


Что такое CAN шина автомобиля. Список поддерживаемых автомобилей
Что такое CAN шина.
История появления CAN началась в середине 80-х годов прошлого века. Компания bosсh совместно с компанией intel разработали новый цифровой интерфейс для передачи данных — Controller Area Network (CAN).
Аналоговое подключение сигнализации (без CAN шины)
Зачем нужна CAN шина в автомобиле.
CAN шина позволяет соединить между собой любое количество датчиков, контроллеров, исполнительных элементов и прочих блоков, находящихся в автомобиле (например: системы ABS,SRS AIRBAG, ESP, иммобилайзер, блок управления двигателем, климат, КПП, центральный замок, свет, подвеска, приборная панель и т.д… ) в дуплексном режиме (приём и передача данных) со скоростью до 1 Мбит/с. При этом сама can шина состоит всего из двух проводов (витая пара). Ранее для соединения блоков необходимо было использовать сотни проводов т.к. передача единицы информации от блока к блоку осуществлялась по отдельному проводу.
Установка сигнализации по CAN шине
Автосигнализации c CAN модулем.
CAN модуль
Современные автосигнализации производятся с интегрированным CAN модулем, что позволяет подключать автомобильную сигнализацию непосредственно к цифровой шине автомобиля CAN. Автосигнализация получает в цифровом виде информацию о состоянии концевиков, замков, зажигания, ручника, тахометра и т.д. а также может управлять замками дверей, стеклоподъемниками, люком, штатной сигнализацией и некоторыми другими системами автомобиля.
Список поддерживаемых автомобилей (в частности системами StarLine).
Выбирайте подходящую сигнализацию:
С АВТОЗАПУСКОМ | БЕЗ АВТОЗАПУСКА
Любую более подробную информацию Вы можете получить у специалистов Доп-Центра, позвонив по телефону: (495) 363-40-07
подключение сигнализации своими руками с автозапуском по кан устройству и видео о принципе работы
Для того чтобы упорядочить работу всех контроллеров, которые облегчают управление и повышают контроль вождения автомобилем, используется CAN-шина.
Подключить такое устройство к сигнализации машины можно своими руками.
Что такое CAN-шина и принцип ее работы
КАН-шина представляет собой сеть контроллеров. Устройство используется для объединения всех управляющих модулей автомобиля в одну рабочую сеть с общим проводом. Этот девайс состоит из одной пары кабелей, которая называется CAN. Информация, передающаяся по каналам из одного модуля на другой, отправляется в закодированном виде.
Схема подключения устройств к CAN-шине в МерседесеКакие функции может выполнять CAN-шина:
- подключение к автомобильной бортовой сети любых девайсов и устройств;
- упрощение алгоритма подсоединения и функционирования вспомогательных систем машины;
- блок может одновременно получать и передавать цифровые данные из разных источников;
- использование шины снижает воздействие внешних электромагнитных полей на функционирование основных и вспомогательных систем машины;
- CAN-шина позволяет ускорить процедуру передачи информации к определенным устройствам и узлам автомобиля.
Эта система работает в нескольких режимах:
- Фоновый. Все устройства отключены, но на шину подается питание. Величина напряжения слишком мала, поэтому разрядить аккумуляторную батарею шина не сможет.
- Режим запуска. Когда автолюбитель вставляет ключ в замок и проворачивает его либо жмет кнопку Старта, происходит активация устройства. Включается опция стабилизации питания, которое подается на контроллеры и датчики.
- Активный режим. В этом случае между всеми контроллерами и датчиками происходит обмен данными. При работе в активном режиме параметр потребления энергии может быть увеличен до 85 мА.
- Режим засыпания или отключения. При глушении силового агрегата контроллеры КАН перестают функционировать. При включении режима засыпания все узлы машины отключаются от бортовой сети.
Канал Виалон СУшка в своем видео рассказал о КАН-шине и что надо знать про ее эксплуатацию.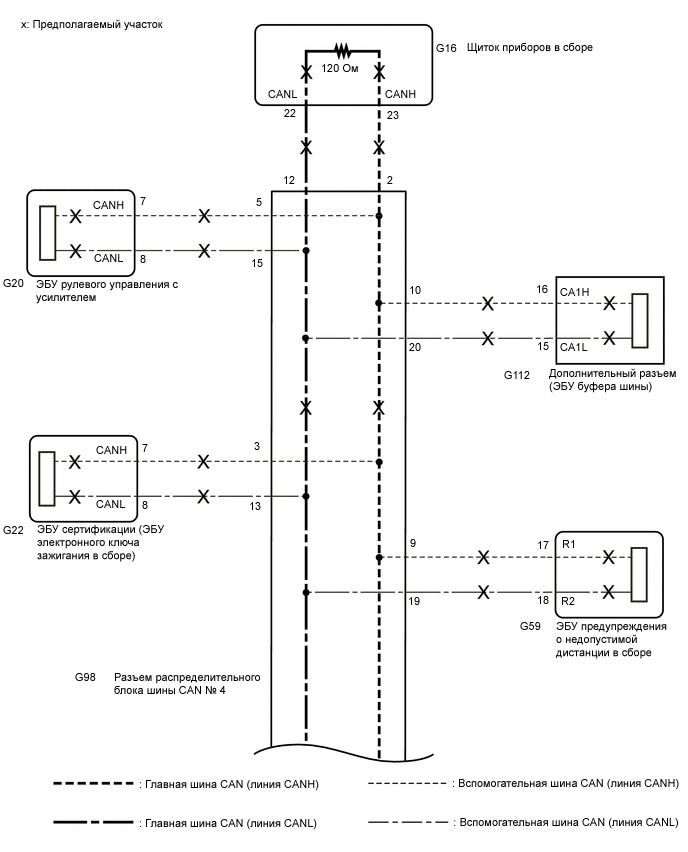
Плюсы и минусы
Какими преимуществами обладает КАН-шина:
- Простота установки устройства в автомобиль. Владельцу машины не придется тратиться на монтаж, поскольку выполнить эту задачу можно самостоятельно.
- Быстродействие устройства. Девайс позволяет быстро обмениваться информацией между системами.
- Устойчивость к воздействию помех.
- Все шины обладают многоуровневой системой контроля. Ее использование дает возможность предотвратить появление ошибок при передаче и приеме данных.
- В процессе функционирования шина автоматически разбрасывает скорость по разным каналам. Это позволяет обеспечить оптимальную работу всех систем.
- Высокая безопасность устройства, при надобности система блокирует несанкционированный доступ.
- Большой выбор устройств различных типов от разных производителей. Можно подобрать вариант, предназначенный для конкретной модели авто.
Какие недостатки характерны для устройства:
- В девайсах бывают ограничения по объему передаваемых данных. В современных автомобилях используется множество электронных девайсов. Их большое количество приводит к высокой загруженности канала передачи информации. Это становится причиной увеличения времени отклика.
- Большая часть отправляющихся по шине данных обладает конкретным назначением. На полезную информацию отводится маленькая часть трафика.
- При использовании протокола высшего уровня автовладелец может столкнуться с проблемой отсутствия стандартизации.
Виды и маркировки
Самым популярным типом шин являются устройства, разработанные Робертом Бошем. Девайс может функционировать последовательно, то есть сигнал передается за сигналом. Такие устройства называются Serial BUS. В продаже можно встретить и параллельные шины Parallel BUS. В них передача данных осуществляется по нескольким каналам связи.
О разновидностях, принципе действия, а также возможностях КАН-шины можно узнать из видео, снятого каналом DIYorDIE.
С учетом разных типов идентификаторов можно выделить несколько видов устройств:
- КАН2, 0А Актив. Так маркируются устройства, которые поддерживают 11-битный формат обмена данными. Эти узлы не обозначают ошибки на импульсы 29-битного узла.
- КАН2, 0В Актив. Так маркируются девайсы, функционирующие в 11-битном формате. Основное отличие заключается в том, что при обнаружении идентификатора на 29 бит в системе они будут передавать на управляющий модуль сообщение об ошибке.
Надо учесть, что в современных машинах такие типы устройств не применяются. Это связано с тем, что работа системы должна быть согласованной и логичной. А в данном случае она может функционировать при нескольких скоростях передачи импульсов – на 125 либо 250 кбит/с. Более низкая скорость используется для управления дополнительных устройств, таких как осветительные приборы в салоне, электрические стеклоподъемники, стеклоочистители и т. д. Высокая скорость нужна для обеспечения рабочего состояния трансмиссии, силового агрегата, системы ABS и т. д.
Разновидность функций шин
Рассмотрим, какие существуют функции у различных девайсов.
Девайс для автомобильного двигателя
При соединении устройства обеспечивается быстрый канал передачи данных, по которому информация распространяется со скоростью 500 кбит/с. Основное предназначение шины заключается в синхронизации работы управляющего модуля, к примеру, коробки передач и мотора.
Устройство типа Комфорт
Скорость передачи данных по этому каналу более низкая и составляет 100 кбит/с. Функция такой шины заключается в соединении всех устройств, относящихся к данному классу.
Информационно-командный девайс
Скорость передачи данных такая же, как и в случае с устройствами типа Комфорт. Главная задача шины заключается в обеспечении связи между обслуживающимися узлами, к примеру, мобильным девайсом и системой навигации.
Главная задача шины заключается в обеспечении связи между обслуживающимися узлами, к примеру, мобильным девайсом и системой навигации.
Шины от разных производителей приведены на фото.
1. Устройство для автомобильного ДВС 2. Интерфейсный анализаторМогут ли быть проблемы в работе CAN-шин?
В современном авто цифровая шина используется постоянно. Она работает одновременно с несколькими системами, причем по ее каналам связи постоянно передается информация. Со временем в работе устройства могут возникнуть неполадки. В результате анализатор данных будет функционировать неверно. При обнаружении неполадок автовладелец должен найти причину.
По каким причинам возникают сбои в работе:
- повреждение или обрыв электроцепей устройства;
- произошло замыкание в системе на аккумулятор либо массу;
- могли замкнуть системы КАН-Хай или КАН-Лоу;
- произошло повреждение прорезиненых перемычек;
- разряд аккумуляторной батареи или снижение напряжения в бортовой сети, вызванное некорректной работой генераторного устройства;
- произошла поломка катушки зажигания.
При поиске причин учитывайте, что неисправность может заключаться в некорректной работе вспомогательных устройств, устанавливающихся дополнительно. К примеру, причина может заключаться в неправильном функционировании противоугонной системы, контроллеров и девайсов.
О ремонте CAN-шины приборной панели в автомобиле Форд Фокус 2 можно узнать из ролика, снятого пользователем Brock – Video Corporation.
Процесс поиска неисправности осуществляется так:
- Сначала автовладелец производит диагностику состояния системы. Целесообразно осуществить компьютерную проверку, чтобы выявить все неполадки.
- На следующем этапе производится диагностика уровня напряжения и сопротивления электрических цепей.
- Если все в порядке, то проверяется параметр сопротивления прорезиненых перемычек.
Диагностика работоспособности КАН-шины требует определенных навыков и опыта, поэтому процедуру поиска неисправностей лучше доверить специалистам.
Как подключить сигнализацию по CAN-шине
Для подключения КАН-шины своими руками к автосигнализации машины с автозапуском либо без него надо знать, где находится блок управления противоугонной системой. Если установка сигнализации осуществлялась самостоятельно, то процесс поиска не вызовет сложностей у автовладельца. Управляющий модуль обычно ставится под приборной панелью в районе рулевого колеса либо за контрольным щитком.
Как произвести процедуру подключения:
- Противоугонная система должна быть установлена и подключена ко всем узлам и элементам.
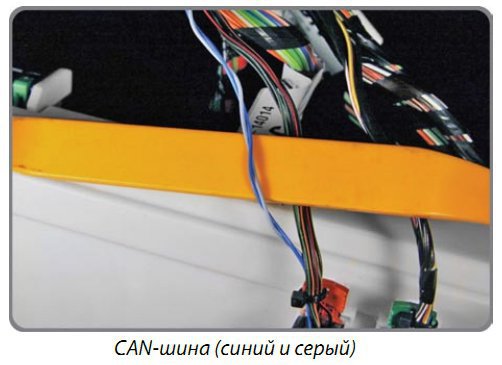
- Найдите толстый кабель оранжевого цвета, он подключается к цифровой шине.
