


Не спать! Как контролировать усталость водителя — Транспорт на vc.ru
Как правило, современные автомобили оснащены системой контроля усталости. Они используются для того, чтоб проводить анализ взаимодействия водителя на руль и педали. В случае, если система обнаружит признаки утомления, то высветит на приборной панели изображение чашки с кофе и подаст звуковой сигнал. Как сегодня работают системы контроля усталости водителя, поделился Александр Сапов, CEO международного сервиса по бронированию трансферов GetTransfer.com.
{«id»:95806,»url»:»https:\/\/vc.ru\/transport\/95806-ne-spat-kak-kontrolirovat-ustalost-voditelya»,»title»:»\u041d\u0435 \u0441\u043f\u0430\u0442\u044c! \u041a\u0430\u043a \u043a\u043e\u043d\u0442\u0440\u043e\u043b\u0438\u0440\u043e\u0432\u0430\u0442\u044c \u0443\u0441\u0442\u0430\u043b\u043e\u0441\u0442\u044c \u0432\u043e\u0434\u0438\u0442\u0435\u043b\u044f»,»services»:{«facebook»:{«url»:»https:\/\/www.
 ru\/transport\/95806-ne-spat-kak-kontrolirovat-ustalost-voditelya&text=\u041d\u0435 \u0441\u043f\u0430\u0442\u044c! \u041a\u0430\u043a \u043a\u043e\u043d\u0442\u0440\u043e\u043b\u0438\u0440\u043e\u0432\u0430\u0442\u044c \u0443\u0441\u0442\u0430\u043b\u043e\u0441\u0442\u044c \u0432\u043e\u0434\u0438\u0442\u0435\u043b\u044f»,»short_name»:»TG»,»title»:»Telegram»,»width»:600,»height»:450},»odnoklassniki»:{«url»:»http:\/\/connect.ok.ru\/dk?st.cmd=WidgetSharePreview&service=odnoklassniki&st.shareUrl=https:\/\/vc.ru\/transport\/95806-ne-spat-kak-kontrolirovat-ustalost-voditelya»,»short_name»:»OK»,»title»:»\u041e\u0434\u043d\u043e\u043a\u043b\u0430\u0441\u0441\u043d\u0438\u043a\u0438″,»width»:600,»height»:450},»email»:{«url»:»mailto:?subject=\u041d\u0435 \u0441\u043f\u0430\u0442\u044c! \u041a\u0430\u043a \u043a\u043e\u043d\u0442\u0440\u043e\u043b\u0438\u0440\u043e\u0432\u0430\u0442\u044c \u0443\u0441\u0442\u0430\u043b\u043e\u0441\u0442\u044c \u0432\u043e\u0434\u0438\u0442\u0435\u043b\u044f&body=https:\/\/vc.
ru\/transport\/95806-ne-spat-kak-kontrolirovat-ustalost-voditelya&text=\u041d\u0435 \u0441\u043f\u0430\u0442\u044c! \u041a\u0430\u043a \u043a\u043e\u043d\u0442\u0440\u043e\u043b\u0438\u0440\u043e\u0432\u0430\u0442\u044c \u0443\u0441\u0442\u0430\u043b\u043e\u0441\u0442\u044c \u0432\u043e\u0434\u0438\u0442\u0435\u043b\u044f»,»short_name»:»TG»,»title»:»Telegram»,»width»:600,»height»:450},»odnoklassniki»:{«url»:»http:\/\/connect.ok.ru\/dk?st.cmd=WidgetSharePreview&service=odnoklassniki&st.shareUrl=https:\/\/vc.ru\/transport\/95806-ne-spat-kak-kontrolirovat-ustalost-voditelya»,»short_name»:»OK»,»title»:»\u041e\u0434\u043d\u043e\u043a\u043b\u0430\u0441\u0441\u043d\u0438\u043a\u0438″,»width»:600,»height»:450},»email»:{«url»:»mailto:?subject=\u041d\u0435 \u0441\u043f\u0430\u0442\u044c! \u041a\u0430\u043a \u043a\u043e\u043d\u0442\u0440\u043e\u043b\u0438\u0440\u043e\u0432\u0430\u0442\u044c \u0443\u0441\u0442\u0430\u043b\u043e\u0441\u0442\u044c \u0432\u043e\u0434\u0438\u0442\u0435\u043b\u044f&body=https:\/\/vc.
Способы мониторинга усталости водителя от отечественных разработчиков
В России это направление только начинает развиваться. В столице планируют к 2020 году блокировать возможность брать заказы тем водителям, которые отработали больше 8 часов, не прошли медицинский осмотр и не продлили ОСАГО.
Задумываются о безопасности, прежде всего, городские власти и крупные службы такси.
Они тестируют обмен данными о том, сколько времени зарегистрированные сразу в нескольких сервисах водители проводят на линии.
Яндекс еще в августе начал испытывать собственную систему мониторинга усталости на основе инфракрасной видеокамеры и специального программного обеспечения. Оборудование выделяет на лице водителя 68 точек и по ним отслеживает, как часто человек моргает, зевает или наклоняет голову. Если отмечается усталость, то следует звуковое предупреждение или отключение от заказов.
Как работают системы контроля?
Пока основным способом слежения остается фиксация времени нахождения машины на линии. Это делается с помощью тахографов, спутников или приложений для поиска заказов.
Однако такие системы не дают стопроцентной гарантии того, что состояние человека удовлетворяет требованиям безопасного вождения. Для этого и появляется все более сложное оборудование, оценивающее мимику и действия находящегося за рулем человека.
Для борьбы с пьяным вождением используются встроенные алкозамки, не позволяющие завести машину без отрицательной пробы на пары спиртного в выдохе. Ставятся они обычно в качестве наказания для ранее привлекавшихся за такое нарушение водителей и работают в течение определенного срока. В России эта система тестировалась, была признана эффективной, но большого распространения не получила, однако в США, Новой Зеландии и Швеции активно используются.
Минусы обычных тахографов
Установка тахографов в целом дает только преимущества — на дорогах становится безопаснее, так как отслеживается количество отработанных водителем часов и скорость автомобиля. Но, как уже говорилось выше, состояние управляющего транспортным средством человека это оборудование не отслеживает. А человек вполне может выйти на линию с утра больным или сильно уставшим. Именно для этого ответственные таксомоторные компании внедряют новые системы контроля. Чаще всего это именно камеры, не дающие водителю уснуть или отвлечься. Отслеживают время за рулем и мониторят усталость обычно только самые крупные и ответственные компании.
Но, как уже говорилось выше, состояние управляющего транспортным средством человека это оборудование не отслеживает. А человек вполне может выйти на линию с утра больным или сильно уставшим. Именно для этого ответственные таксомоторные компании внедряют новые системы контроля. Чаще всего это именно камеры, не дающие водителю уснуть или отвлечься. Отслеживают время за рулем и мониторят усталость обычно только самые крупные и ответственные компании.
Процент ДТП вследствие усталости водителей
Есть статистика, согласно которой из-за сонных водителей происходит около 10% ДТП. Проблема не выглядит столь очевидной только потому, что о ней мало говорят. Однако надо понимать, что пьяные водители совершают примерно столько же аварий. При этом алкоголь становится причиной ДТП чаще в городах, и значительная часть происшествий обходится только повреждением имущества. Аварии из-за усталости водителя практически всегда происходят за городом, где скорость движения выше, а значит и последствия тяжелее.
При этом алкоголь становится причиной ДТП чаще в городах, и значительная часть происшествий обходится только повреждением имущества. Аварии из-за усталости водителя практически всегда происходят за городом, где скорость движения выше, а значит и последствия тяжелее.
Что уже сделано в России для мониторинга состояния водителей?
По закону в нашей стране автобусы вместимостью более 8 пассажиров и грузовики грузоподъемностью более 3,5 т оснащаются тахографами. Эти требования соблюдаются неукоснительно, все остальное пока находится на стадии законопроектов и частных инициатив.
Увы, тахограф можно обмануть, в том числе, и электронный. В июне МАДИ предложил ставить на все автобусы и грузовики систему мониторинга, предотвращающую засыпание водителя. Она следит, прежде всего, за его пульсом, дыханием и положением головы. Если человек начнет засыпать, то на него предполагается воздействовать звуковыми, тактильными (вибромотор в сиденье) и зрительными сигналами.
В июне МАДИ предложил ставить на все автобусы и грузовики систему мониторинга, предотвращающую засыпание водителя. Она следит, прежде всего, за его пульсом, дыханием и положением головы. Если человек начнет засыпать, то на него предполагается воздействовать звуковыми, тактильными (вибромотор в сиденье) и зрительными сигналами.
Для такси никаких обязательных прописанных в законах требований о наличии систем слежения за водителем пока нет. Компании, пытающиеся устанавливать их по своей воле, преследуют разные цели: борются за безопасность клиентов, внедряют перспективные технологии с прицелом в будущее или повышают привлекательность собственных услуг.
Ситуация зарубежом
 Их установка выгодна не только для контроля за усталостью, но и для отслеживания маршрута или пробега. Если за этими моментами не следить, то водители начинают, например, сливать топливо.
Их установка выгодна не только для контроля за усталостью, но и для отслеживания маршрута или пробега. Если за этими моментами не следить, то водители начинают, например, сливать топливо.Устройств, следящих за состоянием водителя, существует достаточно много. Например, отслеживаются манипуляции с рулевым колесом. Бодрствующий человек управляет автомобилем не так, как засыпающий. Для последнего характерны длительные перерывы в движении рулем с периодическими резкими поворотами.
Другие устройства отслеживают наклон головы. Если человек начинает дремать, голова у него падает вперед, и система подает громкий звуковой сигнал.
Существуют аппараты “Антисон”, измеряющие изменение кожно-гальванической реакции.
Выглядят они обычно как браслеты или кольца для двух пальцев. Перед тем, как человек начнет засыпать, электрическое сопротивление его кожи меняется, что показывает снижение реакции.
В США дальнобойщики часто ставят на панели аппарат с периодически загорающейся лампочкой. Она отключается нажатием кнопки. Интервалы включения неравномерные, и если водитель начинает медлить с выключением, то подается тревожный сигнал.
В каких автомобилях есть системы слежения за водителями
Системы контроля бывают разные по сложности использующихся устройств и оцениваемым показателям. Например, в автомобилях Mercedes стал привычным помощник, отслеживающий манеру езды. В первые 20 минут поездки он собирает информацию о стиле вождения, и в дальнейшем при его изменении выдает предупреждения и предлагает отдохнуть. Погодные условия и изменение качества дорожного полотна тоже учитываются, что минимизирует число ложных срабатываний. Такая функция присутствует в большинстве новых авто Mercedes.
В первые 20 минут поездки он собирает информацию о стиле вождения, и в дальнейшем при его изменении выдает предупреждения и предлагает отдохнуть. Погодные условия и изменение качества дорожного полотна тоже учитываются, что минимизирует число ложных срабатываний. Такая функция присутствует в большинстве новых авто Mercedes.
Hyundai при выпуске модели Genesis еще в 2015 году ставил в салоне датчики углекислого газа. Его избыток говорит о том, что человек испытывает повышенную сонливость. При срабатывании датчика автоматически приоткрываются вентиляционные отверстия.
Если говорить о системах со слежением за водителем с использованием видеокамер, то они действительно устанавливаются только в дорогих авто. Причем эта опция остается для покупателей спорной — не все согласны платить за то, что будет фиксировать их нарушения. Однако прогресс движется и в этом направлении. Компания Volvo, к примеру, планирует ставить в салоне следящие за поведением водителя камеры в рамках своей программы Vision 2020. Это неплохой рекламный ход для тех, кто ставит безопасность превыше всего. Программа Vision 2020 гласит, что с этого года в автомобилях марки никто не погибнет и не получит тяжелых травм в результате ДТП.
Однако прогресс движется и в этом направлении. Компания Volvo, к примеру, планирует ставить в салоне следящие за поведением водителя камеры в рамках своей программы Vision 2020. Это неплохой рекламный ход для тех, кто ставит безопасность превыше всего. Программа Vision 2020 гласит, что с этого года в автомобилях марки никто не погибнет и не получит тяжелых травм в результате ДТП.
Самый доступный автомобиль, оснащенный этой системой
Простые устройства вроде алкозамка или датчика СО2 в салоне могут стоять, в том числе, и в относительно недорогих авто вроде того же Hyundai Genesis. Умные помощники распространены в машинах классом выше — большинство моделей Mercedes или Volvo. Системы слежения с видеокамерами пока остаются редкостью, так как не все готовы переплачивать за такую опцию, а законодательных требований о ее наличии нет.
Контроль усталости оператора от компании «Восточная Техника»
Система контроля усталости оператора DSS
Система DSS создаёт сигналы тревоги для оператора и отправляет сообщение диспетчеру для оценки события и принятия необходимых мер, когда обнаруживаются потенциально опасные уровни усталости. Система состоит из нескольких модулей и находится в кабине оператора.
По статистике, 60–65% несчастных случаев на производстве происходит из-за усталости операторов. В настоящее время на рынке представлено большое количество подобных технологий, но почти все они требуют от водителя/оператора носить датчик на теле, специальные очки или электроды.
Эффект достигаемый от использования системы DSS: происшествия, связанные с усталостью и отвлечением внимания, снижаются на 90%!
Система DSS генерирует сигналы тревоги в потенциально опасных ситуациях и не только защищает сонного водителя, но и создаёт общую безопасность на дорогах. Руководство предприятия может анализировать эффективное время работы водителей и пересматривать график работы.
Руководство предприятия может анализировать эффективное время работы водителей и пересматривать график работы.
Система абсолютно безопасна для оператора
Уровень излучения инфракрасного датчика, используемого для подсветки глаз оператора, составляет 1% от максимально допустимой величины, то есть на 2 порядка меньше.
Система не требует от оператора каких-либо действий
Нет необходимости носить специальные очки, одевать какие-то датчики на тело оператора. Система также не требует от оператора выполнения каких-либо действий, как например нажатие кнопки через определённый момент времени.
Система не предназначена для слежки за действиями оператора
Видеоданные передаются только за 5 секунд до обнаружения усталости и 5 секунд после, только для того, чтобы диспетчер смог убедиться, что оператор в состоянии продолжать работу, и что сигнал системы не был случайным/ошибочным.
Очки оператора
Система позволяет распознавать усталость и засыпание оператора, если оператор носит затемнённые очки или очки с диоптриями.
Установка системы
Установка системы производится таким образом, что это никак не влияет на работу оператора, нет никаких дополнительных частей, которые могут уменьшить рабочее пространство оператора или как-то его отвлекать (мигающие кнопки и т.п.)
Все новые Jaguar получат систему контроля усталости водителя
Чтобы улучшить качество поездок и сделать их безопаснее, у Jaguar разработана система контроля степени усталости водителя (Driver Condition Monitor), которая определяет признаки сонливости и предупреждает об этом. Теперь система доступна в базовом оснащении всех кроссоверов Jaguar – E-PACE, F-PACE, электрического I-PACE – и в обновленном Jaguar XE, и в дальнейшем войдет в стандартное оснащение на всем модельном ряду Jaguar.
Современный стиль жизни и напряженные ежедневные поездки существенно повышают уровень стресса человека. Один из восьми водителей в Великобритании признается, что хотя бы раз в жизни засыпал за рулем. Такие случаи становятся причиной около 25% аварий с летальным исходом.
Система контроля степени усталости водителя анализирует широкий ряд показателей, многие из которых обновляются тысячу раз в секунду, в частности, отклик системы электроусилителя руля, нажатие на педали газа и тормоза и общее поведение водителя во время управления автомобилем. Сложные алгоритмы изучают полученные данные, чтобы определить момент, когда водитель устает. Распознав признаки сонливости, система предлагает остановиться и отдохнуть. В этом случае на приборной панели автомобиля высвечивается иконка чашки с кофе, которая сопровождается дополнительным звуковым сигналом.
Помимо системы контроля степени усталости, владельцам Jaguar доступен ряд других передовых систем помощи водителю – система автономного экстренного торможения (Automated Emergency Braking), система удержания полосы движения (Lane Keep Assist), круиз-контроль с ограничителем скорости, передние и задние датчики парковки и камера заднего вида.
