


что это, где находится и как подключиться для диагностики автомобиля
Автомобили давно уже стали не просто компьютерами на колёсах, а скорее компьютерными сетями. Передача механических, гидравлических или пневматических усилий между узлами и механизмами со временем превратилась в обмен электрическими сигналами, а сейчас и в информационное взаимодействие.
Содержание статьи:
- 1 Зачем нужна в машине CAN-шина
- 2 Схема и место расположения КАН-интерфейса
- 3 Принцип работы
- 4 Виды CAN-шин
- 5 Как подключиться и сделать диагностику автомобиля
- 6 Неисправности
- 7 Плюсы и минусы встроенных шин
Наряду с массовым внедрением дешёвых электронных комплектующих, потребовалось разработать достаточно сложное и надёжное сетевое физическое и программное обеспечение.
Зачем нужна в машине CAN-шина
По мере усложнения автомобильной электроники, производители столкнулись с некоторыми проблемами, которые всё больше проявлялись с ростом рыночной конкурентоспособности новых моделей.
Далее наращивать объём оборудования простым добавлением управляющих и исполнительных устройств стало невозможно:
- количество проводов в жгутах, их масса, объёмы и расход дорогостоящей меди стали превышать разумные пределы;
- многие узлы, особенно датчики и первичные преобразователи, многократно дублировались, что необоснованно увеличивало затраты;
- сложнейшие автомобили, особенно премиального класса, стали совершенно неподъёмными в обслуживании и диагностике даже для профильных сервисов из-за отсутствия стандартизации технических решений;
- надёжность машин падала по мере роста количества заключённого в них оборудования, как по чисто объективным законам связи сложности и безотказности, так и из-за отсутствия времени на отработку многочисленных уникальных систем.
Решение должно было быть радикальным, и этот качественный скачок в развитии автомобильной электроники произошёл.
Электросхемы машин стали делать по принципам, заложенным в основах вычислительной техники и к тому времени уже достаточно устоявшимся и понятным.
Автомобиль стал представлять собой сеть из микрокомпьютеров, каждый из которых обслуживал свою систему или отдельный узел.
Например, двигатель, коробку передач, узлы трансмиссии, блок климата и даже отдельные фонари наружного освещения или стеклоподъёмники. Уже не надо было тянуть к каждому устройству медные провода в огромном количестве через весь автомобиль.
Причём до появления единой информационной шины некоторые узлы были обвешаны сразу несколькими однотипными датчиками, электронными блоками и жгутами проводки.
По теме: Как работает автопилот в современных автомобилях
CAN-шина обходится единственной витой парой, то есть скрученными между собой двумя тонкими проводками, которые обходят все устройства, имея ответвления на каждое из них.
По схеме получается, что все блоки соединены параллельно через данную шину. Последовательный способ передачи информации делает это возможным, отдельных проводов данных, адресов, синхронизации и назначения приоритета не требуется.
Более того, системе не нужен единый обрабатывающий и управляющий сервер, все ресурсы распределены по микроконтроллерам.
Схема и место расположения КАН-интерфейса
Сеть имеет выход наружу через диагностический OBD разъём, где на этот счёт стандартом чётко определена пара контактов.
Точнее, две пары, из дальнейшего рассмотрения станет понятно, что через диагностику можно подключаться к двум CAN-шинам различного вида и назначения.
Обеспечивающий совместную работу шлюз в разных автомобилях может быть выполнен в виде отдельного блока, входить в состав контроллера управления двигателем, но чаще – приборной панели.
Принцип работы
Работа CAN-шины определяется физическим и логическим протоколами, которые достаточно чётко стандартизованы, хотя и имеют целый ряд исполнений.
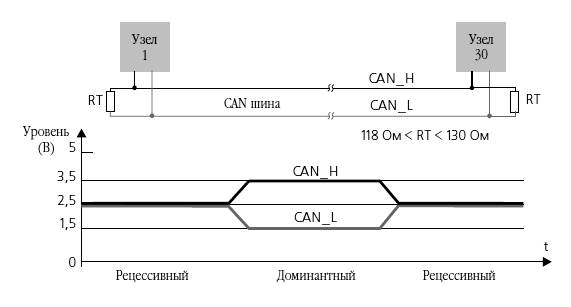
Физически это витая пара, каждый из проводов которой является сигнальным. Работают они в противофазе, один поэтому называется CAN-High, второй – CAN-Low.
Сделано так с целью обеспечить максимальную помехоустойчивость при большой скорости передачи данных. Сигнал с пары снимается по дифференциальному принципу, то есть парой встречно включённых компараторов.
На концах витой пары имеется волновое согласование двумя терминальными резисторами по 120 Ом. Хотя встречаются и другие номиналы, но редко.
Активным уровнем считается низкий, он же логический ноль. Это общий принцип в работе устройств с открытым коллектором, разве что тут не применяется инвертирование уровней. Отсюда и логический принцип работы – инициируется линия любым устройством, открывшим свой выходной транзистор и сформировавшим первый нулевой бит.
