за год с 1941-1942 годов. 19 Уровень движения снова начал расти после нормализации затрат на топливо, поэтому снижение продолжалось только после периода экономической стагнации.
Закон о безопасности дорожного движения 1973 года установил особую методологию повышения безопасности дорожного движения с инженерной точки зрения. Требовалось, чтобы государства сначала обследовали все опасные места и изучили причины аварий на этих объектах.Затем был проведен анализ выгод / затрат для определения приоритетности необходимых улучшений. Этот процесс заложил основу для текущих процессов управления безопасностью и с годами будет совершенствоваться и улучшаться.
Офицеры используют специальные приборы для измерения содержания алкоголя в крови водителей.
Закон о безопасности дорожного движения 1973 года также прояснил отношения между федеральным правительством и штатами. Федеральное правительство должно было руководить политикой и компонентами программ, а штаты несли ответственность за реализацию этих политик и программ. 20
В 1970-е годы Конгресс также учредил Программу содействия безопасности автотранспортных средств (MCSAP). Эта программа предоставляет государствам финансовую помощь для снижения количества и серьезности аварий и происшествий с опасными материалами, связанных с коммерческими автотранспортными средствами (CMV), посредством программ инспекции и обеспечения соблюдения правил, ориентированных на грузовые автомобили, перевозчики и правила для водителей. 21
Безопасность транспортных средств продолжала оставаться приоритетом в 1970-х и 1980-х годах, поскольку все больше государств начали вводить законы, требующие использования ремней безопасности и мотоциклетных шлемов.Нью-Йорк стал первым штатом, принявшим закон об обязательных ремнях безопасности в 1984 году, и другие штаты вскоре последовали его примеру. 22 Федеральный стандарт безопасности автотранспортных средств 213 привлек внимание к безопасности детей-пассажиров. Этот стандарт был первым, в котором были изложены особые требования к удерживающим системам, разработанным для детей.
Мультимодальная смена в 1990-е годы
В 1990-е годы произошел сдвиг от транспортной политики, ориентированной на безопасность и эффективность автотранспортных средств, к признанию альтернативных видов транспорта, таких как езда на велосипеде, ходьба пешком и использование общественного транспорта.Закон 1991 года об эффективности интермодальных наземных перевозок (ISTEA) добавил мультимодальные перспективы к программе федеральной помощи по автомагистралям.
Хотя АЭСТ не уделял особого внимания безопасности перевозок, он разработал несколько программ по продвижению более безопасных путешествий. Например, АЭСТ повысил безопасность дорожного движения с помощью новых программ, поощряющих использование ремней безопасности и мотоциклетных шлемов. 23 Закон также требует установки подушек безопасности для водителей и передних пассажиров во всех легковых и грузовых автомобилях. 24
В 1998 году Закон о транспортном равенстве для 21 века (TEA-21) уделил больше внимания планированию безопасности дорожного движения, установив безопасность и защищенность в качестве приоритетов планирования. До TEA-21 организация планирования штата или города (MPO) могла включать безопасность в свои цели или план дальних перевозок, но конкретные стратегии повышения безопасности редко включались в процессы или документы планирования на уровне штата и города.
TEA-21 учредила программу инфраструктуры безопасности дорожного движения (не путать с Программой повышения безопасности дорожного движения, которая будет разработана несколько лет спустя), которая профинансировала проекты повышения безопасности для устранения проблем с безопасностью.
Законодательство TEA-21 также поощряло государства принимать и реализовывать эффективные программы по повышению качества (например, своевременности, точности, полноты, единообразия и доступности) государственных данных, необходимых для определения приоритетов безопасности для национальных, государственных и местных программ безопасности дорожного движения. 25
Не следует упускать из виду закон о TEA-21, еще один поворотный момент в транспортном законодательстве произошел в 2000 году, когда важное положение, касающееся алкоголя, было включено в закон о присвоении средств USDOT.Это ассигнование содержало требование о том, что все штаты должны принять законы, ограничивающие допустимое содержание алкоголя в крови (BAC) водителей до 0,08 процента. 26 Этот предел соответствовал аналогичным ограничениям, налагаемым на водителей в других странах, хотя некоторые европейские страны ограничивают легальный BAC до 0,05 процента.
В то время как 19 штатов и Вашингтон, округ Колумбия, уже приняли этот закон, федеральный мандат стал дополнительным стимулом для других штатов сделать это: штаты, которые не приняли закон к 2004 году, откажутся от части своего финансирования транспортировки.Хотя конкретные законы различаются, каждый штат теперь признает установленный законом предел содержания алкоголя в крови 0,08 процента. 27
Законодательство 21 века
Законодательство XXI века продолжало двигать федеральное финансирование и политику в области транспорта в сторону сосредоточения внимания на мультимодальных, основанных на данных подходах к совершенствованию транспортной системы. Одной из конкретных областей внимания было движение к планированию безопасности. Планирование безопасности перевозок смещает акцент традиционных усилий по планированию на более комплексный процесс, который интегрирует безопасность в процесс принятия решений при транспортировке.Планирование безопасности охватывает коридоры и целые транспортные сети на местном, региональном и государственном уровнях, а также на отдельных участках. 28
В 2005 году Конгресс принял Закон о безопасном, подотчетном, гибком и эффективном транспортном капитале — наследие для пользователей (SAFETEA-LU). SAFETEA-LU повысила престиж федеральных программ безопасности дорожного движения, учредив Программу повышения безопасности дорожного движения (HSIP) в качестве основной программы федеральной помощи, связанной со стратегическим планированием и эффективностью обеспечения безопасности.HSIP — одна из шести основных программ федеральной помощи, в рамках которых средства распределяются напрямую между штатами. Одним из основных элементов HSIP было требование к каждому государству разработать и внедрить Стратегический план безопасности дорожного движения (SHSP). 29 Планы были направлены на создание основанных на данных подходов, которые были скоординированы с широким кругом заинтересованных сторон и использовали различные дисциплины (например, инженерное дело, правоприменение, образование и реагирование на чрезвычайные ситуации). Эти планы, основанные на данных, должны были включать четкие методы измерения прогресса в достижении целей безопасности.
Закон о прогрессе в 21 веке (MAP-21) был подписан в 2012 году. Закон 2012 года изменил политику и программную основу для инвестиций в транспортную инфраструктуру страны, расширив программы и политику, принятые в 1991 году.
MAP-21 удвоил финансирование проектов по повышению безопасности дорожного движения, укрепил связь между программами безопасности движения и создал позитивную повестку дня для достижения значительного прогресса в снижении смертности на дорогах и серьезных травм.Он уделил повышенное внимание важности высококачественных данных, транспортной инфраструктуры и безопасности местных улиц.
Заключение
Изучение истории тенденций в сфере путешествий и безопасности в США помогает проиллюстрировать, как прошлые решения привели к появлению транспортной системы, наблюдаемой сегодня. Безопасность не всегда была решающим фактором при строительстве дорог. Однако сегодня безопасность является главным приоритетом USDOT. 30 Большинство государственных и местных транспортных агентств разделяют цель USDOT; некоторые даже поставили перед собой цель свести к нулю общее количество погибших в результате дорожно-транспортных происшествий.Эти цели «нулевого видения» и «к нулевому уровню смертности» направляют транспортные проекты, требуя, чтобы безопасность включалась на каждом этапе планирования, проектирования, строительства и эксплуатации проекта.
В будущем обязательно возникнут проблемы безопасности, поскольку технологические достижения приведут к изменениям в автопарке. Автономные и потенциально беспилотные автомобили разрабатываются и тестируются по всему миру. Хотя повышение безопасности рекламируется как преимущество этих передовых транспортных средств, безопасность по-прежнему будет оставаться приоритетом, поскольку они начинают разделять дороги со старыми автомобилями, велосипедистами и пешеходами.Как можно понять из истории безопасности дорожного движения в США, сложные проблемы необходимо решать с помощью улучшений в области безопасности, законодательных действий и сотрудничества.
УПРАЖНЕНИЯ
- ИССЛЕДУЙТЕ федеральный транспортный закон, рассматриваемый в этой главе, и напишите краткое изложение закона, подчеркнув аспекты безопасности.
- НАЙДИТЕ недавнюю новостную статью, касающуюся безопасности дорожного движения (больше, чем просто статью в местных новостях о недавней аварии), и напишите краткое изложение усилий, предпринятых государственным агентством, как она была воспринята общественностью и была ли она показана быть эффективным в повышении безопасности дорожного движения.
- Используйте https://www.govtrack.us, чтобы найти законопроект о транспорте, который в настоящее время предлагается или рассматривается Конгрессом. Опишите, как законодательство может повлиять на безопасность дорожного движения.
- ИССЛЕДУЙТЕ легальное определение содержания алкоголя в крови (BAC) по штатам США и создайте таблицу, показывающую сравнение. Выберите один штат, в котором законный BAC ниже федерального требования, найдите газету или новостную статью, описывающую, как был определен этот уровень BAC, и напишите резюме.
К началу
Глава 3 — Междисциплинарные подходы
Безопасность дорожного движения — сложный вопрос, и любые усилия по повышению безопасности должны касаться не только проезжей части, но и поведения участников дорожного движения, конструкции транспортных средств, взаимодействия между участниками дорожного движения и воздействия проезжей части на всех участников дорожного движения. В число партнеров по безопасности дорожного движения входят все, кто влияет на безопасность участников дорожного движения, в том числе в области безопасности инфраструктуры, поведенческой безопасности дорожного движения, планирования перевозок, общественного здравоохранения, общественной безопасности и многих других дисциплин.Каждая из этих дисциплин может предложить уникальную перспективу, и у каждой есть свои методы обеспечения безопасности дорожного движения. Все чаще эти различные дисциплины работают в сотрудничестве друг с другом для решения проблем безопасности дорожного движения с помощью всеобъемлющих программ. Вместо того чтобы сосредотачиваться на традиционных «разрозненных» действиях, агентства надеются, что это взаимодействие и сотрудничество между различными дисциплинами приведет к постоянному повышению безопасности.
The E’s
Популярный междисциплинарный подход к безопасности дорожного движения иногда называют «четырьмя Е»; Инженерное дело, образование, правоприменение и реагирование на чрезвычайные ситуации.Эти Е широко представляют различные дисциплины, которые объединяют заинтересованные стороны, которые заботятся о безопасности дороги для всех пользователей. Иногда к этому списку добавляют пятую букву «E» для оценки, чтобы обозначить важную роль оценки того, что работает, а что нет. Это подчеркивает тот факт, что достоверные данные имеют решающее значение для повышения безопасности дорожного движения.
В этой главе будут обсуждаться усилия по обеспечению безопасности дорожного движения, связанные с проектированием и проектированием дорог, просвещением населения и кампаниями по обеспечению соблюдения.Работая в сотрудничестве друг с другом, как описано выше, эти группы могут разделить бремя ответственности за безопасность дорожного движения и разработать комплексные программы для устранения различных факторов, которые могут способствовать ДТП.
Проектирование и проектирование проезжей части
За безопасность дорожного движения отвечают несколько категорий специалистов по транспорту. Вообще говоря, сообщество инженеров по безопасности дорожного движения включает планировщиков транспорта и инженеров.
Транспортное планирование играет решающую роль в определении формы транспортной системы и дает профессионалам возможность на раннем этапе решить проблемы безопасности.Перед тем, как проект дороги будет спроектирован или построен, на него влияет любое количество всеобъемлющих и стратегических транспортных планов, которые скоординированы для обеспечения того, чтобы разрабатываемая система соответствовала видению местного сообщества. Планировщики работают с заинтересованными сторонами, такими как широкая общественность, владельцы бизнеса, политики и адвокаты, чтобы разработать планы того, как транспортная система может наилучшим образом удовлетворить потребности каждой группы.
В прошлом традиционный процесс планирования был сосредоточен на экономическом развитии, качестве окружающей среды и мобильности как трех основных задачах.Большинство государств рассматривают повышение безопасности инфраструктуры как часть проектов по сохранению или усовершенствованию или в рамках эксплуатационных изменений, предпринимаемых транспортными службами. Теперь штаты могут использовать Программу повышения безопасности дорожного движения (HSIP) для финансирования проектов в области безопасности в высокоприоритетных местах. Эта программа позволяет разрабатывать целевые решения и подходы, которые учитывают факторы, способствующие столкновениям, тем самым стремясь достичь более высокой отдачи от инвестиций в безопасность.
Инженеры-дорожники работают над проектированием, строительством и сохранением системы проезжей части.В частности, инженеры должны проектировать дороги, которые сводят к минимуму вероятность аварий, обеспечивая баланс между потребностями в эффективности и мобильности. Инженеры также работают над проектированием дорог и перекрестков таким образом, чтобы свести к минимуму серьезность аварии и риск травм в случае аварии. Инженеры влияют на безопасность застроенной среды, включая вопросы безопасности в процесс планирования в начале проекта; выбор альтернативных вариантов конструкции, в которых приоритетное внимание уделяется соображениям безопасности; использование элементов дизайна, обеспечивающих максимальную безопасность каждого участка дороги или перекрестка; обеспечение качественного и безопасного строительства, эксплуатации и содержания дорог; и решение проблем безопасности на существующих объектах.
Действующие контрмеры
Контрмеры, которые работают 31 — это всеобъемлющий руководящий документ, в котором подробно описаны различные программы и меры, которые эффективны для повышения безопасности. Руководство регулярно публикуется НАБДД.
Улучшения инфраструктуры, такие как мощеные обочины, дорожные полосы и улучшенная видимость в ночное время, могут помешать водителям съехать с проезжей части, и существуют другие возможности для улучшения поведения на обочине дороги и поведения участников дорожного движения.Например, когда водитель съезжает с проезжей части, важно создать придорожную среду, которая снижает вероятность аварий и травм. Придорожные откосы и объекты, такие как дренажные сооружения, деревья и опоры, являются примерами придорожных элементов, на которые инженеры могут ориентироваться для улучшения показателей безопасности дорожного движения. Одним из инженерных методов повышения безопасности на дороге является создание чистой зоны — беспрепятственной проходимой придорожной зоны, которая позволяет водителю безопасно остановиться или восстановить контроль над транспортным средством, выехавшим с проезжей части.
Инженерные решения должны учитывать различные потребности и предпочтения различных групп пользователей. Как упоминалось ранее, это часто означает, что необходимо принимать сложные решения и идти на компромиссы, чтобы прийти к инфраструктурным решениям, которые уравновешивают потребности разных пользователей. Этот компромисс можно проиллюстрировать на примере сигнального пересечения. Повышение безопасности пешеходов на перекрестках может включать добавление времени пешеходного перехода к сигналу или разделение поворотов для исключения конфликтов с высоким риском.Защищенные фазы левого поворота также могут повысить безопасность транспортных средств, как было показано ранее. Но эти новые или более длинные фазы сигнала либо увеличивают продолжительность цикла, либо сохраняют ту же длину, сокращая время на сквозные перемещения. Тем не менее, это приводит к увеличению задержек как для пешеходов, так и для автомобилистов. В таких ситуациях необходимо учесть все эти потребности и выбрать подходящую синхронизацию сигнала, отвечающую потребностям всех пользователей. Соблюдение стандартов проектирования — создание номинальной безопасности — это лишь один из аспектов сложной области проектирования и проектирования дорог.Решение проблем существенной безопасности с помощью стратегий проектирования требует понимания множества точек зрения, компромиссов и потребностей пользователей.
Кампании государственного образования и правоприменения
Целевое исполнение
Чтобы усилить законы о безопасности пешеходов, полицейские управления могут инициировать целенаправленные правоприменительные операции на пешеходных переходах. При таком подходе сотрудник правоохранительных органов в штатском попытается перейти улицу по неконтролируемому пешеходному переходу. Водители, которые не уступают офицеру, будут остановлены, и патрульные машины, ожидающие за пешеходным переходом, либо процитируют их, либо предупредят.Дополнительная информация: https://www.nhtsa.gov/staticfiles/nti/pdf/812059-PedestrianSafetyEnforceOperaHowToGuide.pdf
Общественные образовательные и коммуникационные кампании обычно используются для улучшения отношения и осведомленности участников дорожного движения. Структура и методы проведения этих кампаний могут принимать разные формы. Однако они обычно включают материалы (рекламные объявления в СМИ, информационные брошюры, плакаты, презентации и т. Д.), Чтобы информировать людей о желаемом поведении и преимуществах такого поведения (или, наоборот, о рисках нежелательного поведения).
Хотя отдельные информационные или образовательные кампании могут улучшить осведомленность или восприятие вопросов безопасности дорожного движения, они вряд ли изменят поведение участников дорожного движения. Скорее, эффективными оказались кампании, информирующие общественность об усилении правоохранительных усилий, направленных на то или иное поведение. Эти кампании, которые обычно называют «усилением контроля за соблюдением закона», усиливают предполагаемое исполнение того или иного закона. Когда люди считают, что вероятность быть пойманным высока, они с большей вероятностью будут соблюдать закон.Кампания Click it or Ticket — один из наиболее широко известных примеров принудительного применения закона. В этом случае простого соблюдения закона о ремнях безопасности было недостаточно. Ключом к успеху этой программы стало освещение в СМИ и другие информационные кампании, говорящие общественности о том, что сотрудники правоохранительных органов ищут людей, которые не пристегнуты ремнями безопасности. Другими словами, для тех людей, которые обычно не пристегиваются ремнями безопасности, сам закон не был достаточной мотивацией для изменений. Мотивация возникла из предполагаемой угрозы быть пойманным и выписанным.
Когда специалисты по безопасности анализируют возможные образовательные кампании, они должны учитывать факторы, влияющие на поведение людей, и вероятность того, что кампания изменит такое поведение. Простое сообщение сообщений о безопасности и обеспечение соблюдения законов может не привести к изменению поведения, если дорога спроектирована таким образом, чтобы допускать (или непреднамеренно поощрять) небезопасное поведение. Например, для решения проблемы превышения скорости на широкой многополосной артерии, где заявленная скорость составляет 35 миль в час, принудительное применение и обучение могут быть не единственным решением.Сужение проезжей части и создание большего «визуального трения» вдоль дороги может потребоваться для изменения желаемой расчетной скорости дороги. Дополнительное обучение и кампании по принуждению могут помочь закрепить правильное поведение. Это подчеркивает необходимость сотрудничества и координации между дисциплинами для достижения значимых улучшений в области безопасности дорожного движения.
Безопасное путешествие на велосипеде
«Безопасное путешествие на велосипеде» — это образовательная программа, цель которой — научить детей навыкам безопасности на велосипеде и обучить их.Программа использует интерактивные видео-уроки для обучения детей навыкам безопасной езды на велосипеде и предоставляет ресурсы для родителей и учителей. Доступ к программе можно получить в Интернете по адресу http://www.pedbikeinfo.org/bicyclesaferjourney.
В то время как есть данные, свидетельствующие о некотором успехе хорошо спланированных и проведенных кампаний по обучению безопасности, когда они нацелены на детей, 32 те же результаты не были показаны для подростков и взрослых, когда образовательная кампания стоит отдельно. Несмотря на благие намерения, эти подходы обычно предполагают, что люди не выполняют желаемое поведение просто потому, что им не хватает соответствующей информации.Однако эта идея не принимает во внимание тот факт, что в большинстве случаев человеческое поведение не является результатом сознательного, рационального обдумывания. На людей в значительной степени влияют эмоции, ценности, социальный контекст и культура, а также многие другие факторы. Таким образом, простое представление информации или фактов вряд ли приведет к какому-либо долговременному изменению поведения. В контексте транспортной безопасности большинство людей не проявляют рискованного или нежелательного поведения из-за отсутствия знаний о желаемом поведении.Вместо этого люди действуют на основе множества факторов.
Например, рассмотрим поведение пешехода на неразделенной многополосной магистрали. Цель пешехода — добраться до автобусной остановки, расположенной прямо через дорогу от его текущего местоположения. Пешеход почти наверняка знает, что желаемое поведение — пройти четверть мили до сигнального перекрестка, подождать и пересечь его с сигналом перехода, а затем вернуться на четверть мили до автобусной остановки. Однако вместо этого пешеход предпочитает переходить дорогу посередине квартала.Дело в том, что на решение пешехода пересечь середину квартала влияет множество факторов (время, возможности, погода и т. Д.), Но, вероятно, наиболее важным фактором является то, что это имеет смысл. Люди настроены выбирать вариант, который имеет наиболее интуитивный смысл. Попытки изменить это поведение только с помощью вывесок, плакатов или других образовательных кампаний, скорее всего, будут иметь лишь минимальный эффект.
Подобные примеры можно найти повсюду в области безопасности на транспорте. Большинство людей уже знают, что они должны пристегиваться ремнями безопасности, соблюдать вывешенные знаки ограничения скорости и ограничивать отвлекающие факторы во время вождения.Тем не менее, некоторые люди отказываются пристегивать ремни безопасности, некоторые ускоряются, а некоторые пишут сообщения во время вождения. Одних знаний недостаточно.
Щелкните It or Ticket
Click It or Ticket — это успешная кампания по принудительному использованию ремней безопасности, которая помогла повысить уровень использования ремней безопасности в стране. Программа использует общественное образование для информирования о законах и рисках неиспользования ремней безопасности в различных условиях. Кампании обеспечивают волны просвещения и правоприменения наряду с заметным освещением в СМИ для пропаганды и поддержки кампании.Национальное управление безопасности дорожного движения (NHTSA) ежегодно управляет этой кампанией при содействии государственных служб безопасности дорожного движения, правоохранительных органов и рекламы, оплачиваемой на национальном и местном уровнях.