Эдмунд Кинг, директор фонда Charitable Trust: «Статистика по количеству водителей, засыпающих во время поездки, шокирует. Поэтому необходимы любые меры, которые помогут снизить риск утомления за рулем – такие, как система контроля степени усталости водителя. Единственное лекарство от усталости – это отдых. Поэтому если водитель чувствует хотя бы малейшие признаки утомления или получает предупреждение системы, ему необходимо остановиться в ближайшем безопасном месте, чтобы отдохнуть или даже немного вздремнуть».
Поэтому необходимы любые меры, которые помогут снизить риск утомления за рулем – такие, как система контроля степени усталости водителя. Единственное лекарство от усталости – это отдых. Поэтому если водитель чувствует хотя бы малейшие признаки утомления или получает предупреждение системы, ему необходимо остановиться в ближайшем безопасном месте, чтобы отдохнуть или даже немного вздремнуть».
Дэвид Уилли, директор Jaguar по автоматизированным технологиям: «Бренд Jaguar постоянно следит за передовыми достижениями в области безопасности транспортных средств и разрабатывает инновационные технологии, способные сделать управление автомобилем более комфортным и безопасным. Система контроля степени усталости водителя наряду с другими системами помощи водителю доступна уже в базовых комплектациях на всех моделях Jaguar».
Bosch представила систему контроля состояния водителя
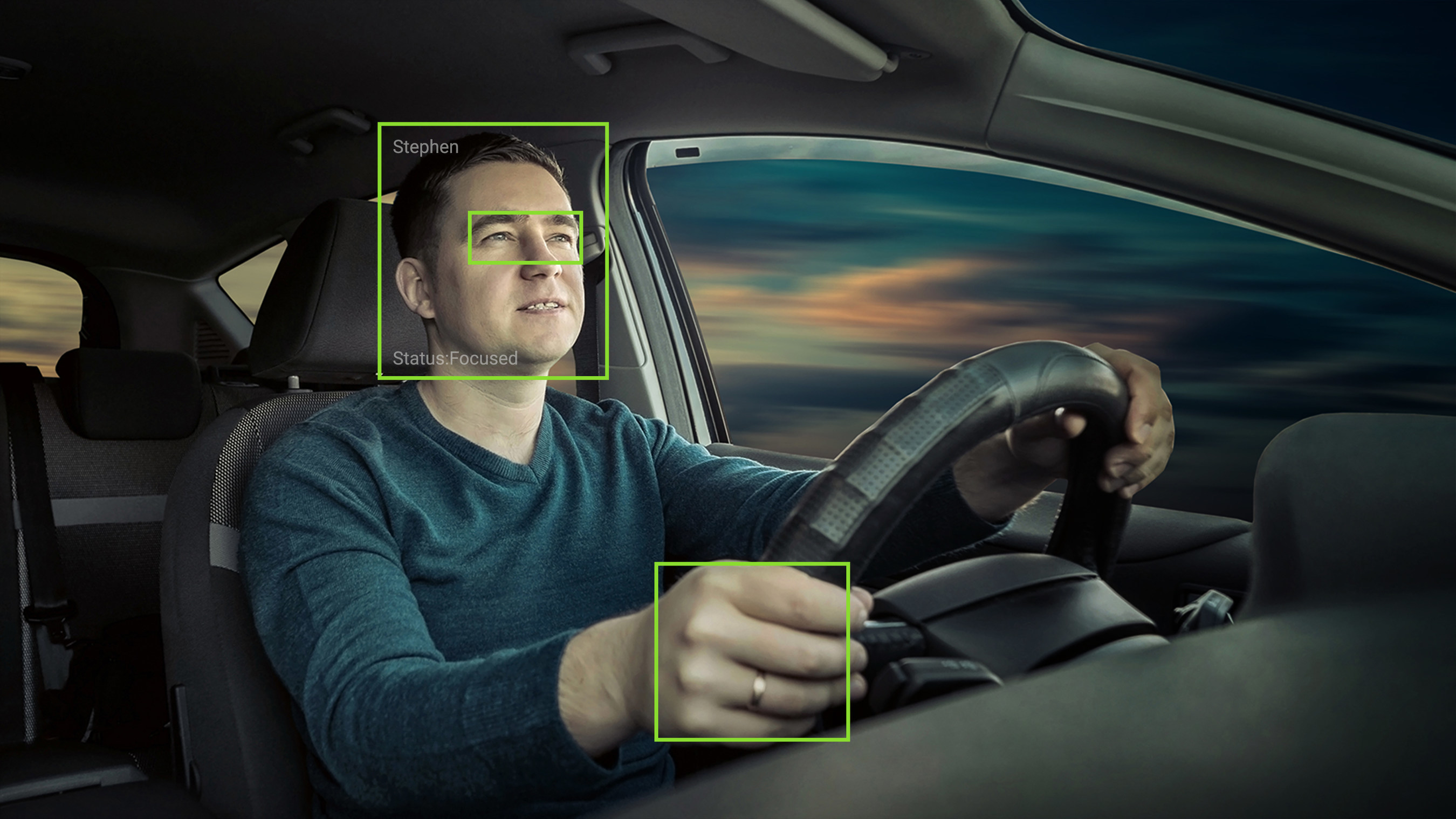
Засыпание, снижение концентрации, не пристегнутый ремень безопасности – многие события, происходящие внутри автомобиля, могут иметь далеко идущие последствия. Для предотвращения критических ситуаций при вождении и возможных несчастных случаев планируется интегрировать в автомобили датчики, которые будут наблюдать за салоном и контролировать состояние водителя и других пассажиров. Компания Bosch разработала новую систему контроля состояния водителя на основе камер и средств искусственного интеллекта.
Для предотвращения критических ситуаций при вождении и возможных несчастных случаев планируется интегрировать в автомобили датчики, которые будут наблюдать за салоном и контролировать состояние водителя и других пассажиров. Компания Bosch разработала новую систему контроля состояния водителя на основе камер и средств искусственного интеллекта.
Разработанная Bosch система может быть запущена в производство в 2022 году. К этому времени в планах Евросоюза внести такие технологи безопасности, как система предупреждения о снижении концентрации и засыпании, в перечень стандартного оснащения для всех новых автомобилей. По прогнозам Комиссии ЕС, за период до 2038 года благодаря новым требованиям к оснащению автомобилей средствами активной безопасности, около 25 000 жизней могут быть спасены, и не менее 140 000 тяжелых травм предотвращены. Средства слежения за состоянием водителя и пассажиров также станут шагом к решению глобальной задачи создания системы автоматизированного вождения. Если в процессе движения происходит передача управления и ответственности за вождение от автопилота водителю, система автоматического вождения должна удостовериться, что водитель в момент передачи не спит, не читает газету или не отправляет электронную почту.
Bosch разработала систему контроля, которая распознает признаки усталости водителя, предупреждает об опасности и оказывает помощь в управлении. Встроенная в руль камера направлена на лицо водителя, а программное обеспечение распознает положение век, и реагирует, если человек закрывает глаза. Реакция предусмотрена и на тот случай, когда водитель отвлекся от дороги и повернул голову к пассажирам на переднем или заднем сиденье. Благодаря ИИ система делает выводы из полученной информации: она может предупредить об опасности невнимательного водителя, порекомендовать сделать остановку для отдыха, а, в некоторых случаях, может даже снизить скорость движения: точная реакция может зависеть от настроек, выбранных автопроизводителем, и законодательных требований в части правил дорожного движения в регионе.
Планируется, что Европейская программа тестирования новых автомобилей (NCAP) будет учитывать их в рейтинге безопасности транспортных средств с 2025 года. Полученная при мониторинге информация обрабатывается только программным обеспечением, установленным в самом автомобиле, не хранится и не передается третьим лицам.
Кроме того, данная система следит не только за водителем, но и за пассажирами. Для этого камера, установленная над или под зеркалом заднего вида, контролирует весь салон. Система способна следить за тем, пристегнуты ли дети или взрослые пассажиры задних рядов ремнями безопасности, и предупреждает водителя, если видит, что ремни не задействованы. Если кто-то из сидящих сзади слишком сильно наклонился вперед, сел полубоком или положил ноги на сиденье, подушки безопасности и натяжитель ремня не смогут должным образом защитить человека в случае аварии. Камера слежения будет определять положение тела пассажира, и контролировать параметры срабатывания систем пассивной безопасности так, чтобы обеспечить наилучшую защиту. Система также предотвратит срабатывание подушки безопасности, если сиденье пассажира занято детским креслом.
В дополнение ко всему, камера наблюдения системы позволяет определить, кто собирается вести машину, и отрегулировать зеркало заднего вида, положение сидения, высоту рулевого колеса и параметры информационно-развлекательной системы в соответствии с личными предпочтениями водителя. Также камеру можно задействовать для управления настройками и проигрыванием мультимедиа с помощью жестов или взгляда.
Также камеру можно задействовать для управления настройками и проигрыванием мультимедиа с помощью жестов или взгляда.
Система контроля бодрствования SleepAlert | Транзит12
ДЛЯ ЧЕГО ВАМ НУЖНА СИСТЕМА SLEEP ALERT
Усталость водителя в процессе управления транспортным средством – это очень серьезная проблема. В особенности для профессиональных водителей, водителей транспортных компаний, компаний, занимающихся перевозками грузов. Из-за усталости и засыпания за рулем происходят тысячи аварий каждый год. Уставшие водители являются источником опасности как для самих себя, так и для других участников дорожного движения.
Каждый опытный водитель-дальнобойщик хорошо знает, что при движении по трассам, особенно на которых поток транспорта практически отсутствует, на водителя накатывает прилив усталости, который появляется при недостатке подвижности за рулем, убаюкивающем, размеренном движении автомобиля по дороге с единообразным ландшафтом на протяжении продолжительного времени.
Среди водителей такая усталость называется «дорожный гипноз». И действительно, под его воздействием, водитель словно впадает в состояние транса и в какой-то момент уже не способен среагировать на критическое изменение ситуации на дороге. Этот вид усталости отличается от обычного утомления, при котором возвращение организма к обычным показателям происходит достаточно долго. Для восстановления скорости реакции после «гипноза» организму не требуется много времени.Обычно из этого состояния водитель выходит сразу при изменении дорожной обстановки. Но, монотонностью езды может быть вызван и более коварный побочный эффект – засыпание за рулем, который может проявиться в том случае, если у водителя уже присутствует состояние небольшой физической усталости. Говорить об опасности этого явления – излишне. Профессиональные водители-дальнобойщики, зная о таких особенностях, стараются постоянно следить за своим состоянием. Именно поэтому, условия работы водителей, вынужденных проводить за рулем целый рабочий день, относятся к экстремальным условиям.
Статистика показывает, что порядка 80% ДТП на ровных участках дороги происходит по причине того, что кто-то из водителей находился под влиянием монотонии. По данным Национальной Администрации по Безопасности Дорожного Движения США, усталость водителей является причиной 100 000 аварий, 1 550 смертей, 71 000 травм разной степени тяжести и финансовых потерь в размере более 1,25 миллиардов долларов ежегодно.
Люди по-разному переносят воздействие монотонии. Известно, что хорошую устойчивость к этому состоянию имеют лишь только 3% водителей, а страдают и наиболее сильно подвержены влиянию этого фактора порядка 85%. Но в современном мире технологии не стоят на месте, и людей, работа которых требует постоянного повышенного внимания, мы с удовольствием познакомим с одним из самых инновационных способов борьбы с проявлениями «дорожного гипноза» на сегодняшний день. Прибор, который мы с удовольствием представляем вашему вниманию, удобен и крайне прост в использовании, не требует подключения к смартфону или каким-либо другим источникам. При этом очень эффективно может использоваться в любой профессиональной деятельности, где требуется повышенное внимание и концентрация. От водителей, машинистов и пилотов до офисных работников и студентов. Теперь, чтобы повысить уровень своего внимания и безопасности не требуется долгих изнурительных тренингов. Вам поможет уникальный инновационный инструмент для борьбы с монотонией.
При этом очень эффективно может использоваться в любой профессиональной деятельности, где требуется повышенное внимание и концентрация. От водителей, машинистов и пилотов до офисных работников и студентов. Теперь, чтобы повысить уровень своего внимания и безопасности не требуется долгих изнурительных тренингов. Вам поможет уникальный инновационный инструмент для борьбы с монотонией.
ПРИНЦИП РАБОТЫ СИСТЕМЫ NEUROMATIX SLEEP ALERT
Система оснащена лобным электродом, который получает ЭЭГ и ЭМГ данные.
На основе ЭМГ данных распознается частота и закономерность морганий. На основе алгоритма анализа по этим данным делается вывод о накоплении монотонии, утомления пользователя. В случае, если утомление становится критическим и может привести к потере контроля и засыпанию, система сигнализирует при помощи звукового сигнала служебного модуля кепки и вибрации браслета.
На основе ЭЭГ данных распознаются состояния рассеянности, утомления, накопления монотонии, потери собранности, концентрации на внешних процессах. Когда система распознает такие состояния, как критические и(или) приближающиеся к засыпанию, то происходит оповещение пользователя звуковым сигналом служебного модуля кепки и вибрацией браслета.
Когда система распознает такие состояния, как критические и(или) приближающиеся к засыпанию, то происходит оповещение пользователя звуковым сигналом служебного модуля кепки и вибрацией браслета.
Как работает систетма контроля бодрствования водителя SleepAlert Cистема контроля бодрствования водителя Sleep Alert очень проста в использовании. Следуйте приведенным ниже простым рекомендациям, и вы обеспечите свою безопасность за рулем. 1. Оденьте кепку. 2. Убедитесь, что лобный датчик плотно прилегает ко лбу. Убедитесь, что между электродом и кожей головы не попали волосы. Используйте ремешок для настройки степени прилегания датчика к коже лба. Не стоит обеспечивать слишком сильное давление, достаточно убедиться в плотном прилегании. Это позволит долговременно использовать устройство без какого-либо неудобства. 3. Разместите ушную клипсу кепки на мочке уха. Убедитесь в плотности контакта и в том, что вам удобно. Убедитесь, что волосы не попали между электродами ушной клипсы и кожей мочки уха.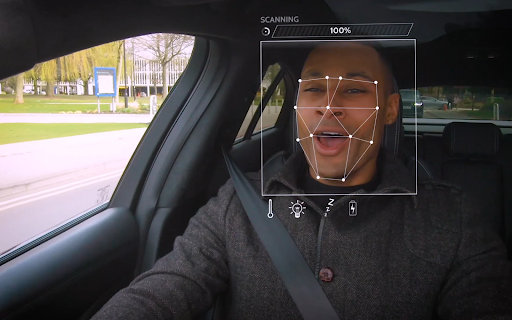 4. Оденьте браслет на любую руку, это не имеет значения. 5. Нажатием на кнопку служебного модуля на кепке включите питание. 6. Включите браслет нажатием на кнопку. Синхронизация браслета и служебного модуля кепки осуществляется автоматически. В процессе поиска служебного модуля кепки синий индикатор браслета будет мигать. Как только он перестанет мигать и начнет светиться синим постоянно, синхронизация завершена, и браслет готов к работе. 7. В момент включения индикатор на служебном модуле кепки начнет поочередно мигать красным, зеленым и синим цветом. Такая индикация означает, что система калибруется и ждет сигналы мозговой и ЭМГ активности. Как только сигнал получен и система готова к работе, раздастся одиночный звуковой сигнал и индикатор будет светиться синим цветом. В случае потери сигнала, раздастся звуковой сигнал, который не сопровождается вибрацией браслета. В этом случае нужно проверить правильность размещения электродов на лбу и ухе. После выполнения описанных выше действий система готова к работе.