Далее идёт идентификация приоритетного устройства, которое должно передать свою информацию первым в случае конфликта во времени. Протокол стандартный, каждый бит посылки расписан в даташитах ISO.
Это интересно: Почему появляется вибрация в салоне автомобиля
Все устройства одновременно передают и считывают информацию чётко соблюдая протокол, зашитый в памяти их контроллеров. Ненужные или ошибочные данные определяются и игнорируются.
Ненужные или ошибочные данные определяются и игнорируются.
Виды CAN-шин
Обычно используют две шины – высокоскоростную и низкоскоростную (не желая использовать этот компрометирующий термин, некоторые производители говорят о среднескоростных устройствах).
Первая применена для связи наиболее важных устройств, агрегатов двигателя, трансмиссии, тормозов, подвесок, систем безопасности. Вторая обслуживает второстепенные функции комфорта и сервиса.
Это не значит, что системы автономны. Они связаны между собой через шлюз, обычно находящийся в приборной панели. Низкоскоростная линия также имеет свои контакты в диагностическом разъёме, записанные в стандарт.
Сделано так, чтобы системы низшего уровня важности не мешали максимально быстрому обмену приоритетных устройств. А большое быстродействие, например, регулировке сидений ни к чему.
На низшем уровне могут работать ещё более простые шины, однопроводные и низкоскоростные. Они подключаются к общей CAN через свой контроллер.
Например, в двери могут стоять стеклоподъёмники, блок кнопок управления, различные датчики, всё это нет необходимости выводить на общую шину. Но и плодить множество проводов тоже. Используются простейшие контроллеры и однопроводная сеть.
Как подключиться и сделать диагностику автомобиля
Сканеры могут внедряться в протокол шины и анализировать её состояние, а также проходящую информацию. Можно использовать виртуальные устройства, эмулирующие отдельные блоки, а также создавать и передавать тестовые команды отдельным участникам сети.
Для связи используются специальные адаптеры USB-CAN, более сложные устройства и программное обеспечение.
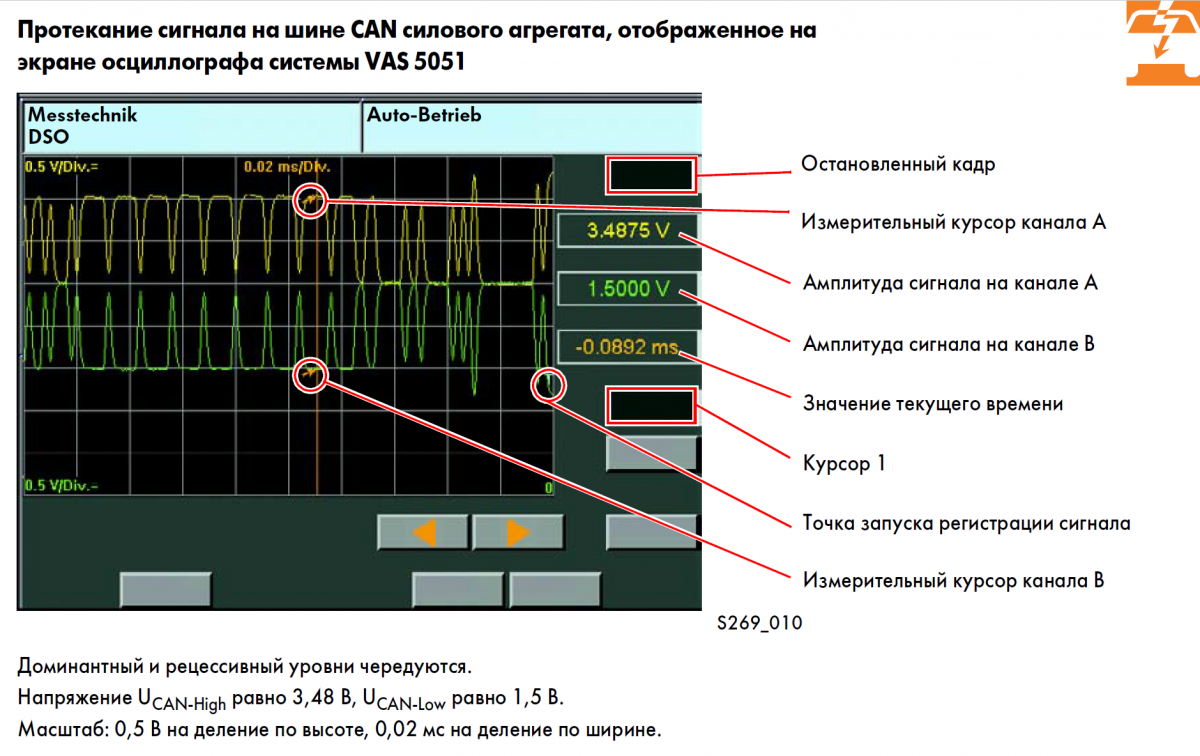
До появления профессиональных CAN-анализаторов и тестеров пользовались скоростным запоминающим осциллографом и логическим анализатором.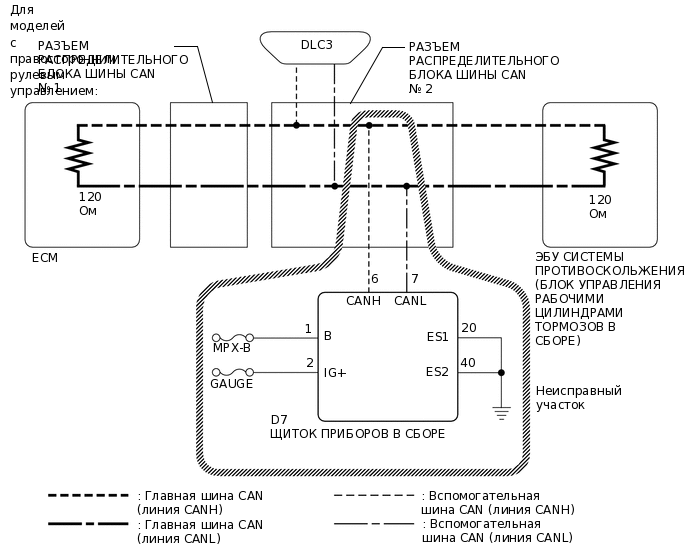
Эти приборы тоже способны сохранять и предоставлять для изучения отдельные фреймы CAN, но в работе неудобны, требуют больших затрат времени.
Неисправности
Отказы шины обычно сводятся к нескольким типовым случаям:
- пропадание питания отдельных устройств;
- повреждения проводки и разъёмов;
- отказ контроллеров.
Базой всей сетевой периферии является современная микроэлектроника и большие интегральные контроллеры серийного производства, поэтому надёжность оборудования в целом достаточно высока. Но поиски проблемного блока иногда бывают долгими из-за параллельного их подключения и размещения по всему автомобилю.
Плюсы и минусы встроенных шин
Сейчас уже трудно представить себе автомобиль с достойным набором современных опций без информационной шины, а конкурентоспособность требует ещё и высокого быстродействия.