Эффективность кампании в СМИ
Хорошо спланированные и проведенные кампании в СМИ, посвященные сокращению вождения в состоянии алкогольного опьянения, могут быть эффективными в снижении количества аварий, связанных с употреблением алкоголя. Исследование, проведенное в 2004 году, показало, что в результате таких кампаний количество ДТП, связанных с употреблением алкоголя, снизилось на 13%. 33
Успешные образовательные и правоприменительные кампании признают реальность поведения людей и применяют эти знания для обеспечения безопасности.Например, социальные нормы и культурные влияния могут дать некоторое объяснение того, почему определенные виды поведения являются обычными, даже если они заведомо небезопасны. Маркетинговые вмешательства, основанные на социальных нормах, применялись в отношении отвлеченного вождения и вождения в состоянии алкогольного опьянения. Такие методы позволяют исследовать проблемы безопасности и то, что можно сделать для их решения посредством обучения и правоприменения.
Комплексные программы безопасности
Хотя каждая дисциплина имеет свои сильные стороны, значительные улучшения в безопасности дорожного движения более вероятны, когда программа охватывает несколько дисциплин, а не только одну.Усилия междисциплинарных групп могут решать проблемы безопасности, используя несколько подходов, и поэтому они шире по масштабам, чем отдельные дисциплины, работающие изолированно. Потребность в этом решении «множественного подхода» требует сотрудничества между многими сторонами. Этот тип сотрудничества наиболее ярко проявляется, когда агентства стремятся создать всеобъемлющий план безопасности. Создание комплексного плана безопасности для города, округа или штата должно основываться на данных. При этом агентства сначала начинают с анализа своих данных по безопасности, чтобы определить основные области, в которых сосредоточенные усилия могут привести к наибольшему снижению смертности и серьезных травм.
Государственный стратегический план обеспечения безопасности автомобильных дорог (SHSP) — это пример всеобъемлющего плана безопасности и один из лучших примеров междисциплинарного планирования, основанного на данных. Государственный SHSP обеспечивает основу для разработки скоординированного и комплексного подхода к решению проблем безопасности дорожного движения в государстве. При разработке SHSP государства заинтересованные стороны в области безопасности полетов из всего штата и из разных дисциплин будут учитывать все доступные данные (т. необходимо больше внимания уделять безопасности. 34 Помимо записей о ДТП, агентство может полагаться на альтернативные источники данных, такие как характеристики проезжей части и собственные знания о риске ДТП, для реализации системных стратегий безопасности. Системный подход проактивно определяет места, которые могут иметь высокий риск аварий, но где риск еще не привел к фактическим авариям. 35 Демографические данные, показывающие, где произошел рост населения или где он ожидается, также могут повлиять на планы агентства по обеспечению безопасности. Одним из наиболее важных компонентов SHSP является оценка прошлых усилий, чтобы агентство могло знать, какие стратегии работают, и чтобы прогресс в достижении целей можно было измерять и отслеживать с течением времени.
Планирование безопасности дорожного движения, как и сама область безопасности, носит междисциплинарный характер и основывается на опыте и участии многих сторон. После разработки эти планы безопасности влияют на деятельность, начиная от проектирования и проектирования дорог до правоохранительных органов и просвещения по вопросам безопасности.
Каждое из ведомств и организаций, занимающихся безопасностью перевозок, предлагает уникальный и ценный взгляд на проблему безопасности дорожного движения. Однако их конкурирующие философии, мировоззрения и подходы к решению проблем могут затруднить сотрудничество.Создание основы для эффективного сотрудничества и налаживание процесса поддержки совместных усилий — два способа преодоления этих препятствий. Один из способов создать основу для сотрудничества — убедиться, что каждое агентство понимает влияние, которое его действия оказывают на безопасность дорожного движения, и что каждое из них делает безопасность своим главным приоритетом. Пример Государственного стратегического плана обеспечения безопасности автомобильных дорог демонстрирует этот тип сотрудничества. Процесс SHSP объединяет все потенциальные области безопасности, в том числе: перекрестки, немоторизованные пользователи, сельские аварии и т. д., а также использует подход, основанный на данных, для определения приоритетов и областей, в которых возникает потребность.Эту основу можно еще больше укрепить, определив, какие агентства или организации несут ответственность за реализацию каждой из стратегий, определенных в SHSP.
В США ни один игрок не управляет всеми программами и дисциплинами, влияющими на безопасность дорожного движения. Поэтому сотрудничество между всеми игроками имеет основополагающее значение для постоянного снижения серьезных травм и смертельных исходов.
УПРАЖНЕНИЯ
Стратегический план безопасности дорожного движения
Обеспечивает основу для разработки скоординированного и комплексного подхода к обеспечению безопасности дорожного движения в государстве.
- НАЙДИТЕ веб-сайт вашей государственной или местной программы безопасности дорожного движения. Определите инициативы, которые ваше государственное или местное агентство реализует в области планирования, разработки, образования и правоприменения.
- РАССМАТРИВАЙТЕ гипотетическую ситуацию, когда ваша работа состоит в том, чтобы собрать команду профессионалов для посещения перекрестка с высокой аварийностью и изучения возможных решений проблемы безопасности. Составьте список людей, которые должны быть включены в эту команду, и кратко опишите роль каждого человека.Обязательно рассмотрите множество различных типов программ и стратегий, которые можно использовать для повышения безопасности дорожного движения.
- ВЫБЕРИТЕ область, вызывающую беспокойство, будь то конкретный тип участников дорожного движения или небезопасное поведение, и обсудите, как можно решить или улучшить безопасность дорожного движения в этой тематической области с помощью нескольких дисциплин. Возможные темы включают:
- Старые драйверы
- Пьющие несовершеннолетние
- Усталость или сонливость за рулем
- Пешеходы
К началу
Глава 4 — Участники дорожного движения
Водители автомобилей — далеко не единственные участники дорожного движения, несмотря на то, что на их долю приходится большая часть поездок, совершаемых в США.S. Общественное право проезда на большинстве дорог обычно используется несколькими пользователями, которые передвигаются разными видами транспорта по разным причинам. Специалисты по транспорту должны понимать потребности различных групп пользователей в мобильности и безопасности, а также то, как они взаимодействуют друг с другом, чтобы лучше понимать проблемы безопасности и их возможные решения.
Группы пользователей дорог включают:
- Водители и пассажиры легковых автомобилей
- Водители грузовых автомобилей и другой крупногабаритной техники
- Мотоциклисты
- Пешеходы
- Велосипедисты
Водители и пассажиры легковых автомобилей
Легковые автомобили обычно определяются как седаны, пикапы, минивэны и внедорожники и представляют собой основной вид транспорта для большинства американцев.Поскольку на эти транспортные средства приходится подавляющее большинство зарегистрированных транспортных средств и пройденных миль транспортных средств, неудивительно, что большая часть транспортной инфраструктуры уделяет первоочередное внимание потребностям этих водителей.
Однако, несмотря на то, что приоритет отдается водителям легковых автомобилей, для этих водителей остается много нерешенных вопросов безопасности. В основе большинства этих проблем лежат действия водителя при перемещении по дорожной сети. Инженеры могут работать над тем, чтобы сделать дорогу номинально безопасной, убедившись, что она соответствует последним рекомендациям и стандартам проектирования.Однако водители не всегда взаимодействуют с дорожной системой, как того ожидают проектировщики. Таким образом, номинально безопасная дорога может быть гораздо менее безопасной по существу. В то время как обычная реакция заключалась в предположении, что к аварии привела какая-то неисправность или «ошибка водителя», этот подход не учитывает общий поведенческий принцип, известный как поведенческая адаптация. Проще говоря, поведенческая адаптация относится к бессознательному процессу, посредством которого люди реагируют на свое окружение — людей нельзя рассматривать как константу в системе.
Представьте себе город, который хочет возродить и расширить двухполосную коллекторную дорогу через старый район со зрелыми уличными деревьями. Существующая дорога имеет полосы шириной 9,5 футов, ограничение скорости 30 миль / ч (48 ки / ч) и уличные деревья между проезжей частью и тротуаром. Рекомендации по проектированию могут предлагать типичную ширину полосы движения 12 футов и более широкую свободную зону на обочине дороги. Легко предположить, что самым безопасным выбором будет проектирование дороги с максимально широкими полосами движения и устранением придорожных опасностей.Однако после завершения этого проекта по замене покрытия и расширению как скорость движения, так и тяжесть столкновений на этой дороге могут значительно возрасти. На первый взгляд это может показаться нелогичным.
По сути, большинство людей едут со скоростью, которая кажется им безопасной для . Чтобы достичь этой «безопасной скорости», люди неосознанно оценивают проезжую часть и ее характеристики. Двигаться по узкой извилистой дороге со значительными придорожными препятствиями сложнее, чем по прямой, широкой дороге с большими чистыми зонами, поэтому люди неосознанно едут медленнее и осторожнее по узкой дороге.Когда задача вождения упрощается за счет расширения полос движения и устранения придорожных опасностей, люди не сохранят свое первоначальное поведение. Фактически, следует исходить из предположения, что люди будут адаптироваться к этому изменению и соответственно неосознанно изменят свое поведение, в данном случае увеличивая свою скорость.
Поведенческая адаптация не относится к легковым автомобилям. При проектировании транспортной инфраструктуры инженеры должны учитывать, как поведение человека влияет на всех участников дорожного движения.Проектировщики проезжей части должны проектировать дороги не так, как они хотели бы, чтобы пользователи вели себя, а так, как они действительно ведут себя. Более подробно поведение водителей и других участников дорожного движения будет рассмотрено в Блоке 2.
Водители грузовиков и других крупногабаритных транспортных средств
Большая часть транспортной сети по всей стране обслуживает важные коммерческие нужды. В частности, водители грузовиков играют важную роль в национальной экономике и несут ответственность за перемещение товаров между городами и штатами и внутри них.На большие грузовики приходится только 4 процента зарегистрированных транспортных средств в США, но на них приходится 9 процентов от общего количества пройденных миль транспортных средств и 12 процентов от общего числа погибших в результате дорожно-транспортных происшествий в 2013 году. 36 Эти большие грузовики делят пространство на дорогах с пассажирами транспортных средств, и имеют свои собственные потребности в безопасности. На национальном уровне в 2013 году в авариях с участием больших грузовиков погибло чуть менее 4000 человек, и 71 процент из них были пассажирами другого транспортного средства, участвовавшего в аварии. Однако безопасность больших грузовиков со временем повысилась.В период с 2004 по 2013 год пробег больших грузовиков увеличился примерно на 25 процентов, а количество смертельных случаев с участием больших грузовиков снизилось примерно на 20 процентов (с 4902 до 3906). 37
Коммерческие грузовики — не единственные крупногабаритные автомобили на дорогах. Транспортные средства также занимают место на проезжей части, хотя обычно они обслуживают пешеходов и велосипедистов. Транспортные средства, которые делят пространство с легковыми автомобилями, также имеют уникальные потребности и проблемы. Многие проблемы безопасности, связанные с транзитными автомобилями, аналогичны проблемам с большими грузовиками.Операторы автобусов должны учитывать, как остановка движения влияет на поток и работу транспортной системы, а также должны учитывать безопасность своих пассажиров при посадке и высадке из транспортного средства.
Проектирование дорог, подходящих для больших транспортных средств, иногда может напрямую противоречить дизайну, ориентированному на пешеходов и велосипедистов. Например, пешеходу удобнее переходить перекресток, если повороты очень крутые, когда расстояние между поворотами сведено к минимуму, чтобы сократить расстояние ходьбы и сократить время нахождения на проезжей части.Однако для больших грузовиков и автобусов требуется больший радиус поворота (по сравнению с легковыми автомобилями) для безопасного поворота. При проектировании перекрестков для больших грузовиков дизайнеры стремятся увеличить пространство на перекрестке и расширить углы. Это изменение упростит поворот, но также станет более неудобным (и, возможно, менее безопасным) для пешеходов. Как описано ранее, эти компромиссы необходимо оценивать и обсуждать при планировании дорожных проектов.
Мотоциклисты
В последние годы мотоспорт становится все более популярным в США.S. С 2000 года количество зарегистрированных мотоциклов в США почти удвоилось. 38,39 В результате число погибших мотоциклистов увеличилось на 71% (с 2897 в 2000 году до 4957 в 2012 году). На мотоциклисты приходилось 15 процентов всех ДТП в 2012 году по сравнению с 7 процентами смертей в 2000 году. 40 Мотоциклисты значительно превышают количество погибших в дорожно-транспортных происшествиях, поскольку в 2012 году на их долю приходилось всего 3 процента зарегистрированных транспортных средств и 0,7 процента от общего количества пройденных ими миль. 41
В целом, многие модификации проезжей части, сделанные для повышения безопасности легковых автомобилей, могут стать проблемой для мотоциклистов. Грохочущие полосы могут быть труднопроходимыми, особенно на низких скоростях. Поручни, в частности ограждения для кабелей, могут представлять серьезную опасность для мотоциклиста, столкнувшегося с ним на высокой скорости. В условиях вождения мотоциклисты малы по сравнению с более крупными транспортными средствами, и их трудно увидеть, особенно рано или поздно днем, когда уровень освещения ниже.
Пешеходы
Ходьба — это самый простой вид транспорта. В какой-то момент в течение обычного дня почти каждый человек становится пешеходом. Люди идут пешком, чтобы добраться до автобусной остановки, чтобы пойти из дома в школу или добраться от припаркованного автомобиля к входной двери офиса. Некоторые пешие прогулки совершаются по необходимости — не все домохозяйства владеют автомобилем, 42 , а дети и люди с ограниченными возможностями могут не иметь возможности водить машину. Гораздо больше пеших прогулок совершается по собственному желанию, особенно для физических упражнений или здоровья.Опрос 2012 года показал, что 39 процентов пеших прогулок совершаются в целях физических упражнений или личного здоровья. 43 Пешие прогулки также более распространены в густонаселенных городских районах из-за непосредственной близости пунктов назначения и других услуг, таких как остановки общественного транспорта.
Согласно Национальному исследованию путешествий домашних хозяйств (NHTS) за 2009 год, независимо от причин, по которым люди ходят пешком, на этот режим приходится почти 11 процентов всех поездок, совершаемых в США. 44 По данным NHTS, около трети всех поездок совершаются в США.S. короче одной мили, и 35 процентов этих поездок совершаются пешком. Данные исследования мнения и восприятия путешественников (TOP) 2005 года, проведенного FHWA, показали, что около 107,4 миллиона американцев (51 процент путешествующих) используют ходьбу в качестве обычного способа передвижения. 45
Пешеходы (наряду с велосипедистами) относятся к числу наиболее уязвимых участников дорожного движения, что отражено в данных о ДТП. 4743 пешехода, убитых в 2012 году, составили 14,1 процента от общего числа погибших в дорожно-транспортных происшествиях в США.С. того года. В период с 2008 по 2012 год смертность от автотранспортных средств снизилась на 13 процентов, а число погибших среди пешеходов увеличилось на 8 процентов. Среди пешеходов есть определенные группы, которые особенно уязвимы. К ним относятся маленькие дети, пожилые люди и люди с ограниченными возможностями.
Дорожная диета
В 2008 году Министерство транспорта Сиэтла внедрило режим дорожного движения на 1,9-километровом участке дороги Stone Way на север от N 34-й улицы до N 50-й улицы.Этот сегмент Stone Way North не только обслуживает автомобили, но и помогает соединить велосипедную дорожку с парком. В пяти кварталах восемь школ, две библиотеки и пять парков.
Изначально модифицированный сегмент представлял собой четырехполосную проезжую часть, пропускающую 13 000 автомобилей в день. Для этого коридора в генеральном велоплане города на 2007 год рекомендованы полосы для лазания и разметка общих полос (ранее известная как «шарроу»). Поперечное сечение уменьшило количество полос движения, чтобы добавить велосипедные полосы и парковку с обеих сторон.В результате коридора была уменьшена скорость 85 -го процентилей, в то время как общая пропускная способность осталась относительно неизменной, несмотря на сокращение количества полос. Количество велосипедистов в коридоре увеличилось на 35 процентов, но количество ДТП с участием велосипедистов не увеличилось. После реализации проекта количество дорожно-транспортных происшествий с участием пешеходов сократилось на 80 процентов.
По материалам статьи о дорогах общего пользования 2011 г .:
http://www.fhwa.dot.gov/publications/publicroads/11septoct/05.куб. метр
Дети младшего возраста являются уязвимой группой участников дорожного движения, и они с большей вероятностью, чем взрослые, будут полагаться на ходьбу как на основной вид транспорта, особенно до того, как станут достаточно взрослыми, чтобы водить машину. Одной из проблемных областей является создание безопасных условий для маленьких детей, когда они ходят в школу пешком. Специалисты по безопасности должны обеспечить, чтобы на тротуарах и уличных переходах были приняты соответствующие меры, чтобы помочь детям безопасно путешествовать, и обучать детей правилам безопасной ходьбы.
Еще одна уязвимая часть пешеходов — слепые и слабовидящие.Эти пешеходы сталкиваются с повышенными трудностями при безопасном перемещении по дороге, особенно на уличных переходах. Проблемы, с которыми сталкивается слепой или слабовидящий пешеход, включают поиск подходящей точки пересечения в углу или в середине квартала, определение подходящего времени для пересечения и быстрое и точное пересечение. Как переход, так и переход по наклонному тротуару может быть одинаково трудным для человека в инвалидной коляске, где даже небольшие трещины или неровности на тротуаре могут стать серьезными препятствиями.Сложность этих проблем возрастает в местах с необычной геометрией, нерегулярными сигналами времени или безостановочным потоком транспортных средств, таких как круговые перекрестки и полосы движения с разделенными каналами.
Пожилые люди тоже сталкиваются с множеством проблем. Существует ряд возрастных изменений, которые влияют на функциональную способность пожилых людей безопасно ходить и переходить улицу. Эти изменения включают снижение физических возможностей, сенсорного восприятия, когнитивных навыков и отставание в рефлексивных реакциях. Ухудшение зрения может снизить способность пожилого человека видеть и читать указатели, замедлять их реакцию и снижать их способность определять скорость или близость приближающегося транспортного средства. 46
Водители и пешеходы разделяют ответственность за гибель многих пешеходов, поскольку обе стороны пытаются перемещаться по одному и тому же пространству одновременно. Хотя мы знаем, что определенные факторы могут привести к более серьезным авариям с участием пешеходов, например скорость, 47 , ни одна причина не выделяется как основной фактор, способствующий авариям с участием пешеходов. По этой причине никакая одна контрмера сама по себе, вероятно, не окажет существенного влияния на количество дорожно-транспортных происшествий с пешеходами.Успешная программа контрмер должна включать сочетание инженерных, экологических, образовательных и правоприменительных мер для повышения безопасности пешеходов. 48
Велосипедисты
Велосипедисты были одними из первых пользователей дорог в США и группой, которая сделала первый шаг в улучшении дорожных условий. В последние годы велосипедный спорт стал популярным как для отдыха, так и для передвижения. Данные NHTS за 2009 год показали, что, хотя только 1 процент всех поездок совершается на велосипеде, количество поездок на велосипеде удвоилось с 1990 по 2009 год. 49
В то время как велосипедисты составляют только 1 процент всех поездок, 726 велосипедистов со смертельным исходом в 2012 году составили 2 процента от всех дорожно-транспортных происшествий со смертельным исходом в этом году. 50 Хотя число убитых велосипедистов с 2008 года увеличилось лишь незначительно, снижение смертности от автотранспортных средств означает, что на велосипедистов приходится все большая доля погибших в дорожно-транспортных происшествиях.
Как участники дорожного движения велосипедисты сталкиваются с уникальными проблемами. Чаще всего велосипедисты делят пространство с автомобилями и в большинстве мест считаются законными пользователями дороги.Многим потенциальным велосипедистам неудобно делить дорогу с интенсивным автомобильным движением, и их могут отпугнуть от езды на велосипеде. Перекрестки также могут стать проблемой для велосипедистов, если на них много движения с поворотами и большое количество полос. Эти препятствия для езды на велосипеде, оживленные участки улиц и перекрестки часто отпугивают потенциальных гонщиков, даже если остальная часть велосипедной сети удобна. Многие велосипедисты готовы изо всех сил использовать маршрут с меньшими объемами и скоростью транспортных средств или велосипедные сооружения, которые отделены от движения.Безопасные велосипедные сооружения также могут улучшить доступ к магазинам, общественному транспорту, рабочим местам, школам и основным службам.
Заключение
Успешные программы безопасности дорожного движения будут учитывать потребности всех пользователей при планировании и разработке транспортных проектов. Каждая группа пользователей играет важную роль в транспортной системе, и у каждой есть уникальные потребности в безопасности, которые необходимо учитывать специалистам по безопасности. На решения участников дорожного движения влияет множество факторов, и комбинации факторов, которые приводят к определенному поведению во время поездки, не могут быть легко классифицированы или поняты в простых терминах.
УПРАЖНЕНИЯ
- ПРЕДОСТАВЬТЕ пример дорожного проекта, в котором изменения привели к улучшениям для одной группы пользователей, но отрицательно повлияли на другую группу. Этот пример может быть гипотетическим или основан на реальном опыте.