4. Оденьте браслет на любую руку, это не имеет значения. 5. Нажатием на кнопку служебного модуля на кепке включите питание. 6. Включите браслет нажатием на кнопку. Синхронизация браслета и служебного модуля кепки осуществляется автоматически. В процессе поиска служебного модуля кепки синий индикатор браслета будет мигать. Как только он перестанет мигать и начнет светиться синим постоянно, синхронизация завершена, и браслет готов к работе. 7. В момент включения индикатор на служебном модуле кепки начнет поочередно мигать красным, зеленым и синим цветом. Такая индикация означает, что система калибруется и ждет сигналы мозговой и ЭМГ активности. Как только сигнал получен и система готова к работе, раздастся одиночный звуковой сигнал и индикатор будет светиться синим цветом. В случае потери сигнала, раздастся звуковой сигнал, который не сопровождается вибрацией браслета. В этом случае нужно проверить правильность размещения электродов на лбу и ухе. После выполнения описанных выше действий система готова к работе. В процессе вождения или иного монотонного занятия система анализирует в реальном времени ЭЭГ сигналы пользователя. На их основе делается вывод о состоянии монотонии, потенциальной возможности уснуть, войти в состояние рассеянности, потерять контроль. Так же лобный электрод получает и ЭМГ сигналы, по которым определяется частота и закономерность морганий пользователя. При наступлении, приближении к такому нежелательному состоянию, система извещает пользователя звуковыми сигналами, которые воспроизводятся служебным модулем кепки и происходит вибрация браслета.
Такого рода сигналы позволяют пользователю поддерживать состояние бодрствования. При этом, если система начинает срабатывать с частотой 1 раз в 10 минут или чаще, то мы рекомендуем прекратить текущую деятельность (вождение, работа и т.д.) и обеспечить организму достаточный сон и отдых). ВАЖНОЕ ПРЕИМУЩЕСТВО! Система контроля бодрствования водителя Sleep Alert опирается на ЭЭГ и ЭМГ данные. Поэтому на работу системы и ее результативность никак не влияют такие факторы, как положение тела пользователя, положение головы, движения головы или тела, движения транспортного средства или места осуществления активности.
В процессе вождения или иного монотонного занятия система анализирует в реальном времени ЭЭГ сигналы пользователя. На их основе делается вывод о состоянии монотонии, потенциальной возможности уснуть, войти в состояние рассеянности, потерять контроль. Так же лобный электрод получает и ЭМГ сигналы, по которым определяется частота и закономерность морганий пользователя. При наступлении, приближении к такому нежелательному состоянию, система извещает пользователя звуковыми сигналами, которые воспроизводятся служебным модулем кепки и происходит вибрация браслета.
Такого рода сигналы позволяют пользователю поддерживать состояние бодрствования. При этом, если система начинает срабатывать с частотой 1 раз в 10 минут или чаще, то мы рекомендуем прекратить текущую деятельность (вождение, работа и т.д.) и обеспечить организму достаточный сон и отдых). ВАЖНОЕ ПРЕИМУЩЕСТВО! Система контроля бодрствования водителя Sleep Alert опирается на ЭЭГ и ЭМГ данные. Поэтому на работу системы и ее результативность никак не влияют такие факторы, как положение тела пользователя, положение головы, движения головы или тела, движения транспортного средства или места осуществления активности. Это создает существенные удобства для использования системы в самых широких областях. Элементы системы оборудованы встроенными аккумуляторами, что обеспечивает экономию на сменных элементах питания. Полной зарядки аккумулятора хватает на срок 6-7 часов. Время полной зарядки аккумуляторов составляет 1 час.
Это создает существенные удобства для использования системы в самых широких областях. Элементы системы оборудованы встроенными аккумуляторами, что обеспечивает экономию на сменных элементах питания. Полной зарядки аккумулятора хватает на срок 6-7 часов. Время полной зарядки аккумуляторов составляет 1 час.
Инновационная система контроля бодрствования водителя
Инновационная система контроля бодрствования водителя
Серьезной проблемой для водителей является усталость в процессе управления транспортным средством. В особенности для профессиональных водителей, водителей транспортных компаний, компаний, занимающихся перевозками грузов. Из-за усталости и засыпания за рулем происходят тысячи аварий каждый год. Уставшие водители являются источником опасности как для самих себя, так и для других участников дорожного движения.
При совместной работе научной команды «Научно-исследовательской лаборатории «Алгоритмы и системы потоковой обработки данных» и специалистов в области нейрофизиологии компании ООО «Нейроматикс» был реализован инновационный проект «Система контроля и бодрствования SleepAlert 2. 0».
0».
Научная команда из 10 человек, под руководством Алексея Бойкова разработала аппаратно-программный комплекс контроля бодрствования водителя Sleep Alert 2.0, назначением которого является контроль бодрствования человека на основе биоэлектрических сигналов, получаемых с поверхности кожи головы пользователя неинвазивным методом. Срок реализации проекта: 2017г.-2018г.
Основные принципы работы данного комплекса:
На основе ЭМГ данных распознается частота и закономерность морганий. На основе алгоритма анализа по этим данным делается вывод о накоплении монотонии, утомления пользователя. В случае, если утомление становится критическим и может привести к потере контроля и засыпанию, система сигнализирует при помощи звукового сигнала служебного модуля кепки и вибрации браслета.
На основе ЭЭГ данных распознаются состояния рассеянности, утомления, накопления монотонии, потери собранности, концентрации на внешних процессах. Когда система распознает такие состояния, как критические и(или) приближающиеся к засыпанию, то происходит оповещение пользователя звуковым сигналом служебного модуля кепки и вибрацией браслета.
Проект состоит из двух основных частей: разработки носимого беспроводного устройства и разработки комплекса алгоритмов для определения функционального состояния водителя по физиологическим показателям, снимаемым в режиме реального времени.
Носимое устройство оборудовано 5 налобными электродами для измерения электроэнцефалограммы (ЭЭГ), электромиограммы (ЭМГ) и пульсовой волны, а также инерциальным датчиком для измерения параметров движений головы водителя. Предобработка данных с датчиков и определение состояние водителя также осуществляется на устройстве.
Комплекс разрабатываемых алгоритмов включает в себя различные алгоритмы, определяющие состояние водителя на основании полученных с устройства данных. На данном этапе работы разработан алгоритм определения функционального состояния человека на основе параметров морганий, получаемых из сигнала ЭЭГ.
В данный момент производится переработка конструктива устройства с целью получения форм-фактора, позволяющего части устройства, содержащей электроды, быть спрятанной под головной убор. В дальнейшим необходимо в ходе проведения исследовательских испытаний собрать новую базу данных для разработки комплекса алгоритмов на основе расширенного числа показателей (интенсивность ЭЭГ-спектра, ЧСС, параметры движения головы).
В дальнейшим необходимо в ходе проведения исследовательских испытаний собрать новую базу данных для разработки комплекса алгоритмов на основе расширенного числа показателей (интенсивность ЭЭГ-спектра, ЧСС, параметры движения головы).
Устройство Sleep Alert 1.0
Прототип аппаратно-программный комплекс Sleep Alert 2.0
Аппаратно-программный комплекс Sleep Alert 2.0 обеспечит безопасность на транспорте; контроль состояния оператора опасных производств, на пример: нефтяная и энергетическая промышленность и др.; обеспечит безопасность и контроль с целью повышения эффективности процессов; соберет и систематизирует статистические данные об усталости, рассеянности, невнимательности, засыпании сотрудников в процессе выполнения задач, связанных с опасностью проявления монотонии.
Технические характеристики
• Мобильное приложение, открытый SDK для разработчиков;
• 5 налобных электродов(3- для ЭЭГ, 2 -а для РЭГ), без ушной клипсы;
• Сухие контактные и бесконтактные активные электроды;
• 16-битный АЦП, частота дискретизации ЭЭГ 1 кГц, обработка данных на микроконтроллере STM32;
• Время автономной работы от аккумуляторной батареи должно быть не менее 12 часов;
• Интерфейс Bluetooth 4. 0;
0;
• Носимое беспроводное устройство в форм-факторе головного убора.
Система контроля усталости водителя — Воронеж — Предметный указатель Камелот
По данным немецких страховщиков, четверть всех ДТП в Германии происходит из-за водителей, уснувших за рулем во время движения. В США исследования показали, что усталый водитель гораздо больше отвлекается от дороги и чаще нарушает правила. По общемировой статистике пятая часть всех аварий случается по вине уставшего или уснувшего водителя. В России эта цифра не меньше, причем ДТП происходят в основном на трассе во время долгих автопутешествий.Чем опасна усталость водителя
Психологи объясняют усталость на дороге влиянием «гипноза автомагистрали». По их мнению, продолжительное вождение способно вызвать состояние транса, в котором водитель не может быстро и адекватно реагировать на форс-мажорные ситуации. При движении по однообразной местности «дорожный гипноз» опасен тем, что развивает желание ехать быстрее. Зачастую водитель не понимает всю рискованность состояния микросна, в которое впадает: ему кажется, что он всего лишь моргнул. На самом деле закрытые на несколько секунд (до минуты) глаза — это точно потеря своей полосы движения и как минимум пробуждение в кювете.
При движении по однообразной местности «дорожный гипноз» опасен тем, что развивает желание ехать быстрее. Зачастую водитель не понимает всю рискованность состояния микросна, в которое впадает: ему кажется, что он всего лишь моргнул. На самом деле закрытые на несколько секунд (до минуты) глаза — это точно потеря своей полосы движения и как минимум пробуждение в кювете.Если вы собираетесь ехать на большие расстояния, например, путешествовать на машине по Европе, возьмите с собой попутчиков. Хорошо, когда на соседнем сидении есть человек, который развлечет разговором и проследит, чтобы вы не заснули и не потеряли управление. Если же такого человека нет, на помощь придет система контроля усталости водителя.
Изобретатели и производители
Система против засыпания водителя была впервые разработана в 70-е годы прошлого века в Японии — первым патент на устройство, приблизительно похожее на современную систему контроля усталости водителя, получил концерн Nissan. С тех пор устройство изменялось, разрабатывались новые технологии, и сегодня у большинства зарубежных автопроизводителей существует аналог этой системы.
Компания Ford разработала систему предупреждения водителя Driver Alert, Mercedes-Benz — технологию Attention Assist. Volkswagen — систему обнаружения усталости водителя Fatigue Detection System, а Volvo — систему оповещения водителя Driver Alert Control.
Эти системы предусмотрены производителем и включены в базовую комплектацию последних моделей автомобилей. Среди устройств, которые можно установить в машину дополнительно, в России в последнее время популярность приобретают наблюдающий за состоянием век водителя гаджет Vigo и портативный монитор бдительности Anti Sleep Pilot. Их пока что можно купить только в зарубежных интернет-магазинах.
Как это работает
Все перечисленные устройства работают по двум основным принципам. Первая группа устройств используется в основном японскими автопроизводителями, а также включает Vigo и Anti Sleep Pilot. Эти устройства осуществляют контроль усталости водителя, учитывая мимику и жесты человека за рулем. В салоне установлена специальная камера, изображение с нее обрабатывает процессор, который контролирует широту открытия глаз водителя, частоту поворотов головы, зевки и другие действия, отвлекающие от дороги. Если водитель засыпает, то система разбудит его звуковым сигналом и вибрацией руля.
Если водитель засыпает, то система разбудит его звуковым сигналом и вибрацией руля.Вторая группа технологий ориентируется исключительно на действия водителя и используется на авто Mercedes-Benz, Volvo, Volkswagen, Ford и Audi. Усталость водителя определяется с помощью специальных датчиков, которые учитывают целый ряд факторов: манеру езды и характер движения, время суток и время в пути, частоту использования внутрисалонных систем, например, магнитолы, системы кондиционирования и т. д. Если в поведении водителя есть отклонения, система предложит ему отдохнуть — на приборной панели появится изображение кофейной чашки. Правда, такая система распознавания усталости водителя отличается у разных производителей. Например, в основе принципа работы Driver Alert Control автоконцерна Volvo лежит контроль за соблюдением одной полосы движения на дороге. По-другому ведет себя на дороге Attention Assist. Технология анализирует интенсивность и оправданность поворотов руля.
Система в Воронеже
Система отлично прижилась за границей и сейчас приобретает популярность в России и в нашем городе в частности. Купить автомобиль с системой контроля усталости водителя можно у официальных дилеров Mercedes и Nissan в Воронеже.
Купить автомобиль с системой контроля усталости водителя можно у официальных дилеров Mercedes и Nissan в Воронеже.Понятно, что никакая электроника полностью избавить от опасности не сможет, поэтому, наряду с использованием системы контроля усталости, самостоятельно следите за собой. В первую очередь стоит соблюдать режим — чтобы сохранить силы и рассудок, водитель не должен работать на износ, максимальное время за рулем — 8 часов, как и рабочий день в офисе. Кроме этого, вам потребуются пяти-десятиминутные перерывы каждые 150-200 километров пути, просто чтобы размяться и развеяться. Так вы снизите риск заснуть, а использование системы контроля усталости вообще сведет его к нулю. Вопрос, какая из перечисленных систем эффективнее остальных, пока открыт, и ответ на него мы сможем получить только со временем.
Hi-Tech Средства управления движением | Drive Master Mobility
Система управления высокотехнологичным вождением DM / IDS Drive-Master и IDS производят, распространяют и устанавливают высокотехнологичные первичные и вторичные элементы управления для людей с ограниченными возможностями, которые легко установить и легко использовать. Мы применяем новейшие технологии, чтобы сделать установку и эксплуатацию максимально удобной, при этом сохраняя стандарты безопасности и надежности, которых наши клиенты ожидают от лидеров индустрии высокотехнологичной мобильности.
Мы применяем новейшие технологии, чтобы сделать установку и эксплуатацию максимально удобной, при этом сохраняя стандарты безопасности и надежности, которых наши клиенты ожидают от лидеров индустрии высокотехнологичной мобильности.
PGB Power Gas and Brake
Система DM / IDS PGB управляет педалями газа и тормоза OEM (производителя оригинального оборудования) дистанционно и без усилий. PGB можно настроить так, чтобы рычаг двигался вперед для ускорения и назад для торможения или наоборот. Доступны различные ортопедические приспособления для управления PGB, включая однорычажный, Т-образный и трехштырьковый. Контроллер PGB можно легко разместить в зоне действия пользователя для оптимального комфорта и работы.Рычаг PGB можно комбинировать с штифтовым переключателем для управления находящимися в движении вторичными частями с помощью системы визуального / звукового сканирования DM / IDS VAS.
Система дистанционного электрического рулевого управления RESS
Система DM / IDS RESS представляет собой дистанционно устанавливаемое рулевое колесо малого диаметра, для работы которого требуются минимальные усилия и небольшой диапазон движений. Его можно установить в любом месте кабины водителя, чтобы пользователю было удобно и безопасно работать. RESS имеет возможность установки на несколько осей, поэтому пользователь может управлять транспортным средством из горизонтального положения или под любым углом.Доступны колеса трех размеров: 5, 7 или 10 дюймов. Доступны различные ортопедические приспособления для работы с RESS, включая ручку, одинарный и трехштырьковый. Систему можно легко вернуть к штатному рулевому колесу, просто нажав и удерживая кнопку во время зажигания / запуска автомобиля. RESS оснащен резервной системой управления и контроля.
Его можно установить в любом месте кабины водителя, чтобы пользователю было удобно и безопасно работать. RESS имеет возможность установки на несколько осей, поэтому пользователь может управлять транспортным средством из горизонтального положения или под любым углом.Доступны колеса трех размеров: 5, 7 или 10 дюймов. Доступны различные ортопедические приспособления для работы с RESS, включая ручку, одинарный и трехштырьковый. Систему можно легко вернуть к штатному рулевому колесу, просто нажав и удерживая кнопку во время зажигания / запуска автомобиля. RESS оснащен резервной системой управления и контроля.
Консоль сенсорного экрана планшета PROXIMA
Консоль сенсорного экрана планшета DM / IDS Proxima — это планшет, который будет управлять зажиганием, пуском, переключателем силового привода, стояночным тормозом, электрическими стеклоподъемниками, дверными замками, радио, HVAC и всеми другими вспомогательными функциями автомобиля.Его можно установить как можно ближе к водителю для быстрого и легкого доступа. Программа Proxima Tablet обменивается данными с автомобилем через Bluetooth и оснащена проводной дополнительной кнопкой зажигания / запуска и переключателем силового переключателя для резервного копирования. Возьмите с собой планшет Proxima и используйте его для электронной почты и просмотра веб-страниц.
Программа Proxima Tablet обменивается данными с автомобилем через Bluetooth и оснащена проводной дополнительной кнопкой зажигания / запуска и переключателем силового переключателя для резервного копирования. Возьмите с собой планшет Proxima и используйте его для электронной почты и просмотра веб-страниц.