CAN-шина всё это обеспечивает:
- имеется автоматический контроль проходящей информации на ошибки;
- дифференциальная передача сигналов и использование витой пары даёт хорошую скорость и защиту от помех;
- стандартизация протоколов упрощает диагностику и поиск неисправностей;
- построение системы приоритетов упрощает проектирование;
- все устройства функционально закончены и универсальны.
Но со временем усугубляются и недостатки. Так, усложнение автомобилей привело к тому, что быстродействия даже самых последних версий уже не хватает.
Поэтому в настоящее время эту самую распространённую автомобильную шину уже можно считать устаревшей, новые проекты обладают значительно более высоким быстродействием.
Что такое CAN шина?
Что такое CAN шина?
Современные автомобили с электронными бортовыми системами состоят из огромного количества управляющих, исполнительных устройств и блоков управления, датчиков, контроллеров. Соответственно, наличие большого количества электронных систем предусматривает и наличие большого количества проводов. Кроме того, возникает необходимость применения коммуникационной системы, которая могла бы обеспечить обмен всеми данными между электронными устройствами и блоками управления. Данная задача была решена в 80-х годах, когда был разработан цифровой интерфейс CAN – Controller Area Network.
Применение can шины на автомобилях с электронной бортовой системой позволило:
- объединить работу отдельных узлов и устройств;
- применять большое количество различных блоков управления;
- обеспечить быстрый обмен информацией между всеми устройствами;
- создать эффективную защиту электронных систем от внешнего воздействия.
CAN шина представляет собой связующее звено в электронной системе современного автомобиля, служащее для обмена информацией. Это своего рода сетевой интерфейс, разработанный специально для обеспечения более эффективной и слаженной работы автоматических систем в автомобиле. Она позволяет подключать различные устройства, способные одновременно принимать и передавать цифровую информацию с очень высокой скоростью.
Применение can шины позволило значительно снизить влияние электромагнитных полей внешнего характера на работу электронных систем автомобиля.
Само устройство шины представляет собой витую пару проводов, по которым и обеспечивается передача данных.
К can шине можно подключать большое количество устройств, число которых теоретически неограниченно, но по факту в среднем достигает в количестве чуть более шестидесяти. В настоящее время ведется разработка can шин, которые позволили бы подключать гораздо большее количество устройств и при этом обеспечивали бы максимально высокую скорость передачи данных.
Основные характеристики can шины:
- скорость обмена информацией 1Мбит/c;
- система обнаружения ошибок и неисправностей во время обмена информацией;
- работа в режиме реального времени;
- высокая устойчивость против возникновения помех.
Принцип работы can шины.