- ПОСЕТИТЕ домашнюю страницу энциклопедии системы отчетности по анализу смертности (FARS) (https://www-fars.nhtsa.dot.gov/Main/index.aspx). Используйте имеющиеся данные за последний год, чтобы задокументировать количество погибших для различных групп участников дорожного движения, обсуждаемых в этой главе (например,грамм. автомобилисты, пешеходы, велосипедисты). Какую еще информацию о безопасности участников дорожного движения вы можете найти с помощью инструментов, доступных в FARS, и какие данные не включены?
К началу
К началу
Общие
- СЛУЖБА УВД
- Основная цель системы УВД — предотвратить столкновение с воздушным судном, работающим в системе.
- Помимо своего основного назначения, система УВД также:
- Обеспечивает безопасный, упорядоченный и быстрый поток воздушного движения.
- Поддерживает миссии национальной безопасности и обороны страны.
- Система УВД должна предоставлять определенные дополнительные услуги в разрешенной степени. Предоставление дополнительных услуг не является необязательным со стороны контролера, а скорее требуется, когда позволяет рабочая ситуация.Признано, что предоставлению этих услуг могут препятствовать различные факторы, включая, но не ограничиваясь:
- Объем трафика.
- Перегрузка частоты.
- Качество наблюдения.
- Рабочая нагрузка контроллера.
- Обязанности высшего приоритета.
- Физическая неспособность сканировать и обнаруживать ситуации, подпадающие под эту категорию.
- Диспетчеры должны предоставлять диспетчерское обслуживание в соответствии с процедурами и минимумами, указанными в этом порядке, за исключением случаев, когда существует одно или несколько из следующих условий:
- Отклонение необходимо для соответствия Документам ИКАО, Национальным правилам полетов или специальным соглашениям, в которых U.S. предоставляет службы управления воздушным движением в воздушном пространстве за пределами США и их владений или:
ПРИМЕЧАНИЕ-
Пилоты должны соблюдать CFR или другие применимые правила независимо от применения какой-либо процедуры или минимумов в этом порядке.
- Другие процедуры / минимумы прописаны в письме-соглашении, директиве FAA или военном документе, или:
ПРИМЕЧАНИЕ-
Эти процедуры могут включать резервирование высоты, дозаправку в воздухе, операции с истребителями-перехватчиками, правоохранительные органы и т. Д.
СПРАВКА-
Приказ FAA JO 7110.65, параграфы 1-1-10, Процедурные письма-соглашения (LOA).
- Отклонение необходимо для помощи воздушному судну в случае объявления аварийной ситуации.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-1-6, Предупреждение о безопасности.
Приказ FAA JO 7110.65, глава 10, Чрезвычайные ситуации.
Приказ FAA JO 7110.65, параграф 5-1-8, Целевые процедуры слияния.
- Услуги управления воздушным движением не предоставляются для моделей самолетов, работающих в NAS, или для любых БПЛА, работающих в NAS на высоте 400 футов над уровнем земли или ниже.
ПРИМЕЧАНИЕ-
- Это не запрещает УВД предоставлять услуги БПЛА гражданского и общественного назначения.
- Положения этого пункта применяются к моделям самолетов, эксплуатируемых на любой высоте. Для всех других БПЛА этот параграф применяется только к тем БПЛА, которые полностью работают на высоте 400 футов над уровнем моря или ниже.
СПРАВКА-
Термин P / CG — Модель самолета.
- ПРИОРИТЕТ ОБЯЗАННОСТЕЙ
- Уделите первоочередное внимание разделению самолетов и выдаче предупреждений о безопасности, как это требуется в этом приказе.При расстановке приоритетов для всех других положений этого приказа необходимо использовать здравый смысл, исходя из требований конкретной ситуации.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-1-6, Предупреждение о безопасности.
ПРИМЕЧАНИЕ-
Поскольку здесь задействовано множество переменных, практически невозможно разработать стандартный список приоритетов обязанностей, который бы применялся единообразно во всех мыслимых ситуациях. Каждый набор обстоятельств должен оцениваться по отдельности, и, когда требуется более одного действия, контролеры должны действовать наилучшим образом, основываясь на известных им фактах и обстоятельствах.В первую очередь выполняется то действие, которое является наиболее важным с точки зрения безопасности.
- Оказывать поддержку деятельности в области национальной безопасности и обороны страны, включая, помимо прочего, сообщение о подозрительных и / или необычных действиях самолетов / пилотов.
СПРАВКА-
Приказ FAA JO 7610.4 Специальные операции.
- Предоставлять и / или запрашивать информацию о погоде в соответствии с процедурами и требованиями, изложенными в этом порядке.
ПРИМЕЧАНИЕ-
Диспетчеры несут ответственность за ознакомление с текущей метеорологической информацией, необходимой для выполнения обязанностей УВД.
- Предоставляйте дополнительные услуги, насколько это возможно, в зависимости только от более приоритетных обязанностей и других факторов, включая ограничения радара, объем трафика, перегрузку частот и рабочую нагрузку.
- ПРОЦЕДУРНЫЕ ПРЕДПОЧТЕНИЯ
- Используйте процедуры автоматизации вместо процедур, не связанных с автоматизацией, когда это позволяют рабочая нагрузка, связь и возможности оборудования.
- Используйте радиолокационное разделение вместо нерадиолокационного разделения, когда это дает операционные преимущества, а рабочая нагрузка, связь и оборудование позволяют.
- Используйте нерадиолокационное эшелонирование вместо радарного эшелонирования, когда ситуация диктует получение операционного преимущества.
ПРИМЕЧАНИЕ-
Одна из ситуаций может заключаться в том, что вертикальное разделение исключает чрезмерное векторизацию.
- ПРИОРИТЕТ ДЕЯТЕЛЬНОСТИ
Признано, что поток трафика может повлиять на способность контроллера обеспечивать приоритетную обработку.Однако, без ущерба для безопасности, в каждой ситуации необходимо использовать здравый смысл, чтобы облегчить наиболее быстрое передвижение приоритетных воздушных судов. Предоставлять авиадиспетчерское обслуживание воздушным судам по принципу «первым пришел — первым обслужен», если позволяют обстоятельства, за исключением следующих случаев:
ПРИМЕЧАНИЕ-
Отмена плана полета по ППП является исключительной прерогативой пилота. Однако сохранение пилотом плана полета по ППП не дает приоритета над самолетом по ПВП. Например, это не исключает требования к пилоту прибывающего воздушного судна по ПВП при необходимости корректировать траекторию полета для ввода схемы движения в последовательности с прибывающим воздушным судном по ПВП.
- Воздушное судно, терпящее бедствие, имеет преимущественное право над всеми остальными воздушными судами.
СПРАВКА-
14 CFR, раздел 91.113 (c).
- К полетам санитарной авиации относитесь следующим образом:
- Обеспечивать приоритетное обслуживание рейсов гражданской авиации скорой помощи, когда пилот в радиопередачах устно идентифицирует рейс, произнося «MEDEVAC», за которым следует разрешенный позывной FAA или полные буквы / номера гражданской регистрации.В каждой ситуации необходимо использовать здравый смысл, чтобы облегчить наиболее быстрое перемещение воздушного судна для медицинской эвакуации.
ПРИМЕЧАНИЕ-
Если план полета включает букву «L» для «МЕДИЦИНСКАЯ ЭВАКАЦИЯ» и / или включает «СРЕДНЯЯ ЭВАКУАЦИЯ» в Пункте 11 (Примечания) плана полета или Пункте 18 (Прочая информация) международного плана полета, записи считаются информационными в только характер, а не определение оперативного приоритета.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-4-20, Идентификация воздушного судна.
- Обеспечение приоритетного обслуживания рейсов AIR EVAC и HOSP по устной просьбе пилота.
ПРИМЕЧАНИЕ-
Если план полета включает «HOSP» или «AIR EVAC» в Пункте 11 (Примечания) или Пункте 18 (Прочая информация) международного плана полета, записи считаются только информационными по своему характеру, а не указанием на эксплуатационный приоритет. Для идентификации самолета в радиопередачах гражданские пилоты будут использовать обычные позывные при подаче «HOSP», а военные пилоты будут использовать позывной «EVAC».
- Помогите пилотам самолетов MEDEVAC, AIR EVAC и HOSP избегать участков со значительными погодными и неблагоприятными условиями.
- По запросу пилота предоставить дополнительную помощь (например, уведомления по стационарной линии) для ускорения наземного обслуживания пациентов, жизненно важных органов или срочно необходимых медицинских материалов.
- Обеспечение приоритетного обслуживания и ускорение движения президентского самолета и сопровождающих его лиц, а также любых аварийно-спасательных самолетов, а также соответствующие контрольные сообщения, когда позволяют условия движения и средства связи.
ПРИМЕЧАНИЕ-
Используемые здесь термины президентский самолет и свита включают самолет и окружение президента, вице-президента или других общественных деятелей, назначенных Белым домом.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-4-20, Идентификация воздушного судна.
Приказ FAA JO 7110.65, параграф 4-3-2, Разрешения на вылет.
Приказ FAA JO 7210.3, параграф 5-1-1, Предварительное согласование.
- Обеспечение приоритетного обслуживания и максимальной помощи самолетам SAR, выполняющим миссию SAR.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 10-1-3, Предоставление помощи.
- Обеспечьте приоритетное обслуживание и максимальную помощь для ускорения движения самолетов-перехватчиков при выполнении активных задач противовоздушной обороны до тех пор, пока неизвестный самолет не будет идентифицирован.
- Обеспечивать приоритетное обслуживание самолетов NIGHT WATCH, когда NAOC (произносится как NA-YOCK) указывается в разделе примечаний плана полета или в сообщениях воздух / земля.
ПРИМЕЧАНИЕ-
Термин «NAOC» не будет частью позывного, но может использоваться, когда воздушное судно находится в воздухе, для обозначения запроса на особую обработку.
СПРАВКА-
Приказ FAA JO 7610.4, параграф 12-1-1, Приложения.
- Обеспечение приоритетного обслуживания любого гражданского или военного самолета, использующего кодовое название «FLYNET».
СПРАВКА-
Приказ FAA JO 7110.65, параграф 9-2-5, FLYNET.
Приказ FAA JO 7610.4, параграф 12-4-1, Полеты «FLYNET», аварийные группы по ядерной безопасности.
- Предоставляйте приоритетное обслуживание воздушным судам, используя кодовое название «Garden Plot», только когда CARF уведомляет вас о том, что такой приоритет разрешен. По любым вопросам, касающимся процедур полета, обращайтесь в CARF для решения.
ПРИМЕЧАНИЕ-
Полеты на Garden Plot требуют приоритетного движения и координируются военными с CARF. Государственный орган свяжется с региональным администратором, чтобы согласовать приоритет передвижения войск Национальной гвардии в пределах конкретного штата.
- Обеспечение приоритетного обслуживания самолетов ВВС США, участвующих в задачах по отбору проб / съемке с воздуха, с использованием позывного «SAMP».
СПРАВКА-
Приказ FAA JO 7110.65, параграфы 9-2-17, полеты SAMP.
Приказ FAA JO 7210.3, параграф 5-3-2, Отбор проб с воздуха / обследование на предмет радиоактивного загрязнения.
Приказ FAA JO 7610.4, параграф 12-4-3, Отбор проб с воздуха / обследование на предмет радиоактивного загрязнения.
- Обеспечивать приоритетное обслуживание самолетов специальной воздушной миссии, когда SCOOT указан в разделе примечаний плана полета или используется для связи воздух / земля.
ПРИМЕЧАНИЕ-
Термин «SCOOT» не будет частью позывного, но может использоваться, когда воздушное судно находится в воздухе, для обозначения запроса на особую обработку.
СПРАВКА-
Приказ FAA JO 7610.4, параграф 12-6-1, Приложения.
- По запросу предоставьте приоритетное обслуживание самолетам миссии TEAL и NOAA.
СПРАВКА-
Приказ FAA JO 7110.65, параграфы 9-2-19, Погодные разведывательные полеты.
- Обеспечение приоритетного обслуживания для ускорения выполнения наблюдательных и демонстрационных полетов (F и D) по Договору «ОТКРЫТОЕ НЕБО».
ПРИМЕЧАНИЕ-
Воздушное судно Договора об открытом небе (F и D) имеет приоритет над всем «обычным» воздушным движением. «Регулярные» — это все воздушные перевозки, кроме:
- Чрезвычайные ситуации
- Самолеты принимают непосредственное участие в президентском движении.
- Силы или действия в реальном бою.
- МЕДЭВАК и активные поисково-спасательные миссии.
- Самолеты AIR EVAC и HOSP, запросившие приоритетное обслуживание.
СПРАВКА-
Приказ FAA JO 7110.65, параграфы 9-2-22, Самолеты Договора об открытом небе.
Приказ FAA JO 7210.3, параграфы 5-3-5, Приоритетные полеты воздушных судов по Договору об открытом небе (F и D).
Договор по открытому небу, Договорный документ, 102–37.
- Обеспечьте приоритетное обслуживание, необходимое для ускорения полета воздушного судна.
ПРИМЕЧАНИЕ-
Признано, что неожиданные ветровые условия, погода или интенсивные транспортные потоки могут повлиять на способность диспетчера обеспечивать приоритет или особую обработку в заданное время.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 9-1-3, Летная проверка самолетов.
- Воздушное судно IFR должно иметь приоритет над самолетом SVFR.
СПРАВКА-
Приказ FAA JO 7110.65, Глава 7, Раздел 5, Особые ПВП (SVFR).
- На воздушные суда, выполняющие рейсы по Североамериканской программе маршрутов (NRP), не распространяются ограничения по маршрутам (например, опубликованные предпочтительные маршруты по ППП, требования к письму-соглашению, стандартные эксплуатационные процедуры).
СПРАВКА-
Приказ FAA JO 7110.65, параграфы 2-3-2, Ввод данных на маршруте.
Приказ FAA JO 7110.65, параграфы 2-2-15, Информация о Североамериканской программе маршрутов (NRP).
Приказ FAA JO 7110.65, параграф 4-2-5, Поправки к маршруту или высоте.
Приказ FAA JO 7210.3, глава 18, раздел 17, Североамериканская программа маршрутов.
- Если возможно, предоставьте приоритетное обслуживание перенаправленным рейсам. Приоритетное обслуживание может быть запрошено путем использования «DVRSN» в разделе примечаний плана полета или путем размещения рейса в Diversion Recovery Tool (DRT).
СПРАВКА-
Приказ FAA JO 7210.3, параграф 18-4-5, восстановление после переадресации.
- Если возможно, обеспечьте приоритетное обслуживание рейсов FALLEN HERO, когда «FALLEN HERO» указано в разделе примечаний плана полета или запрашивается в сообщениях воздух / земля.
- ЭКСПЕДИЦИОННОЕ СОБЛЮДЕНИЕ
- Используйте слово «немедленно» только тогда, когда требуется быстрое соблюдение требований, чтобы избежать неминуемой ситуации.
- Используйте слово «ускорить» только тогда, когда требуется быстрое соблюдение, чтобы избежать развития неизбежной ситуации.Если диспетчер УВД дает разрешение на «ускоренный» набор высоты или снижение, а впоследствии поддерживаемая высота изменяется или повторно устанавливается без указания ускоренного режима, указание об ускорении отменяется.
- В любом случае, если позволяет время, укажите причину этого действия.
- ПРЕДУПРЕЖДЕНИЕ О БЕЗОПАСНОСТИ
Подать на самолет предупреждение о безопасности, если вы знаете, что он находится на такой высоте / высоте, которая, по вашему мнению, делает его небезопасной близостью к местности, препятствиям или другим летательным аппаратам.Как только пилот проинформирует вас, что предпринимаются действия для разрешения ситуации, вы можете прекратить выдачу дальнейших предупреждений. Не думайте, что из-за того, что кто-то другой несет ответственность за самолет, небезопасная ситуация была обнаружена и было выпущено предупреждение о безопасности; проинформируйте соответствующего диспетчера.
ПРИМЕЧАНИЕ-
- Выдача предупреждения о безопасности является первоочередной задачей (см. Параграф 2-1-2, «Приоритет дежурства»), когда диспетчер наблюдает и распознает ситуацию небезопасной близости воздушного судна к местности, препятствиям или другому воздушному судну.Условия, такие как рабочая нагрузка, объем трафика, качество / ограничения радиолокационной системы и доступное время для реагирования, являются факторами, определяющими, разумно ли диспетчеру наблюдать и распознавать такие ситуации. Хотя диспетчер не может сразу увидеть развитие каждой ситуации, в которой должно быть выдано предупреждение о безопасности, диспетчер должен сохранять бдительность в таких ситуациях и выдавать предупреждение о безопасности, когда ситуация распознается.
- Распознавание ситуаций небезопасной близости может быть результатом MSAW / E-MSAW, автоматических считываний высоты, оповещения о конфликте / режиме C, наблюдений с помощью системы PAR или отчетов пилота.
- После выдачи предупреждения исключительно пилот должен определить, какие действия будут предприняты, если таковые имеются.
- Предупреждение о местности / препятствиях. Немедленно выдать / инициировать оповещение воздушного судна, если вы знаете, что летательный аппарат находится на высоте, которая, по вашему мнению, делает его небезопасной близостью к местности и / или препятствиям. Подайте оповещение следующим образом:
ФРАЗЕОЛОГИЯ —
НИЗКАЯ ВЫСОТА (позывной),
НЕМЕДЛЕННО ПРОВЕРЬТЕ ВАШУ ВЫСОТУ.
и, если самолет еще не совершил заход на посадку,
(При необходимости) MEA / MVA / MOCA / MIA В ВАШЕЙ ЗОНЕ ЯВЛЯЕТСЯ (высота).
СПРАВКА-
Срок действия P / CG — Окончательный подход — IFR
- Конфликт с самолетом / Оповещение о нарушителях в режиме C. Немедленно выдать / инициировать оповещение о воздушном судне, если вам известно о другом воздушном судне, находящемся на высоте, которая, по вашему мнению, создает для него небезопасную близость. Если возможно, предложите пилоту альтернативный курс действий.Когда будет предложен альтернативный курс действий, завершите передачу словом «немедленно».
ФРАЗЕОЛОГИЯ —
СИГНАЛ ДВИЖЕНИЯ (позывной) (положение самолета) СОВЕТУЙТЕ ПОВЕРНУТЬ ВЛЕВО / ВПРАВО (курс),
и / или
НЕМЕДЛЕННО НАБОР / СПУСК (на определенной высоте).
ПРИМЕР —
«Дорожное оповещение, Cessna Three Four Juliet, 12 часов, 1 миля, советую вам немедленно повернуть налево».
или
«Дорожная тревога, Cessna Three-Four Juliet, 12 часов, 1 миля, советую повернуть налево и немедленно подниматься.”
СПРАВКА-
Приказ FAA JO 7110.65, параграф 5-14-1, оповещение о конфликте (CA) и оповещение о нарушителях режима C (MCI).
Приказ FAA JO 7110.65, параграф 5-14-2, Предупреждение о минимальной безопасной высоте на маршруте (E-MSAW).
Приказ FAA JO 7110.65, параграфы 5-15-6, CA / MCI.
Приказ FAA JO 7110.65, параграф 5-2-24, Фильтры высоты.
Приказ FAA JO 7110.65, параграф 2-1-21, Информация о дорожном движении.
- НЕИСПРАВНОСТИ ОБОРУДОВАНИЯ СВЕТА
- Когда пилот сообщает о неисправности бортового оборудования, определите характер и степень желаемого особого обращения.
ПРИМЕЧАНИЕ-
Неисправности бортового оборудования включают частичный или полный отказ оборудования, который может повлиять либо на безопасность полетов, стандарты эшелонирования и / или возможность полета по ППП, либо в воздушном пространстве с сокращенным минимумом вертикального эшелонирования (RVSM) в системе УВД. Диспетчеры могут ожидать от пилотов отчетов о возможностях VOR, TACAN, ADF, GPS, RVSM или низкочастотных навигационных приемниках, об ухудшении связи воздух-земля или о другом оборудовании, которое пилот сочтет подходящим (например,г., бортовой метеорологический радар). Пилоты должны сообщать о характере и объеме любой помощи, которую требуется от УВД.
- Предоставьте максимально возможную помощь в соответствии с оборудованием, рабочей нагрузкой и любыми необходимыми условиями обращения.
- Передача другим диспетчерам или средствам, которые впоследствии будут управлять воздушным судном, всей относящейся к нему информации, касающейся воздушного судна, и любых требуемых или предоставляемых специальных услуг.
- МИНИМАЛЬНОЕ ТОПЛИВО
Если самолет объявляет состояние «минимального количества топлива», проинформируйте любой объект, которому передана юрисдикция управления, о проблеме с минимальным количеством топлива и будьте готовы к любому происшествию, которое может задержать самолет в пути.
ПРИМЕЧАНИЕ-
Использование термина «минимальное количество топлива» означает признание пилотом того, что его / ее запас топлива достиг состояния, при котором по прибытии в пункт назначения он / она не может согласиться с какой-либо неоправданной задержкой. Это не аварийная ситуация, а просто предупреждение, указывающее, что аварийная ситуация возможна в случае возникновения неоправданной задержки. Рекомендация о минимальном количестве топлива не подразумевает необходимости в приоритете движения. Здравый смысл и рассудительность определят степень помощи, которая будет оказана в ситуациях с минимальным количеством топлива.Если в какой-либо момент оставшийся запас топлива указывает на необходимость приоритета движения для обеспечения безопасной посадки, пилот должен объявить аварийную ситуацию и сообщить об оставшемся топливе через несколько минут.