Система визуального / звукового сканирования VAS
DM / IDS VAS можно использовать в сочетании с сенсорным экраном Proxima или как отдельное устройство.VAS позволяет активировать работу находящихся в движении вторичных устройств с помощью переключателя с одним штифтом, установленного на ручном управлении, или поворотного переключателя, установленного на двери. Изначально можно запрограммировать от четырех до шести основных функций, требующих максимально быстрого доступа, таких как левый поворот, правый поворот, звуковой сигнал, диммер. Дополнительные функции, такие как дворники, круиз, окна, громкость радио и т. Д., Можно программировать и переключать с помощью небольшого 3-дюймового ЖК-экрана, установленного в левом углу приборной панели для безопасного просмотра. Нажмите и удерживайте кнопку активации, и через несколько секунд функции переключатся и отобразятся на ЖК-экране.Как только вы увидите дисплей желаемой функции, нажмите кнопку еще раз, и она активирует эту функцию.
Нажмите и удерживайте кнопку активации, и через несколько секунд функции переключатся и отобразятся на ЖК-экране.Как только вы увидите дисплей желаемой функции, нажмите кнопку еще раз, и она активирует эту функцию.
GEN II (модифицированная электрическая система рулевого управления)
DM / IDS GEN II снижает усилие, необходимое для управления автомобилем, оборудованным электрическим рулевым управлением OEM (производитель оригинального оборудования). Усилие можно уменьшить с 0 до 100 процентов. Стандартное снижение усилий при минимальных усилиях будет составлять 50%, при нулевых усилиях — 100%, однако нашу систему можно точно настроить на требуемый точный процент: 34%, 65%, 86% и т. Д.Наше поколение GEN II оснащено тестовым режимом, резервной батареей и системой мониторинга транспортного средства, которая помогает отслеживать, предотвращать и предупреждать водителя, если может произойти какая-либо неисправность. Система резервного копирования позволит им безопасно съехать на обочину дороги. GEN II также оснащен функцией возврата в штатный режим рулевого управления. Это позволяет вернуть усилие на рулевое управление к исходному усилию OEM, чтобы другие водители не нуждались в уменьшенных или нулевых усилиях для безопасного и комфортного вождения.
GEN II также оснащен функцией возврата в штатный режим рулевого управления. Это позволяет вернуть усилие на рулевое управление к исходному усилию OEM, чтобы другие водители не нуждались в уменьшенных или нулевых усилиях для безопасного и комфортного вождения.
VEESS (электрическая система рулевого управления с регулируемым усилием)
DM / IDS VEESS позволяет оценщику / инструктору по вождению CDRS изменять усилие OEM-системы рулевого управления с электроприводом, пока они проводят фактическую оценку вождения клиента.Эта система специально разработана и доступна только для оценщика / инструктора CDRS. Усилие рулевого управления может быть уменьшено с 0 до 100 процентов по запросу с помощью ручного или установленного на приборной панели модуля управления. Просто наберите желаемое снижение усилия рулевого управления и нажмите кнопку, чтобы установить его. ЖК-дисплей покажет вам желаемое и текущее значение усилия. После выбора они будут одинаковыми.![]() Он также будет отображать усилие рулевого управления в фунтах давления, необходимое для управления транспортным средством.DM / IDS VEESS — бесценный инструмент, который может иметь любой CDRS при проведении оценки вождения.
Он также будет отображать усилие рулевого управления в фунтах давления, необходимое для управления транспортным средством.DM / IDS VEESS — бесценный инструмент, который может иметь любой CDRS при проведении оценки вождения.
EMC производит различные варианты первичного управления движением, предназначенные для управления газом и тормозом рулевого управления автомобиля. В прошлые годы мы разработали ряд независимых систем, таких как популярный электронный газовый тормоз EGB, цифровое рулевое управление DS-2000 и цифровой джойстик управления движением DIGIDRIVE.Сегодня мы производим единую систему управления — АЕВИТ. С новой технологией AEVIT доступно более десяти различных устройств ввода управления, отвечающих вашим потребностям. Каждый из этих различных управляющих входов может использоваться в сочетании с одними и теми же компонентами управляющего привода и выходными серводвигателями для создания системы, адаптированной к вашим потребностям.:no_upscale()/imgs/2019/05/14/16/3349888/7026135fdaf3ed1146a81e1c1566574e2e2a7f66.jpeg) Система первичного управления движением AEVIT обеспечивает легкое решение для управления заводскими органами управления газом, тормозом и рулевым управлением. Доступны различные уникальные интерфейсы для системы управления, которые могут быть установлены практически в любом месте в зоне водителя транспортного средства.Эти «устройства ввода», как их называют, имеют внешний вид заводских средств управления вождением, но разработаны специально для того, чтобы максимизировать ваши возможности. Как следует из аббревиатуры AEVIT, технология — это фундамент, на котором разработана эта замечательная система управления движением. AEVIT использует сложную конструкцию микропроцессора и современную сеть зон управления, чтобы преобразовать ваш механический вход в движение с помощью мощных выходных серводвигателей. Эти серводвигатели устанавливаются для управления заводскими педалями газа и тормоза, заводской рулевой колонкой или всеми тремя.Если вам нужен только газ и тормоза, или просто рулевое управление, или газ, тормоза, рулевое управление и , система AEVIT найдется для вас!
Система первичного управления движением AEVIT обеспечивает легкое решение для управления заводскими органами управления газом, тормозом и рулевым управлением. Доступны различные уникальные интерфейсы для системы управления, которые могут быть установлены практически в любом месте в зоне водителя транспортного средства.Эти «устройства ввода», как их называют, имеют внешний вид заводских средств управления вождением, но разработаны специально для того, чтобы максимизировать ваши возможности. Как следует из аббревиатуры AEVIT, технология — это фундамент, на котором разработана эта замечательная система управления движением. AEVIT использует сложную конструкцию микропроцессора и современную сеть зон управления, чтобы преобразовать ваш механический вход в движение с помощью мощных выходных серводвигателей. Эти серводвигатели устанавливаются для управления заводскими педалями газа и тормоза, заводской рулевой колонкой или всеми тремя.Если вам нужен только газ и тормоза, или просто рулевое управление, или газ, тормоза, рулевое управление и , система AEVIT найдется для вас!
| AEVIT Газ / Тормоз | AEVIT Системы рулевого управления | AEVIT Газ / Тормоз и рулевое управление |
Electronic Mobility Controls, LLC — мировой лидер в разработке и производстве адаптивных средств управления движением для людей с ограниченными возможностями. Мы предлагаем полную линейку первичных и вторичных средств управления движением. Наши продукты распространяются через сертифицированную дилерскую сеть, обученную установке и эксплуатации всего оборудования EMC.
Вторичные органы управления движением, производимые EMC, предназначены для управления функциями автомобиля, кроме газа, тормозов и рулевого управления. Мы предлагаем множество вариантов для самых разных транспортных средств. Наши органы управления можно приобрести как полную консольную систему, чтобы дополнить ваши основные средства управления движением, или их можно приобрести по отдельности.Например, если основная система управления движением AEVIT будет использоваться для управления газом / тормозом и / или функциями рулевого управления в автомобиле, мы рекомендуем «полную» консольную систему серии Gold. С другой стороны, если удаленный доступ требуется только для ограниченного числа дополнительных элементов управления движением, вы можете рассмотреть консольную систему серии Econo. Конечно, для любого применения могут быть желательны один или несколько дополнительных автономных продуктов. Независимо от того, требует ли ваше приложение голосовую активацию или работу с сенсорной панелью, EMC стремится удовлетворить ваши потребности!
Конечно, для любого применения могут быть желательны один или несколько дополнительных автономных продуктов. Независимо от того, требует ли ваше приложение голосовую активацию или работу с сенсорной панелью, EMC стремится удовлетворить ваши потребности!
| Консольная система управления серии Gold | Система управления серии Econo | Вспомогательные аккумуляторные системы | Smart Shift |
Drive-Master — сертифицированный продавец продукции Electronic Mobility Control.![]()
Drive-Master обеспечивает полную установку, интеграцию и обслуживание всех систем EMC.
| DigiVoice Активация голосом Переключатель | DigiTone Технология звуковой коммутации | Электрическая стояночная тормозная система |
| Системы управления подголовником с электроприводом | Две панели управления функциями | ОВК Системы отопления, вентиляции и охлаждения |
Проектирование интегрированной системы управления шасси транспортного средства с идентификацией поведения водителя
В этом документе представлена интегрированная стратегия управления шасси транспортного средства с идентификацией поведения водителя. Чтобы идентифицировать различные типы характеристик поведения водителя, была создана система сбора сигналов поведения водителя с использованием платформы моделирования в реальном времени dSPACE, а входные данные 30 тестовых водителей были собраны в условиях испытания с двойной сменой полосы движения. Затем характеристики поведения водителя были проанализированы и идентифицированы на основе предварительной модели оптимальной кривизны с помощью генетического алгоритма и метода нейронной сети. Используя его в качестве основы, с помощью метода прогнозирующего управления модели (MPC) была разработана интегрированная стратегия управления шасси с активным передним рулевым управлением (AFS) и прямым управлением моментом рыскания (DYC) с учетом характеристик водителя.Наконец, было проведено моделирование для проверки стратегии управления с помощью CarSim и MATLAB / Simulink. Результаты показывают, что предложенный метод позволяет системе управления регулировать свои параметры в соответствии с результатами идентификации поведения водителя, при этом значительно улучшаются характеристики управляемости и устойчивости транспортного средства.
Чтобы идентифицировать различные типы характеристик поведения водителя, была создана система сбора сигналов поведения водителя с использованием платформы моделирования в реальном времени dSPACE, а входные данные 30 тестовых водителей были собраны в условиях испытания с двойной сменой полосы движения. Затем характеристики поведения водителя были проанализированы и идентифицированы на основе предварительной модели оптимальной кривизны с помощью генетического алгоритма и метода нейронной сети. Используя его в качестве основы, с помощью метода прогнозирующего управления модели (MPC) была разработана интегрированная стратегия управления шасси с активным передним рулевым управлением (AFS) и прямым управлением моментом рыскания (DYC) с учетом характеристик водителя.Наконец, было проведено моделирование для проверки стратегии управления с помощью CarSim и MATLAB / Simulink. Результаты показывают, что предложенный метод позволяет системе управления регулировать свои параметры в соответствии с результатами идентификации поведения водителя, при этом значительно улучшаются характеристики управляемости и устойчивости транспортного средства.
1. Введение
В последние годы исследователи работают над улучшением показателей активной безопасности транспортных средств. С развитием технологии электронного управления появилось множество активных систем безопасности, таких как антиблокировочная тормозная система (ABS), противобуксовочная система (TCS), электронный контроль устойчивости (ESC), активное переднее рулевое управление (AFS) и рулевое управление всеми четырьмя колесами (4WS). были широко установлены на транспортных средствах, чтобы обеспечить более безопасное и стабильное вождение.Однако потенциальные конфликты между активными системами управления возрастают, когда они объединяются без координации [1–3]. Таким образом, было много попыток интегрировать подсистемы управления шасси, например, Integrated Chassis Control (ICC), Unified Chassis Control (UCC) и Vehicle Dynamics Management (VDM) [4–6]. Благодаря внедрению интегрированных систем управления взаимное влияние и взаимосвязь между динамическими подсистемами эффективно устраняются, а характеристики устойчивости транспортного средства значительно улучшаются.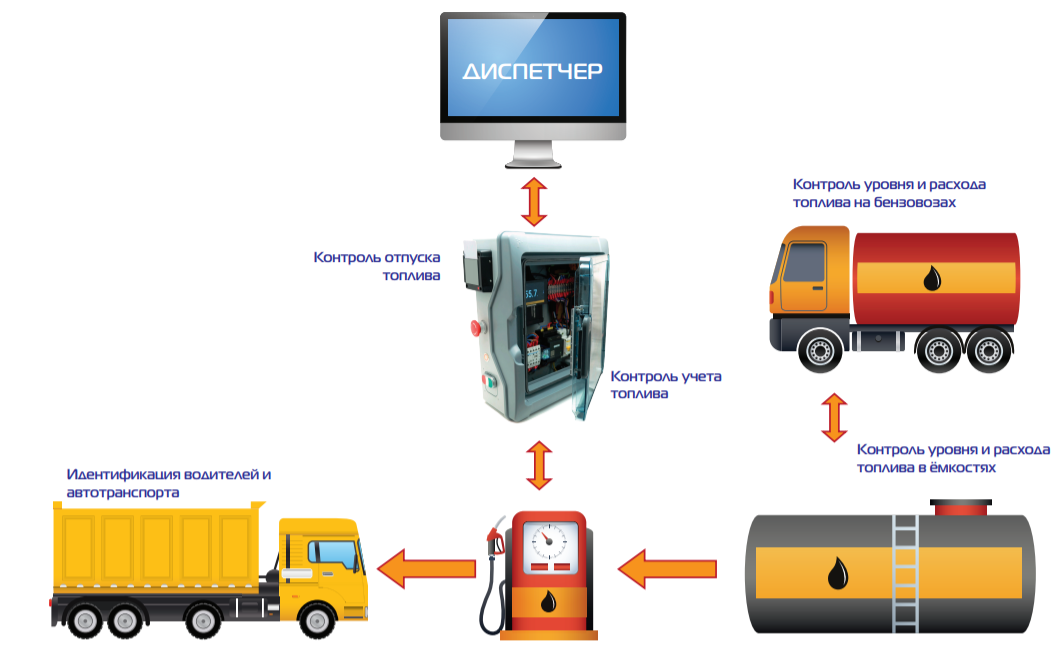 Тем не менее, интегрированные системы управления в настоящее время обычно проектируются в унифицированном режиме, без учета влияния, которое драйверы оказывают на системы управления. Фактически, водитель и активная система управления сильно связаны друг с другом при управлении транспортным средством. Согласно исследованию, спонсируемому Национальной администрацией безопасности дорожного движения (NHTSA) США, ошибка водителя составляет 90% и более всех зарегистрированных аварий [7]. Следовательно, характеристики человека-водителя должны быть задействованы в процессе разработки интегрированной системы управления.
Тем не менее, интегрированные системы управления в настоящее время обычно проектируются в унифицированном режиме, без учета влияния, которое драйверы оказывают на системы управления. Фактически, водитель и активная система управления сильно связаны друг с другом при управлении транспортным средством. Согласно исследованию, спонсируемому Национальной администрацией безопасности дорожного движения (NHTSA) США, ошибка водителя составляет 90% и более всех зарегистрированных аварий [7]. Следовательно, характеристики человека-водителя должны быть задействованы в процессе разработки интегрированной системы управления.
Роль человека-водителя как основного элемента управления в традиционной системе «водитель-транспортное средство» изучалась многими учеными и исследователями. Поведение водителя включает в себя ощущение, суждение, рассуждение, принятие решений и, наконец, управление транспортным средством для поворота, ускорения и торможения с сильной случайностью, адаптивностью, дискретностью и изменчивостью. В настоящее время исследования в основном проводятся в аспектах моделирования поведения водителя, выявления усталости, интеллектуального управления дорожным движением и передовых систем помощи водителю (ADAS) [8].
В настоящее время исследования в основном проводятся в аспектах моделирования поведения водителя, выявления усталости, интеллектуального управления дорожным движением и передовых систем помощи водителю (ADAS) [8].
Koh et al. представить модель гонщика с контролем скорости на основе угла скольжения шины, проанализировав взаимодействие транспортного средства с водителем при ограничении управляемости [9]. Miyajima et al. смоделированное поведение водителя, такое как поворот рулевого колеса или нажатие на педаль, с помощью модели смеси Гаусса (GMM) для определения различных типов водителей. По сравнению с методом, использующим необработанные сигналы срабатывания педали, предложенный метод спектрального анализа показывает гораздо лучшую точность [10]. Bolia et al. Предложена двухуровневая превью водительской модели рулевого управления.Внешний цикл фокусируется на следовании по пути, в то время как внутренний пытается уловить физическое поведение водителя [11]. Lin et al. использовал несколько сложных архитектур искусственных нейронных сетей для разработки моделей драйверов в системе «водитель-транспортное средство-среда» (DVE) [12]. Sathyanarayana et al. предложил активную систему транспортного средства «с учетом контекста и водителя» (CDA), сочетающую GMM, универсальную фоновую модель и максимизацию вероятности на основе слияния информации для определения статуса водителя и прогнозирования отвлеченного поведения водителя [13].Вышеупомянутые глубокие и поучительные работы были направлены на объяснение того, какую роль водитель играет в замкнутой системе «водитель-транспортное средство». В ходе дальнейших исследований были предприняты первые попытки разработать активную систему управления на основе характеристик водителя. Макадам подробно изучил физиологические пределы и физические характеристики водителей, а затем установил модель поперечного и продольного манипулирования водителями [14]. Холт и Коул построили нейромышечную линейную модель, которая рассматривает коактивацию нервно-мышечной системы, мышц, тела и носителя [15].Чай и др. описал метод регулировки параметров системы управления по проводам (SBW) в соответствии с характеристиками рулевого управления водителя, которые могут быть оценены по экспериментальным данным на основе общей модели водителя [16].