Can система обладает мультифункциональными возможностями. Все узлы системы могут передавать информацию одновременно и в то же время некоторые узлы могут осуществлять запрос шины. Специальный передатчик, анализируя поступающие данные, передает их на все узлы системы. Каждый из имеющихся узлов самостоятельно определяет необходимость обработки поступающей информации. Передатчик присваивает каждому потоку информации на отдельные узлы идентификатор, имеющий определенный приоритет. Именно на основе этого идентификатора узлы системы определяют важность поступающей информации.
Все узлы системы могут передавать информацию одновременно и в то же время некоторые узлы могут осуществлять запрос шины. Специальный передатчик, анализируя поступающие данные, передает их на все узлы системы. Каждый из имеющихся узлов самостоятельно определяет необходимость обработки поступающей информации. Передатчик присваивает каждому потоку информации на отдельные узлы идентификатор, имеющий определенный приоритет. Именно на основе этого идентификатора узлы системы определяют важность поступающей информации.
Одна из главных особенностей can шины заключается в надежности передачи и обработки всей информации. Специальный can контролер регистрирует имеющиеся ошибки и неисправности. Происходит обработка ошибок и неисправностей, в результате которой узел, в котором обнаружена ошибка, будет отключен от общего соединения.
Конструктивные особенности can шины.
На сегодняшний день can шины реализуются на основе трех видов проводов:
- витая пара проводов;
- шлейф;
- оптоволокно.
Первый и второй вид отличаются более низкой стоимостью, но и соответственно более низкой скоростью передачи данных. Оптоволокно обеспечивает максимально высокую скорость передачи данных. Шины с оптоволокном устанавливаются на автомобили представительского класса и класса люкс. Они отличаются большей надежностью и более длительным сроком службы. С другой стороны представляют собой и более сложную систему в области проведения ремонта или диагностики в отличие от шины из витых пар или в виде шлейфа. Если поврежденный, порвавшийся провод не составляет сложности спаять и устранить неполадки, то с оптоволокном дела обстоят сложнее, и не каждый специалист возьмет на себя такую ответственность.
Применение can шины позволило исключить необходимость использования большого количества проводов в электронной системе автомобиля для соединения блоков управления и узлов передачи данных. Современные автомобили становятся все более совершенными, количество блоков управления постоянно расширяется и в этом случае установка can шины становится уже крайней необходимостью. Даже самый простой автомобиль, на котором установлены стандартные автоматические системы, нуждается в централизованном обмене данными, не говоря уже об автомобилях класса люкс.
Даже самый простой автомобиль, на котором установлены стандартные автоматические системы, нуждается в централизованном обмене данными, не говоря уже об автомобилях класса люкс.
Диагностика can шины.
К главным преимуществам can шины необходимо отнести возможность проведения быстрой и достаточно простой диагностики всей системы автомобиля. Шина имеет единый разъем, который позволяет подключить устройства для диагностики.
Однако кроме проведения диагностики автомобиля, сама шина также может быть подвержена различным видам повреждений, которые требуют исправления.
Основными неисправностями шины являются разрыв проводов и помехи. В системе шины предусмотрена функция самодиагностики. Все неисправности, возникающие во время работы системы, записываются, соответственно каждая неисправность имеет свой собственный код. Это позволяет при подключении сканера легко устранить большую часть неполадок в шине, используя коды неисправностей.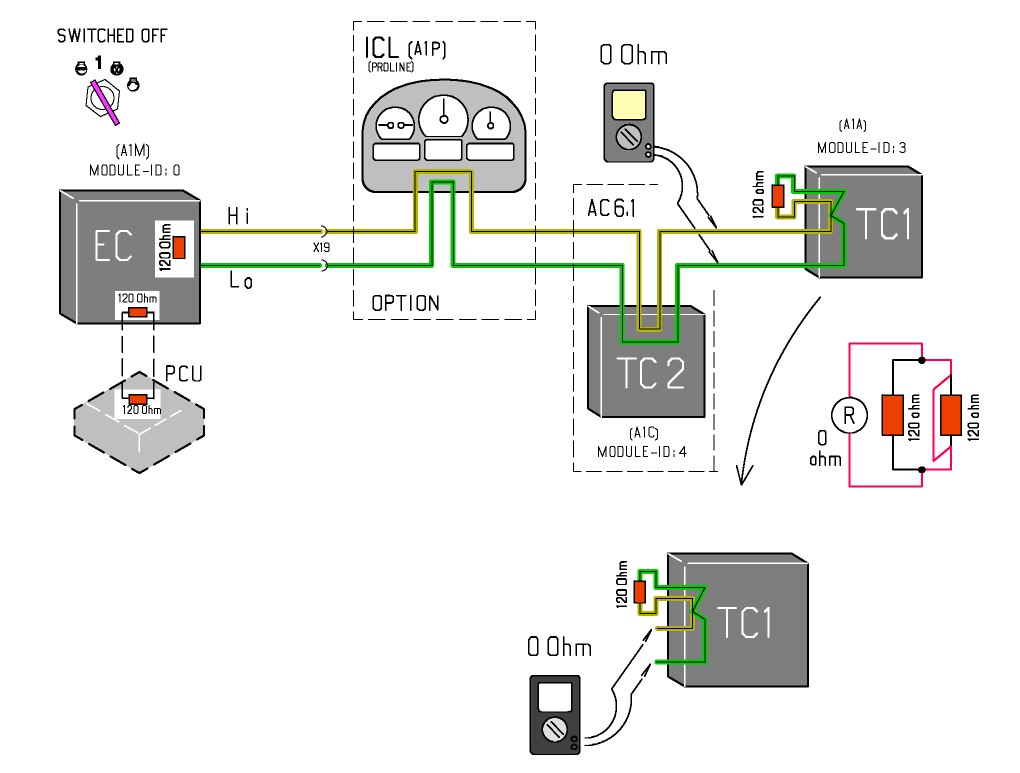
В связи с тем, что can шины не универсальны, так как отсутствует единый стандарт их применения, для облегчения работы с ними разработаны специальные универсальные адаптеры. Адаптер для can шины облегчает подключение устройств для диагностики и осуществления других операций на различных моделях автомобилей.