- СООБЩЕНИЕ ОСНОВНОЙ ИНФОРМАЦИИ О РЕЙСАХ
Как можно скорее сообщайте соответствующему FSS, офису менеджера аэропорта, ARTCC, пункту управления подходом, операционному или военному управлению любую информацию, касающуюся компонентов NAS или любых условий полета, которые могут отрицательно повлиять на безопасность полетов.
ПРИМЕЧАНИЕ-
FSS несут ответственность за классификацию и рассылку уведомлений летчикам.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 3-3-3, Своевременная информация.
Приказ FAA JO 7110.65, параграф 5-1-6, Ограничения обслуживания.
Приказ FAA JO 7210.3, параграф 3-1-2, Периодическое обслуживание.
USN, см. OPNAVINST 3721.30.
- НЕИСПРАВНОСТИ НАВИДА
- Когда самолет сообщает о неисправности наземной NAVAID, выполните следующие действия:
- Запросите отчет со второго самолета.
- Если второй самолет сообщает о нормальной работе, продолжайте движение и сообщите об этом первому самолету. Зарегистрируйте инцидент в форме 7230-4 FAA или в соответствующей военной форме.
- Если второй самолет подтверждает неисправность или в отсутствие отчета второго самолета, активируйте резервное оборудование или запросите активацию средства контроля.
- Если после активации резервного оборудования сообщается о нормальной работе, продолжайте использование, запишите инцидент в форме 7230-4 FAA или в соответствующей военной форме и уведомите технический эксплуатационный персонал (системного инженера ARTCC, когда задействована помощь на маршруте).
- Если после активации резервного оборудования сообщается о продолжающейся неисправности или резервное оборудование не может быть активировано, проинформируйте технический персонал и попросите совета о том, следует ли отключать вспомогательное средство. При отсутствии отчета о втором воздушном судне сообщите техническому персоналу о времени первоначального донесения с воздушного судна и предполагаемом времени, в течение которого может быть получено сообщение о втором воздушном судне.
- Когда самолет сообщает об аномалии GPS или WAAS, запросите следующую информацию и / или выполните следующие действия:
- Запишите следующую минимальную информацию:
- Марка, модель и позывной самолета.
- Местоположение или положение и высота в то время, когда наблюдалась аномалия GPS или WAAS.
- Дата / время возникновения.
- Запросите отчет со второго самолета.
- Зарегистрируйте инцидент в форме 7230-4 FAA или в соответствующей военной форме.
- Сообщите другим воздушным судам об аномалии, как указано в пунктах 4-8-1j или k, в зависимости от обстоятельств.
ФРАЗЕОЛОГИЯ —
ВНИМАНИЕ ВСЕ САМОЛЕТЫ, GPS СООТВЕТСТВУЮТ НЕДОСТАТОЧНЫМ (ИЛИ НЕДОСТУПНЫМ) В РАЙОНЕ / РАЙОНЕ (положение).
ПРИМЕР —
«Внимание, все самолеты, GPS сообщил о ненадежности (или о недоступности WAAS) в районе 30 миль к югу от VOR Вако».
- Когда пилот сообщает об аномалии WAAS, определите у пилота, какие признаки он или она наблюдает, и запишите информацию в соответствии с подпунктом b выше.
- ИСПОЛЬЗОВАНИЕ MARSA
- MARSA может применяться только к военным операциям, указанным в письме-соглашении или другом соответствующем FAA или военном документе.
ПРИМЕЧАНИЕ-
Применение MARSA — прерогатива военного командования. Он не будет применяться без разбора отдельными подразделениями или пилотами. Он будет использоваться только для операций IFR, требующих его использования. Команды, санкционирующие MARSA, должны гарантировать, что его реализация и условия использования задокументированы и согласованы с контролирующим агентством, имеющим юрисдикцию над районом, в котором проводятся операции. Условия использования определяют ответственность и предусматривают разделение между участвующими самолетами.
- Средства УВД не вызывают и не отклоняют MARSA. Их единственная ответственность в отношении использования MARSA заключается в обеспечении разделения между военными самолетами, участвующими в операциях MARSA, и другими не участвующими самолетами ППП.
- Министерство обороны должно гарантировать, что военные пилоты, запрашивающие специальное использование воздушного пространства / ATCAA, согласовали свои действия с агентством по планированию, получили разрешение на въезд и знакомы с соответствующими процедурами MARSA. УВД не несет ответственности за определение того, каким военным самолетам разрешен вход в воздушное пространство специального назначения / ATCAA.
СПРАВКА-
Приказ FAA JO 7110.65, параграфы 9-2-13, Дозаправка в военных целях.
- ВОЕННЫЕ ПРОЦЕДУРЫ
Военные процедуры в виде дополнений, изменений и исключений из основной процедуры FAA предписываются здесь, когда общая процедура не была достигнута или для выполнения конкретного требования. Их должны применять:
- Средства УВД этой военной службы.
ПРИМЕР
- Объект ВВС, обслуживающий базу ВВС, будет применять процедуры ВВС США ко всем перевозкам независимо от класса.
- Средство военно-морского флота, обслуживающее военно-морскую авиабазу, будет применять процедуры USN ко всем перевозкам независимо от класса.
- Средства УВД, независимо от их головной организации (FAA, USAF, USN, USA), обслуживают исключительно назначенный военный аэропорт.Это обозначение определяет, какие военные процедуры должны применяться.
ПРИМЕР
- Средство FAA поддерживает исключительно базу ВВС США; Процедуры USAF применяются ко всему трафику на этой базе.
- Средство FAA обеспечивает службу управления заходом на посадку для военно-морской авиабазы, а также поддерживает гражданский аэропорт; Основные процедуры FAA применяются в обоих местах службой FAA.
- Средство ВВС США поддерживает базу ВВС США и обеспечивает службу управления приближением к гражданскому аэропорту-спутнику; Процедуры ВВС США применяются в обоих местах на объекте ВВС США.
СПРАВКА-
Приказ FAA JO 7110.65, параграфы 1-2-5, аннотации.
- Другие средства УВД, если это указано в письме-соглашении.
ПРИМЕР
Подразделение USAF использует гражданский аэропорт, поддерживаемый средством FAA — процедуры USAF будут применяться, как указано в письме-соглашении между подразделением и средством FAA, к самолету подразделения USAF. Базовые процедуры FAA будут применяться ко всем остальным воздушным судам.
- ФОРМАЦИОННЫЕ РЕЙСЫ
Управляйте групповыми полетами как единым самолетом. Ответственность за разделение между воздушными судами в составе группы возлагается на командира полета и пилотов других воздушных судов в полете. Это включает в себя переходные периоды, когда воздушные суда в строю маневрируют, чтобы достичь отделения друг от друга, чтобы обеспечить индивидуальное управление во время соединения и отрыва.
СПРАВКА-
Срок действия P / CG — рейс
для построения
Приказ FAA JO 7610.4, Глава 12, Раздел 11. Строительный рейс
Приложение 2 ИКАО, 3.1.8 Групповые полеты
- Поддержка группового полета двух самолетов в следующих случаях:
- Запрошено любым участвующим пилотом.
- Все участвующие пилоты согласны.
- Любой из участвующих пилотов сообщает о других в поле зрения.
ПРИМЕР
«ROOK01 имеет EAGLE03 в поле зрения, запросите соединение формирования с EAGLE03 на эшелоне полета два ноль ноль.EAGLE03 будет лидером ».
«EAGLE03 подтверждает запрос на присоединение к рейсу с ROOK01».
Если утвердительно:
«ROOK01 набирает высоту и поддерживает эшелон полета два ноль ноль. Сообщите (сообщите), когда формирование соединения будет завершено ».
- Если несколько одиночных воздушных судов запрашивают соединение, несколько формирований объединяются как одно или воздушные суда присоединяются к установленному строю, получите подтверждение требуемых элементов, перечисленных в подпункте 2-1-13a, от ведущего воздушного судна.
СПРАВКА-
Срок действия P / CG — Формирование полета
- После присоединения, присвоение кода радиобуя ВС будет определяться типом формирования.
- Для стандартного строя только воздушное судно, ведущее движение, будет издавать звуковой сигнал присвоенного УВД кода радиомаяка. Убедитесь, что все остальные самолеты находятся в режиме ожидания.
- При нестандартном строю каждое воздушное судно должно подавать сигнал радиомаяка, присвоенный УВД. Дискреционные полномочия диспетчера позволяют самолету в нестандартном строю подавать сигнал готовности, если это выгодно в эксплуатации.
СПРАВКА-
Приказ FAA JO 7610.4, параграф 12-11-6, Нестандартная тактика построения, подпункт b3.
ПРИМЕР —
«N123JP squawk standby».
Или
«N123SP имеет резервный сигнал N123JP».
- Когда запрашивается разделение строения, издайте инструкции по управлению и / или разрешения, которые приведут к утвержденному эшелонированию через опережение или непосредственно к запрашивающему воздушному судну в строю.
ПРИМЕР
«N5871S запрашивает прерывание полета с N731K. N731K меняет пункт назначения на PHL ».
«N731K крикнет 5432, поверните направо, летите по курсу ноль-семь-ноль.
«Центр, БАМА21. BAMA23 запрашивает RTB ».
«У BAMA21 есть BAMA23 визг 5544, снижение и поддержание эшелона полета один-девять-ноль и переход на мою частоту».
«Центр, BAMA21. BAMA23 запрашивает RTB ».
“BAMA23 squawk 5544. BAMA23 Radar contact (position if required).Получено в SSC напрямую. Снижение и поддержание эшелона полета один-девять-ноль ».
СПРАВКА-
Приказ FAA JO 7110.65, параграфы 5-5-8, Дополнительное эшелонирование для групповых полетов.
P / CG Term Formation Flight.
- Полеты военных и гражданских формирований в воздушном пространстве RVSM.
- Используйте стандарты эшелонирования с RVSM для группового полета, который включает все воздушные суда, одобренные к RVSM.
- Используйте стандарты эшелонирования без RVSM для группового полета выше эшелона полета 290, который не включает все воздушные суда, утвержденные к полетам с RVSM.
- Если воздушное судно запрашивает формирование группового полета на эшелон полета 290 или выше, диспетчер, который выдает разрешение на создание группового полета, несет ответственность за обеспечение того, чтобы для ведущего воздушного судна был введен правильный суффикс оборудования.
- Если рейс вылетает строем и запрашивает эшелон полета 290 или выше, первый центральный сектор должен гарантировать, что введен правильный суффикс оборудования.
- Если групповой полет ниже эшелона полета 290 и позже запрашивает эшелон полета 290 или выше, диспетчер, получающий запрос высоты RVSM, должен убедиться, что введен правильный суффикс оборудования.
- После разбивки группового полета диспетчер, инициирующий разбиение, должен обеспечить, чтобы всем самолетам или рейсам был присвоен соответствующий индекс оборудования.
- КООРДИНАТНОЕ ИСПОЛЬЗОВАНИЕ ВОЗДУШНОГО ПРОСТРАНСТВА
- Прежде чем разрешить воздушному судну, находящемуся под вашим управлением, войти в зону юрисдикции другого диспетчера, убедитесь, что была достигнута необходимая координация.
- Перед тем, как дать команду управления непосредственно пилоту, который изменит курс, маршрут, скорость или высоту самолета, вы должны убедиться, что была завершена координация со всеми диспетчерами, чья территория юрисдикции затронута этими инструкциями, если иное не указано в письме. соглашения или директивы по объекту.Если ваша инструкция по управлению будет передана пилоту через источник, отличный от другого диспетчера радара (FSS, New York Radio, San Francisco Radio, другой пилот и т. Д.), Вы все равно несете ответственность за обеспечение выполнения всей необходимой координации.
ПРИМЕЧАНИЕ-
- Хорошей эксплуатационной практикой для диспетчеров является подтверждение того, что требуемая координация была / будет осуществлена, особенно в необычных обстоятельствах, таких как недавно измененные конфигурации секторов, изменения воздушного пространства, изменения маршрута и т. Д.
- Обеспечение того, чтобы вся необходимая координация была завершена, не обязательно означает, что диспетчер, выдающий команду управления непосредственно пилоту, должен выполнить действие координации.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-1-15, Передача управления.
Приказ FAA JO 7110.65, параграфы 5-5-10, Прилегающее воздушное пространство.
Приказ FAA JO 7110.65, параграф 5-4-5, Передача обслуживания контроллера.
Приказ FAA JO 7110.65, параграф 5-4-6, Передача обслуживания приемника.
- ПЕРЕДАЧА УПРАВЛЕНИЯ
- Передайте управление воздушным судном при соблюдении следующих условий:
- В предписанном или согласованном месте, времени, контрольной точке или высоте; или,
- В то время, когда передача обслуживания радара и изменение частоты к принимающему контроллеру были завершены и когда это разрешено директивой по объекту или письмом-соглашением, в котором указываются тип и степень передаваемого управления.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-1-14, Координационное использование воздушного пространства.
Приказ FAA JO 7110.65, параграф 5-4-5, Передача обслуживания контроллера.
Приказ FAA JO 7110.65, параграф 5-4-6, Передача обслуживания приемника.
- Передайте управление воздушным судном только после устранения любого потенциального конфликта с другим воздушным судном, в отношении которого вы несете ответственность за разделение.
- Возьмите на себя управление воздушным судном только после того, как он окажется в вашей зоне юрисдикции, если это специально не согласовано или не указано в письме-соглашении или директиве по объекту.
- ПОВЕРХНОСТИ
- Координируйте действия с соответствующей диспетчерской вышкой для неприбытия на отдельном воздушном судне до выдачи разрешения, которое потребовало бы полета в пределах площади поверхности, за которую вышка несет ответственность, если иное не указано в письме-соглашении.
СПРАВКА-
Приказ FAA JO 7210.3, параграф 4-3-1, Соглашения.
14 CFR, раздел 91.127, Полеты в аэропорту или в его окрестностях в воздушном пространстве класса E.
P / CG Term — Площадь поверхности.
- Координируйте действия с соответствующей диспетчерской вышкой для получения разрешения на транзит, когда вы предоставляете консультативную услугу по радиолокационному движению воздушного судна, которое войдет в воздушное пространство другого объекта.
ПРИМЕЧАНИЕ-
Предполагается, что пилот не получит собственное разрешение через каждую зону при контакте с радиолокационной станцией.
- При необходимости передайте связь на соответствующий объект до начала работы на территории, за которую башня несет ответственность.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-1-17, Радиосвязь.
Приказ FAA JO 7110.65, параграф 3-1-11, Ограничения площади поверхности.
Приказ FAA JO 7110.65, параграф 7-6-1, приложение.
14 CFR, раздел 91.129, Полеты в воздушном пространстве класса D.
- РАДИОСВЯЗЬ
- Передайте радиосвязь до того, как воздушное судно войдет в зону юрисдикции принимающего диспетчера, если иное не согласовано или не указано в письме-соглашении или директиве по установке.
- Передайте радиосвязь, указав следующее:
ПРИМЕЧАНИЕ-
Процедуры передачи радиосвязи могут быть указаны в письме-соглашении или содержаться в описании маршрута MTR, опубликованном в документе DOD Planning AP / 1B (AP / 3).
- Название объекта или название места и функция терминала, с которой необходимо связаться. ТЕРМИНАЛ : Не указывайте имя местоположения при передаче сообщений другому контроллеру в пределах вашего объекта или, когда башня и TRACON используют одно и то же имя (например, Phoenix Tower и Phoenix TRACON).
ИСКЛЮЧЕНИЕ. Диспетчеры должны указать название средства при указании воздушному судну изменить частоту для наведения на конечный этап захода на посадку. - Частота использования, за исключением следующего:
- Частота ФСС.
- Частота отправлений, если она ранее была указана или опубликована в таблице SID для выпущенной процедуры.
- ТЕРМИНАЛ:
- Наземная или местная контрольная частота, если, по вашему мнению, пилот знает, какая частота используется.
- Цифры перед десятичной точкой, если частота наземного управления находится в полосе пропускания 121 МГц.
ПРИМЕР
«Контактная башня».
«Контактная площадка».
«Контактная точка семь».
«Контактная площадка, один, два, ноль, восьмая точка».
«Свяжитесь с радиостанцией Хантингтона».
«Связаться с отъездом».
«Свяжитесь с центром Лос-Анджелеса, раз, два, три и четыре пункта».
- Время, местоположение, высота или, в частности, когда обращаться в учреждение.Вы можете опустить это, если ожидается соответствие при получении.
ПРИМЕЧАНИЕ-
Пункт 5-3-1 AIM, ARTCC Communications, информирует пилотов о том, что они должны вести наблюдение на частоте передающего диспетчера до указанного времени, контрольной точки или высоты.
ФРАЗЕОЛОГИЯ —
КОНТАКТ (название объекта или название места и функция терминала), (частота).
При необходимости
AT (время, точка или высота).
- Диспетчеры должны в разумные сроки предпринять соответствующие действия для установления / восстановления связи со всеми воздушными судами, для которых ожидается / требуется передача связи или первоначальный контакт с его / ее сектором.
ПРИМЕЧАНИЕ-
Для целей этого параграфа разумным периодом времени считается 5 минут с того момента, когда самолет входит в зону действия диспетчера или находится в зоне действия радиосвязи / связи.Связь включает двустороннюю радиосвязь VHF или UHF, канал передачи данных или высокочастотное (HF) радио через утвержденного стороннего поставщика, такого как New York Radio или San Francisco Radio.
- Средства ERAM, начиная с первоначального звукового контакта с самолетом, должны использовать индикатор голосовой связи, чтобы отражать текущий статус голосовой связи.
- В ситуациях, когда будет получено операционное преимущество, и после согласования с принимающим диспетчером вы можете дать указание воздушному судну на земле контролировать частоту принимающего диспетчера.
ПРИМЕР
«Мониторская башня».
«Монитор земли».
«Наблюдать за седьмой точкой заземления».
«Monitor Ground, One Two Zero Point Eight».
- В ситуациях, когда сектор имеет несколько частот или когда секторы объединяются с использованием нескольких частот, и воздушное судно остается под вашей юрисдикцией, передайте радиосвязь, указав следующее:
ФРАЗЕОЛОГИЯ —
(Идентификация) ИЗМЕНЕНИЕ МОЕЙ ЧАСТОТЫ (частота состояния).
ПРИМЕР —
«Юнайтед два двадцать два меняет мою частоту один два три целых четыре десятых».
СПРАВКА-
AIM, параграфы 4-2-3, Контактные процедуры.
- Избегайте изменения частоты вертолетов, которые, как известно, являются однопилотными, во время руления по воздуху, зависания или полета на малых высотах. По возможности передавайте необходимые команды управления до тех пор, пока пилот не сможет изменить частоту.
ПРИМЕЧАНИЕ-
Большинство легких вертолетов управляется одним пилотом и требует постоянного использования рук и ног для поддержания контроля.Хотя устройства трения управления полетом помогают пилоту, изменение частоты у земли может привести к непреднамеренному контакту с землей и, как следствие, потере управления. Ожидается, что пилоты сообщат органу УВД о своем статусе одного пилота, если не смогут выполнить изменение частоты.
СПРАВКА-
AIM, параграфы 4-3-14, Коммуникации.
- В ситуациях, когда диспетчер не хочет, чтобы пилот изменял частоту, но пилот ожидает или может захотеть изменения частоты, используйте следующую фразеологию.
ФРАЗЕОЛОГИЯ —
ОСТАВАЙТЕСЬ НА ЭТОЙ ЧАСТОТЕ.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 4-7-1, Информация о разрешении.
Приказ FAA JO 7110.65, параграф 5-12-9, Передача связи.
- ОПЕРАЦИОННЫЕ ЗАПРОСЫ
Ответьте на запрос другого диспетчера, пилота или оператора транспортного средства одним из следующих устных средств:
- Переформулируйте запрос полностью или в сокращенном виде со словом «УТВЕРЖДЕНО.Фраза «УТВЕРЖДЕНО ПО ЗАПРОСУ» может быть заменено вместо длительного повторного чтения.
ФРАЗЕОЛОГИЯ —
(Запрошенная операция) УТВЕРЖДЕНО.
или
УТВЕРЖДЕНО ПО ЗАПРОСУ.
- Государственные ограничения, за которыми следует слово «УТВЕРЖДЕНО».
ФРАЗЕОЛОГИЯ —
(Ограничение и / или дополнительные инструкции, запрошенная операция) УТВЕРЖДЕНО.
- Назовите слово «НЕВОЗМОЖНО» и, если позволит время, причину.
ФРАЗЕОЛОГИЯ —
UNABLE (запрошенная операция).
и при необходимости
(причина и / или дополнительные инструкции.)
- Сформулируйте слова «ОЖИДАНИЕ».
ПРИМЕЧАНИЕ-
«STAND BY» не является одобрением или отказом. Контроллер подтверждает запрос и ответит позже.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-1-21, Информация о дорожном движении.
Приказ FAA JO 7110.65, параграф 4-2-5, Поправки к маршруту или высоте.
Приказ FAA JO 7110.65, параграфы 7-9-3, Методы.
- ТУРБУЛЕНТНОСТЬ ПОСЛЕДОВАНИЯ
- Применяйте процедуры турбулентности в спутном следе к воздушному судну, летящему за другим воздушным судном, когда требуется разделение турбулентности в спутном следе.