- Адаптер противоугонной системы подсоединяется к контакту найденной шины.
- Производится монтаж устройства в надежном и удобном месте, девайс фиксируется. Надо заизолировать все электрические цепи, чтобы не допустить их перетирания и утечки тока. Производится диагностика правильности выполненной задачи.
- На завершающем этапе настраиваются все каналы для обеспечения рабочего состояния системы. Также надо задать функциональный ряд устройству.
Видео «Пример подключения КАН-шины»
Пользователь Alexander Bast в видеоролике показал на примере автомобиля Фольксваген Поло, как производится процедура подключения шины к бортовой сети автомобиля.
Центр диагностики | Информация о шинах CAN | Значения
Центр диагностики | Информация о шинах CAN | Значения | Состояние шины CAN и количество ошибокСодержание
Возможны четыре состояния шины CAN.
Активное: шина CAN работает без проблем.
Пассивное: возникли пассивные ошибки.
Предупреждение: зарегистрированы ошибки «Предупреждение о шине».
Отключена: зарегистрированы ошибки «Шина отключена».
При возникновении любой из этих ошибок на дисплее регистрируется, сколько раз это произошло.
Число пассивных ошибок
Число предупреждений о шине
Число отключений шины
Кроме того, на дисплее регистрируется число ошибок из-за переполнения.
Число пассивных ошибок
Если это значение больше нуля, значит, на шине CAN имеется какой-либо контроллер, который не получил всех сообщений. Важная информация могла быть потеряна.
Наиболее вероятной причиной этого является высокий коэффициент использования шины CAN.
Проверьте электропроводку и разъемы на отсутствие проблем с соединениями. Если проблем с проводкой нет, выполните «холодную» перезагрузку. Если проблема не устраняется, обратитесь к дилеру John Deere.
Число предупреждений о шине
Если это значение больше нуля, значит, на шине CAN имеется какой-либо контроллер, работающий со сбоями.
Проверьте электропроводку и разъемы на отсутствие проблем с соединениями. Если проблем с проводкой нет, выполните «холодную» перезагрузку. Если проблема не устраняется, обратитесь к дилеру John Deere.
Число отключений шины
Если это значение больше нуля, значит, на шине CAN имеется какой-либо контроллер, работающий со сбоями. Он пропустил определенное количество сообщений и теперь вообще перестал получать сообщения. Важная информация была потеряна.
Эта ошибка чаще всего возникает при высоком коэффициенте использования шины CAN.
Проверьте электропроводку и разъемы на отсутствие проблем с соединениями. Если проблем с проводкой нет, выполните «холодную» перезагрузку.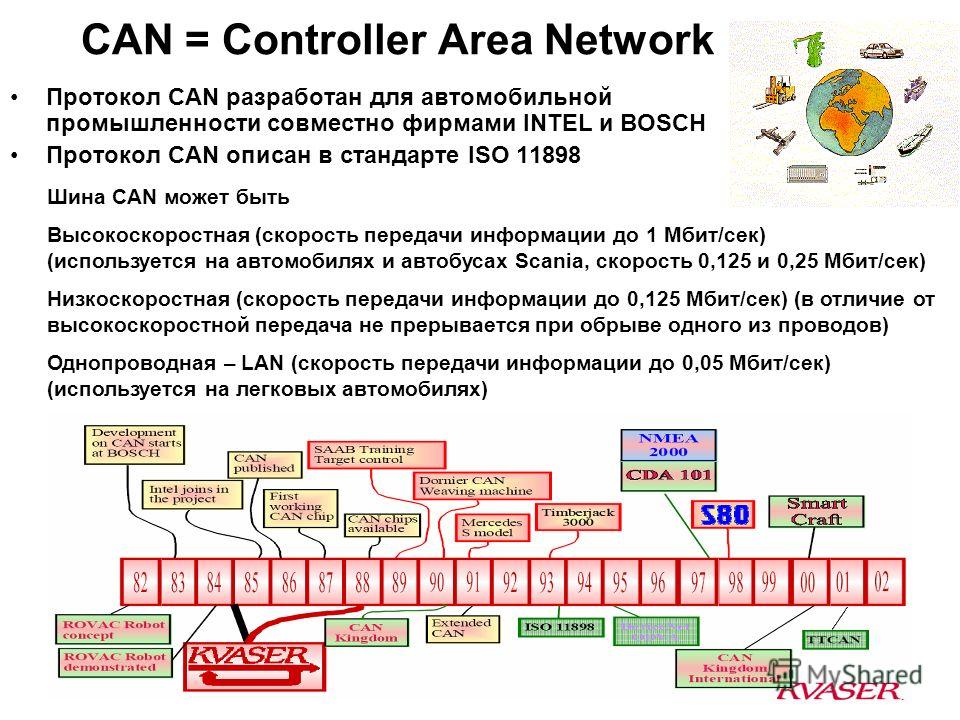 Если проблема не устраняется, обратитесь к дилеру John Deere.
Если проблема не устраняется, обратитесь к дилеру John Deere.
Число ошибок из-за переполнения
Число ошибок из-за переполнения указывает на то, что приложения или контроллеры на шине CAN получают сообщения быстрее, чем способны их обрабатывать. Это приводит к пропуску важных сообщений и сбоям в работе системы.
Эта ошибка чаще всего возникает при высоком коэффициенте использования шины CAN.
Проверьте электропроводку и разъемы на отсутствие проблем с соединениями. Если проблем с проводкой нет, выполните «холодную» перезагрузку. Если это не поможет решить проблему, обратитесь к своему дилеру.
что это такое Сан шина что такое и как работает
Приветствую всех вас друзья! Эволюция человека постепенно привела к тому, что современный автомобиль в буквальном смысле слова, напичкан всевозможными датчиками и приборами. Там на «борту», как на заводе – целый коллектив. Разумеется такой «бригадой», обязательно должен кто-то управлять! Об этом руководителе я и хочу сегодня с вами поговорить, а именно, КАН-шина в автомобиле – что это, по какому принципу работает и собственно каким образом она появилась. Обо всем по порядку…
Немножко истории
Мало кто знает, что самые первые автомобили не имели абсолютно никакой электрики. Все что нужно было тогдашним водителям – это специальное магнитоэлектрическое приспособление для запуска мотора, которое способно было из кинетической выработать электроэнергию. Не мудрено, что такая примитивная система доставляла некие неудобства и соответственно постоянно модернизировалась.
Так из года в год, проводов и соответственно различных датчиков становилось все больше. Дошло до того, что по электрическому оснащению автомобиль уже начали сравнивать с самолетом. Именно тогда в 1970 году, стало очевидно – для бесперебойной работы, все цепи нужно рационализировать. Спустя 13 лет, ситуацию под свой контроль взял уже культовый бренд из Германии под названием Bosch.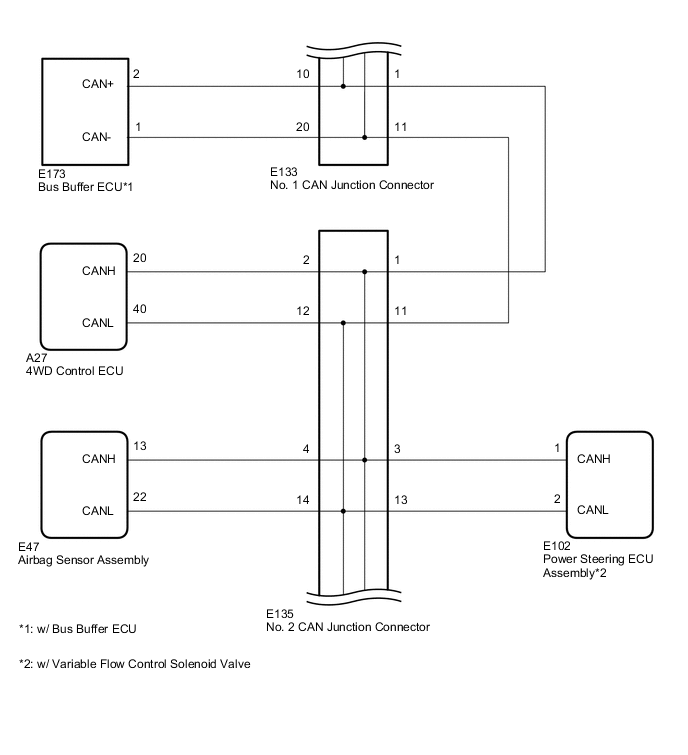 Как следствие, в 1986 году в Детройте был представлен инновационный протокол Controller Area Network (CAN).
Как следствие, в 1986 году в Детройте был представлен инновационный протокол Controller Area Network (CAN).
Однако, даже после официальной презентации, наработка оставалась мягко говоря «сыроватой», поэтому работа над ней продолжалась.
- 1987 г. – завершились практические тесты can шины, которые вызвались провести не менее знаменитые бренды в сфере компьютерных технологий Philips и Intel.
- 1988 г. – уже на следующий год еще один немецкий автогигант BMW представил первый автомобиль, работающий по технологии can шины, это была любимая всеми модель 8-серии.
- 1993 г. – международное признание и соответственно сертификат «ИСО».
- 2001 г. – кардинальные перемены в стандартах, теперь любой европейский автомобиль должен функционировать по принципу «КАН».
- 2012 г. – последнее обновление механизма, которое увеличило список совместимых устройств и скорость передачи данных.
Вот такой вот длинный путь прошел наш «директор» электрических приборов. Сами видите стаж не малый, поэтому столь высокое положение абсолютно по делу).
Определение КАН-шины
Несмотря на свой богатый функционал, визуально КАН-шина выглядит достаточно примитивно. Все ее составляющие – это чип и два провода. Хотя в самом начале своей «карьеры» (80-е года), для контакта со всеми датчиками, необходимо было более десятка штекеров. Происходило так, потому что каждый отдельный провод отвечал за один единственный сигнал, сейчас же их количество может достигать сотни. Кстати, раз мы уже упомянули датчики, рассмотрим, что именно контролирует наш механизм:
- КПП;
- Двигатель;
- Система антиблокировки;
- Подушка безопасности;
- Дворники;
- Панель приборов;
- Гидроусилитель руля;
- Котроллеры;
- Зажигание;
- Бортовой компьютер;
- Мультимедийная система;
- GPS навигация.
Сигнализация с КАН-шиной, как вы сами понимаете также сотрудничает очень тесно.
Более 80% автомобилей на территории РФ используют технологию КАН, причем даже модели отечественного автопрома!
Кроме того, современная КАН-шина может не только проверять оборудование машины, но и даже устранять некоторые сбои! А отличная изоляция всех контактов инструмента, позволяет ему полностью оградить себя от любого рода помех!
Принцип работы КАН-шины
Итак, КАН-шина – это некий проверяемый передатчик, который способный отправить информацию не только по двум витым проводкам, но и по радиосигналу. Скорость обмена информацией может достигать 1 Мбит/с, при этом задействовать шину могут одновременно несколько устройств. Кроме того, технология CAN имеет узлы персональных тактовых генераторов, что позволяет отправлять определенные сигналы всем системам автомобиля сразу!
Рабочий график нашего «вожака», выглядит следующим образом:
- Режим ожидания – абсолютно все системы выключены, электроэнергия поступает только на КАН-микрочип, который ждет команды к «Запуску».
- Запуск – CAN активирует все системы при повороте ключа в зажигании.
- Активная эксплуатация – происходит обоюдный обмен необходимой информацией, в том числе диагностической.
- Режим сна – сразу же после отключения силового агрегата, КАН-шина мгновенно прекращает свою деятельность, все системы «засыпают».
На заметку: технология CAN используется не только в машиностроении, так в системах «Умный дом» ее используют достаточно давно и судя по отзывам, чип справляется с поставленными задачами на ура!
Очевидно, что даже сегодня такому важному агрегату есть куда расти, в частности это относится к скорости передачи данных. Производители уже сейчас делают некоторые шаги в этом направлении, так например, особо смышленые уменьшают длину проводов КАН-шины, что позволяет увеличить скорость передачи до 2 Мбит/с!
Достоинства и недостатки
В завершение данной публикации, подводя так сказать черту, коротко рассмотрим все плюсы и минусы данной технологии. Разумеется, начнем с достоинств:
Разумеется, начнем с достоинств:
- Простой и недорогой монтаж;
- Быстродействие;
- Устойчивость к помехам;
- Высокий уровень безопасности от взлома;
- Огромный ассортимент на любой кошелек, подобрать нужную модель можно даже на «Запорожец»).