Что такое шина CAN и какую роль она играет в автомобильных системах?
Автор Nischay Khanna
Современный автомобиль может иметь на борту более 70 компьютеров. Вот как эти системы общаются друг с другом.
Кредиты изображения: Автомобили Fiat Chrysler/FlickrВы сели в свою машину, нажали на кнопку запуска, и двигатель мгновенно ожил, но как ваша машина решила, должна она заводиться или нет?
Ну и чтобы машина завелась, несколько антенн и Электронных Блоков Управления связывались с брелоком. Протокол Controller Area Network (CAN) обеспечивает надлежащую связь между вашим брелком, антеннами и ЭБУ внутри вашего автомобиля.
Так что же такое протокол CAN и как он помогает устройствам систем вашего автомобиля работать вместе? Что ж, давайте узнаем.
Что такое протокол CAN и зачем он нужен?
Раньше в автомобилях было мало электроники. На самом деле, если вы хотели завести свой автомобиль в начале 1900-х годов, вам приходилось выходить из машины и проворачивать двигатель вручную.
Современные автомобили, наоборот, имеют несколько электронных датчиков, и электронные устройства следят за всем, от температуры в салоне до оборотов коленчатого вала.
Тем не менее, данные, полученные от этих датчиков, не представляют никакой ценности, пока не будут обработаны. Эта обработка данных выполняется вычислительными устройствами, известными как электронные блоки управления (ECU).
Изображение предоставлено: SenseiAlan/FlickrВ отличие от компьютера с одним процессором, в автомобиле есть несколько ЭБУ, каждый из которых отвечает за выполнение определенной задачи. Хотя эти ECU могут эффективно выполнять одну задачу, они должны работать вместе, чтобы обеспечить правильную работу таких функций, как ABS и ESC.
В связи с этим необходимо подключить все ЭБУ автомобиля. Для выполнения этих соединений можно использовать топологию «точка-точка», где каждый блок управления двигателем напрямую подключается к каждому другому блоку управления двигателем. Однако такая архитектура сделает систему сложной. Фактически, современный автомобиль имеет более 70 блоков управления двигателем, и соединение их один к одному увеличило бы вес проводки в геометрической прогрессии.
Чтобы решить эту проблему, компания Bosch вместе с Mercedes-Benz и Intel в 19 году создала протокол Controller Area Network.86. Этот протокол позволял ЭБУ связываться друг с другом с помощью общей шины данных, известной как шина CAN.
Как работает CAN?
Протокол CAN представляет собой основанную на сообщениях методологию связи, основанную на наборе кабелей витой пары для передачи данных. Эти провода известны как CAN high и CAN low.
Чтобы обеспечить передачу данных по этим проводам, их уровни напряжения изменены. Эти изменения уровней напряжения затем преобразуются в логические уровни, позволяющие ЭБУ автомобиля взаимодействовать друг с другом.
Изображение предоставлено: Spinningspark/WikimediaДля передачи логической единицы по шине CAN напряжение обеих линий установлено на 2,5 вольта. Это состояние также известно как рецессивное состояние, что означает, что шина CAN доступна для использования любым ЭБУ.
Наоборот, по шине CAN передается логический 0, когда на линии CAN high находится напряжение 3,5 вольт, а на линии CAN low 1,5 вольт. Это состояние шины также известно как доминирующее состояние, которое сообщает каждому ECU в системе, что другой ECU передает, поэтому они должны дождаться окончания передачи, прежде чем начать передачу своего сообщения.
Это состояние шины также известно как доминирующее состояние, которое сообщает каждому ECU в системе, что другой ECU передает, поэтому они должны дождаться окончания передачи, прежде чем начать передачу своего сообщения.