Sathyanarayana et al. предложил активную систему транспортного средства «с учетом контекста и водителя» (CDA), сочетающую GMM, универсальную фоновую модель и максимизацию вероятности на основе слияния информации для определения статуса водителя и прогнозирования отвлеченного поведения водителя [13].Вышеупомянутые глубокие и поучительные работы были направлены на объяснение того, какую роль водитель играет в замкнутой системе «водитель-транспортное средство». В ходе дальнейших исследований были предприняты первые попытки разработать активную систему управления на основе характеристик водителя. Макадам подробно изучил физиологические пределы и физические характеристики водителей, а затем установил модель поперечного и продольного манипулирования водителями [14]. Холт и Коул построили нейромышечную линейную модель, которая рассматривает коактивацию нервно-мышечной системы, мышц, тела и носителя [15].Чай и др. описал метод регулировки параметров системы управления по проводам (SBW) в соответствии с характеристиками рулевого управления водителя, которые могут быть оценены по экспериментальным данным на основе общей модели водителя [16]. Раксинчароенсак и др., Японские исследователи, разработали систему прямого управления моментом рыскания, основанную на идентификации намерения водителя, и производительность транспортного средства значительно улучшилась [17]. В литературе [18] была представлена система регистрации сигналов о поведении водителя, на основе которой повышается комфорт езды и безопасность транспортного средства.Fu et al. интегрировала модель водителя с контроллером восстановления на бездорожье с учетом целевого планирования водителя, поведения преследования, компенсирующего поведения и физических ограничений [19]. Кин и Коул предложили контроллер рулевого управления, основанный на прогнозирующем управлении линейной моделью. Формальная процедура идентификации системы применяется, чтобы избежать смещения из-за замкнутого цикла системы водитель-транспортное средство [20]. Хотя методы идентификации поведения водителя достигли значительного прогресса, в практических приложениях упомянутое выше оборудование для наблюдения за поведением водителя используется редко из-за его недостатков в цене и портативности.
Раксинчароенсак и др., Японские исследователи, разработали систему прямого управления моментом рыскания, основанную на идентификации намерения водителя, и производительность транспортного средства значительно улучшилась [17]. В литературе [18] была представлена система регистрации сигналов о поведении водителя, на основе которой повышается комфорт езды и безопасность транспортного средства.Fu et al. интегрировала модель водителя с контроллером восстановления на бездорожье с учетом целевого планирования водителя, поведения преследования, компенсирующего поведения и физических ограничений [19]. Кин и Коул предложили контроллер рулевого управления, основанный на прогнозирующем управлении линейной моделью. Формальная процедура идентификации системы применяется, чтобы избежать смещения из-за замкнутого цикла системы водитель-транспортное средство [20]. Хотя методы идентификации поведения водителя достигли значительного прогресса, в практических приложениях упомянутое выше оборудование для наблюдения за поведением водителя используется редко из-за его недостатков в цене и портативности.
Активные системы управления ходовой частью и водитель имеют взаимное влияние на управление транспортным средством с помощью прочных сцеплений. Из-за сложности, политропности и неопределенности поведения водителя чрезвычайно важно полностью понимать характеристики водителей и систем управления, создавать механизм совместной оптимизации и оптимизировать производительность системы «Водитель-Автомобиль-Окружающая среда».
При разработке персонализированной системы управления автомобилем одной из важнейших предпосылок является идентификация личности водителя.На основе литературы [14] профессор Го предложил системную теорию «предварительный просмотр-отслеживание», которая определяет процедуру принятия решения драйверами как предварительный просмотр и компенсацию. В соответствии с этой теорией создается предварительная модель оптимальной кривизны. Поскольку она ясно демонстрирует взаимосвязь между устойчивостью транспортного средства и характеристиками водителя, эта теория широко использовалась в исследованиях контроля устойчивости транспортного средства и адаптивного круиз-контроля из-за ее высокой точности и независимости от специального оборудования [21].Результаты моделирования и испытаний показывают, что эта теория точно описывает процедуру рулевого управления водителем. Ключом к применению этой теории является определение характеристик рулевого управления водителя.
В этой статье предлагается интегрированная стратегия управления шасси, основанная на идентификации характеристик драйвера. Во-первых, создается система сбора сигналов работы драйвера в реальном времени на основе dSPACE. С помощью этой системы собираются сигналы управления 10 опытными, 10 нормальными и 10 начинающими водителями на одном и том же пути.Затем генетический алгоритм применяется для анализа характеристик рулевого управления различными типами драйверов на основе модели оптимальной кривизны предварительного просмотра. Установлен онлайн-метод идентификации поведения водителя с помощью нейронной сети BP. Интегрированная система управления шасси (ICC) с активным передним рулевым управлением (AFS) и прямым контролем момента рыскания (DYC) разработана с использованием прогнозирующего управления модели (MPC) и с учетом характеристик поведения водителя. Наконец, выполняется моделирование для проверки предложенного метода посредством совместного моделирования MATLAB / Simulink и CarSim.Результаты испытаний показывают, что предложенный метод позволяет системе управления регулировать свои параметры в соответствии с результатами идентификации поведения водителя и эффективно повышать устойчивость автомобиля.
2. Сбор данных о поведении водителя
2.1. Система сбора данных о поведении водителя
Для точного анализа поведения водителя система сбора данных о поведении водителя разработана и создана на основе платформы моделирования в реальном времени dSPACE, как показано на Рисунке 1.Система моделирования в реальном времени dSPACE может реализовать бесшовное соединение с Matlab / Simulink посредством автоматической генерации кода и загрузки интерфейса реального времени (RTI). А с помощью тестового программного обеспечения ControlDesk dSPACE может выполнять визуальное управление и автоматический контроль тестов.
В этой системе dSPACE DS1006 используется в качестве процессора моделирования в реальном времени, который собирает информацию об открытии педали акселератора и педали тормоза вместе с углом поворота рулевого колеса в реальном времени и тем временем передает сигналы модели автомобиля CarSim который работает на промышленном персональном компьютере (IPC).CarSim генерирует виртуальную сцену, проецируемую на большой экран, в соответствии с которой водитель воспринимает среду вождения и управляет транспортным средством.
Для улучшения погружения в систему используется крутящий момент рулевого колеса производства SENSODRIVE. Рулевое колесо с регулируемыми параметрами влажности и трения может имитировать обратную связь по крутящему моменту на реальной дороге и значительно улучшает впечатления от вождения. Рулевое колесо подключено к dSPACE DS1006 через шину CAN.Датчики перемещения с линейным потенциометром используются для регистрации сигналов педали акселератора и педали тормоза через порты AD.
2.2. Сбор данных о поведении драйверов
Чтобы определить характеристики различных драйверов, анализируются режимы использования различных типов драйверов. В нормальных условиях работы режимы использования разных драйверов, как правило, схожи, и их трудно различить. Таким образом, эксперименты по сбору данных о вождении проводятся в рабочих условиях с двойной сменой полосы движения (DLC).Целевой путь показан на рисунке 2.
В экспериментах, чтобы гарантировать проверку данных испытаний, в качестве тестовых образцов выбраны 20 водителей-мужчин и 10 водителей-женщин. Среди водителей 10 — опытные водители, 10 — обычные, а последние 10 — начинающие водители. Перед началом эксперимента все водители обучаются знакомству с процессом эксперимента и системой сбора данных. Когда начинается сбор данных, водитель ускоряется от той же начальной точки до скорости 60 км / ч, 80 км / ч, 100 км / ч, 110 км / ч и 120 км / ч, соответственно, в конце полоса 1.Затем выполняется смена полосы движения в соответствии с целевой траекторией. Когда автомобиль проезжает полосу 3, водитель замедляет скорость до остановки.
Типичные сигналы сбора трех разных типов водителей показаны на рисунке 3. Видно, что, столкнувшись с панической сменой полосы движения, опытный водитель показывает более короткое время реакции и может плавно осуществить смену полосы движения. Напротив, начинающий водитель имеет тенденцию резко управлять транспортным средством, и оно может потерять устойчивость.
3. Анализ характеристик поведения водителей
3.1. Предварительный просмотр модели с оптимальной кривизной
Как показано на рисунке 3, среди рабочих сигналов водителей углы поворота рулевого колеса показывают наиболее значительную разницу между тремя типами водителей. Таким образом, в этом исследовании угол поворота рулевого колеса выбран для определения характеристик поведения водителей разных типов. Предварительный просмотр модели оптимальной кривизны, который широко используется в исследованиях замкнутых систем «водитель-транспортное средство», как упоминалось выше, представлен здесь для анализа поведения водителя при рулевом управлении [22].
Принято считать, что водитель планирует желаемый путь, управляя транспортным средством. Предположим, что желаемый путь и время предварительного просмотра водителя является постоянным, как показано на рисунке 4. В данный момент состояние транспортного средства равно
При условии, что расстояние предварительного просмотра равно, а именно, водитель всегда смотрит в точку предварительного просмотра, которая находится далеко впереди транспортного средства, время предварительного просмотра может быть определено как где — продольная скорость транспортного средства.
Боковая координата точки предварительного просмотра. Если водитель управляет углом поворота, в соответствии с которым определяется кривизна автомобиля и поперечное ускорение; во времени поперечное смещение автомобиля составляет
, учитывая, что является колесной базой и передаточным числом рулевого управления.
Мы получаем оптимальный угол поворота рулевого колеса:
Водители всегда стремятся использовать такой угол поворота рулевого колеса, при котором смещение транспортного средства могло соответствовать желаемому пути во времени.Учитывая запаздывание восприятия и действий водителя вместе с динамической реакцией транспортного средства при резком рулевом управлении, угол поворота рулевого колеса, которым должен управлять водитель, чтобы отслеживать целевой путь, находится где — время предварительного просмотра водителя, — это время задержки нейронного сигнала водителя. , — время задержки мышц водителя, — параметр коррекции рулевого управления и — параметр коррекции пропорционального усиления. Отношения между параметрами находятся в следующем порядке: где — параметр транспортного средства.- установившееся усиление бокового ускорения, динамическая реакция которого определяется как модель транспортного средства, которая будет описана в следующем разделе.
Таким образом, кадр модели оптимальной кривизны предварительного просмотра драйвера может быть продемонстрирован как на рисунке 5, из которого ясно видно, что параметры, и могут характеризовать различные типы поведения драйверов, а именно задачу идентификации различные виды поведения водителя на рулевом колесе подтверждают эти три параметра.
3.2. Определение параметров поведения водителя
3.2.1. Идентификация параметров модели автомобиля
Как показано на рисунке 5, перед определением параметров водителя необходимо указать характеристики автомобиля.
Согласно предварительной модели оптимальной кривизны, может быть описан как динамический отклик на:
В идеальной ситуации может быть прямо описан как. Учитывая, что динамическую реакцию транспортного средства нельзя игнорировать при резком повороте,,,, и являются константами, которые необходимо идентифицировать, и в (7) определяется как () .
Целью идентификации параметров является описание математической связи между входом и выходом системы. Поскольку механизм динамической реакции транспортного средства не обязательно требуется в этом исследовании, модель ARX, которая не требует явного физического отношения системы и хорошо работает при работе с системой более высокого порядка, принята здесь для определения параметров модель автомобиля. Выражение модели ARX показано ниже: где Здесь, — белый шум, есть и есть.
Используя набор инструментов MATLAB для вычисления, реальное поперечное ускорение и выходные данные идентификационной модели показаны на рисунке 6, который демонстрирует, что построенная здесь модель транспортного средства имеет высокую точность, а уровень идентификации составляет 97,2%.
3.2.2. Идентификация параметров модели автономного водителя для различных типов водителей
На основе идентификации модели транспортного средства должны быть идентифицированы параметры характеристик поведения водителя,,, и.Генетический алгоритм, имитирующий механизм естественного отбора и биологического эволюционизма, широко используется в распознавании образов, вычислительной технике, автоматическом управлении и т. Д. Здесь используется генетический алгоритм для определения параметров модели драйвера в автономном режиме.
Во-первых, три параметра модели драйверов должны быть ограничены соответствующим объемом, чтобы гарантировать точность результатов идентификации, а также ускорить процедуру идентификации. Как показано в литературе [22], параметры должны удовлетворять требованиям: где есть, и.и являются минимумом и максимумом, и, соответственно. .
Параметры ограничены определенным объемом, указанным в таблице 1.
Для обеспечения точности идентификации характеристики поведения водителя и того, чтобы динамические отклики модели драйвера хорошо соответствовали экспериментальным данным, целевая функция определяется как взвешенное значение суммы квадратов ошибок угла поворота рулевого колеса, поперечного ускорения и поперечного смещения: где, и — индексы отклонения угла поворота рулевого колеса, поперечного ускорения и поперечного смещения, соответственно.Их выражения показаны здесь, и являются теоретическими данными, основанными на модели водителя и модели транспортного средства. « — весовые коэффициенты, а — время выборки.
Поскольку существует три переменных, функция пригодности определяется в соответствии с методом простой адаптивной функции. Кроме того, приняты метод двоичного кодирования, стратегия пропорционального отбора, стратегия одноточечного переключения и стратегия простой мутации [23].
Как упоминалось в разделе 2, водителей можно разделить на три категории: опытных, обычных и начинающих.С помощью генетического алгоритма характеристики драйвера могут быть определены количественно, и результаты определения параметров приведены в таблице 2.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Когда автономная идентификация завершена, результаты принимаются в качестве выходных данных обучения онлайн-модели нейронной сети BP, используемой при онлайн-идентификации характеристик.
3.2.3. Идентификация параметров поведения водителя в режиме онлайн
Из-за относительной длительности генетического алгоритма, его низкой эффективности и отсутствия соответствия требованиям системы управления в реальном времени, в данном исследовании алгоритм нейронной сети BP разработан для онлайн-идентификации водителя. характерные параметры поведения. Нейронная сеть BP создана, как показано на рисунке 7.
Модель нейронной сети BP имеет 3 уровня; количество узлов входного слоя, скрытого слоя и выходного слоя, и равно 5, 8 и 3 соответственно.Пять узлов ~ во входном слое — это,,,, и, соответственно, — угол поворота рулевого колеса водителя, — это боковое смещение целевой траектории, — это реальное боковое смещение транспортного средства, — это поперечное ускорение транспортного средства, и продольная скорость транспортного средства. Три узла ~ в выходном слое — это,, и, которые являются характеристиками поведения диска, которые необходимо идентифицировать.
Выход скрытого слоя:
Выходные данные выходного слоя находятся где и являются весовыми коэффициентами входного слоя для скрытого слоя и скрытого слоя для выходного слоя, соответственно.Пороговые значения скрытого слоя и выходного слоя равны и соответственно. Это функция возбуждения:
Функция вычисления отклонения используется для вычисления отклонения желаемого выхода и рассчитанного выхода модели: где — желаемый выход.
Чтобы минимизировать дисперсию выходных данных, весовая матрица модификации обратного распространения используется в качестве правила обучения модели: где и — весовые коэффициенты после обновления, а и — пороговые значения после обновления.скорость обучения.
Результаты автономной идентификации, полученные с помощью генетического алгоритма, используются для обучения модели нейронной сети БП. И когда результат обучения будет таким, как показано на рисунке 8, обучение прекращается. Таблица данных, обученная на модели нейронной сети, может быть непосредственно использована в качестве модели идентификации характеристик характеристик поведения водителя. Таким образом достигается модель водителя, характеристики которой соответствуют поведению текущего водителя.
Таким образом, когда водитель управляет автомобилем, параметры его / ее поведения могут быть быстро определены, на основе чего система управления может быть спроектирована так, чтобы соответствовать характеристикам водителя.