Что касается минусов, они тоже есть, но их не так уж и много:
- Не стандартизированный протокол высшего уровня;
- Практически весь трафик поедает информация технического и служебного назначения;
- С каждым годом выделенного объема информации, который передается одновременно становится все меньше!
Собственно, на этом все, по старой традиции, прилагаю видео в тему! В нем вы узнаете, как проверить КАН-шину и можно ли это сделать в домашних условиях. До новых встреч господа!
Сегодня я хочу познакомить вас с интересной микроконтроллерной платформой CANNY . Это обзорная статья в которой вы узнаете о технологии, а в последующих статьях я расскажу вам о работе с сообщениями CAN, интеграции CANNY c Arduino Mega Server и о тех возможностях, которые предоставляет эта связка.
Почему CANNY? От названия шины CAN, которая широко используется на транспорте и, в частности, во всех современных автомобилях в качестве бортовой сети. Итак, что же можно сделать, имея специализированный контроллер, подключённый к CAN шине вашего автомобиля?
Шина CAN
Образно говоря, шина CAN это нервная система вашего автомобиля. По ней передаётся вся информация о состоянии блоков и систем, а также управляющие команды, которые во многом определяют поведение автомобиля. Зажигание фар, открывание и закрывание дверей, управление проигрыванием музыки в салоне машины, срабатывание сигнализации и т. д. — всё это работает и управляется по этой шине.Физически, шина CAN представляет собой два перевитых провода и очень проста в монтаже и подключении. Несмотря на свою простоту, она, благодаря своей дифференциальной природе, хорошо защищена от различных наводок и помех. Высокая надежность и большая допустимая длина сети, до 1000 метров, помогла CAN завоевать широкую популярность у производителей различного, не только автомобильного оборудования.
Высокая надежность и большая допустимая длина сети, до 1000 метров, помогла CAN завоевать широкую популярность у производителей различного, не только автомобильного оборудования.
Контроллеры CANNY
Это целое семейство специализированных контроллеров, имеющих встроенную «родную» поддержку работы с шиной CAN. Это касается как «железной» части, так и поддержки на уровне «софта».Флагманом линейки является контроллер CANNY 7, наиболее мощный и имеющий максимум возможностей. Большое количество памяти, мощные выходы, позволяющие напрямую управлять реле автомобиля, интеллектуальная система защиты от коротких замыканий, защита от бросков тока и напряжения в бортовой сети автомобиля — всё это делает этот контроллер отличным решением для воплощения любых ваших идей и проектов.
Кроме CANNY 7 в линейке контроллеров присутствует ещё несколько моделей, мы будем проводить свои эксперименты с более простой встраиваемой моделью CANNY 5 Nano. Она также поддерживает работу с CAN шиной, но при этом похожа на уже знакомую нам Arduino Nano.
Визуальное программирование
Развитая поддержка шины CAN это не единственная особенность этих контроллеров, кроме этого CANNY имеют свою собственную среду программирования, CannyLab, но не «обычную», а визуальную, где весь процесс написания программ сводится к манипулированию готовыми структурными блоками, заданию их параметров и соединению входов и выходов этих блоков в определённой последовательности, в соответствии с алгоритмом решаемой задачи.
Ни одной строчки кода!
Хорошо это или плохо? На мой взгляд, это дело привычки. Мне, как человеку привыкшему к «традиционному» программированию, было непривычно манипулировать блоками, вместо написания строк кода. С другой стороны, существует множество приверженцев именно такого подхода к составлению алгоритмов и считается, что для инженеров и «не программистов» это наиболее простой и доступный метод программирования микроконтроллеров.
Мне, как минимум, было «прикольно» составлять программы таким образом и через некоторое время мне это стало даже нравиться.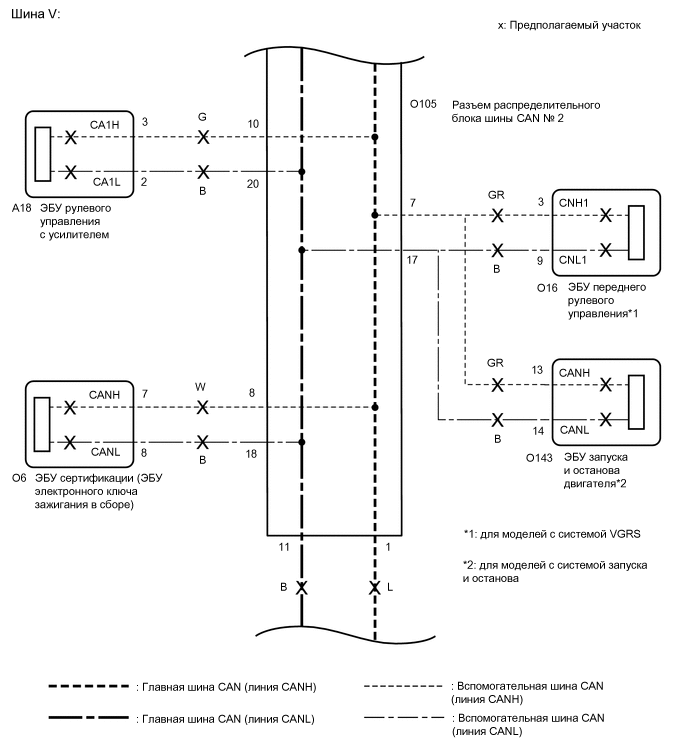 Возможно, что если продолжить этим заниматься, то через некоторое время уже написание кода покажется неудобным.
Возможно, что если продолжить этим заниматься, то через некоторое время уже написание кода покажется неудобным.
CannyLab является бесплатной средой разработки и вы можете свободно скачать её с сайта разработчиков, она также не требует специальной процедуры инсталляции — достаточно распаковать файл с архивом — и вы можете начинать работу.
Подключение
Подключение CANNY 5 Nano к компьютеру мало чем отличается от подключения контроллеров Arduino. При наличии в системе драйвера Silicon Labs CP210x, либо после его установки из скаченного дистрибутива CannyLab, Windows создаёт виртуальный COM порт и CANNY готов к работе. В моём случае понадобилось ещё перезагрузить компьютер, но возможно это особенность моей системы.Практические примеры
Давайте на простых примерах разберём, как в CannyLab выполнять действия, привычные нам в Arduino IDE. Начнём с традиционного мигания светодиодом.В контроллере CANNY 5 на выводе С4 (Channel 4) присутствует тестовый светодиод (аналог светодиода, находящегося на 13 выводе в Arduino). И его тоже можно использовать для индикации и экспериментов, чем мы и воспользуемся.
Что же нужно, чтобы помигать светодиодом в контроллере CANNY? Нужно сделать всего две вещи — сконфигурировать пин четвертого канала как выход и подать на этот выход сигнал с ШИМ генератора. Все эти действия мы уже не раз проделывали в Arduino IDE, посмотрим как это выглядит в CannyLab.
Итак, конфигурируем пин четвертого канала как выход
Настраиваем генератор ШИМ. Задаём период 500 миллисекунд, заполнение — 250 миллисекунд (то есть 50 %) и 1 (true) на входе генератора «Старт» и… всё! Больше ничего делать не нужно — программа готова, осталось только залить её в контроллер.
Режим симуляции
Тут нужно сказать пару слов о процессе симуляции на компьютере работы контроллера и заливке разработанной программы в память «железного» контроллера.Среда разработки CannyLab позволяет запускать и отлаживать программу, не записывая её в память контроллера.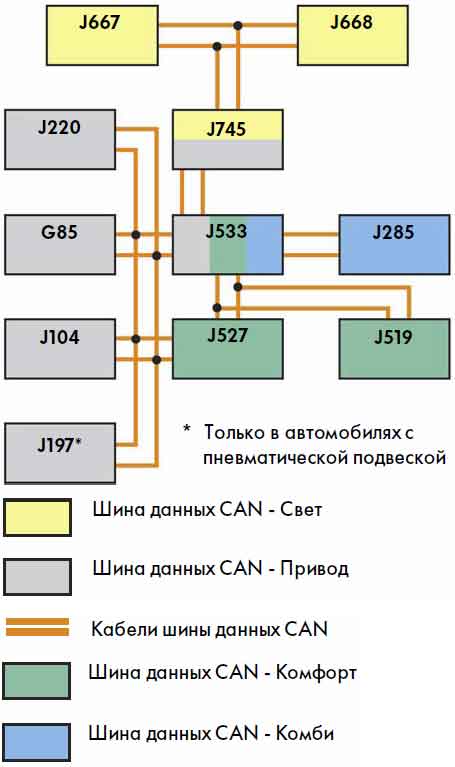 В режиме симуляции вы можете видеть результат работы программы прямо в реальном времени и даже вмешиваться в её работу.
В режиме симуляции вы можете видеть результат работы программы прямо в реальном времени и даже вмешиваться в её работу.
Заливка в контроллер
Для работы контроллеров CANNY, перед заливкой программы (в терминологии разработчиков «диаграммы») нужно сначала залить операционную систему «Устройство/Системное ПО/Записать». Это нужно сделать только один раз, для этого нужно выбрать соответствующий вашему контроллеру файл с расширением .ccx .После того, как программа написана и отлажена, её можно загрузить в ваш контроллер. Это делается просто — в меню выбираете пункт «Устройство/Диаграмма/Записать» и через несколько секунд программа оказывается записанной в контроллер.
Аналоговые входы
Для того, чтобы лучше понять принцип программирования контроллеров CANNY в среде разработке CannyLab, давайте ещё разберём пример работы с аналоговым входом в этой системе.Мы будем отслеживать уровень напряжения на 10 пине контроллера и если он находится в диапазоне 2,5 В ± 20%, будем зажигать встроенный в плату светодиод.
Как и в предыдущем примере, конфигурируем 4-й пин как выход для того, чтобы иметь возможность управлять работой светодиода.
Включаем АЦП на 10-м канале.
Блок «Логическое И» довершает работу и со своего выхода управляет работой светодиода на плате.
Вот и всё. То, что мы привычно делали на Arduino, мы легко сделали в CannyLab. Осталось только освоиться в этой среде программирования и вы сможете легко и непринуждённо создавать свои проекты на этой платформе.
Эти простые примеры составления программ даны для того, чтобы вы могли понять принцип визуального программирования микроконтроллеров CANNY. В дальнейшей работе вам поможет отличная справочная документация и поддержка разработчиков на сайте и форуме системы.