Чтобы разрешить эти изменения напряжения, ЭБУ автомобиля подключаются к шине CAN через приемопередатчик CAN и контроллер CAN. Приемопередатчик отвечает за преобразование уровней напряжения на шине CAN в уровни, понятные ЭБУ. Контроллер, с другой стороны, используется для управления полученными данными и обеспечения выполнения требований протокола.
Все эти ЭБУ, подключенные к CAN-шине, могут передавать данные по витому кабелю, но есть одна загвоздка, по CAN-шине может передаваться только сообщение с наивысшим приоритетом. Чтобы понять, как ЭБУ передает данные по шине CAN, нам необходимо понять структуру сообщений протокола CAN.
Понимание структуры сообщений протокола CAN
Всякий раз, когда два ЭБУ хотят обмениваться данными, по шине CAN передаются сообщения с приведенной ниже структурой.
Эти сообщения передаются путем изменения уровней напряжения на шине CAN, а конструкция витой пары проводов CAN предотвращает повреждение данных во время передачи.
- SOF: Сокращено от Start Of Frame, бит SOF представляет собой кадр данных с одним доминирующим битом. Этот бит передается узлом, когда он хочет отправить данные по шине CAN.
- Идентификатор: Идентификатор в протоколе CAN может иметь размер 11 или 29 бит. Размер идентификатора зависит от версии используемого протокола CAN. Если используется расширенная версия CAN, то размер идентификатора составляет 29 бит, а в остальных случаях размер идентификатора составляет 11 бит. Основная цель идентификатора — определить приоритет сообщения.
- RTR: Запрос удаленной передачи или RTR используется узлом, когда данные необходимо запросить у другого узла. Для этого узел, которому нужны данные, отправляет сообщение с рецессивным битом в кадре RTR на предполагаемый узел.

- DLC: Код длины данных определяет размер данных, передаваемых в поле данных.
- Поле данных: Это поле содержит полезные данные. Размер этой полезной нагрузки составляет 8 байт, но более новые протоколы, такие как CAN FD, увеличивают размер этой полезной нагрузки до 64 байт.
- CRC: Сокращено от Cyclic Redundancy Check, поле CRC представляет собой кадр проверки ошибок. То же самое имеет размер 15 бит и вычисляется как приемником, так и передатчиком. Передающий узел создает CRC для данных при передаче. При получении данных получатель вычисляет CRC для полученных данных. Если оба CRC совпадают, целостность данных подтверждается. Если нет, данные содержат ошибки.
- Поле подтверждения: Как только данные получены и не содержат ошибок, принимающий узел вводит доминантный бит в кадр подтверждения и отправляет его обратно передатчику. Это сообщает передатчику, что данные были получены и не содержат ошибок.

- Конец кадра: После завершения передачи данных передаются семь последовательных рецессивных битов. Это гарантирует, что все узлы знают, что узел завершил передачу данных, и они могут передавать данные по шине.
В дополнение к битам, указанным выше, протокол CAN имеет несколько битов, зарезервированных для использования в будущем.
Упрощение CAN на примере
Теперь, когда у нас есть общее представление о том, как выглядит сообщение на шине CAN, мы можем понять, как данные передаются между различными ЭБУ.
Для простоты предположим, что в нашем автомобиле есть 3 ЭБУ: Узел 1, Узел 2 и Узел 3. Из трех ЭБУ Узел 1 и Узел 2 хотят обмениваться данными с Узлом 3.
Давайте посмотрим, как работает протокол CAN. помогает обеспечить связь в таком сценарии.
- Определение состояния шины: Все ЭБУ автомобиля подключены к CAN-шине. В нашем примере Узел 1 и Узел 2 хотят отправить данные на другой ЭБУ; перед этим оба ЭБУ должны проверить состояние шины CAN.
 Если шина находится в доминирующем состоянии, то ЭБУ не могут передавать данные, поскольку шина используется. С другой стороны, если шина находится в рецессивном состоянии, ЭБУ могут передавать данные.
Если шина находится в доминирующем состоянии, то ЭБУ не могут передавать данные, поскольку шина используется. С другой стороны, если шина находится в рецессивном состоянии, ЭБУ могут передавать данные. - Отправка начала кадра: Если дифференциальное напряжение на шине CAN равно нулю, узел 1 и узел 2 изменяют состояние шины на доминирующее. Для этого напряжение CAN high поднимают до 3,5 вольт, а напряжение CAN low уменьшают до 1,5 вольт.
- Определение того, какой узел может получить доступ к шине: После отправки SOF оба узла конкурируют за доступ к шине CAN. Шина CAN использует протокол множественного доступа/обнаружения коллизий с контролем несущей (CSMA/CD), чтобы решить, какой узел получит доступ. Этот протокол сравнивает идентификаторы, переданные обоими узлами, и дает доступ к тому, у которого более высокий приоритет.
- Отправка данных: Как только узел получает доступ к шине, поле данных вместе с CRC отправляется получателю.