4. Проектирование интегрированной системы управления шасси
Архитектура предлагаемой системы ICC для интеграции AFS и DYC с идентификацией поведения водителя показана на рисунке 9. Система управления в основном состоит из модуля идентификации водителя, предварительного просмотра модели драйвера оптимальной кривизны. , Эталонная модель транспортного средства с 2 степенями свободы (DOF) и модуль контроллера на основе управления прогнозированием модели (MPC). Различные типы характеристик драйверов помечаются тремя параметрами,, и, как показано в разделе 3; параметры, и определяются в режиме онлайн в соответствии с действиями водителя и состоянием автомобиля.Когда контроллер включен, три параметра используются для построения модели драйвера. определяется как прогнозируемый угол передних колес на основе модели водителя. конкретного водителя можно было бы предсказать в следующий раз в соответствии с результатом идентификации вместе с состоянием движения транспортного средства. Основываясь на прогнозе, эталонная модель с 2 степенями свободы может выводить желаемую скорость рыскания и угол бокового скольжения, которые являются целью контроллера MPC. Контроллер MPC оптимизирует в оперативном режиме угол поворота передних колес активного управления и момент рыскания.
4.1. Линейная эталонная модель с двумя степенями свободы
Эталонная модель транспортного средства с двумя степенями свободы, которая учитывает как точность, так и простоту, используется для расчета целевых выходных данных, как показано на рисунке 10. Угол бокового скольжения и скорость рыскания описаны в модели.
Уравнение в пространстве состояний транспортного средства: где где, — жесткость передней и задней оси на поворотах; масса; , опишите расстояния от ЦТ автомобиля до передней и задней оси соответственно; инерция автомобиля по рысканью; и — угол поворота передних колес и момент рыскания транспортного средства.
Чтобы гарантировать поперечную устойчивость автомобиля, скорость рыскания должна быть ограничена в пределах стабильного поля. Требуемая скорость рыскания может быть получена из установившегося прироста скорости рыскания эталонной модели: где
Кроме того, желаемая скорость рыскания должна быть ограничена в соответствии с коэффициентом трения дороги:
Для поддержания поперечной устойчивости необходимо важно для поддержания контроля над водителем, что может быть достигнуто при небольшом угле бокового скольжения транспортного средства.Согласно некоторым литературным данным [24] желаемый угол скольжения может быть выбран равным
4.2. Конструкция интегрированного контроллера шасси на основе MPC
В качестве новой методологии прогнозирования будущих состояний для минимизации отклонения между идеальным и фактическим выходом системы прогнозирующее управление модели (MPC) демонстрирует хорошую стабильность и надежность [20, 25 –27]. Он привлекает внимание дизайном интегрированной системы управления шасси с учетом поведения водителя.
В этом документе фактический и ожидаемый угол бокового скольжения и скорость рыскания выбираются в качестве входных данных контроллера MPC, а выходными данными являются ожидаемый активный момент рыскания и угол поворота переднего колеса. В контроллере прогнозирующая модель, основанная на эталонной модели с двумя степенями свободы, в первую очередь строится для прогнозирования управляемого выходного сигнала. Затем квадратичное программирование разрабатывается для оптимального решения.
Сначала функция пространства состояний (21) дискретизируется как И уравнение приращения может быть записано как где; ; где — дискретное время дискретизации.
Тогда прогнозируемый контролируемый результат находится где-то и являются прогнозным и контрольным горизонтами, соответственно, и.
Функцию стоимости можно описать следующим образом: где — весовой коэффициент отклонения выходных данных, — весовой коэффициент приращения управляющих входных данных и — желаемые выходные данные в горизонте прогнозирования; а именно,
На каждом временном шаге решается следующая задача оптимизации: с ограничениями входов, вариация входов и выходов, соответственно, находится в том месте, где неравенства (34) ограничивают управляющие входы, а (35) ограничивают изменения входных параметров. управляющий вход, а (36) — ограничения на выходные переменные системы.
Очевидно, это типичная задача оптимизации ограничений и может быть преобразована в задачу квадратичного программирования (QP): где где и — матрицы с ограничениями.
Затем первая выборка результатов используется для вычисления оптимального угла поворота и прямого момента рыскания по следующему закону управления с обратной связью:
5. Анализ и моделирование
Для проверки интегрированной стратегии управления шасси транспортного средства на основе Идентификация поведения водителя, совместное моделирование MATLAB / Simulink и CarSim принято, и основные параметры транспортного средства показаны в таблице 3.
| ||||||||||||||||||||||||||||||
Моделирование выполняется в типичных условиях работы с двойной сменой полосы движения. Модель драйвера в CarSim используется, и ее характеристика определяется алгоритмом онлайн.Чтобы проверить надежность работы стратегии управления при изменении скорости, моделирование запускается при продольной скорости 60 км / ч и 80 км / ч соответственно.
Согласно результатам онлайн-идентификации, три параметра рулевого управления модели драйвера в CarSim показаны в таблице 4.
Эти три параметра приняты в предварительной модели драйвера оптимальной кривизны, построенной в MATLAB / Simulink. Результаты тестирования стратегии управления показаны на рисунках 11-12, на которых (a) — траектории, (b) и (c) — скорость рыскания и поперечное ускорение соответственно, а (d) и (e) — контролируемые угол поворота руля и прямой момент рыскания соответственно.Видно, что оба автомобиля могут приемлемо отслеживать траекторию цели; кроме того, характеристики следования по пути транспортного средства явно улучшаются за счет использования идентификации поведения водителя (DBI) и MPC по сравнению с транспортным средством только с MPC. Между тем, как скорость рыскания, так и поперечное ускорение транспортного средства с DBI и MPC отслеживают желаемое значение более точно, чем транспортное средство только с MPC, что указывает на то, что управляемость и стабильность дополнительно улучшаются за счет введения DBI в MPC.Кроме того, оба привода имеют пониженную выходную величину. Подразумевается, что их энергопотребление оптимизировано по сравнению с автомобилем, оснащенным только контроллером MPC; кроме того, как обычно реализуется при активном управлении торможением, управление уменьшенным прямым моментом рыскания также снижает потери скорости транспортного средства и мощности двигателя.
Таким образом, при двойной смене полосы движения интегрированная система управления шасси, основанная на MPC, может эффективно обеспечивать устойчивость движения автомобиля. В сочетании с DBI интегрированный контроллер дополнительно регулирует поперечное смещение, скорость рыскания и поперечное ускорение до желаемой области с уменьшенной мощностью исполнительных механизмов.
6. Заключение
В этом документе представлена интегрированная стратегия управления с идентификацией поведения водителя.
Во-первых, система сбора данных о поведении водителя спроектирована и создана на основе платформы моделирования в реальном времени dSPACE, и данные, вводимые водителями различных типов, были собраны в условиях испытания с двойной сменой полосы движения. Как показывают собранные данные, среди рабочих сигналов водителей углы поворота рулевого колеса показывают наиболее значительную разницу между разными типами водителей.
На основе этого вводится предварительный просмотр модели оптимальной кривизны для анализа поведения водителя при рулевом управлении. Генетический алгоритм для автономного использования и алгоритм нейронной сети для онлайн-использования предназначены для распознавания различных паттернов драйверов, в частности, для определения трех параметров управления моделью драйвера.
Затем предлагается интегрированная стратегия управления активным углом поворота и прямым моментом рыскания. Идентифицированная модель водителя используется для прогнозирования угла поворота рулевого колеса в следующий раз в соответствии с заданным путем и состоянием транспортного средства.Линейная эталонная модель с двумя степенями свободы принята для расчета желаемого состояния транспортного средства, а прогнозируемое управление модели (MPC) используется для расчета активной контрольной величины, которая должна воздействовать на транспортное средство.
Наконец, моделирование выполняется с помощью совместного моделирования MATLAB / Simulink и CarSim. Результаты показывают, что предложенный метод может идентифицировать характерные параметры поведения водителя и дать возможность системе управления регулировать свои параметры в соответствии с результатами идентификации поведения водителя.Между тем, интегрированное управление с учетом характеристик водителя еще больше улучшило управляемость и устойчивость автомобиля по сравнению с индивидуальным контролем MPC.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарности
Эта работа частично поддержана Национальным фондом естественных наук Китая (51105169, 51205156 и 51475206) и проектами плана развития науки и технологий провинции Цзилинь (20140204010GX).
Как это работает: Контроль устойчивости
Дрифт на автомобиле боком — отличное развлечение для опытного гонщика на закрытой трассе, но это определенно не то, чем водители хотят заниматься в пробках в повседневных поездках. Чтобы помочь вам оставаться на верном пути, Transport Canada требует, чтобы каждое новое пассажирское транспортное средство, продаваемое в Канаде, начиная с 2012 модельного года, было оснащено электронной системой контроля устойчивости (ESC).
Система реагирует за миллисекунды, когда определяет, что автомобиль движется не в том же направлении, что и рулевое управление — другими словами, занос — и немедленно принимает меры, чтобы все выровнять.Считается достаточно важным то, что эта функция безопасности теперь также требуется на новых тракторных прицепах, продаваемых в Канаде, а в июне будущего года — также на междугородних и школьных автобусах.
Хотя все системы ESC в основном работают одинаково, между ними могут быть незначительные различия, поэтому автопроизводители часто присваивают им собственные имена. Вы можете увидеть, как это рекламируется под такими терминами, как система стабилизации транспортного средства (Acura), AdvanceTrac (Ford), StabiliTrak (General Motors) или Vehicle Dynamic Control (Nissan), среди многих других.
Контроль устойчивости очень помогает на наших зимних дорогах, но не на столько. Майкл Пик / Торонто СанСистема контроля устойчивости использует компоненты и датчики некоторых других функций безопасности автомобиля, включая антиблокировочную систему тормозов (ABS). Тормоза не позволяют колесам вращаться, но на самом деле именно шины, цепляющиеся за асфальт, останавливают автомобиль, и даже хорошие шины способны на многое. В транспортном средстве без АБС заклинивание тормозов приводит к блокировке колес, и шины могут скользить и превращать транспортное средство в гигантский тобогган.
До появления ABS водителей учили включать и выключать тормоза, давая шинам возможность цепляться за тротуар каждый раз, когда тормоза отпускаются. Антиблокировочная система тормозов делает то же самое, но с помощью электроники они нажимают и отпускают намного быстрее, чем это может сделать любой водитель, помогая сохранять устойчивость автомобиля при остановке. При панической остановке в автомобиле с АБС вы сильно нажимаете на тормоз и не отпускаете ногу, позволяя системе делать свое дело. Когда срабатывает АБС, вы почувствуете пульсацию педали тормоза, а также услышите скрежет или стон.Поскольку теперь шины имеют сцепление, а не скользят, вы также можете управлять автомобилем, если это помогает избежать столкновения, что невозможно, если колеса заблокированы и скользят.
Электронный контроль устойчивости также работает с антипробуксовочной системой автомобиля. Эта электронная система измеряет скорость вращения колес. Если кто-то вращается быстрее, что может указывать на то, что он на скользкой поверхности, система контроля тяги активирует тормоз на этом колесе, а также может на мгновение снизить мощность двигателя, помогая вращающейся шине восстановить сцепление с дорогой.(Иногда вам нужно немного покрутить колеса, например, когда вы пытаетесь выбраться из глубокого снега, поэтому рекомендуется выключить антипробуксовочную систему, если вы застряли.)
И ABS, и антипробуксовочная система. в первую очередь предназначены для продвижения вперед. Если что-то начинает уходить в сторону, тогда на помощь приходит ESC. Это зависит в первую очередь от трех датчиков, которые измеряют рыскание, скорость колес и угол поворота.
Датчик рыскания расположен в центре транспортного средства и, как следует из названия, измеряет рыскание — насколько транспортное средство перемещается влево или вправо от своей вертикальной оси.Затем система сравнивает это с углом поворота — направлением передних колес и тем, как далеко вы их повернули. Если вы повернули колеса влево, а машина послушно поворачивает в ту сторону, то все хорошо.
Но если датчики обнаруживают, что ваши колеса повернуты влево, а машина движется вправо, они понимают, что вы заносите боком. Чтобы помочь вам выбраться из этого, он использует некоторые или все компоненты из систем ABS и контроля тяги, включая торможение определенных колес и снижение мощности двигателя, чтобы вернуть все в соответствие с направлением колес и вернуть водителя. в управлении автомобилем.Он работает, когда передние или задние колеса теряют сцепление с дорогой и автомобиль начинает заносить. Он постоянно контролирует автомобиль в любых погодных условиях и автоматически включается при необходимости. Его можно временно отключить на некоторых моделях, но он вернется к значению по умолчанию при следующем запуске двигателя.
Система очень эффективна, и исследования Министерства транспорта Канады показывают, что количество ДТП, вызванных потерей управления водителями из-за этого, снизится на 29 процентов. Но он может сделать очень многое, и пока можно только спорить с законами физики.Чтобы обеспечить безопасное вождение, убедитесь, что ваши шины в хорошем состоянии, с достаточным протектором и должным образом накачаны. Меняйте полосу движения постепенно, вместо того, чтобы поворачивать колесо, чтобы переехать. Разгоняйте автомобиль медленно и равномерно, а не резко нажимайте на педаль газа, особенно на скользкой дороге. А если вы попадете на гравий или мягкую поверхность, например, на обочину, не нажимайте на тормоза. Вместо этого медленно отпустите дроссельную заслонку и постепенно возвращайтесь на тротуар.
Что такое адаптивный круиз-контроль?
Что такое адаптивный круиз-контроль?
Адаптивный круиз-контроль (ACC) — это система, предназначенная для помощи транспортным средствам в поддержании безопасной дистанции следования и в пределах установленной скорости.Эта система автоматически регулирует скорость автомобиля, поэтому водителям не нужно этого делать.
Адаптивный круиз-контроль — это один из 20 терминов, используемых для описания его функций, поэтому вы можете увидеть адаптивный круиз-контроль в рекламе и описаниях автомобилей следующим образом:
- Активный круиз-контроль
- Динамический круиз-контроль
- Радарный круиз-контроль
- Автоматический круиз-контроль
- Интеллектуальный круиз-контроль
ACC функционирует с помощью сенсорной технологии, установленной в транспортных средствах, таких как камеры, лазеры и радарное оборудование, которые создают представление о том, насколько близко один автомобиль находится к другому или другим объектам на проезжей части.По этой причине ACC является основой для будущей автомобильной разведки.
Эти сенсорные технологии позволяют автомобилю обнаруживать и предупреждать водителя о возможных лобовых столкновениях. Когда это происходит, начинают мигать красные лампочки и надпись «Тормозить сейчас!». появляется на приборной панели, чтобы помочь водителю замедлить скорость. Также может быть звуковое предупреждение.
Преимущества адаптивного круиз-контроля
Некоторые ключевые преимущества адаптивного круиз-контроля, упомянутые MyCarDoesWhat.org, включают повышение безопасности дорожного движения, поскольку автомобили с этой технологией сохранят достаточное расстояние между ними и другими транспортными средствами.Эти особенности пространства также помогут предотвратить несчастные случаи из-за ограниченного обзора или близкого расстояния. Точно так же ACC поможет максимизировать поток трафика благодаря своей пространственной осведомленности. Как водителю, вам не нужно беспокоиться о своей скорости, и вместо этого вы можете сосредоточиться на том, что происходит вокруг вас.
Ограничения адаптивного круиз-контроля
Несмотря на то, что адаптивный круиз-контроль имеет много преимуществ, все же есть ограничения, которые следует учитывать. Одним из основных недостатков этой системы является то, что она не полностью автономна.Водителю транспортного средства по-прежнему необходимо практиковать безопасные привычки вождения, которые будут работать в тандеме с этой технологией для достижения наилучших результатов. Точно так же неблагоприятные погодные условия, такие как снег, дождь или туман, могут сбить с толку датчики системы, а также факторы окружающей среды, такие как движение по туннелям.
В чем разница между автономным автомобилем уровня 1 и автономным автомобилем уровня 2?
Согласно SAE International, когда автомобиль имеет только автономный круиз-контроль, он считается автономным автомобилем уровня 1.Напротив, автомобиль с автономным круиз-контролем и дополнительной функцией, такой как контроль полосы движения, классифицируется как автономный автомобиль уровня 2.