ПРИМЕЧАНИЕ-
Пункты 5-5-4, минимумы, подпункты g и h определяют требуемые интервалы турбулентности радиолокационного следа. Временное эшелонирование содержится в параграфе 3-9-6, Разделение на одну и ту же ВПП, параграфе 3-9-7, Эшелонирование с турбулентностью в спутной струе для вылетов на перекрестках, параграфе 3-9-8, Эшелонирование на пересекающихся ВПП, параграфе 3-9-9, Эксплуатация непересекающихся сходящихся ВПП, параграф 3-10-3, Разделение на одинаковые ВПП, параграф 3-10-4, Разделение пересекающихся ВПП, параграф 6-1-4, Работа в соседнем аэропорту, параграф 6-1-5, Минимумы прибытия и параграф 6-7-5, минимальный интервал.
- Минимумы эшелонирования должны продолжаться до приземления для всех воздушных судов по ППП, не выполняющих визуальный заход на посадку и не поддерживающих визуальное эшелонирование.
СПРАВКА-
Приказ FAA JO 7110.65, параграфы 5-9-5, Ответственность за эшелонирование при заходе на посадку.
- ПРЕДУПРЕЖДЕНИЯ ПО ТУРБУЛЕНТНОСТИ БУДИЛЬНИКА
- Выпустить предупредительные сообщения о турбулентности в следе, включая положение, высоту, если она известна, и направление полета для воздушного судна, выполняющего полет позади воздушного судна, для которого требуется разделение турбулентности в следе, когда:
СПРАВКА-
AC 90-23, Турбулентность в спутной струе самолета, ответственность пилотов, пункт 11.
Приказ FAA JO 7110.65, параграф 5-5-4, минимум, подпункт g.
- ТЕРМИНАЛ. Самолеты по ПВП, не управляемые радиолокатором, находятся за более крупным самолетом.
- Самолеты IFR допускают визуальный заход на посадку или визуальное эшелонирование.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 7-4-1, Визуальный заход на посадку.
- ТЕРМИНАЛ. Прибывающих самолетов по ПВП, которые ранее подвергались векторному наведению радиолокационных станций, и управление вектором прекращено.
- Предоставьте предупредительную информацию любому воздушному судну, если, по вашему мнению, турбулентность в спутном следе может оказать на него неблагоприятное воздействие. Если известно, что трафик является самолетом Super, включите в описание слово Super . Если трафик известен как тяжелый самолет , включите в описание слово Heavy .
ПРИМЕЧАНИЕ-
Турбулентность в спутном следе возникает, когда самолет создает подъемную силу. Поскольку местоположение турбулентности в следе определить сложно, диспетчер не несет ответственности за прогнозирование ее существования или воздействия.Самолет, пролетающий по траектории сверх / тяжелого самолета, может иметь повышенный шанс столкновения в спутной струе.
СПРАВКА-
AC 90-23, Турбулентность в спутном следе самолета.
P / CG Term — классы самолетов.
Термин P / CG — турбулентность в следе.
ФРАЗЕОЛОГИЯ —
ВНИМАНИЕ WAKE TURBULENCE (дорожная информация).
СПРАВКА-
Приказ FAA JO 7110.65, параграф 7-2-1, Визуальное эшелонирование.
- КОНСУЛЬТАТОРЫ ДВИЖЕНИЯ
Если воздушное судно не выполняет полеты в воздушном пространстве класса A или пилот не запрашивает пропуск, выпускайте информационные сообщения для всех воздушных судов (по ППП или ПВП) на вашей частоте, когда, по вашему мнению, их близость может уменьшиться до значений, меньших применимых минимумов эшелонирования.В тех случаях, когда минимумы эшелонирования не применяются, например, для воздушных судов по ПВП за пределами воздушного пространства класса B / класса C или TRSA, выпускайте информационные сообщения для этих воздушных судов на вашей частоте, если, по вашему мнению, их близость требует этого. Оказывайте эту услугу следующим образом:
- Для радиолокационного опознавания самолета:
- Азимут с самолета в 12-часовом формате, или
- Когда быстро маневрирующий самолет препятствует точной выдаче трафика, как в пункте 1 выше, укажите направление от местоположения самолета в терминах восьми основных точек компаса (N, NE, E, SE, S, SW, W и NW).Этот метод должен быть прекращен по запросу пилота.
- Расстояние от самолета в милях.
- Направление движения и / или относительное движение трафика.
ПРИМЕЧАНИЕ-
Относительное движение включает в себя закрытие, сближение, параллельное в одном направлении, противоположное направление, расхождение, обгон, пересечение слева направо, пересечение справа налево.
- Если известно, тип самолета и высота.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-4-21, Описание типов воздушных судов.
ФРАЗЕОЛОГИЯ —
ДВИЖЕНИЕ, (номер) ЧАСЫ,
или, если необходимо,
(направление) (число) МИЛИ, (направление) — ОГРАНИЧЕНИЕ и / или (относительное движение),
и если известно,
(тип самолета и высота).
или
При необходимости,
(тип самолета и относительное положение), (количество футов) НОГИ НАД / НИЖЕ ВАС.
Если высота неизвестна,
НЕИЗВЕСТНАЯ ВЫСОТА.
ПРИМЕР —
«Трафик, одиннадцать часов, одна ноль миль, на юг, сходящийся, Боинг семь, двадцать семь, одна семь тысяч».
«Движение, двенадцать часов один, пять миль, в противоположном направлении, высота неизвестна».
«Движение, десять часов, одна, две мили, на юго-восток, на тысячу футов ниже вас».
- По запросу пилота выдавайте радиолокационные векторы, чтобы помочь избежать движения, при условии, что самолет, на который нужно направить вектор, находится в пределах вашей юрисдикции или была проведена координация с сектором / объектом, в районе которого выполняется воздушное судно.
- Если вы не можете предоставить векторную услугу, сообщите об этом пилоту.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-1-18, рабочие запросы.
- Сообщите пилоту следующее, если сообщение о трафике отсутствует в поле зрения:
- Трафик не имеет значения.
- Трафик больше не отображается на радаре.
ФРАЗЕОЛОГИЯ —
ДВИЖЕНИЕ НЕТ ФАКТОРА / БОЛЬШЕ НЕ НАБЛЮДАЕТСЯ,
или
(номер) ЧАСЫ ДОРОЖНОГО ДВИЖЕНИЯ NO FACTOR / NO
ДАЛЕЕ НАБЛЮДАЕМСЯ,
или
(направление) ДВИЖЕНИЕ БЕЗ ФАКТОРА / НЕТ ДАЛЬШЕ
НАБЛЮДАЕМЫЙ.
- Для самолетов, не обнаруженных радаром:
- Расстояние и направление от точки.
- Направление движения.
- Если известно, тип самолета и высота.
- ETA над контрольной точкой приближается воздушное судно, если возможно.
ФРАЗЕОЛОГИЯ —
ДВИЖЕНИЕ, (число) МИЛИ / МИНУТЫ (направление) ОТ (аэропорт или контрольная точка), (направление) -BOUND,
и если известно,
(тип ВС и высота),
РАСЧЕТНАЯ (исправление) (время),
или
ДВИЖЕНИЕ, МНОГОЧИСЛЕННЫЕ САМОЛЕТЫ В ОБЛАСТИ (местонахождение).
Если высота неизвестна,
НЕИЗВЕСТНАЯ ВЫСОТА.
ПРИМЕР —
«Движение, одна ноль миль к востоку от Форсайта V-O-R, Southbound, M-D Eighty, спускается до одной шеститысячной».
«Движение, сообщенное в одной нулевой милях к западу от В-О-Р Дауни, в северном направлении, Апачи, высота неизвестна, по оценкам Джолиет В-О-Р, один три один пять».
— Трафик, восемь минут к западу от Чикаго-Хайтс V-O-R, в западном направлении, Муни, восемь тысяч, по оценкам Джолиет, V-O-R, два ноль три пять.”
«Движение, многочисленные самолеты, близость к аэропорту Делия».
- Для самолета, отображающего режим C, без идентификации радара, выдается индикация высоты.
ПРИМЕР
«Движение, час, шесть миль, на восток, высота показывает шесть тысяч пятьсот».
СПРАВКА-
Приказ FAA JO 7110.65, параграф 3-1-6, Информация о движении.
Приказ FAA JO 7110.65, параграф 7-2-1, Визуальное эшелонирование.
Приказ FAA JO 7110.65, параграфы 7-6-10, Информация о вылете по ПВП.
- ИНФОРМАЦИЯ О ДЕЯТЕЛЬНОСТИ БЕСПРОВОДНОЙ АВИАЦИОННОЙ СИСТЕМЫ (БАС).
- Выдавать консультативную информацию о БПЛА для известных действий БПЛА, когда, по вашему мнению, их близость требует этого. Если известно, укажите местоположение, расстояние, курс, тип беспилотного летательного аппарата (UA) и высоту.
ПРИМЕР
«Действия U-A-S, 12 часов, 1 миля, на юг, квадрокоптер, 400 футов и ниже».
«Работа беспилотных авиационных систем, в 2 милях к востоку от аэропорта Брендивайн, в 300 футах и ниже.”
- Выдавайте консультативную информацию БПЛА о действиях, о которых сообщил пилот или наблюдал с вышки, если, по вашему мнению, их близость требует этого. Если известно, укажите положение, высоту, курс и тип. Продолжайте давать рекомендации потенциально пострадавшим воздушным судам в течение как минимум 15 минут после последнего отчета.
ПРИМЕР
«Сообщается о деятельности U-A-S, 12 часов, 1 миля, сообщается о высоте одна тысяча двести».
«Наблюдалась активность беспилотных летательных аппаратов в 1 миле к востоку от аэропорта Трентон, высота неизвестна.”
- ИНФОРМАЦИЯ О ДЕЯТЕЛЬНОСТИ ПТИЦЫ
- Выпускать консультативную информацию о деятельности птиц, сообщаемой пилотом, с вышки или с помощью радиолокатора и подтвержденной пилотом. Укажите местоположение, вид или размер птиц, если они известны, курс полета и высоту. Делайте это в течение как минимум 15 минут после получения такой информации от пилотов или с соседних объектов, если только визуальное наблюдение или последующие отчеты не показывают, что активность больше не является фактором.
ПРИМЕР
«Стая гусей, час, семь миль, на север, последний раз сообщили о четырех тысячах.”
«Стая мелких птиц, направляющаяся на юг вдоль реки Могавк, в последний раз насчитывала три тысячи».
«Многочисленные стаи уток, окрестности озера Виннебаго, высота неизвестна».
- Передавайте информацию о деятельности птиц соседним объектам и службам безопасности полетов всякий раз, когда она появляется, когда это станет фактором в их районах.
- ПЕРЕДАЧА ДОЛЖНОСТИ ОТВЕТСТВЕННОСТИ
Передача ответственности за должность должна осуществляться в соответствии со «Стандартной операционной практикой (СОП) передачи ответственности за должность» и соответствующими директивами учреждения каждый раз, когда операционная ответственность за должность передается от одного специалиста к другому.
- ПРОВЕРКА КОЛЕС ВНИЗ
США / USN
Напомните самолету проверять опускание колес при каждом заходе на посадку, если пилот ранее не сообщал об опускании колес для этого захода на посадку.
ПРИМЕЧАНИЕ-
Цель состоит исключительно в том, чтобы напомнить пилоту о необходимости опустить колеса, а не возлагать ответственность на диспетчера.
- Башня должна выдать проверку опускания колес в соответствующем месте рисунка.
ФРАЗЕОЛОГИЯ —
ПРОВЕРЬТЕ КОЛЕСА ВНИЗ.
- Управление подходом / прибытием, GCA должно выполнить проверку опущенных колес следующим образом:
- К воздушным судам, выполняющим заходы на посадку по ASR, PAR или с радиолокационным контролем, до начала снижения на конечном этапе захода на посадку.
- К воздушным судам, выполняющим заходы на посадку по приборам и остающимся на частоте радиолокационного средства, до того, как воздушное судно пройдет внешний маркер / контрольную точку конечного этапа захода на посадку.
ФРАЗЕОЛОГИЯ —
КОЛЕСА ДОЛЖНЫ БЫТЬ ВНИЗЫ.
- КОНТРОЛЬНОЕ УВЕДОМЛЕНИЕ
Убедитесь, что супервизор / ответственный контролер (CIC) осведомлен об условиях, которые влияют на работу сектора / должности, включая, помимо прочего, следующее:
- Погода.
- Состояние оборудования.
- Возможная перегрузка сектора.
- Аварийные ситуации.
- Специальные рейсы / операции.
- Возможная подозрительная деятельность воздушного судна / пилота, как указано в Приказе FAA JO 7610.4, параграф 7-3-1.
- УВЕДОМЛЕНИЕ ОБ ОТКЛОНЕНИИ ПИЛОТА
Когда выясняется, что действия пилота составляют отклонение пилота, уведомить пилота, если рабочая нагрузка позволяет.
ФРАЗЕОЛОГИЯ —
(Идентификация) ВОЗМОЖНОЕ ОТКЛОНЕНИЕ ПИЛОТА СОВЕТУЙТЕ ВАМ СВЯЗАТЬСЯ (объект) по телефону (номер телефона).
СПРАВКА-
Приказ FAA JO 8020.16, Уведомление об авиационных происшествиях и авиационных происшествиях, расследование и отчетность, глава 11, параграф 3, Обязанности органов воздушного движения.
- СОВЕТЫ ПО РАЗРЕШЕНИЮ TCAS
- Когда воздушное судно, находящееся под вашей юрисдикцией, сообщает вам, что оно отвечает на рекомендации TCAS по разрешению проблем (RA), не давайте команд управления, которые противоречат процедуре RA, которую член экипажа сообщил вам о том, что они выполняются.Предоставление предупреждений безопасности относительно местности или препятствий и рекомендаций по движению для воздушного судна, реагирующего на RA, и всех других воздушных судов, находящихся под вашей юрисдикцией, в зависимости от обстоятельств.
- Если другие воздушные суда не сообщают, что они также реагируют на RA TCAS, не предполагайте, что другие воздушные суда в непосредственной близости от отвечающего воздушного судна участвуют в маневре RA или осведомлены о предполагаемых маневрах отвечающего воздушного судна. Продолжайте предоставлять инструкции по управлению, предупреждения о безопасности и рекомендации по управлению воздушным движением в зависимости от ситуации.
ПРИМЕЧАНИЕ-
Когда пилот уведомлен о RA, диспетчеру не запрещается выпускать информационные сообщения и предупреждения о безопасности движения.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 2-1-6, Предупреждение о безопасности.
Приказ FAA JO 7110.65, параграф 2-1-21, Информация о дорожном движении.
- После того как отвечающее воздушное судно начало маневр в ответ на RA, диспетчер не несет ответственности за обеспечение утвержденного эшелонирования между воздушным судном, которое отвечает на RA, и любыми другими воздушными судами, воздушным пространством, местностью или препятствиями.Ответственность за утвержденное разделение возобновляется при выполнении одного из следующих условий:
- Отвечающий самолет вернулся на заданную высоту, или
- Член экипажа сообщает вам, что маневр TCAS завершен, и вы наблюдаете, что утвержденное эшелонирование восстановлено, или
- Отвечающий самолет выполнил альтернативное разрешение, и вы видите, что утвержденное эшелонирование восстановлено.
ПРИМЕЧАНИЕ-
- AC 120-55 «Эксплуатационное одобрение авиаперевозчика и использование TCAS II» предлагает пилотам использовать следующую фразеологию для уведомления диспетчеров во время событий TCAS. Если TCAS RA может повлиять на разрешение УВД, проинформируйте УВД в начале маневра или как только позволяет рабочая нагрузка.
ПРИМЕР
- «Нью-Йорк Центр, Юнайтед 321, TCAS RA».
- После разрешения RA летный экипаж должен сообщить органу УВД, что они возвращаются к ранее назначенному разрешению или последующему измененному разрешению.
ПРИМЕЧАНИЕ-
ПРИМЕР
- «Нью-Йорк Центр, Юнайтед 321, вдали от конфликта, возвращается на заданную высоту».
- ОПЕРАЦИИ RVSM
Обязанности контролера должны включать, но не ограничиваться следующим:
- Самолеты без RVSM, выполняющие полеты в воздушном пространстве с RVSM.
- Убедитесь, что воздушные суда без RVSM не допускаются в воздушное пространство с RVSM, если они не соответствуют критериям исключенных воздушных судов и предварительно не одобрены руководителем операций / CIC.Исключение составляют следующие воздушные суда: DOD, сертифицированные DOD самолеты, эксплуатируемые НАСА (только самолеты T38, F15, F18, WB57, S3 и U2), MEDEVAC, самолеты изготовителя, выполняемые для разработки / сертификации, и самолеты иностранных государств. Эти исключения допускаются в зависимости от рабочей нагрузки или разрешения трафика.
ПРИМЕЧАНИЕ-
Руководитель операций / CIC отвечает за приемку системы воздушного судна без RVSM за пределами первоначальной межсекторной координации после запроса пилота на доступ в воздушное пространство.Обязанности руководителя производства / CIC определены в Приказе FAA JO 7210.3, Глава 6, Раздел 9, Сокращенный минимум вертикального эшелонирования (RVSM).
- Обеспечение межсекторной координации для всех полетов воздушных судов без RVSM в воздушном пространстве с RVSM.
- Сообщите операционному супервайзеру / CIC, если для полета без RVSM отказано в разрешении на въезд в воздушное пространство с RVSM или если он удален из воздушного пространства с RVSM.
- Воздушное судно без RVSM, переходящее в воздушное пространство с RVSM.
Убедитесь, что руководители операций / CIC уведомлены о том, что воздушные суда без RVSM пересекают воздушное пространство с RVSM. - Примените соответствующие стандарты эшелонирования и удалите все воздушные суда из воздушного пространства с RVSM, которые сообщают, что они не могут использовать RVSM из-за оборудования во время полета.
- Используйте «отрицательный RVSM» во всех устных сообщениях земля-земля с участием самолетов без RVSM, когда им разрешено выполнять полеты в воздушном пространстве с RVSM.
ПРИМЕР
«Обратите внимание на набор Baxter1 на эшелон полета 360, отрицательный RVSM.”
- В следующих ситуациях используйте соответствующую фразеологию:
- Запретить доступ в воздушное пространство с RVSM.
ФРАЗЕОЛОГИЯ —
«НЕПРАВИЛЬНЫЙ ДОПУСК В ВОЗДУШНОЕ ПРОСТРАНСТВО RVSM».
- Чтобы попросить пилота сообщить, когда он сможет возобновить RVSM.
ФРАЗЕОЛОГИЯ —
«ОТЧЕТ О ВОЗОБНОВЛЕНИИ RVSM».
- В случае изменения права воздушного судна на RVSM измените квалификатор RVSM («W») в строке оборудования ИКАО, чтобы правильно идентифицировать воздушное судно без RVSM на дисплее диспетчера.
ПРИМЕЧАНИЕ-
Изменение суффикса оборудования вместо изменения строки оборудования может привести к неправильным изменениям в других квалификаторах ИКАО.
СПРАВКА-
Пункт 5-1-9 AIM, Международный план полета (форма 7233-4 FAA) Полеты по ППП (для внутренних или международных рейсов).
AIM TBL 5-1-4 Квалификационные параметры бортового оборудования, навигационного оборудования и оборудования для захода на посадку.
- Орган УВД может разрешить воздушному судну оставаться в воздушном пространстве с RVSM с использованием сокращенных минимумов вертикального эшелонирования после потери ответчика или передачи данных о высоте в режиме C.
ПРИМЕЧАНИЕ-
В ситуации отсутствия транспондера возможности воздушного судна по удержанию высоты, необходимые для полета в воздушном пространстве с RVSM, должны оставаться в рабочем состоянии.
СПРАВКА-
Приказ FAA JO 7110.65, параграф 4-5-1, Минимумы вертикального эшелонирования.
Приказ FAA JO 7110.65, параграфы 2-3-8, суффикс бортового оборудования.
14 CFR Раздел 91.215 Транспондер УВД и оборудование для передачи данных о высоте и его использование.
Консультативный циркуляр AC 91-85B, Разрешение воздушных судов и эксплуатантов на выполнение полетов в воздушном пространстве с сокращенным минимумом вертикального эшелонирования (RVSM).
- СИСТЕМА ПРЕДУПРЕЖДЕНИЙ СИСТЕМЫ ПРЕДУПРЕЖДЕНИЯ О ПЕРИОДИЧНОСТИ (TAWS)
- Когда воздушное судно, находящееся под вашей юрисдикцией, сообщает вам, что оно реагирует на предупреждение TAWS (или другое бортовое предупреждение на малой высоте), не давайте команд управления, которые противоречат процедуре TAWS, которую член экипажа сообщил вам о выполнении. . Предоставление предупреждений безопасности относительно местности или препятствий и рекомендаций по движению для самолета, реагирующего на предупреждение TAWS, и для всех других самолетов, находящихся под вашей юрисдикцией, в зависимости от обстоятельств.
- После того как отвечающий самолет начал маневр в ответ на предупреждение TAWS, диспетчер не несет ответственности за обеспечение утвержденного эшелонирования между самолетом, который реагирует на предупреждение TAWS, и любыми другими самолетами, воздушным пространством, местностью или препятствиями. Ответственность за утвержденное разделение возобновляется при выполнении одного из следующих условий:
- Отвечающий самолет вернулся на заданную высоту, или
- Член экипажа сообщает вам, что маневр TAWS завершен, и вы наблюдаете, что утвержденное эшелонирование восстановлено, или
- Отвечающий самолет выполнил альтернативное разрешение, и вы видите, что утвержденное эшелонирование восстановлено.