- Проверка и завершение связи: При получении данных Узел 3 проверяет CRC полученных данных. Если ошибок нет, узел 3 отправляет сообщение CAN передающему узлу с доминантным битом в кадре подтверждения вместе с EOF для прекращения связи.
Различные типы CAN
Хотя структура сообщения, используемая протоколом CAN, остается прежней, скорость передачи данных и размер битов данных изменены для передачи данных с большей пропускной способностью.
Из-за этих различий протокол CAN имеет разные версии, и их обзор приведен ниже:
- Высокоскоростной CAN: Данные по проводам CAN передаются последовательно, и эта передача может быть выполнена по разным тарифам. Для высокоскоростного CAN эта скорость составляет 1 Мбит/с. Из-за этой высокой скорости передачи данных высокоскоростные могут использоваться для ЭБУ, которые управляют силовым агрегатом и системами безопасности.
- Низкоскоростная CAN: В случае низкоскоростной CAN скорость передачи данных снижается до 125 кбит/с.
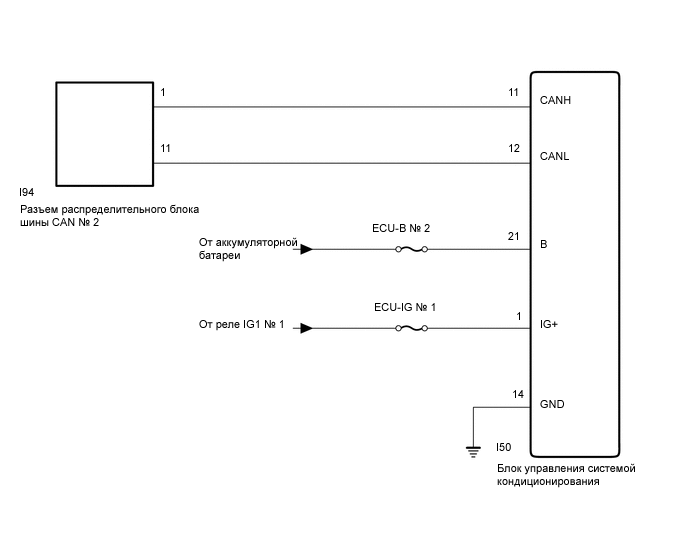
 Поскольку низкая скорость может обеспечить более низкую скорость передачи данных, она используется для подключения ЭБУ, которые управляют комфортом пассажира, например, кондиционер или информационно-развлекательная система.
Поскольку низкая скорость может обеспечить более низкую скорость передачи данных, она используется для подключения ЭБУ, которые управляют комфортом пассажира, например, кондиционер или информационно-развлекательная система. - Can FD: Сокращение от CAN с гибкой скоростью передачи данных. CAN FD — это новейшая версия протокола CAN. Он увеличивает размер кадра данных до 64 байт и позволяет блокам управления передавать данные со скоростью от 1 Мбит/с до 8 Мбит/с. Эта скорость передачи данных может управляться ЭБУ в режиме реального времени в зависимости от системных требований, что позволяет передавать данные на более высоких скоростях.
Каково будущее автомобильной связи?
Протокол CAN позволяет нескольким ЭБУ связываться друг с другом. Эта связь обеспечивает такие функции безопасности, как электронный контроль устойчивости и усовершенствованные системы помощи водителю, такие как обнаружение слепых зон и адаптивный круиз-контроль.
Тем не менее, с появлением дополнительных функций, таких как автономное вождение, объем данных, передаваемых по шине CAN, увеличивается в геометрической прогрессии. Чтобы включить эти функции, на рынок выходят более новые версии протокола CAN, такие как CAN FD.
Чтобы включить эти функции, на рынок выходят более новые версии протокола CAN, такие как CAN FD.
Подписывайтесь на нашу новостную рассылку
Связанные темы
- Описание технологии
Об авторе
Технический энтузиаст, движимый любопытством. Выпускник факультета электроники и коммуникаций, который последние 2 года объяснял, как работают повседневные технологии, и в прошлом работал с несколькими технологическими публикациями.
Работая инженером в Stellanis, Нишай обладает глубокими знаниями в области автомобильной электроники и старается упростить технологию для всех.