Сколько стоит адаптивный круиз-контроль?
Согласно ExtremeTech, стоимость адаптивной системы круиз-контроля будет варьироваться в зависимости от того, сколько функций вы хотите. Если вы собираетесь иметь ACC со всеми доступными функциями, вы должны быть готовы заплатить от 2000 до 2500 долларов. Если вам нужен минимальный круиз-контроль, обеспечивающий скорость до 20-25 миль в час, эти более простые ACC могут стоить всего 500 долларов.Хорошая новость в том, что по мере того, как ACC становится все более распространенным, он, скорее всего, будет снижаться в цене.
История адаптивного круиз-контроля
U.S. News сообщает, что компания Mitsubishi впервые представила адаптивный круиз-контроль в Японии в 1992 году. Это была система определения расстояния на основе лидара, которая обнаруживала объекты, которые приближались слишком близко. Он был обозначен как «Debonair» и был запрограммирован так, чтобы предупреждать водителя о приближающихся объектах. Основное отличие заключалось в том, что водитель должен был задействовать тормоза и снизить скорость.
Однако два года спустя, в 1995 году, Mitsubishi Diamante продемонстрировал усовершенствованный подход к Debonair под названием «Preview Distance Control». В отличие от оригинальной технологии, эта система с лазерным питанием могла регулировать скорость водителя путем переключения на пониженную передачу или управления дроссельной заслонкой. Водитель по-прежнему отвечал за торможение.
С начала 2000-х годов известные автомобильные компании, такие как Ford, BMW, Mercedes, Cadillac, Volkswagen, Infinity, Hyundai, Toyota и Audi, создали свои версии адаптивного круиз-контроля для своих автомобилей.Эти индивидуальные особенности превратились в высокотехнологичную систему с автоматическим торможением и контролем скорости.
Типы адаптивного круиз-контроля
Радиолокационные системы
Согласно eInfoChips, радиолокационные системы работают, размещая радиолокационные датчики на пластиковых панелях или вокруг них для обнаружения окружающей среды вашего автомобиля. Каждый радарный датчик работает вместе, чтобы создать полную картину близости транспортного средства к другим автомобилям или потенциально опасным объектам. Этот тип датчика может выглядеть по-разному в зависимости от конструкции и модели автомобиля.
Лазерные системы
Как упоминалось в Electronic Design, этот тип системы ACC работает из большого черного ящика, который обычно помещается в решетку радиатора вашего автомобиля. Он использует лазерную технологию для определения близости объектов к вашему автомобилю. Он плохо работает во время дождя и других погодных условий.
Бинокулярные системы компьютерного зрения (оптические)
Согласно ExtremeTech, это относительно новая система ACC, введенная в эксплуатацию в 2013 году. В ней используются небольшие камеры, которые размещаются на задней части зеркала заднего вида автомобиля для обнаружения объектов, обращенных вперед.
Вспомогательные системы
Вспомогательные системы — это надстройки на основе радара, которые клиенты могут покупать вместе. Эти предаварийные системы могут предлагать управление полосой движения, помощь при торможении, круиз-контроль, оповещения о приближении к таким объектам, как углы, и усилитель рулевого управления.
Мультисенсорные системы
Согласно Fierce Electronics, адаптивные системы круиз-контроля иногда объединяют более одного типа датчиков, чтобы помочь в работе транспортного средства. Мультисенсорные системы включают в себя несколько различных типов датчиков, чтобы предоставить водителю расширенную информацию.Эти датчики могут включать оборудование для обработки данных GPS или камеры для сбора информации о географической среде транспортного средства и близости к другим автомобилям.
Predictive Systems
Как упоминалось Autoblog, системы прогнозирования — это тип ACC, который использует сенсорные данные для прогнозирования действий соседних транспортных средств. Это означает, что ваш автомобиль может замедлиться, чтобы подготовиться к другому транспортному средству, внезапно переключившему полосу движения, и тем самым повысит безопасность пассажиров.
Адаптивный круиз-контроль развивается с каждым годом.Автомобильные компании постоянно вносят изменения в эту технологию и при этом создают более распространенные и доступные варианты, которые можно приобрести с новым автомобилем или добавить к более старым моделям автомобилей, что делает вождение более безопасным для обычных людей.
Информация и исследования в этой статье проверены сертифицированным ASE техническим специалистом Кейт Канете из YourMechanic.com . Для любых отзывов или запросов на исправления, пожалуйста, свяжитесь с нами по адресу [email protected] .
Источники:
https://www.einfochips.com/blog/why-automotive-companies-should-adopt-radar-based-adas-systems/
https://www.electronicdesign.com/markets/ автомобильная / статья / 21797633 / лазерные диоды с адаптивным круиз-контролем как альтернатива радарам миллиметрового диапазона
https://www.autoblog.com/2015/01/14/new-honda-smart -cruise-control-predicts-other-motorists-future /
https://www.fierceelectronics.com/components/three-sensor-types-drive-autonomous-vehicles
https: // www.extremetech.com/extreme/157172-what-is-adaptive-cruise-control-and-how-does-it-work
Adaptive Cruise Control
https : //cars.usnews.com/cars-trucks/what-is-adaptive-cruise-control
https://www.caranddriver.com/features/columns/
https://www.sae.org/
Этот контент создается и поддерживается третьей стороной и импортируется на эту страницу, чтобы помочь пользователям указать свои адреса электронной почты.Вы можете найти больше информации об этом и подобном контенте на сайте piano.io.
Traction Control — функции активной безопасности
| Что такое трекшн-контроль? Как работает антипробуксовочная система | Загрузки |
Что такое трекшн-контроль?
В каких случаях может быть полезен контроль тяги?
Как работает трекшн-контроль?
Насколько эффективен контроль тяги?
Есть ли ограничения у трекшн-контроля?
Насколько распространена антипробуксовочная система на современных дорогах?
Что такое трекшн-контроль?
Traction Control — это активная функция безопасности транспортного средства, предназначенная для того, чтобы помочь транспортным средствам эффективно использовать все возможности сцепления , доступные на дороге, при ускорении на дорожных покрытиях с низким коэффициентом трения.Когда автомобиль без антипробуксовочной системы пытается разогнаться на скользкой поверхности, такой как лед, снег или рыхлый гравий, колеса могут проскальзывать. Результатом пробуксовки колес является то, что шины быстро вращаются на поверхности дороги без реального сцепления с дорогой, поэтому автомобиль не разгоняется. Противобуксовочная система активируется, когда она обнаруживает, что колеса могут пробуксовывать, помогая водителям максимально использовать сцепление с дорожным покрытием.
Важно помнить, что антипробуксовочная система не может создать тягу там, где ее нет.На поверхности, действительно не имеющей трения (например, на льду), автомобили с антипробуксовочной системой будут работать так же плохо, как и автомобили без нее.
Начало страницы
В каких случаях может быть полезен контроль тяги?
Противобуксовочная система помогает водителям ускоряться на скользкой дороге или в условиях низкого трения. К таким условиям относятся мокрые, обледенелые, неровные, рыхлые дороги или дороги в плохом состоянии. Примеры того, когда контроль тяги будет полезен, включают следующее:
- При ускорении в гору на рыхлом и гравийном покрытии.
- Наезд на участок слякотной дороги, из-за которого автомобиль замедляется из-за потери сцепления колес с дорогой.
- Разгон на зеленый свет на обледенелой дороге с приближающимся сзади автомобилем.
Начало страницы
Как работает трекшн-контроль?
работает аналогично антиблокировочной тормозной системе (ABS) (ABS) и часто рассматривается как дополнение к существующим установкам ABS. Фактически, антипробуксовочная система использует те же компоненты, что и ABS:
.- датчики скорости вращения колес , контролирующие скорость вращения передних или всех четырех колес;
- гидравлический модулятор , который качает тормоза, и;
- электронный блок управления (ЭБУ) , который получает информацию от датчиков скорости вращения колес и, при необходимости, направляет гидравлический модулятор для накачки тормозов.
Современные системы АБС и противобуксовочная система состоят из блока управления двигателем и гидравлического модулятора, соединенного вместе, так что, хотя они выполняют разные функции, они физически представляют собой единое целое. ЭБУ постоянно проверяет, вращаются ли одни колеса быстрее других — это показатель того, что колесо теряет сцепление с дорогой. Когда обнаруживается возможное проскальзывание колеса, ЭБУ дает команду гидравлическому модулятору быстро задействовать и отпустить тормоз ( «накачать тормоз» ) на проблемное колесо, чтобы снизить скорость его вращения.Некоторые системы контроля тяги также снижают мощность двигателя на колесах, которые вот-вот пробуксовывают. Как только колесо восстанавливает сцепление с дорогой, система возвращается к отслеживанию скорости вращения колес и сравнению скорости вращения колес транспортного средства.
Изображение любезно предоставлено Toyota Canada
В транспортном средстве, которое использует пониженную мощность двигателя для управления вращением проскальзывающих колес, водители могут испытывать пульсацию педали газа, когда управление тяговым усилием активно. Эта пульсация нормальная и не означает, что с системой контроля тяги что-то не так.
Начало страницы
Насколько эффективен контроль тяги?
Испытания показали, что контроль тяги эффективен для уменьшения пробуксовки колес при ускорении в условиях низкого трения (Song and Boo 2000), хотя этот эффект более заметен в автомобилях с полным приводом, чем в автомобилях с передним приводом. В том же исследовании было обнаружено, что системы контроля тяги, которые включают уменьшение мощности двигателя для проскальзывания колес, связаны с лучшей стабильностью, но системы только с тормозами подходят для улучшения характеристик ускорения транспортного средства (Song and Boo 2000).
В целом, эффективность антипробуксовочной системы для уменьшения или предотвращения аварий и травм не подтверждена документально. Тем не менее, из-за того, что он часто комплектуется вместе с ABS и электронным контролем устойчивости (ESC), разумно предположить, что вождение автомобиля, оснащенного этой тройкой, значительно снижает риск аварии со смертельным исходом до 50%.
Начало страницы
Есть ли ограничения у трекшн-контроля?
Да. Как и многие другие функции безопасности, реализация всех преимуществ антипробуксовочной системы зависит от того, правильно ли с ней взаимодействуют водители. Это означает, что продолжать движение безопасно и только в условиях, когда вы чувствуете себя в безопасности за рулем. Поведение, такое как превышение скорости , движение задним ходом и агрессивное вождение — все это работает против преимуществ контроля тяги. Например, слишком быстрое вождение для дорожных условий увеличивает риск столкновения, даже если у вашего автомобиля есть антипробуксовочная система, поскольку антипробуксовочная система не предназначена для уменьшения тормозного пути.Кроме того, в то время как автомобили без противобуксовочной системы могут испытывать снижение скорости на скользкой дороге, такое же снижение скорости может не наблюдаться в транспортных средствах с противобуксовочной системой. Таким образом, контроль тяги может позволить транспортным средствам развивать более высокую скорость, чем это безопасно для дорожных условий. Из-за этого водители должны особенно внимательно следить за своей скоростью.
Всегда важно сохранять бдительность и сосредоточиться на задаче вождения, независимо от того, сколько средств безопасности установлено на транспортном средстве.Противобуксовочная система не помогает водителям быстрее останавливаться на скользкой дороге, поэтому любое поведение, увеличивающее время реакции, отрицательно скажется на общей безопасности. Для иллюстрации, время реакции увеличивается на отвлечение водителя , усталость и нарушение алкоголя .
Хорошая новость заключается в том, что преимущества противобуксовочной системы могут быть получены до тех пор, пока водители продолжают использовать безопасные методы вождения, осторожность и здравый смысл.
Начало страницы
Насколько распространена антипробуксовочная система на современных дорогах?
были впервые представлены на автомобилях высшего класса в 1987 году, хотя некоторые мощные заднеприводные автомобили в начале 70-х были оснащены ранней версией контроля тяги.Что касается текущей доступности, антипробуксовочная система обычно доступна на любом автомобиле с ABS, поскольку антипробуксовочная система была разработана и построена на основе существующей технологии ABS.
Начало страницы
EV design — управление режимами (система управления транспортным средством) — x-engineer.org
В этой статье мы собираемся обсудить высокоуровневый контроллер электромобиля под названием Vehicle Control System (VCS) . В серийном автомобиле система управления транспортным средством очень сложна, распределена по нескольким электронным модулям управления и имеет множество взаимодействий с другими системами транспортного средства (торможение, отопление и вентиляция, управление аккумулятором и т. Д.). Цель этой статьи — понять, как работает упрощенный контроллер высокого уровня и какова основная информация, которой обмениваются модули.
С аппаратной точки зрения мы рассмотрим четыре системы электромобиля:
- силовой агрегат
- высоковольтный аккумулятор
- автомобиль (кузов)
- тормоза
С программной (контроллерной) точки Рассмотрим несколько систем управления:
- система управления электромашиной (EMCS)
- система контроля устойчивости (SCS)
- система управления аккумулятором (BMS)
- система режима водителя (DMS)
- система управления автомобилем (VCS)
Система управления электрическими машинами (EMCS) в основном представляет собой инвертор.Это называется электрической машиной, потому что это может быть двигатель (положительный крутящий момент) или генератор (отрицательный крутящий момент), в зависимости от действий водителя (положение педали акселератора и тормоза). EMCS получает запрос крутящего момента от системы управления транспортным средством (VCS) и модулирует фазы статора (для электрических машин с постоянными магнитами), чтобы получить требуемый крутящий момент.
EMCS также выполняет диагностику электрических машин и отправляет статус. Например, в случае тепловой защиты система управления электрической машиной (EMCS) сообщает системе управления транспортным средством (VCS), что она не может применить запрошенный крутящий момент, и отправляет предел крутящего момента (пониженный крутящий момент).
Изображение: Сигнальный интерфейс между основными электронными модулями управления
Примером EMCS являются силовые инверторы семейства PM100 и PM150 от Rinehart Motion Systems. Они подходят для ряда приложений, таких как высокопроизводительные автомобили, профессиональный автоспорт, гибридная силовая установка для тяжелых транспортных средств, преобразование статической энергии, гибридный расширитель диапазона или контроллер встроенного стартер-генератора (ISG).
Семейство пропульсивных инверторов PM предназначено для использования на дорогах и внедорожниках с электрическими (EV) или гибридными автомобилями (HEV).Их основная цель — преобразовать мощность постоянного тока от высоковольтной батареи в 3-фазный переменный ток, необходимый для электрической машины.
Изображение: Модуль управления инвертором (RmS)
Кредит: Reinhart Motion Systems
- Соединения контура охлаждения (вход / выход)
- Порты связи и ввода-вывода
- Соединения высоковольтной батареи (DC)
- Трехфазный выход соединения (переменный ток)
Технические характеристики:
| Модель контроллера | PM100DX | PM100DZ | PM150DX | PM150DZ 900 — рабочее напряжение постоянного тока| ] — рабочее напряжение постоянного тока | ] | 50–400 | 100–800 | 50–400 | 50–800 | |
| Отключение по перенапряжению постоянного тока [В] | 420 | 840 | 420 | 840 | ||||||
| Макс.Напряжение постоянного тока — при хранении [В] | 500 | 900 | 500 | 900 | ||||||
| Ток двигателя (постоянный) [A] | 300 | 150 | 450 | 225 | ||||||
| Двигатель ток (пиковый) [A] | 350 | 200 | 450 | 300 | ||||||
| Выходная электрическая мощность (пиковая) [кВА] | 100 | 100 | 150 | 150 | ||||||
| Шина постоянного тока емкость [мкФ] | 440 | 280 | 880 | 560 | ||||||
| Размер, длина x высота x ширина [мм] | 200 x 87 x 314 | 200 x 87 x 436 | ||||||||
| Объем [ l] | 5.5 | 7,6 | ||||||||
| Вес [кг] | 7,5 | 7,5 | 10,7 | 10,7 | ||||||
Источник: Reinhart Motion Systems
Сводка по портам связи и ввода-вывода:
- 6 (0 -5V) аналоговые входы
- 2 выбираемых входа RTD 100 / PT1000
- 8 цифровых входов STB / STG
- 4 выхода драйвера высокого уровня
- 2 выхода драйвера низкого уровня
- 1 интерфейс резольвера
- 1 квадратурный энкодер
- 1 sin -cos кодировщик
- 2 CAN 2.0 Порты A / B
- 1 Порт программирования RS232 1 МБ
Аналоговые входы могут использоваться для различных датчиков (положения, давления и т. Д.). Входы RTD (резистивный датчик температуры) используются для подключения датчиков температуры. Резольвер, квадратурный энкодер и sin-cos энкодер являются входами от датчиков положения / скорости (вращения). CAN (сеть контроллеров) используется в качестве протокола связи с другими модулями (например, VCS). Порт программирования используется для прошивки модуля с другим программным алгоритмом или программной калибровкой.