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line).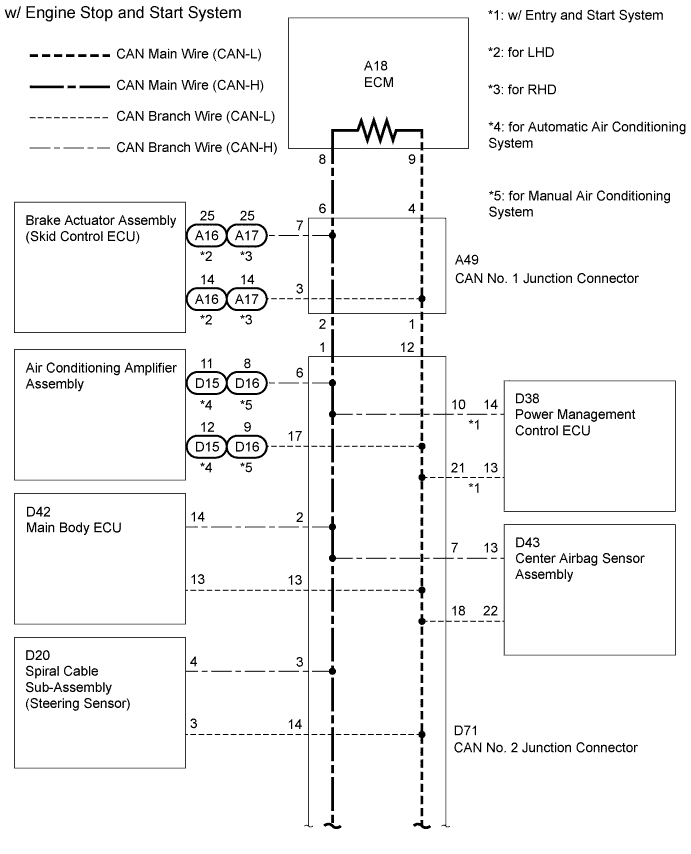 Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».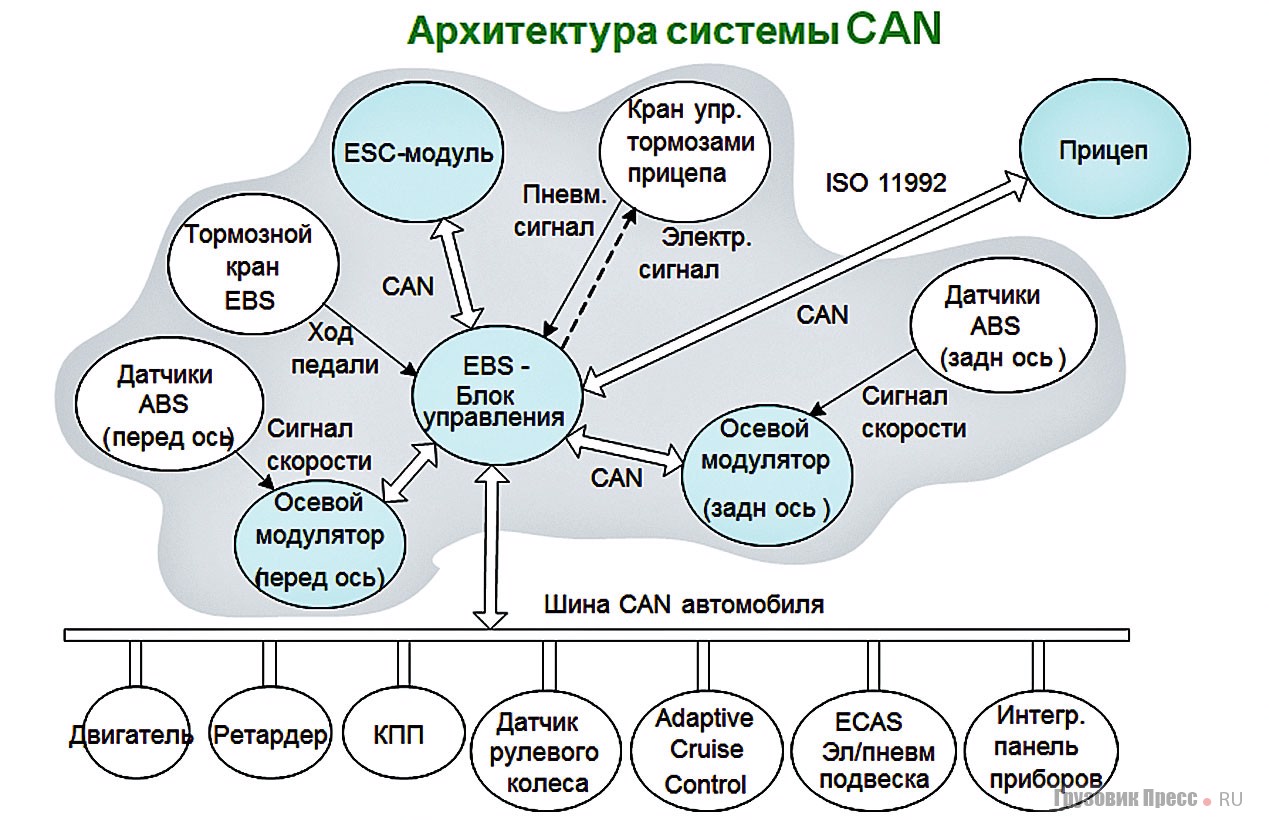
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт : на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).
Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:
Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:
Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.
«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.
Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.
Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний ) способны не только «повесить» ошибку CAN-шины, обнаруживаемую , но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.
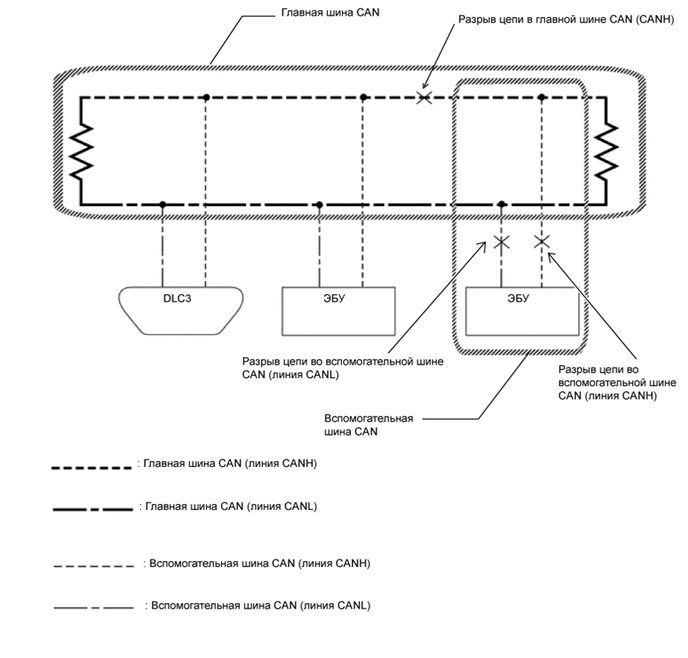
Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика.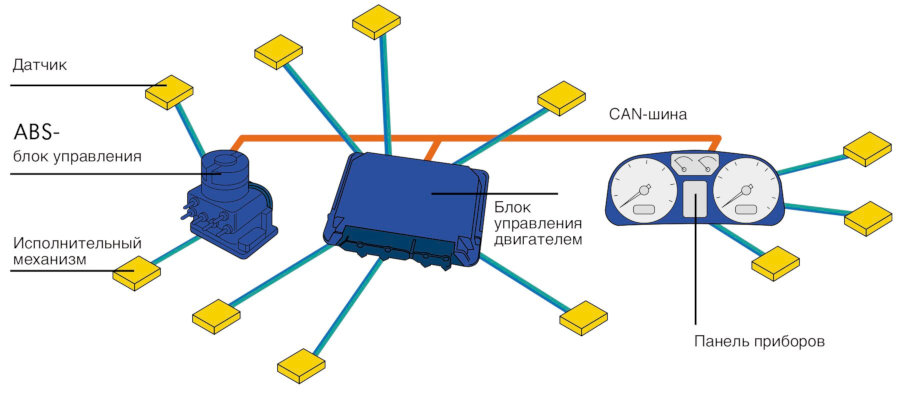 Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.
Ariel Nuñez
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.
Рисунок 1: Как при помощи приложения управлять ключевыми функциями автомобиля?
Недавно я вместе со своими друзьями из компании Voyage работал над реализацией программного управления системой кондиционирования в Ford Fusion. На данный момент Voyage занимается разработкой бюджетных самоуправляемых автомобилей. Конечная цель: чтобы каждый смог вызвать автомобиль к своей входной двери и безопасно путешествовать туда, куда вздумается. В компании Voyage считают крайне важной возможностью предоставление доступа к ключевым функциям автомобиля с заднего кресла, поскольку не за горами тот день, когда работа водителя будет полностью автоматизирована.
Зачем нужна шина CAN
Современные автомобили используют множество систем управления, которые во многих случаях функционируют подобно микро-службам в веб-разработке. Например, подушки безопасности, тормозные системы, регулирование скорости движения (круиз контроль), электроусилитель руля, аудиосистемы, управление окнами и дверями, подстройка стекл, системы зарядки для электрических автомобилей и т. д. Эти системы должны уметь осуществлять коммуникацию и считывать параметры друг друга. В 1983 в компании Bosch началась разработка шины CAN (Controller Area Network; Локальная сеть контролеров) для решения этой сложной задачи.
Можно сказать, что шина CAN представляет собой простую сеть, где каждая система автомобиля может считывать и отсылать команды. Эта шина интегрируется все сложные компоненты элегантным образом, что дает возможность реализовать всеми любимые функции автомобиля, которыми мы пользуемся.
Рисунок 2: Впервые шина CAN стала использоваться в 1988 году в БМВ 8 серии
Самоуправляемые автомобили и шина CAN
Поскольку интерес к разработке самоуправляемых автомобилей серьезно вырос, соответственно, словосочетание «шина CAN» также становится популярным. Почему? Большинство компаний, создающих самоуправляемых автомобилей, не занимаются производством с нуля, а пытаются научиться программно управлять машинами после выхода с конвейера фабрики.
Понимание внутреннего устройства шины CAN, используемой в автомобиле, позволяет инженеру формировать команды при помощи программного обеспечения. Самые нужные команды, как вы можете догадаться, связаны с управлением рулем, ускорением и торможением.
Рисунок 3: Введение в LIDAR (ключевой сенсор самоуправляемого автомобиля)
При помощи сенсоров наподобие LIDAR (light detecting and ranging; оптическая локационная система) машина способна смотреть на мир как суперчеловек. Затем компьютер внутри автомобиля на базе полученной информации принимает решения и посылается команды в шину CAN для управления рулем, ускорение и торможением.
Не каждый автомобиль способен стать самоуправляемым. И по некоторым причинам компания Voyage выбрала модель Ford Fusion (подробнее о причинах можно почитать в этой статье).
Исследование шины CAN в Ford Fusion
Перед началом исследования систем кондиционирования воздуха в Ford Fusion я открыл мою любимую книгу The Car Hacker’s Handbook . Перед погружением в суть вопроса заглянем в Главу 2 , где описываются три важные концепции: протоколы шины, шина CAN и CAN-фреймы.
Шина CAN
Шина CAN начала использоваться в американских легковых машинах и небольших грузовиках с 1994 года и с 2008 года в обязательном порядке (в европейских автомобилях с 2001 года). В этой шине предусмотрено два провода: CAN high (CANH) и CAN low (CANL). Шина CAN использует дифференциальный сигналинг, суть которого заключается в том, что при поступлении сигнала на одном проводе вольтаж повышается, а на другом понижается на одну и ту же величину. Дифференциальный сигналинг используется в средах, которые должны быть малочувствительны к шуму, например, в автомобильных системах или при производстве.
Рисунок 4: Необработанный сигнал шины CAN, отображаемый на осциллографе
С другой стороны, пакеты, передаваемые по шине CAN, не стандартизированы . Каждый пакет содержит 4 ключевых элемента:
- Арбитражный ID (Arbitration ID ) представляет собой широковещательно сообщение, идентифицирующее устройство, которое пытается начать коммуникацию. Любое устройство может отсылать несколько арбитражных ID. Если в единицу времени по шине отсылаются два CAN-пакета, пропускается тот, у которого ниже арбитражный ID.
- Расширение идентификатора (Identifier extension ; IDE ) – в случае с шиной CAN стандартной конфигурации этот бит всегда равен 0.
- Код длины данных (Data length code ; DLC ) определяет размер данных, который варьируется от 0 до 8 байт.
- Данные. Максимальный размер данных, переносимых стандартной шиной CAN, может быть до 8 байт. В некоторых системах происходит принудительное дополнение пакета до размера 8 байт.
Рисунок 5: Формат стандартных CAN-пакетов
CAN фреймы
Для того чтобы включить / выключить климатическую систему мы должны найти нужную шину CAN (в автомобиле таких шин несколько). В Ford Fusion есть как минимум 4 задокументированные шины. 3 шины работают на высокой скорости 500 кбит/с (High Speed CAN; HS) и 1 шина на средней скорости 125 кбит/с (Medium Speed CAN; MS).
К порту OBD-II подключено две высокоскоростные шины HS1 и HS2, однако там стоит защита, которая не позволяет подделывать команды. Вместе с Аланом из компании Voyage мы вынули порт OBD-II и нашли места соединения со всеми шинами (HS1, HS2, HS3 и MS). На задней стенке OBD-II все шины подключались к модулю шлюза (Gateway Module).
Рисунок 6: Homer – первое самоуправляемое такси от компании Voyage
Поскольку климатическая система управляется через медиа-интерфейс (SYNC), нам придется отсылать команды через среднескоростную шину (MS).
Чтение и запись CAN-пакетов осуществляется при помощи драйвера и сетевого стека SocketCAN , созданного исследовательским отделом компании Volkswagen для ядра в Linux .
Мы будем подсоединять три провода от машины (GND, MSCANH, MSCANL) к переходнику Kvaser Leaf Light HSv2 (можно купить за 300$ на Амазоне) или к CANable (продается за 25$ на Tindie) и загружать на компьютере со свежим Linux-ядром шину CAN в качестве сетевого устройства.