- СОБЫТИЯ «СИНИЙ МОЛНИЙ»
Убедитесь, что инспектор / ответственный контролер (CIC) уведомлен о сообщениях о возможной торговле людьми. Их можно назвать событиями «Голубая молния».
Эти видео показывают чистый беспорядок на дорогах — или нет? | Города
Представьте себе альтернативный мир без правил дорожного движения, где вы приближаетесь к перекрестку, и нет обнадеживающего зеленого света, который поможет вам встать на путь. Вместо этого весь трафик свободен, ваши движения не контролируются, и все транспортные средства — независимо от количества колес или ног — должны взаимодействовать друг с другом инстинктивно.Утопическое безумие? Хаос, суматоха и улицы с пробками? Может быть нет.
В замедленной видеозаписи перекрестка без светофоров в столице Эфиопии Аддис-Абебе этот очевидный хаос запечатлен в действии.
Игрушечные машинки кружатся друг вокруг друга на оживленной трассе, а люди грациозно блуждают по перекрестку, не проезжая мимо светофоров. Кажется, все идет гладко. Очевидно, люди могут обойтись без указаний машины.Или они могут?
«То, что вы наблюдаете, далеко от хаоса», — говорит городской дизайнер Бен Гамильтон-Бейли. «В динамике этого пространства присутствует очень строгий порядок, который просто отличается от обычного контролируемого государством порядка светофора.
«Сигнал светофора думает для участников и контролирует этот процесс, в отличие от целого ряда социальных протоколов и принятых соглашений, которые применяются здесь — по сути, вы не столкнетесь ни с кем другим.
Это не какой-то либертарианский социальный эксперимент. Идея очистки дорог от светофоров, разметки, знаков остановки и заграждений внедряется в городах по всему миру и десятилетиями обсуждается в кругах городского дизайна.
То, что вам нужно, — это немного двусмысленности, неопределенности, и именно поэтому эти перекрестки работают.Бен Гамильтон-Бэйли
Эта концепция была впервые разработана голландским транспортным инженером Хансом Мондерманом, который использовал ее в своей работе в качестве руководителя службы безопасности дорожного движения во Фрисландии в 1980-х годах.«Совместное пространство» (фраза, придуманная Гамильтоном-Бейли) по существу означает, что если физический контроль движения будет удален, «участники дорожного движения сами решат это сами цивилизованно», — говорит профессор Джон Адамс из Университетского колледжа Лондона.
На улицах, где это уже было реализовано — от Германии до Японии и Израиля — вместо увеличения количества дорожно-транспортных происшествий, дорожной ярости, страха и негативных эмоций, связанных с потерей порядка, он фактически улучшил внешний вид дорог, коммуникабельность — а в некоторых случаях даже снижение количества ДТП.
Почти год назад в Амстердаме пытались выключить светофор и убрать защитные барьеры на печально известном перекрестке на Александерплейн. Вместо ожидаемого хаоса этот акт улучшил поток транспорта, и более половины участников дорожного движения заявили, что он улучшил перекресток.
«Обычные инженерные цели ясности и уверенности — не самое лучшее, когда вы пытаетесь справиться со сложностью [на улице]», — говорит Гамильтон-Бейли. «Что вам нужно, так это немного двусмысленности, неопределенности, и это то, что заставляет эти перекрестки работать.”
Берн, Швейцария
Берн, Швейцария — еще один европейский город, решивший избавиться от правил и механизмов. В результате, как показано в ролике выше, автомобили проезжают медленнее, пешеходы переходят дорогу со всех сторон, казалось бы, без замешательства, а мужчина бежит по дороге, даже не глядя. По словам Гамильтона-Бейли, конструкция дороги снижает скорость движения «до 12 миль в час … [что меняет] баланс между пешеходами и движением транспорта».
Градостроитель добавляет: «Проблема с отключенными сигналами заключается в том, что водителю больше не дают зеленый свет.А зеленый свет сообщает водителю, что у вас здесь приоритет — вы должны идти вперед и злиться, если бабушка идет впереди вас.
«Но в обычных обстоятельствах мы бы никогда так не злились». Вместо этого, говорит он, «вы гораздо более открыты для традиционных протоколов, чем мы, например, если бы проходили через здание».
Ханой, Вьетнам
Ханой, столица Вьетнама, особенно интересен, говорит Гамильтон-Бейли, из-за большого количества пешеходов и мопедов.
Участники дорожного движения, добавляет он, «должны очень внимательно относиться к другим транспортным средствам и людям, что делает сами видеоролики довольно увлекательными. Все, что вы должны делать как пешеход, — это просто ходить и ходить предсказуемо. И как только это произойдет, люди смогут предсказать вашу скорость ».
Но, как знает любой, кто пытался пересечься с одним из вьетнамских мопедов, «это требует определенной нервозности в первый раз».
Дели, Индия
В некоторых развивающихся странах, таких как Индия, вы видите то, что городские дизайнеры называют «естественным общим пространством» на дорогах.Вместо того, чтобы убрать их светофоры, в данном случае их просто никогда не устанавливали.
На этом видео Дели вы видите множество взаимодействий, некоторые из которых могут показаться забавными, — говорит Гамильтон-Бейли. «Инженеры могут назвать это конфликтом, но в этом и суть города. То, что вы видите, — это большое взаимодействие: люди кричат друг на друга и веселятся. Динамика человеческого взаимодействия, которая заменяет государственный контроль светофоров, вот что интересно в этом общем пространстве.
В то время как профессор Адамс из UCL является защитником дорог без сигнала и отвергает общепринятую точку зрения планировщиков дорожного движения, он также утверждает, что, как бы мы ни восхищались величественным потоком эфиопского перекрестка дорог, совместное пространство не везде подходит .
«В коротком ролике [Аддис-Абеба] никого не сбивают с ног, но в таких странах, где не так много машин на душу населения, практически везде используется общее пространство — и во всех них ужасающие показатели смертности на дорогах.”
По данным Всемирной организации здравоохранения, уровень смертности на дорогах на один автомобиль в Эфиопии почти в 1000 раз выше, чем в Великобритании (4984,3 на 100 000 автомобилей). В Индии — 130,1, во Вьетнаме — 55. В Великобритании — 5,1.
Это не отменяет аргументов в пользу отключения светофоров, утверждает Гамильтон-Бейли. В странах с более недавней историей автомобилизации «можно ожидать, что количество жертв будет довольно высоким», — говорит он. Фактически, по мере того, как количество автомобилей в странах растет, уровень смертности на один автомобиль резко падает — что Адамс связывает с идеей о том, что «становясь более опытными в управлении дорожным движением, мы узнаем, как лучше с ним справляться».
«С 1950 года в Великобритании уровень смертности на одно транспортное средство снизился более чем на 96%», — отмечает он. «Насколько заслуга инженеров, лучших тормозов, лучших шоссе и законодателей за законы о вождении в нетрезвом виде? Я вкладываю большую часть своих денег в культурный сдвиг ».
Подписывайтесь на Guardian Cities в Twitter и Facebook, чтобы присоединиться к обсуждению, и изучайте наш архив
Кто имеет преимущественное право, когда одна машина поворачивает налево?
Q: Две машины подъезжают к знакам остановки на противоположных сторонах улицы, где перекрестное движение не должно останавливаться.Одна машина собирается повернуть налево, другая ехать прямо. Автомобиль, поворачивающий налево, первым дошел до знака остановки. Кто имеет преимущественное право проезда? — Майк Л., Тамуотер
A: Эти вопросы о полосе отвода не дают нам спать по ночам.
Существует так много сценариев с таким количеством различных правил, что Вашингтонское руководство для водителей посвящает этой теме четыре полных страницы.
Вот второй абзац раздела о преимущественном праве в указанном руководстве:
«Закон гласит, что кто должен уступать дорогу, он никому не дает преимущественного права.Неспособность уступить дорогу — это ссылка № 1 в городских столкновениях. Вы должны сделать все возможное, чтобы не допустить удара пешехода, идущего пешком, в инвалидной коляске или другом транспортном средстве, независимо от обстоятельств ».
И обстоятельств очень много.
Встречали человека с собакой-поводырем или с белой тростью? У них есть «абсолютное право проезда».
На развязке? Вы должны уступить дорогу машинам, которые уже объезжают.
На остановке с четырьмя путями? Тот, кто первым доберется, идет первым. Если одновременно подъезжает несколько автомобилей, приоритет имеет автомобиль справа.
А как насчет вопроса Майка?
Вот что сказала по этой теме представитель полиции Такомы Лоретта Кул:
«При прочих равных условиях левый поворот должен уступать место человеку, идущему прямо», — сказал Кул. «Вы не ходите по очереди, когда оба останавливаются. Левый поворот уступает ».
Это, кажется, перекликается с Руководством по водителю, в котором частично говорится: «Водители, поворачивающие налево, должны уступать дорогу встречным транспортным средствам, пешеходам и велосипедистам.
Ага. Удачи тебе.
Приводите трезвый образ
Патруль штата Вашингтон сообщает нам здесь, в штаб-квартире вопросов и ответов о дорожном движении, что с сегодняшнего дня до 5 сентября солдаты будут искать пьяных водителей. направлена на то, чтобы побудить «всех ехать безопасно, особенно если алкоголь, лекарства, отпускаемые по рецепту или без рецепта, или другие наркотики могут вызывать нарушения».
По стране, выходные, посвященные Дню труда, являются одним из самых смертоносных периодов в году с точки зрения дорожно-транспортных происшествий в нетрезвом виде, сообщает Государственный патруль.
Кампания является частью Target Zero, которая стремится к 2030 году положить конец дорожно-транспортным происшествиям в Вашингтоне.
Мы желаем им всего наилучшего.
История изначально была опубликована 20 августа 2016 г. в 18:09.
Следите за нашими отчетами по самым популярным темам вопросов и ответов о трафике
Посмотреть все истории
Приоритеты использования гибких зон / бордюров в Сиэтле — Транспорт
По улицам Сиэтла автобусы, автомобили, трамваи, велосипеды и грузовики перемещают людей и товары.На тротуарах пешеходы могут двигаться, ждать своего автобуса и добираться туда, куда они хотят.
Между ними находится гибкое пространство, где люди находят свой автобус, припарковывают машину, вызывают такси, высаживают пассажира или делают доставку. Все чаще это пространство используется как место для общения или ведения бизнеса в парках и скверах. Итак, мы называем это пространство гибкой зоной, хотя многие называют это бордюром или парковочной полосой.
Многие люди и автомобили хотят использовать эти пространства, поэтому Комплексный план города устанавливает правила, устанавливающие приоритет использования гибких зон по функциям.
Примеры функций
| Функция | Определение | Примеры использования |
|---|---|---|
| Мобильность | Перемещение людей и товаров |
|
| Доступ для людей | Люди прибывают в пункт назначения или перемещаются между разными способами передвижения |
|
| Доступ для торговли | Товары и услуги достигают своих клиентов и рынки |
|
| Активация | Предлагает яркие социальные пространства |
|
| Озеленение | Улучшает эстетику и здоровье окружающей среды |
|
| Хранилище | Предназначен для хранения транспортных средств или оборудования |
|
Эти приоритеты установлены таким образом, чтобы улицы Сиэтла могли безопасно и эффективно соединять и перемещать людей и товары в места назначения, создавая при этом привлекательные пространства в полосе отчуждения.
Приоритет функций гибкой зоны определяется в зависимости от землепользования| Жилой | Коммерческий и смешанный | Промышленный | |
|---|---|---|---|
| 1 | Поддержка приоритетов модального плана | Поддержка приоритетов модального плана | Поддержка приоритетов модального плана |
| 2 | Доступ для людей | Доступ для торговли | Доступ для торговли |
| 3 | Доступ для торговли | Доступ для людей | Доступ для людей |
| 4 | Озеленение | Активация | Хранилище |
| 5 | Хранилище | Озеленение | Активация |
| 6 | Активация | Хранилище | Озеленение |
Самоорганизованный трафик с помощью правил приоритета у муравьев-листорезов
PLoS Comput Biol.2018 окт; 14 (10): e1006523.
, Концептуализация, Формальный анализ, Исследование, Методология, Программное обеспечение, Визуализация, Написание — первоначальный проект, Написание — просмотр и редактирование 1, 2, 3, * и, Концептуализация, Курирование данных, Формальный анализ, Исследование, Методология, Написание — первоначальный вариант, Написание — просмотр и редактирование 4Даниэль Стрёмбом
1 Математический факультет Упсальского университета, Упсала, Швеция
2 Департамент биологических наук, Университет Суонси, Суонси, Соединенное Королевство
3 Кафедра биологии, Колледж Лафайет, Истон, Пенсильвания, Соединенные Штаты Америки
Одри Дассютур
4 Центр исследований в области познания животных (CRCA), Центр интеграции биологии (CBI), Университет Тулузы, CNRS, UPS, Тулуза, Франция
Джессика К.Flack, редактор
1 Математический факультет Упсальского университета, Упсала, Швеция
2 Департамент биологических наук, Университет Суонси, Суонси, Соединенное Королевство
3 Кафедра биологии, Колледж Лафайет, Истон, Пенсильвания, Соединенные Штаты Америки
4 Центр исследований в области познания животных (CRCA), Центр интеграции биологии (CBI), Университет Тулузы, CNRS, UPS, Тулуза, Франция
Институт Санта-Фе, СОЕДИНЕННЫЕ ШТАТЫ
Авторы заявили об отсутствии конкурирующих интересов.
Поступила 04.06.2018; Принято 21 сентября 2018 г.
Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника ссылки на эту статью. другими статьями в PMC.- Дополнительные материалы
- S1 Table: Сводка эксперимента с узким следом и его результатов. Из [22] на основе 12 повторов.Тропа, соединяющая гнездо с источником пищи, имела ширину 0,5 см и длину 300 см. Поток муравьев, покидающих гнездо (исходящие муравьи), и поток, покидающий источник листьев (входящие муравьи), подсчитывали с интервалами в 1 минуту в течение 1 часа, а также измеряли долю груженых муравьев во входящем потоке. Было количественно определено формирование групп последовательных муравьев, движущихся в одном направлении в последовательности муравьев, наблюдаемых на тропе. На индивидуальном уровне измеряли скорость муравьев и исход лобовых столкновений между муравьями (правило приоритета).Были выделены четыре типа муравьев: исходящие муравьи (O), (входящие) порожние муравьи (U), (входящие) груженые муравьи (L) и порожние муравьи, следующие за груженым муравьем (U (L)). Был проанализирован результат лобового столкновения между вылетающими муравьями и гружеными муравьями (O vs L), исходящими муравьями и муравьями без нагрузки (O против U), а также муравьями без нагрузки и гружеными муравьями (U против L). Обычно после столкновения один муравей перемещается в сторону следа (СТОП), чтобы пропустить приближающегося муравья (ХОДЬБА). Была измерена потеря времени на столкновение, и она не различалась в зависимости от типа муравьев.Когда один муравей уступал место другому, он обычно уходил в сторону от тропы и позволял муравью пройти. Следующие муравьи могут извлечь выгоду из прохода ведущего муравья (муравья, которому уступили дорогу), прежде чем муравей, который уступил дорогу, вернется на вершину следа. Этот последний эффект соответствует кооперативному поведению муравьев, потому что последующие муравьи извлекают выгоду из прохождения ведущего муравья. Вероятность того, что муравей получит пользу от прохода ведущего муравья, зависит как от его положения в качестве ведомого, так и от категории ведущего муравья (O, U или L). N указывает количество наблюдений, использованных для получения среднего значения или правила.
(DOCX)
GUID: CC02753B-F27C-4DEB-820E-5D07AA646687
S2 Таблица: Сводка эксперимента с широким следом и результатов. Из [20] на основе 12 повторов. Тропа, соединяющая гнездо с источником пищи, имела ширину 5 см и длину 300 см. Поток муравьев, покидающих гнездо (выходящие муравьи) и выходящих из источника пищи (входящие муравьи), подсчитывали с интервалами в 1 минуту в течение 1 часа, а также измеряли долю груженых муравьев во входящем потоке.Было количественно определено формирование групп последовательных муравьев, движущихся в одном направлении в последовательности муравьев, наблюдаемых на тропе. На индивидуальном уровне измеряли скорость муравьев и исход лобовых столкновений между муравьями (правило приоритета). Были выделены три типа муравьев: муравьи-вылетевшие (O), порожние (U) муравьи и груженые муравьи (L). Были проанализированы результаты лобовых столкновений между исходящими муравьями и входящими гружеными муравьями (O vs L), а также исходящими муравьями и входящими муравьями без нагрузки (O vs U).Обычно после столкновения один муравей поворачивается (ПОВОРОТ), чтобы пропустить приближающегося муравья (ХОДЬБА). N указывает количество наблюдений, использованных для получения среднего значения или правила.(DOCX)
GUID: 6C6D5FB7-7525-4B7F-BBF2-F97969F06AE0
S1 Рис. , иллюстрирующий концепцию десинхронизации входящего и исходящего трафика. В момент времени 0 есть исходящие частицы (красные точки), входящие незагруженные частицы (синие точки) и входящие загруженные частицы (черная точка) около середины следа.Со временем красные частицы будут двигаться к источнику листьев (справа), а черные и синие частицы — к гнезду (слева), и когда частица пересекает середину следа, мы записываем пересечение как +1, если оно исходящее, — 1, если входящий порожний, и -2, если входящий загружен. Отметим, что на временных шагах 1 и 2 мы фиксируем входящие пересечения (-1). На временном шаге 3 происходит первое взаимодействие, при котором одна незагруженная частица сходит со следа, уступая дорогу бегущему муравью. Этот процесс продолжается в соответствии с правилами модели, и к временному шагу 14 мы собрали последовательность -1, -1, + 1, + 1, + 1, -2, -1, -1, -1, и из этого мы вычисляем размер группы путем подсчета последовательных записей с одним и тем же знаком.Здесь у нас сначала была группа из 2 входящих частиц (-1, -1), затем группа из 3 исходящих частиц (+ 1, + 1, + 1), а затем группа из 4 входящих частиц (-2, -1 , -1, -1). Это явление упоминается как десинхронизация входящего и исходящего трафика, включая формирование чередующихся групп входящих и исходящих муравьев в [22], и мы используем здесь ту же терминологию для частиц.(TIF)
GUID: F3177D67-F925-467A-B14A-3C7B36AE83B3
- Заявление о доступности данных
Все соответствующие данные находятся в документе, его вспомогательных информационных файлах и соответствующем коде.Соответствующий код можно загрузить с https://github.com/danielstrombom/StrombomDussutour2018/.
Abstract
Муравьи, термиты и люди часто образуют хорошо организованные и высокоэффективные тропы между разными местами. Однако микроскопические правила дорожного движения, ответственные за эту организацию и эффективность, до конца не изучены. В предыдущих экспериментальных исследованиях с муравьями-листорезами ( Atta colombica ) был выделен набор местных правил приоритета, и было предложено, чтобы эти правила управляли временной и пространственной организацией движения на тропах.Здесь мы представляем модель, основанную на этих правилах приоритета, чтобы исследовать, достаточны ли они для создания трафика, подобного тому, который наблюдался в экспериментах как на узком, так и на более широком маршруте. Установлено, что модель способна воспроизводить ключевые характеристики трафика на трассах. В частности, мы показываем, что предлагаемые правила приоритета вызывают рассинхронизацию в кластеры входящих и исходящих муравьев на узком следе, и что сегрегированный трафик, зависящий от типа приоритета, появляется на более широком следе.Из-за общего характера предлагаемых правил приоритета мы предполагаем, что они могут использоваться для моделирования организации движения у множества других видов муравьев.
Об авторе
Муравьи часто образуют тропы, чтобы транспортировать пищу и припасы, которые они находят, обратно в свое гнездо. Эти тропы имеют функцию, аналогичную дорогам, соединяющим дома людей с местным торговым центром, но хотя правила дорожного движения, которым должны следовать автомобили на наших дорогах, хорошо известны, правила дорожного движения, которые муравьи используют на своих тропах, все еще относительно неизвестны.Более ранние эксперименты с муравьями-листорезами предложили набор простых правил дорожного движения, по которым муравьи могут пытаться следовать по своим следам. Однако экспериментально проверить связь между предложенными правилами и наблюдаемой организацией дорожного движения сложно. Моделирование — полезный способ связать поведение, изолированное на индивидуальном уровне, и паттерн, зафиксированный на коллективном уровне. Здесь мы представляем и анализируем вычислительную модель на основе предложенных правил дорожного движения. Мы обнаружили, что с некоторыми изменениями предлагаемых правил действительно достаточно для воспроизведения ключевых характеристик общего движения муравьев, наблюдаемых в экспериментах.Укрепляя нашу веру в то, что эти правила дорожного движения могут использоваться муравьями-листорезами для регулирования организации дорожного движения, и из-за их простоты мы предполагаем, что аналогичные правила могут использоваться и другими видами муравьев.
Введение
Коллективное перемещение животных — широко распространенное явление, которое происходит в различных пространственных и временных масштабах у самых разных живых организмов, от клеток до пешеходов [1–4]. Часто лидеры или координаторы отсутствуют, и координация группы зависит от полностью децентрализованного процесса.Глобальный паттерн явно не кодируется, но возникает в результате многочисленных взаимодействий между людьми, которые имеют доступ только к локальной и ограниченной информации [5–7].