Система контроля устойчивости (SCS) имеет несколько функций, для которых она обменивается информацией с системой управления транспортным средством (VCS). Основная функция — управление тормозной системой и предоставление точной информации о скорости автомобиля другим системам. Он также отправляет запрос тормозного момента в VCS, который применяет его к электрическим машинам через EMCS. Идея состоит в том, что запрос на торможение от водителя, считываемый через положение педали тормоза, не переводится автоматически в активацию основного тормоза (гидравлического).Вместо этого электрические машины переходят в режим генератора, обеспечивая отрицательный крутящий момент, и транспортное средство замедляется, одновременно восстанавливая электрическую энергию.
Изображение: Модуль управления тормозами
Кредит: Bosch
Для обеспечения устойчивости автомобиля SCS вычисляет максимальные пределы крутящего момента для обеих электрических машин. Например, если транспортное средство катится по поверхности с низким коэффициентом трения (например, снегу или льду), крутящий момент электрической машины ограничивается, чтобы избежать пробуксовки колес и возможной нестабильности транспортного средства.В целях рекуперации энергии VCS сообщает SCS, какой максимальный тормозной момент может быть применен. Этот предел крутящего момента рассчитывается на основе номинального крутящего момента электрической машины или пониженного значения (отправляемого EMCS).
Основное назначение системы управления батареями (BMS) — контролировать высоковольтную батарею с точки зрения балансировки напряжения ячеек, состояния заряда (SOC) и состояния здоровья (SOH). В целях тепловой защиты он также ограничивает максимальный ток (положительный или отрицательный) батареи.
Изображение: Модуль управления аккумулятором (Orion BMS)
Кредит: Ewert Energy Systems
В качестве примера мы можем взглянуть на Orion BMS, разработанную и изготовленную Ewert Energy Systems. Основные характеристики:
- Контролирует напряжение каждой ячейки
- Программируется и обновляется на месте
- Интеллектуальная балансировка ячеек (эффективная пассивная балансировка)
- Обеспечивает минимальное и максимальное напряжения элементов
- Обеспечивает максимальные ограничения тока
- Обеспечивает температурные ограничения
- Professional и design
- Отслеживает состояние заряда (SOC)
- Сохраняет данные об истории батареи
- Интеграция с 3 приложениями для смартфонов rd (Torque, EngineLink)
Совместимость с батареями:
- Совместимость практически со всеми литий-ионными элементами
- Настройка в один клик для многих распространенных типов батарей
- Поддерживает 4-180 ячеек последовательно на каждый модуль BMS
Расчеты:
- Состояние здоровья (SOH)
- Напряжение разомкнутой цепи
- Предел зарядного тока
- Ограничение тока разряда
- Внутреннее сопротивление (для e каждая отдельная ячейка, а также весь пакет)
Централизованная конструкция:
- Отсутствие плат отводов ячеек или внешних схем
- Быстрый опрос напряжения элементов (типично каждые 30 мс)
- Высокая устойчивость к электромагнитным помехам (EMI) и прочим шум
- Высокоточное измерение напряжения ячейки
Два программируемых интерфейса шины CAN:
- CAN2.0B (поддерживаются 11-битные и 29-битные идентификаторы)
- Независимая работа с разными скоростями передачи
- Полностью настраиваемое форматирование сообщений
- Обновляемая прошивка и настройки на месте с использованием интерфейса CAN
- Настройка в один клик для многих распространенных зарядных устройств и инверторов
- Совместимость с протоколом OBD2 (поддерживает множество инструментов сканирования)
- Может использоваться с приложениями CANOpen и J1939
Вход / выход
- Простое взаимодействие с зарядными устройствами и нагрузками
- Включение / выключение выходов для управления зарядкой и разрядкой
- 0 — 5В аналоговые выходы для постепенного снижения тока (увеличивает полезный диапазон батареи)
- Контроль температуры для охлаждения / нагрева батареи
Диагностические функции
- Диагностические коды неисправностей быстро идентифицируют и диагностируют проблемы батареи
- Данные фиксированной рамки записывают точные условия, когда произошла ошибка.
- Поддерживает автомобильный протокол OBD2 для хранения диагностических кодов неисправностей и опроса данных в реальном времени
Регистрация данных
- Устройство отслеживает общее количество циклов батареи
- Записывает количество и продолжительность событий перегрева и перегрузки по току
- Все Параметры BMS могут быть зарегистрированы с помощью служебного программного обеспечения для ПК.
- Дополнительный дисплей для регистрации данных может записывать любые параметры на карту памяти
Другие функции
- Обнаружение неисправности изоляции
- Несколько блоков BMS могут использоваться последовательно
- Разъемы блокировки автомобильного класса
- Температурная компенсация для улучшенного мониторинга при различных температурах
Система Driver Mode System (DMS) обеспечивает интерфейс между водителем и автомобилем.Водитель может выбрать (ввод):
- положение рычага переключения передач (парк, задний ход, нейтраль, движение)
- требование крутящего момента (по положению педали акселератора)
- требование торможения (по положению педали тормоза)
- Уставка скорости автомобиля (для круиз-контроля)
Вся эта информация передается в VCS, который принимает решения относительно значения крутящего момента электрической машины и направления вращения. Крутящий момент электрической машины передается обратно в DMS и может использоваться для отображения режима трансмиссии (ускорение или торможение) и уровня рекуперации энергии.
Система управления автомобилем (VCS) является главным контроллером транспортного средства. Его основная функция — определять режим работы электрической машины (двигатель / генератор) и значение крутящего момента. Логика управления учитывает состояние электрической машины (машин), состояние высоковольтной аккумуляторной батареи, состояние транспортного средства и данные, поступающие от водителя. На изображении ниже показан упрощенный конечный автомат высокого уровня, который можно использовать в качестве главного контроллера электромобиля (EV).
Изображение: конечный автомат для управления энергией и крутящим моментом
Когда на автомобиль подается питание (ключ зажигания включен), VCS переходит в состояние Initialisation . Функция зависит от скорости автомобиля и действий водителя (положение рычага переключения передач, положение педали акселератора, положение педали тормоза), он может перейти в состояние ускорение, , выбег, или , рекуперация энергии, . В таблице ниже приведено описание условий входа в государства.
| Состояние | Инициализация | Ускорение | Выбег | Рекуперация энергии |
| Зажигание ) Положение AP> 0% Положение BP = 0% | Рычаг переключения передач в Drive (D) Скорость автомобиля> 0 км / ч Положение AP = 0% Положение BP = 0% | Рычаг переключения передач в Drive (D) Положение AP = 0% Положение BP> = 0% | ||
| Выход | Нет | EM крутящий момент> 0 Нм EM состояние = ДВИГАТЕЛЬ | EM крутящий момент = 0 Нм EM состояние = MOTOR | EM крутящий момент <0 Нм Состояние EM = ГЕНЕРАТОР |
AP — педаль акселератора
BP — педаль тормоза
EM — электрическая машина
В состоянии Acceleration суб- состояние Номинальное значение , что означает отсутствие ограничения крутящего момента на электрической машине (-ах) или ограничения мощности на высоковольтной батарее.В зависимости от уровня крутящего момента, запрашиваемого водителем (положением педали ускорения), крутящий момент может применяться только на передней оси (передний привод, FWD ) или на обеих осях (полный привод, AWD ). . В случае тепловой защиты (электрической машины или аккумулятора) транспортное средство может перейти в состояние Ограничение крутящего момента , которое ограничивает максимальный крутящий момент, который может быть приложен к электрической машине, и максимальный электрический ток, идущий в батарею или выходящий из нее.
В состоянии выбегом VCS не прикладывает никакого тягового или тормозного момента к электрической машине (ам), чтобы полностью использовать кинетическую энергию транспортного средства для движения. Уставка крутящего момента для электрических машин составляет 0 Нм.
В состоянии Рекуперация энергии электрические машины становятся генераторами и производят электрическую энергию. В зависимости от значения положения педали тормоза крутящий момент (отрицательный), прикладываемый к электрической машине, является переменным.Кроме того, общий отрицательный крутящий момент может быть разделен между осями Front и Rear в зависимости от состояния автомобиля и условий движения.
Это упрощенный пример контроллера электромобиля (EV), но он дает очень хорошее представление о том, какая информация обменивается между различными модулями управления и каким может быть режим работы в зависимости от входных сигналов.
Что нужно знать о разработке систем управления скоростью движения транспортных средств | Подключенные автомобили, Тенденции в автомобильной промышленности, Отслеживание транспортных средств | Cprime
Быстрая навигация
Водителям необходимо постоянно оценивать свою скорость и вождение, чтобы определять безопасную скорость для текущих дорожных условий, других транспортных средств, пешеходов и любой из тысячи других вещей, которые могут произойти в любой момент.Выбрать оптимальную скорость стало труднее, поскольку автомобили стали тише и плавнее, а крейсерские скорости увеличились. Это привлекло внимание к вопросам безопасности вождения.
Большинство новых функций безопасности устанавливается на заводе, но старые автомобили требуют дополнительных решений и устройств. Существует широкий спектр устройств контроля скорости, таких как ограничители максимальной скорости, автоматические ограничители скорости, бортовые устройства мониторинга и регистраторы аварий. Ограничение максимальной скорости вашего автомобиля обычно осуществляется либо с помощью систем управления двигателем, либо с помощью устройства, которое напрямую управляет дроссельной заслонкой или топливными форсунками.Системы круиз-контроля также можно отнести к разряду систем ограничения скорости для автомобилей. Они удобны для поддержания минимальной скорости, но не контролируют поведение водителя, поскольку просто поддерживают скорость, установленную для них водителем.
Итак, что необходимо в современной транспортной среде, так это автоматическая система контроля скорости транспортного средства, которая будет эффективно влиять на скорость движения и побуждать водителей соблюдать ограничения скорости, значительно повышая безопасность. Функциональность такой системы будет варьироваться в зависимости от размера транспортного средства (легковой или грузовой) и основана на управлении скоростью транспортного средства с помощью микроконтроллера.Возможности системы могут включать:
- Информация в реальном времени о местоположении и скорости транспортного средства (обычно на основе GPS)
- Информация в реальном времени о существующих ограничениях скорости и возможных опасных зонах
- Обратная связь в режиме реального времени с автомобилем. превышение скорости
- Функции дистанционного управления
- Доступ в любое время и в любом месте через смартфон или планшет
Какие компании могут потребоваться для разработки системы управления скоростью автомобиля?
Есть множество компаний, которые вводят ограничения скорости с помощью интеллектуальных транспортных систем.Они используют их для обеспечения безопасности своего автопарка, отслеживания активов, поддержания наблюдения и т. Д.
Компании по аренде автомобилей используют системы управления скоростью как часть своего программного обеспечения по аренде автомобилей, чтобы отслеживать свой парк арендованных автомобилей и выставлять счета за опасное вождение. Водителям арендованных транспортных средств могут быть предоставлены возмещаемые кредиты за расстояние, которое они проехали в пределах установленного ограничения скорости, или им могут быть выписаны надбавки за расстояния, пройденные с превышением скорости. Более того, получая в режиме реального времени информацию о состоянии автомобиля, компания по аренде может быстро реагировать на поломки и аварии.
Страховые компании все чаще используют системы контроля скорости для автомобилей, чтобы контролировать вождение своих клиентов, что позволяет им снизить страховые взносы и затраты на урегулирование.
Устройства контроля скорости обычно устанавливаются на автомобили, которые страхует компания, и обеспечивают удаленный доступ к телеметрии транспортного средства. Получая в режиме реального времени данные о вождении транспортных средств и водителей (расстояние поездки, время вождения и опасное поведение при вождении), страховая компания может анализировать и выяснять фактический уровень риска своих клиентов.Затем компания может разработать политику со скидками для ответственных клиентов с низким уровнем риска.
Автосалоны устанавливают устройства ограничения скорости на продаваемые ими новые автомобили с рассрочкой платежа, чтобы отслеживать, насколько безопасно вождение автомобиля и его местонахождение.
Читайте также: Как создать лучшее программное обеспечение для автомобильных дилеров
Даже государственные органы, занимающиеся контролем движения транспортных средств, используют технологию управления скоростью автомобилей в программах контроля скорости для снижения скорости и предотвращения аварий.
Хотя существуют правительственные постановления, требующие установки регуляторов скорости на транспортных средствах, данные опроса показывают, что в большинстве европейских стран большой процент водителей по-прежнему ездит со скоростью, превышающей установленную. Обычно от 40% до 60% водителей превышают ограничение, а примерно от 10 до 20% превышают ограничение скорости более чем на 10 км / ч. Таким образом, система контроля скорости автомобиля, которая предупреждает водителя о текущих ограничениях скорости на дороге, была бы очень полезной.
Европейский Союз активно продвигает систему интеллектуальной адаптации скорости (ISA), которая сравнивает фактическую скорость транспортных средств с ограничениями скорости в определенных местах.На веб-сайте Европейской комиссии говорится, что ISA помогает водителям соблюдать ограничения скорости в любом месте сети.
Объединенные Арабские Эмираты активно используют системы мониторинга дорожного движения, наблюдения и правоохранительные органы в повседневной жизни страны и внедрили системы управления дорожным движением для отслеживания опасного вождения и реагирования на чрезвычайные ситуации.
Законодатели Австралии рекомендовали требовать от хронических спидеров оснастить свои автомобили контрольными устройствами, чтобы полиция могла отслеживать их вождение.
Что необходимо для разработки системы управления скоростью автомобиля?
Прежде всего, вам необходимо устройство, которое может считывать текущие доступные данные об автомобиле. Автомобили, выпущенные с середины 1990-х годов, обычно имеют порт для считывания данных об автомобиле и могут быть оснащены устройством для подключения к автомобилю.
Устройства контроля скорости автомобиля, которые могут считывать данные с автомобиля, обычно подключаются к бортовому диагностическому порту автомобиля (порт OBD-II), расположенному рядом с рулевой колонкой.
Наконец, вам понадобится специальное программное обеспечение для обработки данных автомобиля и предупреждения водителя о потенциально опасных ситуациях и нарушениях скорости.
Например, портфолио Archer-soft включает решение для мониторинга поведения при вождении и управления безопасностью для отслеживания транспортных средств, а также для анализа и улучшения характеристик водителя. Ключевые особенности этого решения:
- Обратная связь в режиме реального времени в автомобиле об агрессивном вождении и превышении скорости
- Отслеживание транспортного средства в режиме реального времени Управление холостым ходом и скоростью
- Настраиваемые информационные панели и отчеты
- Предупреждения в реальном времени
- В любое время доступ в любом месте через смартфон или планшет
Полезна ли система ограничения скорости автомобиля для обычных водителей?
Любой, кто выбирает систему контроля скорости автомобиля, естественным образом адаптирует свое поведение при вождении по мере получения отзывов о своем вождении.Многие ответственные водители и те, кто хочет улучшить свое вождение, выбирают именно такую систему. Это также помогает уменьшить распространенные ошибки, допускаемые неопытными водителями, которые даже не подозревают, что водят их опасно.
Одной из возможных функций программного обеспечения для управления скоростью может быть подключение к социальным сетям. Водители могли делиться своими достижениями в области безопасного вождения с друзьями через подключенный смартфон или планшет. Они даже могут начать испытание безопасного вождения, чтобы стать самым безопасным водителем среди своих друзей.
Системы ограничения скорости могут быть чрезвычайно полезны для водителей электромобилей, которые слишком тихие и плавные, чтобы чувствовать скорость транспортного средства. Звуковые сигналы и виртуальные звуки двигателя, производимые системой, сообщают водителю о превышении скорости, повышая безопасность этих транспортных средств. Попробуйте наше приложение Car Sound Sim, которое сделает вождение электромобиля более безопасным и приятным.