Modprobe can
modprobe kvaser_usb
ip link set can0 type can bitrate 1250000
ifconfig can0 up
После загрузки запускаем команду candump can0 и начинаем отслеживать трафик:
Can0 33A 00 00 00 00 00 00 00 00 can0 415 00 00 C4 FB 0F FE 0F FE can0 346 00 00 00 03 03 00 C0 00 can0 348 00 00 00 00 00 00 00 00 can0 167 72 7F FF 10 00 19 F8 00 can0 3E0 00 00 00 00 80 00 00 00 can0 167 72 7F FF 10 00 19 F7 00 can0 34E 00 00 00 00 00 00 00 00 can0 358 00 00 00 00 00 00 00 00 can0 3A4 00 00 00 00 00 00 00 00 can0 216 00 00 00 00 82 00 00 00 can0 3AC FF FF FF FF FF FF FF FF can0 415 00 00 C8 FA 0F FE 0F FE can0 083 00 00 00 00 00 01 7E F4 can0 2FD D4 00 E3 C1 08 52 00 00 can0 3BC 0C 00 08 96 01 BB 27 00 can0 167 72 7F FF 10 00 19 F7 00 can0 3BE 00 20 AE EC D2 03 54 00 can0 333 00 00 00 00 00 00 00 00 can0 42A D6 5B 70 E0 00 00 00 00 can0 42C 05 51 54 00 90 46 A4 00 can0 33B 00 00 00 00 00 00 00 00 can0 42E 93 00 00 E1 78 03 CD 40 can0 42F 7D 04 00 2E 66 04 01 77 can0 167 72 7F FF 10 00 19 F7 00 can0 3E7 00 00 00 00 00 00 00 00 can0 216 00 00 00 00 82 00 00 00 can0 415 00 00 CC F9 0F FE 0F FE can0 3A5 00 00 00 00 00 00 00 00 can0 3AD FF FF FF FF FF FF FF FF can0 50B 1E 12 00 00 00 00 00 00
Несмотря на то, что вышеуказанная информация эквивалентна амплитуде звукового сигнала, довольно трудно понять, что происходит, и обнаружить какие-либо закономерности. Нам нужно нечто похожее на частотный анализатор, и такой эквивалент есть в виде утилиты cansniffer. Cansniffer показывает список идентификаторов и позволяет отслеживать изменения в секции данных внутри CAN-фрейма. По мере того как мы будем изучать определенные идентификаторы, мы можем установить фильтр нужных ID, которые имеют отношение к нашей задаче.
Нам нужно нечто похожее на частотный анализатор, и такой эквивалент есть в виде утилиты cansniffer. Cansniffer показывает список идентификаторов и позволяет отслеживать изменения в секции данных внутри CAN-фрейма. По мере того как мы будем изучать определенные идентификаторы, мы можем установить фильтр нужных ID, которые имеют отношение к нашей задаче.
На рисунке ниже показан пример информации, снятой при помощи cansniffer с шины MS. Мы отфильтровали все, что имеет отношение к идентификаторам 355, 356 и 358. После нажатия и отпускания кнопок, связанных с подстройкой температуры, в самом конце появляется значение 001C00000000.
Рисунок 7: Информация с шины MS, снятая при помощи утилиты cansniffer
Далее необходимо объединить функционал для управления климатической системой с компьютером, работающим внутри автомобиля. Компьютер работает на операционной системе ROS (Robot Operating System; Операционная система для роботов). Поскольку мы используем SocketCAN, то модуль socketcan_bridge серьезно упрощает задачу по преобразованию CAN-фрейма в блок информации, понимаемый операционной системой ROS.
Ниже показан пример алгоритма декодирования:
If frame.id == 0x356:
raw_data = unpack(«BBBBBBBB», frame.data)
fan_speed = raw_data / 4
driver_temp = parse_temperature(raw_data)
passenger_temp = parse_temperature(raw_data)
Полученные данные хранятся в CelsiusReport.msg:
Bool auto
bool system_on
bool unit_on
bool dual
bool max_cool
bool max_defrost
bool recirculation
bool head_fan
bool feet_fan
bool front_defrost
bool rear_defrost
string driver_temp
string passenger_temp
После нажатия всех нужных кнопок в машине, у нас появляется следующий список:
CONTROL_CODES = {
«ac_toggle»: 0x5C,
«ac_unit_toggle»: 0x14,
«max_ac_toggle»: 0x38,
«recirculation_toggle»: 0x3C,
«dual_temperature_toggle»: 0x18,
«passenger_temp_up»: 0x24,
«passenger_temp_down»: 0x28,
«driver_temp_up»: 0x1C,
«driver_temp_down»: 0x20,
«auto»: 0x34,
«wheel_heat_toggle»: 0x78,
«defrost_max_toggle»: 0x64,
«defrost_toggle»: 0x4C,
«rear_defrost_toggle»: 0x58,
«body_fan_toggle»: 0x04,
«feet_fan_toggle»: 0x0C,
«fan_up»: 0x2C,
«fan_down»: 0x30,
}
Затем эти строки отсылаются на узел под управлением операционной системы ROS и далее происходит трансляция в коды, понимаемые автомобилем:
Rostopic pub /celsius_control celsius/CelsiusControl ac_toggle
Заключение
Теперь мы можем создавать и посылать те же самые коды в шину CAN, которые формируются при нажатии физических кнопок, связанных с повышением и понижением температуры, что дает возможность удаленного изменения температуры автомобиля при помощи приложения, когда мы находимся на заднем сидении автомобиля.
Рисунок 8: Удаленное управление климатической системой автомобиля
Это лишь небольшой шаг при создании самоуправляемого такси вместе со специалистами компании Voyage . Я получил массу положительных эмоций во время работы над этим проектом. Если вы тоже интересуетесь этой темой, можете ознакомиться со списком вакансий в компании Voyage.
Что такое CAN шина.
История появления CAN началась в середине 80-х годов прошлого века. Компания bosсh совместно с компанией intel разработали новый цифровой интерфейс для передачи данных — Controller Area Network (CAN).
Аналоговое подключение сигнализации (без CAN шины)
Зачем нужна CAN шина в автомобиле.
CAN шина позволяет соединить между собой любое количество датчиков, контроллеров, исполнительных элементов и прочих блоков, находящихся в автомобиле (например: системы ABS,SRS AIRBAG, ESP, иммобилайзер, блок управления двигателем, климат, КПП, центральный замок, свет, подвеска, приборная панель и т.д…) в дуплексном режиме (приём и передача данных) со скоростью до 1 Мбит/с. При этом сама can шина состоит всего из двух проводов (витая пара). Ранее для соединения блоков необходимо было использовать сотни проводов т.к. передача единицы информации от блока к блоку осуществлялась по отдельному проводу.
Установка сигнализации по CAN шине
Автосигнализации c CAN модулем.
CAN модуль
Современные автосигнализации производятся с интегрированным CAN модулем, что позволяет подключать автомобильную сигнализацию непосредственно к цифровой шине автомобиля CAN. Автосигнализация получает в цифровом виде информацию о состоянии концевиков, замков, зажигания, ручника, тахометра и т.д. а также может управлять замками дверей, стеклоподъемниками, люком, штатной сигнализацией и некоторыми другими системами автомобиля. позволяет значительно сократить вмешательство в штатную электропроводку (подключения производятся всего к 6-8 проводам, вместо 15-20 в варианте без использования can шины) и позволяет избежать проблем с гарантией на электрооборудование автомобиля.
Беспилотный автомобиль StarLine
УПРАВЛЕНИЕ АВТОМОБИЛЕМ ПО CAN
Введение
Беспилотный автомобиль StarLine на платформе Lexus RX 450h — научно-исследовательский проект, стартовавший в 2018 году. Проект открыт для амбициозных специалистов из Open Source Community. Мы предлагаем всем желающим поучаствовать в процессе разработки на уровне кода, опробовать свои алгоритмы на реальном автомобиле, оснащенном дорогостоящим оборудованием. Для управления автомобилем было решено использовать Apollo, открытый фреймворк. Для работы Apollo нам необходимо было подключить набор модулей. Эти модули помогают программе получать информацию об автомобиле и управлять им по заданным алгоритмам.
К таким модулям относятся:
- модуль позиционирования автомобиля в пространстве с помощью GPS-координат;
- модуль управления рулем, ускорением и торможением авто;
- модуль состояния систем автомобиля: скорость, ускорение, положение руля, нажатие на педали и т.д.;
- модуль получения информации об окружении автомобиля. С этим справятся ультразвуковые датчики, камеры, радары и лидары.
Прежде всего перед нашей командой стояла задача научиться управлять рулем, ускорением и торможением автомобиля. А также получать информацию о состоянии систем автомобиля. Для этого была проведена большая работу по изучению CAN-шины Lexus.
Теоретическая часть
Что такое CAN-шина
В современных автомобилях управление всеми системами взяли на себя электронные блоки (Рис. 1.). Электронные блоки — это специализированные компьютеры, каждый из которых имеет все необходимые интерфейсы для интеграции с автомобилем. С помощью цифровых интерфейсов связи, блоки объединяются в сеть для обмена информацией друг с другом. Самые распространенные цифровые интерфейсы в автомобилях — CAN, LIN, FLEXRay. Из них наибольшее распространение получил именно CAN.
CAN (Controller Area Network) шина — это промышленный стандарт сети. В 1986 году этот стандарт разработали в компании Bosch. А первым автомобилем с CAN-шиной стал Mercedes-Benz W140, выпущенный в 1991 году. Стандарт разрабатывался для возможности устройствам общаться друг с другом без хоста. Обмен информацией осуществляется с помощью специальных сообщений, которые состоят из полей ID, длины сообщения и данных. Каждый блок имеет свой набор ID. При этом приоритет на шине имеет сообщение с меньшим ID. Поле данных может нести информацию, например, о состоянии систем и датчиков, команды управления механизмами и т.д.
На физическом уровне шина представляет собой витую пару из медных проводников. Сигнал передается дифференциально, за счет чего достигается высокая помехоустойчивость.
Рис. 2. Физическое представление сигнала в CAN шинеПосредством CAN шины можно получать информацию о состоянии различных датчиков и системах автомобиля. Также по CAN можно управлять узлами автомобиля. Именно эти возможности мы и используем для своего проекта.
Мы выбрали Lexus RX, потому что знали, что сможем управлять всеми необходимыми узлами по CAN. Так как самое сложное при исследовании автомобиля — это закрытые протоколы. Поэтому одной из причин выбора именно этой модели авто стало наличие описания части протокола CAN-шины в opensource-проекте Openpilot.
Правильно управлять автомобилем — означает понимать, как работают механические части систем автомобиля. Нам было необходимо хорошо понимать, как правильно работать с электроусилителем или управлять замедлением автомобиля. Ведь, например, при повороте колеса создают сопротивление на рулевое управление, что вносит свои ограничения на управление при повороте. Некоторые системы невозможно использовать без ввода авто в специальные рабочие режимы. Эти и другие детали нам пришлось изучать в процессе работы.
Электроусилитель руля
Электроусилитель руля EPS (Electric Power Steering) — система, предназначенная снизить усилие на руль при повороте (Рис. 3). Приставка «электро» говорит о типе системы — электрическая. Управление рулем с этой системой становится комфортным, водитель поворачивает руль в нужном направлении, а электродвигатель помогает довернуть его до необходимого угла.
3). Приставка «электро» говорит о типе системы — электрическая. Управление рулем с этой системой становится комфортным, водитель поворачивает руль в нужном направлении, а электродвигатель помогает довернуть его до необходимого угла.
Электроусилитель устанавливается на рулевой вал автомобиля, части которого соединены между собой торсионным валом. На торсионный вал устанавливается датчик величины крутящего момента (Torque Sensor). При вращении руля происходит скручивание торсионного вала, которое регистрируется датчиком момента. Данные, полученные от датчика момента, датчиков скорости и оборотов коленвала, поступают в электронный блок управления ECU. А ECU, в свою очередь, уже вычисляет необходимое компенсационное усилие и подает команду на электродвигатель усилителя.
Рис. 3. Схематичное изображение системы электроусилителя руляВидео: cистема LKA рулит автомобилем с помощью системы EPS.