Во многих ситуациях движение внутри коллектива является однонаправленным, потому что оно связано с миграционными явлениями и вовлекает людей, движущихся в одном направлении. Социальные насекомые и люди — одни из редких организмов, у которых движения внутри коллектива преимущественно двунаправленные [8–12]. В частности, муравьи являются собирателями в центре и должны возвращаться в свое гнездо с пищей, собранной после каждого кормодобывающего события, что часто приводит к образованию тропинок с постоянным потоком движения между гнездом и источником пищи.У некоторых видов транспортный поток на этих тропах может быть чрезвычайно высоким, достигая более сотни муравьев в минуту, например красные древесные муравьи [13], муравьи-листорезы [14] и армейские муравьи [15]. Когда локальная концентрация особей на тропе очень высока, высокая частота лобовых столкновений может замедлить их движение [16–18]. Эти эффекты могут спровоцировать групповые дисфункции и снизить общую эффективность кормодобывания колонии. Таких негативных эффектов можно избежать, если муравьи используют механизмы рассредоточения, позволяющие лучше организовать движение [8].
Движение муравьев может быть организовано как в пространственном, так и во временном масштабе [8]. Пространственная организация движения характеризуется разделением полос движения, т.е. потоки входящих и исходящих муравьев не полностью перемешаны [19–21], а временная организация потока характеризуется последовательностью чередующихся кластеров входящих и исходящих муравьев [16, 22]. На сегодняшний день появление как пространственных, так и временных организаций, наблюдаемых в этих системах, остается в значительной степени необъяснимым.В частности, микроскопические правила движения, которым следуют отдельные муравьи при движении по тропам, в значительной степени неизвестны.
В попытке изолировать правила дорожного движения под микроскопом были проведены экспериментальные исследования организации движения муравьев-листорезов Atta colombica на узкой тропе [22] и на широкой тропе [20]. Следы муравьев-листорезов направляют рабочих к месту кормления и обратно, где они разрезают растительность на мелкие фрагменты и переносят их обратно в гнездо. Эти фрагменты затем включаются в грибок, которым питается колония.В экспериментах, чтобы добраться до источника листьев, муравьи были вынуждены двигаться либо по узкой тропе, позволяющей проходить только одной движущейся особи за раз [22], либо по широкой тропе, в десять раз большей [20]. На узкой тропе наблюдалась рассинхронизация входящего и исходящего трафика, включающая формирование чередующихся скоплений входящих и исходящих муравьев, а на широкой тропе наблюдалась степень сегрегации полос движения с муравьями-переносчиками листьев, перемещающимися почти исключительно по центральному участку тропы. описано.Обобщение результатов, полученных в ходе экспериментов, можно найти во вспомогательной таблице S1 (узкая трасса) и S2 (широкая трасса). Авторы предположили, что обе организации могут быть результатом набора местных правил приоритета, соблюдаемых на индивидуальном уровне, когда муравьи сталкиваются с другими муравьями на своем пути [20, 22]. Однако неизвестно, достаточны ли эти предлагаемые индивидуальные правила приоритета для создания наблюдаемой временной и пространственной организации трафика, и необходимо исследовать это моделирование.
Существует много хорошо известных моделей движения муравьев, большинство из которых являются моделями среднего поля, изучающими макроскопические свойства движения на тропах [23–31]. Однако для исследования трафика на групповом уровне, возникающего в результате повторяющихся локальных взаимодействий между движущимися людьми, более уместны так называемые модели самоходных частиц. Модели самоходных частиц — это пространственно-явные индивидуальные модели, в которых частицы локально взаимодействуют друг с другом в соответствии с набором правил.Эти модели варьируются от минимальных моделей, используемых для исследования фундаментальных свойств коллективного движения [32–35], до более сложных видоспецифичных моделей коллективного движения во всем: от клеток до насекомых, рыб, птиц, овчарок и пешеходов [9,10,36–44 ]. Подход модели самоходных частиц был успешно применен для моделирования движения муравьев у армейских муравьев [19] и черных садовых муравьев [45]. Однако в этих моделях не были выявлены характерные черты муравьев, выбегающих и связанных в гнездах, несмотря на то, что вариации в их маневренности и скорости существуют из-за транспорта пищи [22, 46].
Здесь мы вводим модель самоходных частиц для воспроизведения экспериментов с муравьями-листорезами Atta colombica на узкой тропе [22] и на широкой тропе [20], а также для исследования того, предложены ли местные правила приоритета в этих исследований достаточно, чтобы воспроизвести наблюдаемую организацию движения.
Модели и методы
Модель для узкой тропы
Чтобы сфокусировать наше исследование на том, за какие макроскопические свойства трафика отвечают только локальные правила приоритета, мы упрощаем модели муравьев (частиц) несколькими способами.В частности, предполагается, что частицы имеют постоянную длину 1 см и постоянную скорость, зависящую от типа. Имитируя экспериментальную установку, частицы движутся по одномерному следу длиной 300 см, соединяющему гнездо и источник листьев. Частицы покидают гнездо и листовой источник в соответствии с пуассоновским процессом, характеризуемым параметром скорости μ. В начале каждой симуляции частицы присутствуют в гнезде и источнике листа. Следуя экспериментальной работе, мы рассматриваем три типа частиц: исходящие (O), входящие незагруженные (U) и загруженные частицы (L).Вероятность загрузки частицы при выходе из листового источника составляет 0,24, как наблюдали в эксперименте (таблица S1). Из-за небольшой разницы в скорости, наблюдаемой между исходящими (O) и порожними муравьями (U), мы установили скорость с OU = 2,3 см / с для обоих типов частиц. Скорость загруженных частиц (L) установлена на с L = 1,9 см / с (таблица S1).
На узком следе формула обновления положения для каждой частицы имеет вид
x (t + Δt) = x (t) + δ (t) shΔt,
где x ( t ) — координата x частицы на следе в момент времени t (гнездо находится в x = 0, а листовой источник — в x = 300), s ∈ { s OU , s L } — скорость частицы, h ∈ {−1, 1} — направление частицы (1 для исходящего и -1 для входящих частиц) и Δ t = 0.1 — временной шаг. Значение δ ( t ) ∈ {0, 1} зависит от взаимодействий между частицами в момент времени t . δ ( t ) равно 1, если частица уступает дорогу, и 0, если частица останавливается и уступает дорогу. Две частицы взаимодействуют, когда они находятся на расстоянии 1 + 2 Δ t s OU друг от друга, чтобы учесть размер частиц. Взаимодействия между частицами определяются набором локальных правил приоритета, определенных в [22];
1.Незагруженная частица (U) не пытается пройти впереди загруженную частицу (L). Вместо этого он останавливается и ждет, пока груженый муравей не продвинется вперед достаточно, чтобы сделать еще один шаг.
2. Исходящая частица (O) останавливается и уступает место загруженной частице (L) и, возможно, ряду незагруженных частиц (U), следующих за загруженной частицей (см. «Кооперативное правило» ниже).
3. Ненагруженная частица (U) останавливается и уступает дорогу исходящей частице (O), если только исходящая частица (O) не ожидает после взаимодействия с загруженной частицей (см. «Кооперативное правило» ниже).
Для того, чтобы охватить все возможности взаимодействия, мы также включили следующие два правила, количественно не описанные в [22];
4. Частица любого типа (O, L и U) не пытается пройти перед собой другую частицу того же типа. Вместо этого он останавливается и ждет, пока частица не продвинется вперед достаточно, чтобы сделать еще один шаг.
5. Загруженная частица (L) не останавливается для неподвижных входящих частиц (U) перед ней.
Кооперативное правило
Когда исходящая частица уступает место загруженной частице, также может быть разрешен проход ряду ( n = 0,1,…, 15) порожних частиц, движущихся за груженым муравьем. Это явление было названо «правилом кооперации» в [22], и вероятность того, что n порожних муравьев извлекли выгоду из прохода груженого муравья таким образом в экспериментах, была количественно определена и представлена на (рис. 6 в [22]). ). Здесь мы используем экспериментально наблюдаемые вероятности и реализуем кооперативное правило следующим образом.Исходя из скорости частицы, порожней частице требуется приблизительно одна секунда, чтобы пройти неподвижную исходящую частицу сразу после прохождения загруженной частицы, а экспериментально определенная потеря времени на контакт составила 0,8 секунды (таблица S1). Таким образом, чтобы пропустить n незагруженных частиц, исходящая частица (O) ждет τ = 0,8 n секунд после встречи с загруженной частицей, прежде чем она снова начнет двигаться. Как только исходящая частица начинает двигаться, она снова имеет приоритет над незагруженными частицами.Правила движения для частиц на узкой тропе кратко изложены в.
Таблица 1
Правила дорожного движения по узкой тропе.
| O Поведение | U Поведение | L Поведение | |
|---|---|---|---|
| При обнаружении O | STOP | STOP * 927K 927 927 U915 915 915 915 9315 927 STOP | WALK |
| При обнаружении L | STOP | STOP | STOP |
В модели есть один неизвестный параметр: параметр скорости μ , связанный с процессом потока частиц Пуассона покидая гнездо и листовой источник.Из экспериментов [22] известно, что общее количество муравьев, пересекающих середину тропы за один час, в среднем составляло 5418,8 частиц (таблица S1). Используя моделирование, мы обнаружили, что общее значение μ = 1 дает поток 5347,2 (стандартное отклонение 73,5) за 1000 моделирования, поэтому мы использовали это при запуске моделирования для сравнения с экспериментами.
Модель для широкого следа
Эксперимент с широким следом [20] проводился с использованием той же экспериментальной процедуры, что и в эксперименте с узким следом, и результаты суммированы в таблице S2.Муравьев заставляли двигаться по тропе шириной 5 см и длиной 300 см, соединяющей гнездо и источник листьев (). В дополнение к наблюдениям, сделанным в экспериментах по узкой тропе на широкой трассе, была также количественно оценена пространственная организация движения. Количество и вид муравьев (O, U и L), проходящих середину тропы в трех разных зонах; регистрировались центральная зона (ширина 2,5 см) и две краевые зоны (ширина каждой 1,25 см) ().
Схема широкой тропы.Иллюстрирует определения центральной и краевой зон и систему координат ( x , w ), используемую в модели.
Основное различие между настройками узкого и широкого следа состоит в том, что у муравьев / частиц есть место для включения широкого следа, поэтому они не вынуждены останавливаться при встрече с муравьями / частицами с более высоким приоритетом. Вместо этого муравей / частица может повернуться, чтобы избежать столкновения, и мы адаптировали модель узкого следа к широкому следу, заменив все случаи остановки на поворот. Правила движения частиц по широкой тропе представлены в.
Таблица 2
Правила движения твердых частиц на широкой трассе.
| O Поведение | U Поведение | L Поведение | |
|---|---|---|---|
| При встрече с O | TURN | WALK 927 927 927 5 9315 9315 WALK 927 927 927 UTURN 9315 9315 927 927 927 URN | ПРОГУЛКА |
| При встрече с L | ОБОРОТ | ОБОРОТ | ОБОРОТ |
Формула обновления положения для каждой частицы в модели с широким следом:
{x (t + Δt) = x (t) + scos (θ (t)) Δtw (t + Δt) = w (t) + ssin (θ (t)) Δt
где x ( t ) — координата x частицы на следе в момент времени t (гнездо x = 0, а листовой источник x = 300), w ( t ) — координата w частицы в момент времени t (стенки расположены в w = 0 и w = 5), s ∈ { s OU , с L } — скорость частицы, Δ t = 0.1 — временной шаг, а θ (t) — это заголовок частицы в момент времени t . Заголовок θ ( т ) = θ d + θ I ( т ) состоит из двух компонентов: θ d ∈ {0 , π }, что равно 0 для исходящих частиц и π для входящих частиц, и θ I ∈ {- π / 2,0, π /2}, что является поворотным угол в результате взаимодействия и зависит от правил дорожного движения ().Во время взаимодействия частица i не повернется ( θ I = 0), если ей уступает место частица j . Повернется, если его не помешает частица j . В последнем случае он появится, если w i ( t ) ≥ w j ( t ), или вниз, если w i ( t ) < w j ( t ).Обратите внимание, что когда частица поворачивает, ее смещение в направлении x равно 0, потому что cos (± π2) = 0, поэтому ее прибытие в гнездо / лист задерживается на Δ t = 0,1 с на каждый временной шаг поворота.
Кооперативное правило, при котором порожнее следование за груженым иногда разрешается проезд, не имеет отношения к настройке широкого следа, потому что частицы вращаются вместо того, чтобы останавливаться. Как и в случае с узким следом, мы используем экспериментально наблюдаемый общий поток, чтобы установить параметр скорости μ , связанный с пуассоновским процессом муравьев, покидающих гнездо и источник листьев.Средний поток в экспериментах с широким следом составлял 8803 муравьев / час, а выбор μ = 0,8 приводит к расходу 8999,4 (стандартное отклонение 97,8), и мы используем это значение для моделирования. В отличие от случая с узкой тропой, где все муравьи входили и двигались по тропе в одном и том же вертикальном положении, на широкой тропе муравьи выходили на тропу из гнезда через небольшое отверстие, расположенное в центре тропы, и из источника листьев через узкую деревянную дорожку. палка прикреплена к центру следа. Итак, муравьи вошли близко к центру по обе стороны тропы, а затем рассеялись в направлении w.Чтобы смоделировать это, мы предполагаем, что вертикальная позиция входа ( w (0)) для каждого муравья обычно распределена со средним значением 2,5 (центр следа) и стандартным отклонением 0,8. Это гарантирует, что почти все позиции входа находятся между 0 и 5, и если сгенерированное w (0)> 5, мы устанавливаем w (0) = 4,99, а если w ( 0 ) <0, мы устанавливаем w (0) = 0,01.
Для анализа модели мы выполнили 1000 симуляций и рассчитали долю каждого типа частиц в каждой зоне следа, в дополнение к среднему и максимальному размеру группы, и сравнили результаты с экспериментальными результатами (таблица S2).Мы также провели ряд симуляций с заменой поворота на остановку, как на узкой тропе, чтобы исследовать причинные эффекты поворота в отношении пространственной организации на широком мосту.
Результаты
Сравнительная модель-эксперимент для узкой тропы
Главный экспериментальный результат заключался в том, что на узкой тропе произошла десинхронизация входящего и исходящего трафика, что включало формирование чередующихся групп входящих и исходящих муравьев. Рассинхронизация этого типа также возникла при моделировании модели, и полученные группы имеют несколько общих свойств с экспериментально наблюдаемыми группами.См. S1 Fig для иллюстрации концепции десинхронизации. В [22] для количественной оценки организации движения и структуры групп использовались четыре статистических показателя: (i) распределение групп по размеру, (ii) доля груженых муравьев в группах размером N , (iii) доля груженых муравьев на месте. P в группе, и (iv) соотношение групп размером N , возглавляемых груженым муравьем. Сравнение экспериментально наблюдаемых распределений и распределений, полученных в результате моделирования, представлено в.Мы видим, что в целом распределения, полученные в результате моделирования, сопоставимы с распределениями, полученными в ходе экспериментов. В частности, для групп размером больше 1 экспериментальные средние по существу находятся в пределах минимальных и максимальных значений распределений, созданных при моделировании для всех четырех статистических показателей. Основное несоответствие между симуляциями и экспериментами — это чрезмерная представленность групп размером 1 в распределении размеров групп, созданном симуляциями (). Кроме того, максимальный размер группы, наблюдаемый в экспериментах, составлял 74 (таблица S1), а в моделировании — 77 , а средний размер группы, наблюдаемый в экспериментах, составлял 5 . 2 (таблица S1) и в моделировании 4 . 2 .
Сравнительная модель-эксперимент для узкой тропы.На каждом графике синие кривые представляют экспериментальные средние, а значения соответствуют значениям, представленным на рисунках 2–5 в [22]. Красные звездочки обозначают средства моделирования, а черные линии обозначают максимум и минимум более 1000 симуляций.
Сравнительная модель-эксперимент для широкой тропы
Главный результат эксперимента заключался в том, что на широкой тропе наблюдалась определенная степень сегрегации полос движения.Груженые муравьи, возвращающиеся в гнездо, перемещались в основном в центральной зоне тропы, а порожние муравьи (U) чаще путешествовали в краевых зонах тропы. Что касается муравьев (O), то около двух третей из них путешествовали по центральной зоне тропы. Звездочками показаны результаты для каждого вида муравьев в каждом из 12 экспериментов. Коробчатые диаграммы представляют соответствующие измерения при моделировании с использованием модели широкого моста с использованием правила поворота () или правила остановки (). Мы обнаружили, что модель с широким мостом, использующая правило поворота, воспроизводит общую тенденцию движения загруженных частиц почти исключительно в центральной зоне, а исходящие частицы перемещаются в центральной зоне чаще, чем входящие незагруженные частицы ().Мы также обнаружили, что при моделировании средний размер группы составлял 2,0, а максимальный размер группы 23, по сравнению с экспериментальным средним размером группы 1,9 и максимальным размером группы 14 (таблица S2). Кроме того, это показывает, что, когда правило поворота заменяется правилом остановки, разделения полос движения не возникает, и мы делаем вывод, что разделение полос движения критически зависит от поворота в нашей модели.
Сравнительная модель-эксперимент для широкой тропы.Звездочки обозначают долю муравьев определенного вида, путешествующих в центральной зоне по следу в экспериментах.Прямоугольники представляют собой соответствующие измерения более 1000 симуляций (красные кресты представляют выбросы): (A) Модель широкого следа с правилом поворота и (B) Модель широкого следа с правилом остановки вместо правила поворота.
Обсуждение
Наша модель самоходных частиц, основанная на локальных правилах приоритета, представленных в [22], генерирует организацию движения, которая имеет несколько общих характеристик с организацией движения, наблюдаемой в экспериментах по узкой и широкой тропе.В частности, модель узкого следа воспроизводит рассинхронизацию входящего и исходящего трафика, а возникающие группы имеют несколько общих черт с экспериментально наблюдаемыми группами (). Модель широкого следа генерировала сегрегированный трафик, который разделяет определенные свойства с трафиком, наблюдаемым в экспериментах (). В частности, доля муравьев данного типа (L, O или U), путешествующих в центральной зоне, увеличивалась с приоритетом каждого типа (L> O> U) как в модели, так и в эксперименте.
Это говорит о правдоподобности того, что правила приоритета, предложенные в [22], являются ключевыми движущими силами организации трафика на этих трассах, потому что основные характеристики наблюдаемого трафика проистекают из них, даже когда остальная часть системы сильно идеализирована. Например, мы используем упрощенные модели муравьев с постоянной скоростью и длиной, которые всегда следуют правилам, и единственные стохастические компоненты в моделях связаны со временем выхода и позициями входа. В частности, мы считаем, что строгое следование правилу приводит к основному расхождению между результатами моделирования и данными, т.е.е. избыточное представительство групп размера 1 на узкой тропе (). Мы также знаем, что введение в модель различных типов стохастических нарушений правил не решает эту проблему, и мы уверены, что нарушения правил далеки от случайного возникновения, и для изучения этого потребуются новые эксперименты. Однако, хотя было бы интересно и потенциально полезно провести новые эксперименты для получения данных, которые позволят нам сделать определенные аспекты модели более реалистичными, это неизбежно сделало бы модель более сложной и, таким образом, затруднило бы изолирование эффектов общих механизмов, лежащих в основе организация движения.
Понимание основных принципов организации движения по тропам и определение факторов, влияющих на передвижения муравьев по тропам, имеют фундаментальное значение в биологии колоний социальных насекомых. Когда муравьев заставляли двигаться по узкой тропе, наблюдалось формирование чередующихся групп входящих и исходящих муравьев. Группы прилетающих муравьев часто возглавлялись гружеными муравьями, которые действуют медленнее, за ними следовали порожние муравьи. Модель воспроизводит это поведение, скорее всего, из-за правила, согласно которому входящие порожние муравьи не пытаются догнать груженых муравьев перед ними (Правило 1).Такое поведение может показаться пагубным, потому что порожние муравьи движутся медленнее, оставаясь позади груженого муравья, вместо того, чтобы двигаться быстрее, двигаясь с желаемой скоростью. Однако модель также включает так называемое кооперативное правило, которое допускает возможность того, что порожние муравьи следуют за груженым муравьем, чтобы извлечь выгоду из прохождения груженого (см. Правила 2 и 3). Эти порожние муравьи избегают лобовых столкновений с вылетающими муравьями и, таким образом, теряют свободное время, останавливаясь, как обычно, когда они встречают убегающего муравья.Более того, эта организация способствует передаче информации об уровне доступности листа за счет увеличения количества контактов между исходящими и входящими нагруженными муравьями, которые стимулируют первых разрезать и извлекать фрагменты листа по достижении конца следа [47–53]. Следуя той же идее, на широком следе смешанный поток исходящих и порожних муравьев вместо строгого разделения полос может показаться неоптимальным, но на самом деле это способствует передаче информации между муравьями и стимулирует выезжающих рабочих срезать и собирать листовой материал на месте. конец следа, что способствует повышению эффективности кормодобывания [8, 20, 48, 49].