CAN-ШИНА (СЕТЬ КОНТРОЛЛЕРОВ)
Общее описание
Шина CAN — это автомобильная шина, разработанная Bosch, позволяющая микроконтроллерам и устройствам взаимодействовать друг с другом в автомобиле без главного компьютера. Шина CAN — это протокол на основе сообщений, разработанный специально для автомобильных приложений, но теперь также используемый в других областях, таких как аэрокосмическая промышленность, промышленная автоматизация и медицинское оборудование. Он стал международным стандартом (ISO 11898) в 1994 году и был специально разработан для быстрого последовательного обмена данными между электронными контроллерами в автомобилях. Он соединяет отдельные системы и датчики в качестве альтернативы традиционным многопроволочным ткацким станкам. Он позволяет автомобильным компонентам обмениваться данными по однопроводной или двухпроводной сетевой шине данных со скоростью до 1 Мбит/с. Шина CAN
Шина CAN — это протокол на основе сообщений, разработанный специально для автомобильных приложений, но теперь также используемый в других областях, таких как аэрокосмическая промышленность, промышленная автоматизация и медицинское оборудование. Он стал международным стандартом (ISO 11898) в 1994 году и был специально разработан для быстрого последовательного обмена данными между электронными контроллерами в автомобилях. Он соединяет отдельные системы и датчики в качестве альтернативы традиционным многопроволочным ткацким станкам. Он позволяет автомобильным компонентам обмениваться данными по однопроводной или двухпроводной сетевой шине данных со скоростью до 1 Мбит/с. Шина CAN
— один из пяти протоколов, используемых в стандарте диагностики автомобилей OBD-II.
Внешний вид
Рис.1 Автомобильная сеть CAN BUS
Принцип работы шины CAN
Шина CAN использует для связи два выделенных провода. Провода называются CAN high и CAN low. Контроллер CAN подключается ко всем компонентам в сети через эти два провода. Каждый сетевой узел имеет уникальный идентификатор. Все ЭБУ на шине фактически параллельны, поэтому все узлы постоянно видят все данные. Узел отвечает только тогда, когда обнаруживает свой собственный идентификатор. Отдельные узлы могут быть удалены из сети, не затрагивая другие узлы.
Контроллер CAN подключается ко всем компонентам в сети через эти два провода. Каждый сетевой узел имеет уникальный идентификатор. Все ЭБУ на шине фактически параллельны, поэтому все узлы постоянно видят все данные. Узел отвечает только тогда, когда обнаруживает свой собственный идентификатор. Отдельные узлы могут быть удалены из сети, не затрагивая другие узлы.
Когда шина CAN находится в режиме ожидания, на обе линии подается напряжение 2,5 В. Когда биты данных передаются, верхняя линия CAN достигает 3,75 В, а нижняя линия CAN падает до 1,25 В, тем самым создавая разницу в 2,5 В между линиями: каждая из линий CAN ссылается на другую, а не на массу автомобиля. . Поскольку связь зависит от разницы напряжений между двумя линиями шины, шина CAN НЕ чувствительна к индуктивным пикам, электрическим полям или другим помехам. Это делает шину CAN надежным выбором для сетевой связи на мобильном оборудовании.
Рис.2
Питание по CAN может подаваться через CAN-шину.![]() Или питание для модулей шины CAN может быть организовано отдельно. Проводка источника питания может быть либо полностью отделена от линий шины CAN, в результате чего для сети используются два 2-проводных кабеля, либо она может быть интегрирована в тот же кабель, что и линии шины CAN, в результате чего получается один 4-проводной кабель.
Или питание для модулей шины CAN может быть организовано отдельно. Проводка источника питания может быть либо полностью отделена от линий шины CAN, в результате чего для сети используются два 2-проводных кабеля, либо она может быть интегрирована в тот же кабель, что и линии шины CAN, в результате чего получается один 4-проводной кабель.
Характер обмена данными по шине CAN позволяет всем модулям передавать и получать данные по шине. Любой модуль может передавать данные, которые получают все остальные модули. Очень важно, чтобы полоса пропускания шины CAN в первую очередь выделялась наиболее важным для безопасности системам. Узлы обычно назначаются одному из нескольких уровней приоритета. Например, органы управления двигателем, тормоза и подушки безопасности очень важны с точки зрения безопасности, и командам на активацию этих систем отдается наивысший приоритет. Это означает, что они будут действовать раньше, чем менее критичные. Аудиоустройства и навигационные устройства часто имеют средний приоритет, а активация освещения может иметь самый низкий приоритет. Процесс, известный как арбитраж, определяет приоритет любых сообщений.
Процесс, известный как арбитраж, определяет приоритет любых сообщений.
Большинство автомобильных сетей CAN работают со скоростью шины 250 кБ/с или 500 кБ/с. В новейших автомобилях используется до 3 отдельных сетей CAN, обычно с разной скоростью, соединенных между собой шлюзами. Данные одной из трех сетей доступны для двух других сетей. Функции управления двигателем обычно выполняются на высокоскоростной шине со скоростью 500 кбит/с, а системы шасси работают на более медленной шине CAN со скоростью 250 кбит/с. Другие функции, такие как освещение, спутниковая навигация и зеркала, находятся на отдельной низкоскоростной однопроводной шине LIN (Local Interconnect Network).
Процедура проверки надежности шины CAN с помощью осциллографа
- Определите контакты CAN-H и CAN-L в доступной точке сети CAN.
Такой точкой обычно является многоконтактный разъем ЭБУ. - Установите входы осциллографа на 5 В
- Подсоедините измерительный провод сигнала одного из каналов осциллографа к проводу CAN-H.