Электронная педаль газа
Дроссельная заслонка — это механизм регулировки количества топливной смеси, которая попадет в двигатель. Чем больше смеси попадет, тем быстрее едет автомобиль.
Электронная педаль газа — это система, которая задействует работу нескольких электронных узлов. Сигнал о положении педали, при ее нажатии, поступает в блок управления двигателем ECM (Engine Control Module). ECM, на основе этого сигнала, рассчитывает необходимое количество топлива, которое нужно подать в двигатель. В зависимости от необходимого количества топлива, ECM регулирует угол открытия дроссельной заслонки.
Видео: Для работы круиз-контроля используется управление электронной педалью газа.
Электронные системы помощи водителю
Мы купили автомобиль, который оборудован множеством цифровых блоков и систем помощи водителю (ADAS). В нашем проекте мы используем LKA, ACC и PCS.
LKA (Lane Keep Assist) — это система удержания в полосе, которая состоит из фронтальной камеры и вычислительного блока. LKA удерживает автомобиль в полосе движения, когда водитель, например, отвлекся. Алгоритмы в вычислительном блоке получают данные от камеры и на их основе принимают решение о состоянии автомобиля на дороге. Система способна понимать, что автомобиль неконтролируемо движется к правой или левой полосе. В таких случаях подается звуковой сигнал для привлечения внимания водителя. При пересечении полосы система сама скорректирует угол поворота колес так, чтобы автомобиль остался в полосе движения. Система должна вмешиваться только в том случае, если осознает, что маневр между полосами движения не был вызван действием водителя.
ACC (Adaptive Cruise Control) — система адаптивного круиз-контроля, который позволяет выставить заданную скорость следования. Автомобиль сам ускоряется и притормаживает для поддержания нужной скорости, при этом водитель может убрать ногу с педалей газа и тормоза. Этот режим удобно использовать при езде по скоростным магистралям и автострадам. Адаптивный круиз контроль способен видеть препятствия впереди автомобиля и притормаживать для избежания столкновения с ними. Если впереди автомобиля едет другое транспортное средство с меньшей скоростью, ACC сбавит скорость и будет следовать за ним. При обнаружении статичного объекта, ACC сбавит скорость до полной остановки. Для обнаружения объектов перед автомобилем такая система использует радар с миллиметровым диапазоном длин волн. Обычно такие радары работают на частоте 24-72 ГГц и способны уверенно видеть объекты на расстоянии до 300 метров. Радар обычно установлен за передним значком на решетке радиатора.
PCS (Pre-Collision System) — система предотвращения столкновения. Система призвана предотвратить столкновение с автомобилем, который движется впереди. При неизбежности столкновения, система минимизирует урон от столкновения. Здесь так же используются радар для оценки расстояния до объекта и фронтальная камера для его распознавания. Фронт PCS прогнозирует вероятность столкновения на основе скорости автомобиля, расстояния до объекта и его скорости. Обычно у системы есть два этапа срабатывания. Первый этап — система звуком и индикацией на приборной панели оповещает об опасности водителя. Второй этап — активируется экстренное торможение с помощью системы ABS, и включаются преднатяжители ремней безопасности.
Система призвана предотвратить столкновение с автомобилем, который движется впереди. При неизбежности столкновения, система минимизирует урон от столкновения. Здесь так же используются радар для оценки расстояния до объекта и фронтальная камера для его распознавания. Фронт PCS прогнозирует вероятность столкновения на основе скорости автомобиля, расстояния до объекта и его скорости. Обычно у системы есть два этапа срабатывания. Первый этап — система звуком и индикацией на приборной панели оповещает об опасности водителя. Второй этап — активируется экстренное торможение с помощью системы ABS, и включаются преднатяжители ремней безопасности.
Практическая часть
Управление рулем
Первое, что захотелось сделать нашей команде, — это научиться рулить. Рулем в автомобиле могут управлять две системы: парковочный ассистент IPAS (Intelligent Park Assist) и LKA.
IPAS позволяет задавать напрямую угол поворота рулевого колеса в градусах. Так как в нашем автомобиле нет данной системы, проверить и освоить рулевое управление таким способом нельзя.
Поэтому мы изучили электрические схемы автомобиля и поняли, какие CAN-шины могут быть полезны. Мы подключили анализатор CAN-шины. Лог содержит файл записей сообщений в шине в хронологической последовательности. Наша задача была найти команды управления электроусилителем руля EPS (Electric Power Steering). Мы сняли лог поворота рулевого колеса из стороны в сторону, в логе смогли найти показания угла поворота и скорость вращения рулевого колеса. Ниже пример изменения данных в шине CAN. Интересующие нас данные выделены маркером.
Поворот руля влево на 360 градусов Поворот руля вправо на 270 градусовСледующим этапом мы исследовали систему удержания в полосе. Для этого мы выехали на тихую улицу и записали логи обмена между блоком удержания в полосе и DSU (Driving Support ECU). С помощью анализатора шины CAN нам удалось вычислить сообщения от системы LKA. На рисунке 6 изображена команда управления EPS.
Рис. 5. Команда управления рулем с помощью системы LKALKA управляет рулем путем задания значения момента на валу (STEER_TORQUE_CMD) рулевого колеса. Команду принимает модуль EPS. Каждое сообщение содержит в заголовке значение счетчика (COUNTER), которое инкрементируется при каждой отправке. Поле LKA_STATE содержит информацию о состоянии LKA. Для захвата управления необходимо выставлять бит STEER_REQUEST.
Сообщения, которые отвечают за работу важных систем авто, защищаются контрольной суммой (CHECKSUM) для минимизации рисков ложного срабатывания. Автомобиль проигнорирует такую команду, если сообщение содержит некорректную контрольную сумму или значение счетчика. Это встроенная производителем защита от вмешательств сторонних систем и помех в линии связи.
На графике (Рис. 6.) представлена диаграмма работы LKA. Torque Sensor — значение с датчика момента на торсионном валу. Torque Cmd — команда от LKA для управления рулем. Из картинки видно, как происходит подруливание LKA для удержания автомобиля в полосе. При переходе через ноль меняется направление поворота руля. Т.е. отрицательное значение сигнала говорит о повороте вправо, положительное — влево. Удержание команды в нуле говорит об отсутствии управления со стороны LKA. При вмешательстве водителя, система перестает выдавать управление. О вмешательстве водителя LKA узнает с помощью второго датчика момента на валу со стороны рулевого колеса.
Рис. 6. График работы системы LKAНам предстояло проверить работу команды управления рулем. С помощью модуля StarLine Сигма 10 мы подготовили прошивку для проверки управления. StarLine Сигма 10 должен выдавать в CAN-шину команды на поворот руля влево или вправо. На тот момент у нас не было графического интерфейса для управления модулем, поэтому пришлось использовать штатные средства автомобиля. Мы нашли в CAN-шине статус положения рычага круиз-контроля и запрограммировали модуль таким образом, что верхнее положение рычага приводило к повороту руля вправо, нижнее положение — к повороту влево (Рис. 7).
Рис. 7. Первые попытки рулитьНа видео видно, что управление осуществляется короткими секциями. Это возникает по нескольким причинам.
Первая из причин — это отсутствие обратной связи. Если расхождение между сигналом Torque Cmd и Torque Sensor превышает определенное значение Δ, система автоматически перестает воспринимать команды (Рис. 8). Мы настроили алгоритм на корректировку выдаваемой команды (Torque CMD) в зависимости от значения момента на валу (Torque Sensor).
Рис. 8. Расхождение сигнала приводит к ошибке работы системыСледующее ограничение связано с системой защиты встроенной в EPS. Система EPS не позволяет командами от LKA рулить в широком диапазоне. Что вполне логично, т.к. при езде по дороге резкое маневрирование не безопасно. Таким образом, при превышении порогового значения момента на валу, система LKA выдает ошибку и отключается (Рис. 9).
Рис. 9. Превышение порогового значения регулировки момента на валуНезависимо от того, активирована система LKA или нет, сообщения с командами от нее присутствуют в шине постоянно. Мы посылаем модулю EPS команду повернуть колеса с конкретным усилием влево или вправо. А в это время LKA перебивает наши посылки «пустыми» сообщениями. После нашей команды со значением момента, приходит штатная с нулевым (Рис. 10).
Рис. 10. Штатные сообщения приходят с нулевыми значениями момента и перебивают наше управлениеТогда мы, с помощью модуля StarLine Сигма 10, смогли фильтровать весь трафик от LKA и блокировать сообщения с ID 2E4, когда нам это было нужно. Это решило проблему, а нам удалось получить плавное управления рулем (Рис. 11).
Рис. 11. Плавная регулировка поворота руля без ошибокУправление газом
Система адаптивного круиз-контроля ACC управляет ускорением и торможением программно по CAN-шине. Блок управления двигателем ECU принимает команды DSU, если необходимо ускориться — активирует электронную педаль газа.2, ACCEL_CMD = 1000 (0x03E8).
Рис. 12. Команда управления ускорения/замедления автомобиляМы сняли логи со штатной системы ACC и проанализировали команды. Сравнили с имеющимся у нас описанием команд и приступили к тестированию.
Рис. 13. Лог управления ускорением/замедлением системы адаптивного круиз-контроля ACC (выделено маркером)Здесь не обошлось без трудностей. Мы выехали на дорогу с оживленным трафиком для тестирования команды ускорения. Команды управления ускорением или замедлением автомобиля работают только при активированном круиз контроле, не достаточно активировать его кнопкой. Необходимо найти движущийся впереди автомобиль и включить режим следования за ним.
Рис. 14. Активация круиз контроля происходит при наличии впереди другого траснпортного средстваС помощью модуля StarLine Сигма 10 посылаем команду ускорения, и автомобиль начинает набирать скорость. К этому моменту мы подключили графический интерфейс для управления модулем StarLine Сигма 10. Теперь мы управляем рулем, ускорением и торможением с помощью кнопок в приложении.
Команды работали до тех пор, пока не потеряли автомобиль впереди. Система круиз-контроля отключилась, а следовательно, и команды ускорения перестали работать.
Мы приступили к исследованию возможности использовать команды без активного круиз-контроля. Пришлось много времени потратить на анализ данных в шине CAN, чтобы понять как создать условия для работы команд. Нас интересовало, в первую очередь, какой блок блокирует выполнение команд ACC на ускорение или замедление. Пришлось изучить какие ID идут от DSU, LKA, радара и камеры, подсовывая липовые данные различных датчиков.
Решение пришло спустя 3 недели. К тому времени мы представляли как происходит взаимодействие блоков автомобиля, провели исследование трафика сообщений и выделили группы сообщений, посылаемых каждым блоком. За работу адаптивного круиз-контроля ACC отвечает блок Driving Support ECU (DSU). DSU выдает команды на ускорение и замедление автомобиля, и именно этот блок получает данные от радара миллиметрового диапазона. Радар сообщает DSU на каком расстоянии от машины движется объект, с какой относительной скоростью и определяет его положение по горизонтали (левее, правее или по центру).
Наша идея заключалась в подмене данных радара. Мы сняли лог следования за автомобилем, вытащили из него данные радара в момент следования. Теперь, после включения круиз-контроля, мы посылаем фейковые данные о наличии впереди идущего авто. Получается обманывать наш автомобиль, говоря что впереди движется другое авто на конкретном расстоянии.
a)
б)
Рис. 15. Активация круиза: a) попытка активировать без подмены данных радара; б) активация при подмене данных от радара.
Когда запускаем нашу обманку, на приборной панели загорается значок наличия впереди идущего автомобиля. Теперь мы можем тестировать наше управление. Запускаем команду на ускорение, и автомобиль начинает быстро ускоряться.
Как мы уже узнали, команда на ускорение и замедление одна. Поэтому тут же проверили и замедление. Поехали на на скорости с активным круиз-контролем, запустили команду на торможение, и авто сразу же замедлилось.
В итоге сейчас получается разгонять и замедлять автомобиль именно так, как нам было нужно.
Цель достигнута.
Что еще мы используем
Для создания беспилотника необходимо управление вспомогательными системами: поворотниками, стоп-сигналами, аварийной сигнализацией, клаксоном и пр. Всем этим так же можно управлять по CAN шине.
Оборудование и ПО
Для работ с автомобилем сегодня мы используем набор различного оборудования:
- Анализатор шины Marathon позволяет подключать и читать данные с двух шин одновременно. На сайте производителя анализатора есть бесплатное ПО для анализа логов. Но мы используем ПО, написанное в нашей компании для внутреннего пользования.