Наши результаты показывают, что муравьи могут использовать одни и те же общие правила приоритета на обоих следах, а наблюдаемые различия связаны с ограничениями, налагаемыми окружающей средой. В частности, на более широкой тропе есть место для поворота во время столкновения, тогда как на узкой тропе эта опция недоступна, поэтому муравьи должны останавливаться, уступая дорогу. Фактически, из-за простоты этих правил мы считаем, что они могут быть применимы, с соответствующими модификациями, для других видов муравьев в аналогичных условиях.Например, такое же правило приоритета между груженым и порожним муравьями наблюдалось у другого муравья-листореза Atta cephalotes [47] и у красного древесного муравья Formica rufa [13]. Кроме того, аналогичные типы правил приоритета, вероятно, будут действовать и для армейских муравьев, потому что возвращающиеся груженые муравьи, как известно, менее мобильны и обладают меньшей маневренностью, чем исходящие муравьи без груза [46]. Отметим также, что существует соответствие между правилами приоритета и потенциальной полезностью каждого типа муравьев в отношении сбора листьев.Груженые муравьи имеют наивысший приоритет, и их — это , собирающие листья, исходящие муравьи имеют второй высший приоритет, и они потенциально — , собирающие листья, а входящие незагруженные муравьи имеют самый низкий приоритет, и они не являются собирающими листья. Мы предполагаем, что правила приоритета у других видов, вероятно, будут соответствовать потенциальной полезности каждого типа муравьев в отношении кормовой активности колонии.
Наша модель несколько отличается от более ранних spp-моделей муравьиного трафика.В частности, мы моделируем три типа муравьев (исходящие, порожние и груженые), тогда как [19,45] включают только два; входящий и исходящий, и эти два типа по существу идентичны, за исключением разной скорости поворота при уклонении в [19]. Более того, скорость уклонения от поворота одинакова для всех особей определенного типа, т.е. исходящих или прибывающих, несмотря на тот факт, что у реальных муравьев есть различия в маневренности и скорости из-за транспортировки пищи [22, 46]. Наша модель включает эту изменчивость, и наши правила приоритета достаточно гибки, чтобы моделировать трафик как на узких, так и на широких трассах.В [19,45] моделируется только движение по более широким тропам, и хотя подход с уклонением от скорости поворота может быть изменен для работы на узких тропах, по которым, предположительно, и армейские муравьи [19], и черные садовые муравьи [45] иногда путешествуют в дикой природе. , мы прогнозируем, что, если входящий поток не разделен на порожних и загруженных муравьев с различным поведением, модель не сможет генерировать трафик, совместимый с реальным трафиком муравьев [16].
Часто думают о сходстве между движением муравьев, пешеходным движением и движением транспортных средств.Эти аналогии послужили поводом для многочисленных исследований [54–58]. Однако даже если на первый взгляд движение по муравьиным следам может показаться похожим на движение людей, есть важные различия, которые следует учитывать при сравнении их организации движения. Во-первых, движение муравьев носит кооперативный характер, потому что все муравьи преследуют общую цель, а именно собирать пищу для колонии. Во-вторых, у муравьев нет таких же механических ограничений, как у пешеходов или транспортных средств. Из-за своей малой массы они имеют низкую инерцию и не повреждаются при столкновении, что позволяет в определенной степени смешивать противоположные потоки на тропах кормодобывания.Несмотря на это, движение муравьев остается важным источником вдохновения для различных исследователей, работающих с большими группами взаимодействующих частиц в таких разнообразных дисциплинах, как молекулярная биология [59], статистическая физика [60] и телекоммуникационные науки [61].
Дополнительная информация
S1 Таблица
Сводка эксперимента с узким следом и его результатов.Из [22] на основе 12 повторов. Тропа, соединяющая гнездо с источником пищи, имела ширину 0,5 см и длину 300 см.Поток муравьев, покидающих гнездо (исходящие муравьи), и поток, покидающий источник листьев (входящие муравьи), подсчитывали с интервалами в 1 минуту в течение 1 часа, а также измеряли долю груженых муравьев во входящем потоке. Было количественно определено формирование групп последовательных муравьев, движущихся в одном направлении в последовательности муравьев, наблюдаемых на тропе. На индивидуальном уровне измеряли скорость муравьев и исход лобовых столкновений между муравьями (правило приоритета). Были выделены четыре типа муравьев: исходящие муравьи (O), (входящие) порожние муравьи (U), (входящие) груженые муравьи (L) и порожние муравьи, следующие за груженым муравьем (U (L)).Был проанализирован результат лобового столкновения между вылетающими муравьями и гружеными муравьями (O vs L), исходящими муравьями и муравьями без нагрузки (O против U), а также муравьями без нагрузки и гружеными муравьями (U против L). Обычно после столкновения один муравей перемещается в сторону следа (СТОП), чтобы пропустить приближающегося муравья (ХОДЬБА). Была измерена потеря времени на столкновение, и она не различалась в зависимости от типа муравьев. Когда один муравей уступал место другому, он обычно уходил в сторону от тропы и позволял муравью пройти.Следующие муравьи могут извлечь выгоду из прохода ведущего муравья (муравья, которому уступили дорогу), прежде чем муравей, который уступил дорогу, вернется на вершину следа. Этот последний эффект соответствует кооперативному поведению муравьев, потому что последующие муравьи извлекают выгоду из прохождения ведущего муравья. Вероятность того, что муравей получит пользу от прохода ведущего муравья, зависит как от его положения в качестве ведомого, так и от категории ведущего муравья (O, U или L). N указывает количество наблюдений, использованных для получения среднего значения или правила.
(DOCX)
S2 Таблица
Краткое изложение эксперимента с широким следом и результатов.Из [20] на основе 12 повторов. Тропа, соединяющая гнездо с источником пищи, имела ширину 5 см и длину 300 см. Поток муравьев, покидающих гнездо (выходящие муравьи) и выходящих из источника пищи (входящие муравьи), подсчитывали с интервалами в 1 минуту в течение 1 часа, а также измеряли долю груженых муравьев во входящем потоке. Было количественно определено формирование групп последовательных муравьев, движущихся в одном направлении в последовательности муравьев, наблюдаемых на тропе.На индивидуальном уровне измеряли скорость муравьев и исход лобовых столкновений между муравьями (правило приоритета). Были выделены три типа муравьев: муравьи-вылетевшие (O), порожние (U) муравьи и груженые муравьи (L). Были проанализированы результаты лобовых столкновений между исходящими муравьями и входящими гружеными муравьями (O vs L), а также исходящими муравьями и входящими муравьями без нагрузки (O vs U). Обычно после столкновения один муравей поворачивается (ПОВОРОТ), чтобы пропустить приближающегося муравья (ХОДЬБА). N указывает количество наблюдений, использованных для получения среднего значения или правила.
(DOCX)
S1 Рис.
Иллюстрирует концепцию десинхронизации входящего и исходящего трафика.В момент времени 0 есть исходящие частицы (красные точки), входящие незагруженные частицы (синие точки) и входящие загруженные частицы (черная точка) около середины следа. Со временем красные частицы будут двигаться к источнику листьев (справа), а черные и синие частицы — к гнезду (слева), и когда частица пересекает середину следа, мы записываем пересечение как +1, если оно исходящее, — 1, если входящий порожний, и -2, если входящий загружен.Отметим, что на временных шагах 1 и 2 мы фиксируем входящие пересечения (-1). На временном шаге 3 происходит первое взаимодействие, при котором одна незагруженная частица сходит со следа, уступая дорогу бегущему муравью. Этот процесс продолжается в соответствии с правилами модели, и к временному шагу 14 мы собрали последовательность -1, -1, + 1, + 1, + 1, -2, -1, -1, -1, и из этого мы вычисляем размер группы путем подсчета последовательных записей с одним и тем же знаком. Здесь у нас сначала была группа из 2 входящих частиц (-1, -1), затем группа из 3 исходящих частиц (+ 1, + 1, + 1), а затем группа из 4 входящих частиц (-2, -1 , -1, -1).Это явление упоминается как десинхронизация входящего и исходящего трафика, включая формирование чередующихся групп входящих и исходящих муравьев в [22], и мы используем здесь ту же терминологию для частиц.
(TIF)
Благодарности
Мы благодарны Сэмюэлю Бешерсу за то, что он позволил нам использовать его лабораторное оборудование.
Отчет о финансировании
Авторы не получали специального финансирования для этой работы.
Список литературы
1. Самптер Д.Коллективное поведение животных. Издательство Принстонского университета; 2010. [Google Scholar] 2. Вичек Т., Заферидис А. Коллективное движение. Phys Rep.2012; 517: 71–140. [Google Scholar] 3. Пэрриш Дж., Хамнер В. Группы животных в трех измерениях. Издательство Camtrail University Press; 1997. [Google Scholar] 4. Хеппнер Ф. Птичьи летные образования. Кольцевание птиц. 1974; 45: 160–169. [Google Scholar] 5. Camazine S, Deneubourg JL, Franks N, Sneyd J, Theraulaz G и др. Самоорганизация в биологических системах. Издательство Принстонского университета; 2001 г.[Google Scholar] 6. Пэрриш Дж., Вискидо С., Грюнбаум Д. Самоорганизованные косяки рыб: исследование новых свойств. J. Comp Physiol. 2001; 135: 315–325. [Google Scholar] 7. Кузин И., Краузе Я. Самоорганизация и коллективное поведение позвоночных. Adv Stud Behav. 2003; 32: 1–75. [Google Scholar] 8. Фуркассе V, Дюссютур А, Денебург JL. Правила дорожного движения Ant. J Exp Biol. 2010; 213: 2357–2363. 10.1242 / jeb.031237 [PubMed] [CrossRef] [Google Scholar] 9. Хелбинг Д., Молнр П., Фаркас И., Болай К. Самоорганизующееся пешеходное движение.Environ Plann B. 2001; 28: 361–383. [Google Scholar] 10. Муссаид М., Хелбинг Д., Тераулаз Г. Как простые правила определяют поведение пешеходов и стихийные бедствия. Proc Natl Acad Sci USA. 2011; 108: 6884–6888. 10.1073 / pnas.1016507108 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 11. Муссаид М., Гийо Э., Моро М., Ференбах Дж., Шабирон О. и др. Нестабильность движения в самоорганизованных пешеходных толпах. PLoS Comput Biol. 2012; 8 (3): e1002442 10.1371 / journal.pcbi.1002442 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 12.Джон А., Шадшнайдер А., Чоудхури Д., Нишинари К. Коллективные эффекты в движении по двунаправленным муравьиным тропам. J Theor Biol. 2004; 231: 279–285. 10.1016 / j.jtbi.2004.06.022 [PubMed] [CrossRef] [Google Scholar] 13. Холт С. О кормовой активности лесного муравья. J Anim Ecol. 1955; 24: 1–34. [Google Scholar] 14. Вирт Р., Херц Х., Рил Р., Бейшлаг В., Хельдоблер Б. Растительноядность муравьев-листорезов: тематическое исследование Atta colombica в тропических лесах Панамы. Springer Science & Business Media; 2013.[Google Scholar] 15. Готвальд WH. Армейские муравьи: биология социального хищничества. Издательство Корнельского университета; 1995. [Google Scholar] 16. Дюссютур А., Денебург Ю.Л., Фуркассе В. Временная организация двунаправленного движения в муравье Lasius niger . J Exp Biol. 2005; 208: 2903–2912. 10.1242 / jeb.01711 [PubMed] [CrossRef] [Google Scholar] 17. Дюссютур А., Николис С., Денебург Дж. Л., Фуркассе В. Коллективные решения муравьев при кормлении в условиях скопления людей. Behav Ecol Sociobiol. 2006; 61: 17–30.[Google Scholar] 18. Бурд М., Аранвела Н. Частота встреч и скорость ходьбы собирателей в потоке муравьев-листорезов. Insectes Soc. 2003; 50: 3–8. [Google Scholar] 19. Кузин И., Фрэнкс Н. Самоорганизация полосы движения и оптимизация транспортного потока у армейских муравьев. Proc R Soc Lond B. 2003; 270: 139–146. [Бесплатная статья PMC] [PubMed] [Google Scholar]20. Дассютур А. Организация пространственно-временного коллективного размещения chez les fourmis. Докторская диссертация, Тулуза 3; 2004
21. Хенике К., Блисс П. и Мориц Р. Ф. (2015). Влияние плотности движения и скорости движения стволов Formica pratensis. Наука о природе, 102 (3–4), 17 10.1007 / s00114-015-1267-6 [PubMed] [CrossRef] [Google Scholar] 22. Дуссютур А., Бешерс С., Денебург Дж. Л., Фуркасси В. Правила приоритета регулируют организацию движения по кормовым тропам у муравьев-листорезов Atta colombica . J Exp Biol. 2009; 212: 499–505. 10.1242 / jeb.022988 [PubMed] [CrossRef] [Google Scholar] 23. Денебург Дж. Л., Госс С., Фрэнкс Н., Пастилс Дж.Слепой ведет слепого: моделирование химически опосредованных паттернов налетов армейских муравьев. J Insect Behav. 1989; 2: 719–725. [Google Scholar] 24. Стикленд Т., Бриттон Н., Фрэнкс Н. Алгоритмы поиска пищи для муравьев. Naturwissenschaften. 1993; 80: 427–430. [Google Scholar] 25. Стикленд Т., Бриттон Н., Фрэнкс Н. Сложные следы и простые алгоритмы поиска пищи для муравьев. Proc R Soc B. 1995; 260: 53–58. [Google Scholar] 26. Бриттон Н., Стикленд Т., Фрэнкс Н. (1998) Анализ алгоритмов кормодобывания муравьев. J Biol Syst 6: 315–336.[Google Scholar] 27. Николис С., Денебур Ж.Л. Новые модели и набор пищи у муравьев: аналитическое исследование. J Theor Biol. 1999; 198: 575–592. 10.1006 / jtbi.1999.0934 [PubMed] [CrossRef] [Google Scholar] 28. Бикман М., Самптер Д., Ратниекс Ф. Фазовый переход между неупорядоченным и упорядоченным кормлением у муравьев-фараонов. Proc Natl Acad Sci USA. 2001; 98: 9703–9706. [Бесплатная статья PMC] [PubMed] [Google Scholar] 29. Dussutour A, Fourcassié V, Helbing D, Deneubourg JL. Оптимальная организация движения муравьев в условиях скопления людей.Природа. 2004; 428: 70–73. 10.1038 / природа02345 [PubMed] [CrossRef] [Google Scholar] 30. Джонсон К., Росси Л. Математическое и экспериментальное исследование динамики следа кормления муравьев. J theor Biol. 2006; 241: 360–369. 10.1016 / j.jtbi.2005.12.003 [PubMed] [CrossRef] [Google Scholar] 31. Джон А., Шадшнайдер А., Чоудхури Д., Нишинари К. Транспортное коллективное движение муравьев по тропам: отсутствие застрявшей фазы. Phys Rev Let. 2009; 102: 108001. [PubMed] [Google Scholar] 32. Vicsek T, Czirók A, Ben-Jacob E, Cohen I, Shochet O.(1995) Новый тип фазового перехода в системе самодвижущихся частиц. Phys Rev Let. 1995; 7: 1226–1229. [PubMed] [Google Scholar] 33. Стрёмбом Д. Коллективное движение от местного притяжения. J Theor Biol. 2011; 283: 145–151. 10.1016 / j.jtbi.2011.05.019 [PubMed] [CrossRef] [Google Scholar] 34. Романчук П., Кузин И., Шиманский-Гейер Л. Коллективное движение из-за индивидуального побега и реакции преследования. Phys Rev Let. 2009; 102: 010602. [PubMed] [Google Scholar] 35. Стрёмбом Д., Сильестам М., Парк Дж., Самптер Д.Форма и динамика местного притяжения. Eur Phys J ST. 2015; 224: 17–18. [Google Scholar] 36. Аоки И. Имитационное исследование механизма стайной у рыб. Бык Япония Soc Sci Fish. 1982; 48: 1081–1088 [Google Scholar] 37. Хут А., Виссел С. Моделирование движения косяков рыб. J Theor Biol. 1991; 156: 365–385. [Google Scholar] 38. Couzin I, Krause J, James R, Ruxton G, Franks N. Коллективная память и пространственная сортировка в группах животных. J Theor Biol. 2002; 218: 1–11. [PubMed] [Google Scholar] 39.Исобе М., Хелбинг Д., Нагатани Т. Эксперимент, теория и моделирование эвакуации из комнаты без видимости. Phys Rev E. 2004; 68: 6884–6888. [PubMed] [Google Scholar] 40. Hemelrijk C, Kunz H. Распределение плотности и сортировка по размеру в косяках рыб: индивидуальная модель. Behav Ecol. 2005; 16: 178–187. [Google Scholar] 41. Пэрриш Дж., Висидо С. Правила дорожного движения в косяках рыб: обзор агентных подходов. В: Hemelrijk C Editor. Самоорганизация и эволюция социального поведения; 2005 г.[Google Scholar] 42. Hildenbrandt H, Carere C, Hemelrijk C. Самоорганизованные воздушные показы тысяч скворцов: модель. Behav Ecol. 2010; 21: 1349–1359. [Google Scholar] 43. Люкман Р., Ли Х, Эдельштейн-Кешет Л. Вывод индивидуальных правил из коллективного поведения. Proc Natl Acad Sci USA. 2010; 107: 12576–80. 10.1073 / pnas.1001763107 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 44. Стрембом Д., Манн Р., Уилсон А., Хейлс С., Мортон А. и др. Решение пастырской проблемы: эвристика для выпаса автономных, локально взаимодействующих агентов.Интерфейс JR Soc 2014; 11100: 20140719. [Бесплатная статья PMC] [PubMed] [Google Scholar] 45. Кутсу А., Хе С. Изучение организации движения муравьев в условиях скопления людей с использованием индивидуального моделирования и эволюционных вычислений. IEEE Trans Evol Comput. 2009; 2: 25–41. [Google Scholar] 46. Золликофер С. Ходячие движения муравьев — влияние морфологии тела. J Exp Biol. 1994; 192: 107–118. [PubMed] [Google Scholar] 47. Бурд М., Арчер Д., Аранвела Н., Стрэдлинг Д. Динамика движения листорезов и, Atta cephalotes .Am Nat. 2002; 159: 283–293. 10.1086 / 338541 [PubMed] [CrossRef] [Google Scholar] 48. Дюссютур А., Бешерс С., Денебург Дж. Л., Фуркасси В. Скучивание увеличивает продуктивность кормления у муравьев-листорезов Atta colombica . Insectes Soc. 2007; 54: 158–165. [Google Scholar] 49. Дюссютур А., Денебург Дж. Л., Бешерс С. и Фуркассе В. (2009). Индивидуальное и коллективное решение проблем в контексте кормодобывания у муравья-листореза Atta colombica. Познание животных, 12 (1), 21. [PubMed] [Google Scholar] 50.Фарджи-Бренер А., Шиншилла Ф., Рифкин С., Куэрво А.С., Триана Е. и др. «Эффект водителя грузовика у муравьев-листорезов: как отдельный груз влияет на скорость ходьбы сородичей». Physiol Entomol. 2011; 36: 128–134. [Google Scholar] 51. Роцес Ф, Боллацци М. Передача информации и организация кормодобывания травоядных и листорезных муравьев В: Jarau S, Hrncir M Editors. Использование пищевых продуктов социальными насекомыми: экологический, поведенческий и теоретический подходы. CRC Press; 1999. [Google Scholar] 52. Бушебти С., Феррере С., Виттори К., Латиль Г., Дассютур А. и Фуркассе В. (2015). Частота контакта регулирует эффективность кормодобывания у муравьев-листорезов. Научные отчеты, 5, 18650 10.1038 / srep18650 [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar] 53. Сибилс-Мартина Л., Элизальде Л. и Фарджи-Бренер А. Г. За углом правила дорожного движения: выгул муравьев-листорезов по точкам разветвления на тропах стволов. Insectes Sociaux, 1–7. [Google Scholar] 54. Нишинари К., Сугавара К., Казама Т., Шадшнайдер А., Чоудхури Д.Моделирование самодвижущихся частиц: муравьи-собиратели и пешеходы. Physica A. 2006; 372: 132–141. [Google Scholar] 55. Паризи Д. Р., Сория С. А., Хосенс Р. Повторный визит к эффекту «быстрее — медленнее» при побеге муравьев: муравьи не ведут себя как люди. Безопасность наук. 2015; 72, 274–282. [Google Scholar] 56. Готтлиб Дж., Пухта М., Солнон С. Изучение подходов к жадным, локальным поискам и оптимизации колоний муравьев для задач определения последовательности автомобилей В: Springer; Берлин Гейдельберг: Приложения эволюционных вычислений (.; 2004; 246–257.[Google Scholar] 57. Шадшнайдер А., Кирхнер А., Нишинари К. От муравьиных троп к пешеходной динамике. Appl Bionics Biomech. 2003; 1, 11–19. [Google Scholar] 58. Джон А., Шадшнайдер А., Чоудхури Д., Нишинари К. Характеристики транспортного потока, вдохновленного муравьями. Swarm Intell. 2008; 2, 25–41. [Google Scholar] 59. Табони Дж. Микротрубочки как колонии молекулярных муравьев. Biol Cell. 2006; 98: 603–617. 10.1042 / BC20050087 [PubMed] [CrossRef] [Google Scholar] 60. Чоудхури Д., Нишинари К., Шадшнайдер А. Самоорганизованные модели и транспортный поток в колониях организмов: от бактерий и социальных насекомых до позвоночных.Фазовый переход. 2004; 77: 601–624. [Google Scholar] 61. Блюм К. Оптимизация колонии муравьев: введение и последние тенденции. Phys Life Rev.2005; 2: 353–373. [Google ученый] .