- Модуль StarLine Сигма 10 мы используем как платформу для работы с цифровыми интерфейсами. Модуль поддерживает CAN и LIN интерфейсы. При исследовании автомобиля пишем программы на C, зашиваем их в модуль и проверяем работу. Из модуля можем сделать сниффер трафика CAN-шины. Сниффер нам помогает понять, какие ID идут от блока или блокировать сообщения от штатных систем.
- Диагностическое оборудование Toyota/Lexus. С помощью этого оборудования можно найти команды управления системами автомобиля: поворотниками, стоп-сигналами, клаксоном, индикацией приборки.
Сегодня ведется активная работа по разработке беспилотного автомобиля, в ближайших планах реализация экстренного торможения перед препятствиями, их объезда и перестраивание маршрута автомобиля в зависимости от дорожной ситуации и указаний водителя.
Беспилотный автомобиль StarLine — это открытая площадка для объединения лучших инженерных умов России и мира с целью создания прогрессивных технологий беспилотного вождения, которые сделают наше будущее безопасным и комфортным.
GitLab проекта
CAN шина
Принцип работы
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.
Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN
Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
- Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА. - Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ. - Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА. - Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
кан-шина, кан-шина подключение
просмотров 3 930 Google+Кан-шина, что это такое?
Для завоевания рынка сбыта производители автомобилей улучшают комфортабельность и безопасность своих автомобилей, добавляя в их конструкцию всё больше и больше дополнительного электрооборудования. При этом неуклонно растёт число соединительных проводов, усложняя монтаж и обслуживание электрической проводки. Компания Bosch предложила решение этой проблемы, применив для управления всего один провод по которому от органов управления к исполнительным приборам передаётся сигнал. Для этой цели был разработан специальный интерфейс Controller Area Network (CAN) (КАН-ШИНА). Недостатком такой системы стало наличие электромагнитных помех от системы зажигания и других систем. Решение было, найдено применив вместо одного провода двух скрученных между собой проводов, так называемая витая пара.
Работа кан-шины
Рассмотрим подробнее работу CAN-шины на автомобиле. Как было описано ранее она представляет из себя витую пару, перекрученных между собой двух проводов. На автомобиле эта шина последовательная, то есть данные по ней передаются поочерёдно по одному или другому проводу. Питание электроприборов при этом осуществляется другим более толстым проводом.
Может возникнуть вопрос, для чего КАН-шина на автомобиле выполнена в виде двух проводов, если данные передаются только по одному. И почему применяется последовательный интерфейс с более низкой скоростью, чем параллельный. Для экономии материала логичнее было бы сделать одним проводом, тем более такие системы применяются в промышленности. Всё дело в электрических, электромагнитных и других помехах, которые есть на автомобиле. Эти помехи создают посторонний сигнал в шине и при применении однопроводного исполнения этот сигнал способен привести к сбою в оборудовании. Если шина выполнена в виде двух перекрученных между собой проводов, так называемая витая пара, то посторонний сигнал будет генерироваться в обоих проводах, но так как они перекручены. Приемник, получает сигнал по сигнальному проводу и убирает повторяющиеся импульсы поступающие по второму проводу.
Ещё одна особенность CAN-шины это передача данных в обе стороны, как от управляющего к исполнительному элементу, так и на оборот. То есть если от выключателя лампы на фонарь приходит сигнал на включение, то от фонаря на выключатель посылается сигнал, горит лампа или нет. Так же при передаче данных их по шине их получают всё оборудование, подключенное к ней, а не конкретное к которому адресованы эти данные.
Где применяется CAN-шина?
В иностранных автомобилях она применяется в управлении двигателем, климат контроле, сигнализации, сигнальных лампах и так далее. В отечественном автомобилестроении КАН-шина получила распространение только последнее время на ВАЗ-2170 Приора. Она соединяет блок водительской двери, блок сигнализации и блок управления электропакетом. Скорость передачи данных по такой шине может быть 250 кБит/сек, но фактически обмен данными происходит со скоростью 100 кБит/сек. Этой скорости достаточно для передачи данных в системе комфорт. Для передачи данных в системе управления двигателем скорость передачи 500 кБит/сек.
Что надо знать при поиске неисправностей систем, где применяется CAN-шина.
Основные неисправности шины можно разделить на два типа: механические и сбои связанные с электронной частью. Если неисправность связана с электроникой, то её можно найти только при наличие соответствующего оборудования или осциллографа. К механическим неисправностям можно отнести обрыв одного или обоих проводов, а так же нагрузочного сопротивления, замыкание на массу или между собой проводов шины. При проверке необходимо проверить сопротивление между проводами витой пары. Дело в том, что все оборудование имеет своё нагрузочного сопротивление, кроме того провода шины между собой так же соединяются нагрузочным сопротивлением. При этом надо учитывать, что шины системы комфорт находятся постоянно под напряжением, и при проверке необходимо снять клемму с аккумулятора. Сопротивление CAN-шины системы управления двигателем составляет примерно 50 – 70 Ом., а шина системы комфорт, информационно-командной систем может сильно отличаться в зависимости от подключённого оборудования и составлять примерно 2 – 4 кОм.
admin 16/02/2016 «Если Вы заметили ошибку в тексте, пожалуйста выделите это место мышкой и нажмите CTRL+ENTER» «Если статья была Вам полезна, поделитесь ссылкой на неё в соцсетях»UDHR — Кичуа, Чимборасо Хайленд
RUNAKUNAPAK HAYÑITA WILLAY
КАЛЛАРИ ЮЯЙ
Кавсайпи юяшпа, кишпирий, пактакай, аллпапачапи касикллакавсай тикси какпими тукуй рунакуна сумак кавсайта чаричун нишпа риксин; Shinallatak сумайкайта (дигнидад), пактапакта хайнита айллуманта мана пи кичучунми риксин.
Кавсайпи юяшпа, пиньяшпа мана риксина, рунакунапак хайнита саруй, runapura wañunakuna yuyaymi tukuysami kawsaypi sapiyashka nin.Чайми тукуйсами lIakikunata IIaktakunaman apamushka. Чаймантами рунакунака тукуй ийактакунапи капаришпа кишпиришка кавсайта юяшпа машкай калларин; вакча рунакуна, ийакта рунакуна, упаллалла кавсак рунакуна, шиташка рунакуна кишпирината мунан. Машна кай пачапи кавсаккунами кай амса, навса, милли кавсайманта лиукшината мунан. Кипака кишпий римайта, юйайта чарина кан.
Кавсайпи юяшпа, рунакунапак хайнитака, пайпак хайшими нишпа шуктак камачи лиикакуна камашка качун.Shina waKcha runakuna piñaywan hatarikpi, tikra charikkuna mana wakchakunata hawalla wichkana wasiman пушачун, мана хавала ваñучичунпаш.
Кавсайпи юяшпа, лиактапура майханпаш машияришпа, аламаришпа кимиришпа алли IIankaykunata tukuy ayllukunaman rurashpa katichun. Шина алли кавсайта тукуйкуна рунакуна чаричун.
Кавсайпи. юяшпа, тинкиришка лиактакуна хатун киллката катишпа рунакунапак тиксихайнипи юяшпа, сумайкайта руната чанишпа, kariwarmipak hayñi paktapakta kachun nishpa kutintak arinishka.Шина руна IIaktakuna allichirichun, paykunapak kawsaypash kishpirishpa kachun. Ама кутинтак амса IIакиман тикрачун нишпами тинкиришка IIактакунака кайхайнита аринишка.
Кавсайпи юяшпа, тинкиришка лиактакунапаш. пактачината минкаришпами руна хайнита каманата аринишка. Шина мамаллакта тантанакуйкуна. янапанакушпа, рунанакунапак тиксихайни, кишпирийпаш тукуй рунакунаман ~ пактачун янапанка.
Кавсайпи юяшпа, хайни юяйкуна, кишпиришка юйай куна тукуйпи тиячун, шина лиактакуна аринишка камачика, тукуйсами кавсайта чарик runakunaman pampanta paktachun.
ТИНКИРИШКА ЛЛАКТАКУНА, ХАТУН ТАНТАНАКУВТА РУРАШПА ЛЛАКТАКУНАМАН РУНАКУНАПАК ХАВИТА ВИЛЛАН
Titikirishka Ilaktakunaka, mamallaktakunapak hatun tantanakuypimi runapak hayñitaka tukuy lIaktakunaman willan. Llaktakunapak yuyay kashkamantaka, шуклашина тукушпа, тукуйпак юйай кан нишпами накаришпа пушана кан. Сапаллел рунакуна, тантаришка рунакунапаш, кишпийринапи пунчанта yuyashpami kay hayñitaka paktachina kan. Кай хайнитапаш, кишпийрина yuyaytapash yachachikwasipi, ayllukunapi, tukuy mamallaktapi kamashpami апана кан.Тинкиришка Илактакунапаш, шуктак мамаллактакунапаш runakunapak hayñita. риксишпа пайпак лиакта укупипаш пактачинами кан. Чайми руна хайнипаш, кишпирийпаш пакарикшина рикуринка. Чайми алли кавсайкуна тукуйпак чайанка.
1 ники
Тукуй рунакунами майпипаш кишпиришка, сумайкайпи (дигнидад) пактапакта Wacharin. Чай wawakunaka sumak yuyaykuna, tiksiyuyay (основной), хунтами кан; chaymantami runapuraka shukllashina tukushpa, yanaparishpa кавсана кан.
2 ники
Кай Хайнита Уилляшка Кипака Тукуй Рунакунами Има Туллпута, Кавсайта, каривармита, римайта, инийта, лиактай юйайта, майманта кашката, чарик кашката, вакча кашката, вачаришката, шуктак юйяйтапаш мана ракишпалла кишпрайта, рунахайнитапаш чарин.
Shinallatak: lIaktakak, kamachi yachak, istakak, mana paypak allpapi kawsak, чикан лиактакак, ляпиришка илактакак, сайвашка илакта какпаш, кай хатун willaypi nishkashina, kishpiriyta, runapak hayñitaka charinmi, мана чиканяшка, маньячишка канчу.
3 ники
Tukuykunami kikin kawsay, kishpiriy, kikin shayariy hayñita charin.
4 ники
Mana pipash wanachiwasipi nitishka, takashka kanachu, shinallatak mitayu лианкайпаш — мана тияначу. Тукуйсами wanachiykunakatukurirkami, чайка шами вашапи сакирирка.
5 ники
Мана пи ваташка, утушка, макашка канкачу. Мана пи, анчамиллашка ,. виваташина рикушка, кумуричишка, ляпишка канкачу.
6 ники
Тукуй рунакайми пайкунапак хайнита чарин, тукуй илактакунапими пайпак кикин kapakkayta Uurídico) riksishka hayñita charin.
7 ники
Камачипак наупакпика тукукунами пактапакта канчик, рунака камачик мана чиканьячишка пактапакта камашка хайнитами чарин. Тукуйкунами ТУКУЙ РУНАКУНАПАК ХАЙШИТА пипаш сарушпа рунакуната пиньякукпи, милликукпика синчита. шаяришпами харкана хайнита чарин.Тукусами saruykachaytapash harkanami kan.
8 ники
Тукуй рунакунами кимса капаккамачикпак (трибунал) ñawpakpi, ima лиакимантапаш пай иллута нишпа пактачина хайнита чарин; PayPak mclrYlakamathi arinishka, shuktak kamachikunapash arinishka tiksihayñita wakllichikukpika lIaktakunaka mana sakichún.
9 ники
Mana huchayuk runataka pipash mana yanka watankachu. Wanachina Amsa укупи мана пипаш чуранкачу, пайпак аллпамантапаш мана суркункачу.
10 ники
Тукуй рунами пай римашката кимса капьяк камачикпак навпакпи, тукуй runakunapak ñawpakpi, shuktak runakuna shinallatak paktapakta uyachina хайнита чарин. Paytak mana kimirishka kishpichik kamachik, ‘hayñikunata, канакайта (обязательный) рикушпа шуккутин има кактапаш ничун. Хуча тиякпи wanachikanawasiman kachachun ,. кутин мана хуча тиякпика кишпичичун.
11 ники
1.Тукуй хучачишка рунакунами, хуча мана иллу какпика Иуллапи Иукшина хайнита чарин. Huchachishkata lIullapi IIukshinkap, akka: kamachikkuna imata нишкаван, тантаришка, рунакуна. Ямата нишкаван, тарипайпи имата нишкаванми инчита шаяришпа кишпирина кан.
2. Мамаллактапак хайни навпакпи, лиактапура хайни навпакпи, Иакита рурашка мана анча хуча какпика мана пи супайчашка (конденадо) канкачу. Llakita aparikuy pachapi wanachishkata yalli IIashak wanaytapash mana чуранкачу
12 ники
Mana pi kinkinpak kawsaypi, wasipi, ayllupi yanka yaykurinata charinchu.Кикин. алли шутитапаш мана янка каминачу кан, кайман качашка уиллайтапаш мана пасканачу кан. Тукуй рунами камачиван киллпаришпа, кикин Кавсайман мана пипаш сатиричун харкана хайнита чарин.
13 ники
1. Тукуй рунами пайпак лиактапика кишпиришка пурината, майпи кавсана куската аклана хайнита чарин.
2. Тукуй рунами майхан Иактаманта, пайпак лиактамантапаш Иукширина хайнита чарин.Кутин пайпак lIaktaman tikrana hayñitapash charin.
14 ники
1. Катикачакпика, тукуй рунами митикушпа пакакукуна куската машкана хайнита чарин, чай хайшиванми май лиактапипаш алли кавсана куската чарината ушан.
2. Kay hayñika huchayuk pakakukushka lIaktapak kamachikunawanpash mana takarikchu kan. Шинапаш кай хайника: анча ‘хучата чарик рунатака мана янапанкачукан, шиллатак тинкиришка лиактакуна камачишката саруктака мана янапанкачу.
15 ники
1. Tukuy runamishuktak lIaktaman Ilaktayay (nacionalidad) hayñita chárin
2. Llaktayay hayñitaka mana kichunkachu, shuktak. Илактаман рантинчирина lIaktayay hayñitapash mana kichunkachu.
16 ники
1. Кариварми пайпаккунапак митата пактачишпака: туллпута мана рикушпалла, ista kashkata mana rikushpalla, ima iñikta mana rikushpalla sawarina hayñitami чарин.Шина яямама тукушпа, шук айллута валлпашпа, кариварми пактапакта саваришка кавсай ватакама сумактами кавсанка. Саваришкаманта паскаришпапаш аллита кавсайна хайнитами чарин.
2. Кариварми пайкуна кишпиришка юяйван мунанакушпаллами саваринка.
3. Ллактакунапак тикси нипака айллуми кан, чаймантами пайкунака айллуллактапаш, мамаллактапаш камашка канка.
17 ники
1.Тукуй рунамимайпи кавсана кикин аллпата, кикин васита, нипакунатапаш чарина хайнита чарин. Шиналлатак тукуйпак тиячун хайнитапашмичарин
2. Пипаш пайкунапак аллпата, васита, иматапаш мана кичункаллачукан.
18 ники
Tukuy runami kishpirishka yuyayta, shunkuyuyayta (conciencia), iñiyna hayñita чарин. Шуктак иньинаман яллината, пай мунашка пачакамакта катина хайнитапаш чаринми.Шиналлатак шуклла, тантаришпапаш шук инийта катина хайшитами чарин. Tukuykunapak ñawpakpi payllapash shuk iñiyta rikuchina хайшитами чарин.
19 ники
Тукуй рунами иматапаш уиллана, римана хайнита чарин, кайтака мана пипаш катираяшпа харканата ушанчу. Тарипайта, уиллайта, алли юйяйта часкинатапаш ушанми. Pay wiñachishka sumak yuyaykunataka: ankimanta, karurikuchikmanta (televisión), shuktak ñanmantapash mana saywarishpalla воланатами чарин.
20 ники
1. Тукуй рунами тантанакуна кишпита, касиклла тантанакуйта виньячина качаришка хайнита чарин.
2. Мана пипаш шук тантанакуйман мунай, мана мунай пушашка канкачу.
21 ники
1. Тукуй рунами пайпак илактапи камачик тукуна хайнита чарин. Payllatak sapalla, мана кашпака акллашка кашпапаш камачик тукуна хайнита чарин
2.Тукуй рунами пайпак лиактапика, шуктак рунакуна шиналлатак илакталланкайпи (funciones públicas) paktapakta Ilankana hayñita charin
3. LLaktakunapak munaymi tukuy runakunapak tiksi kamachi ushay kan, kaytakakikin ватанта тукуй лиактакунапи камачикуната пактапакта акллайпими рикучина кан. Кайтака пакалла, пипаш мана юячишка кикинллатакми шутита кушпа шината кан. Шиналлатак нишаник шуктак сами акллайкунапаш кишпиришками кан.
22 ники
Llaktapak ayllu kashkamantaka, tukuy runakunami kamashka kaws, ana hayñita чарин.Аллита кавсанкапака пайллатакми ньякарина кан, пайпак мамаллактапаш, кай айллутака шуктак лиактакунапаш янапанатами чарин. Paypak Ilaktapi тияшка кулкиван, нипакунаван янапаришпа сумакта кавсана хайнитами чарин. Качаришка кавсайта чаришпа, пай мунашка виньярина хайнитапашми чарин.
23 ники
1. Тукуй рунами ликанкана, Иланкайта акллана кишпиришкахайнита чарин. Кикин мунашка пактапакта Иланкайтами чари.на кан.Лланкайманта мана шиташка kankapakka, paypak Ilankaytaka payllatak kamarayanami kan.
2. Тукуй рунами мана акларишкакана, пайпак Иланкашакамантапаш пактапакта куллкитака часкина хайнитами чарин.
3. Тукуй Иланкак рунами пай лианкашкамантака мунашка пактапакта кулкита хапината чарин. Шина пайпак айллуман алли кавсайта кучун, пайпаш алли кавсайта чаричун. Кей иллакпика майхансами камайванпаш пактачишками канка.
4. Тукуй рунами тантанакуйта виньячина хайния чарин, чай тантанакуйка пайкунапак чаришкаталла каманкапакка мана канчу.
24 ники
Тукуй рунами самарина хайнита чарин ~ качаришка самайпачата амикта кушиярина хайнитапаш чаринми. Тавка ватакама, шайкункакама ликанкана кускатами чарин, самаришкамантапаш кулкита хапинами кан.
25 ники
1.Тукуй рунами пайта камак, алли кавсайта кук патапи кан хайнита чарин. Шиналлатак пайпак айллута, алликаусайта, алликайта, алли микуйта, алли чурарината, alli wasita, alli hampirinata, mitacoita (servicio) charina hayñita charin. Шиналлатак мана Иланкайта чаришпа, ункушка кашпа, вакллиришка кашпа, сапалла кашпа, паяяшпа, шуктак лиакикуната чаришпапаш янапачун хайнита чаринми.
2. Чичу варлипаш, Илуллу вавакунапаш алли кавсайта чарина, аллинта камашка кана хайшитами чарин.Тукуй кариварми wawakuna саваришкаяямама ~ вачашка кашпа, куйца вачашка сапалла варми вачашка кашпапаш пактапакта качаришка хайшитами чарин.
26 ники
1. Тукуй рунами ячана хайнита чарин. Тикси ячай, шуктак тикси ячаймантапаш мана кулкита куна канчу. Тикси ячайка тукуйкунапак йачанатакми кан, ячанамантака мана ‘пипаш сакириначу. Рурайячай, сумакьячайпаш хатуняшпа тукуй Илактаманми чайанка.Хатун ячайкунаман яйкунака тукуйпак пактами канка, синами пайкуна часкина кашката пактачинка.
2. Ячайка рунакуна юйайпи май алли виньяринатами янапанка, рунакунапак hayñipi iñiyta, tiksi kishpirinatami sinchiyachinka. L1aktapura, runakawsaypura, иникпура хамутайта, хикуллайта (толеранча) машиярина синчиячунми янапанка. Тинкиришка мамаллактакуна касиклла кавсайта чарираячунми уиллашпа рунакуман ячачинка.
3.Тайтамамака имасами ячайта чурикунаман кункапакка аклана хайнитами чарин.
27 ники
1. Тукуй рунами кишпришка юяйван айллуллактаван кимиришка кавсана хайнита чарин, макирурайкунаван тарипайкуна амавтарий лянкайпипаш чайпими kanata chaTin. Плати лианкашкамантапаш ималлатапаш хапинатами чарин.
2. Тукуй рунами пайпак алли шутита, амавта лианкайманта рикуришка нипакуната камана хайнита чарин.Плати киллкашка аравикуната лианкашка макирурайтапаш камана хайшитами чарин.
28 ники
Тукуй рунами тукуй пайпак лиактапи кавсак рунакуна, исталлактапи кавсак runakunapash nikishka kawsayta charichun yanapana hayñita charin. Шина Кей hayñi, kishpiriypash tinkirishka lIaktakuna willashka hayñikuna tukuy Ilaktaman пактачун.
29 ники
1. Тукуй рунами айллукунаман канакайта (дебер) айллуллактаман куната.чарин. Paypak ayllullaktapillami kishpiriy hunta kawsayta, kikinkayta charishpa may аллита виньяринка.
2. Пайпак хайнита, кишпирийта хапишпака камачикуна нишкапилла ватаришпами сайваришка канка. Пайка, кикин хайнита, кишпийта, инина юйайта; аллирунакайта, сумайчайта (респето), тукуйпак юяйта пактачина райкуми сайваришка камачи канка. Кипака: айллукуна, лиактакуна сумаклла тиячун, мана машикуната кичушпа, камишпа, миллишпа кавсачун юяшпами камачи нишката пактачинка.
3. Tinkirishka Ilaktakuna yuyarishkata tiksi hayñiwan, kishpiriywan, nimamantapash такаришпа lIakichina yuyaytaka mana charinachu. Тукуйкунами машияришпа кишпиринакункапак Иланкана кан.
30 ники
Кай тинкиришка лиактакуна виллашка хайникуната, кишпирийкунатака, шуклла рунаманпаш, тантанакуйманпаш янкака, мана пантата уилланаллачу. Runakunapak hayñita, kishpiriy yuyayta pichana yuyaytaka na charinachu.
Сина Иноуэ Кан — Сина Иноуэ Кан
Shina Inoue como estudiante, de una publicación de 1921.Shina Inoue Kan (японские языки: 菅 支那, Kan Shina , 25 июля 1899 г. — 7 октября 1982 г.), también visto como Shina Inouye , Shina Kan y un Shinako, era profesor Universitario japonés.
Vida temprana
Сина Иноуэ насьо эль 25 июля 1899 года в префектуре Хьего, Япония.В 1921 году, в 1921 году, Хидеко Иноуэ принял участие в конференции по ограничению вооружений в Вашингтоне, округ Колумбия, в представлении движущихся людей в Японии, с Ядзима Кадзико и с опытом растений Мариана Ирвина Остерхаута. В 1931 году Hide Inoue se convirtió en la Primera Mujer Presidenta de la Universidad de Mujeres de Japón.
Шина Иноуэ закончил Университет Японии в 1921 году и прошел в Эскуэла Пунаху на Гавайях с миром друзей Бека. Obtuvo un Ph.D. de la Universidad de Yale en 1927, con una tesis de filosofía titulada «Leibniz y Fichte sobre la naturaleza de la voluntad». Después de la Segunda Guerra Mundial, Complete más cursos sobre bienestar social en la Universidad de Columbia y el Seminario Teológico Union.
Каррера
Shina Inoue Kan siguió a su madre al mundo académico y al trabajo por la paz. Fue profesora en la Universidad de Mujeres de Japan a partir de 1928 y miembro de la junta ejecutiva de la Asociación de Mujeres de Paz de Japan.También estuvo activa a nivel nacional en la YWCA en Japón de 1933-1939, yen el Yale Club de Tokio.
Informó sobre los avances en los derechos de las mujeres japonesas en 1950 para el Instituto de Relaciones del Pacífico, y señaló con aliento las tasas de Participación femenina, tanto como votantes como кандидата, en las primeras elecciones después el estable de la estable de la estable una Oficina de la Mujer en el Ministerio. del Trabajo, entre otros avances. «Así, en muchos campos, las mujeres de Japón se están liberando gradalmente de las discapacidades heredadas del pasado feudal», заключение, «y se esfuerzan por alcanzar una posición de igualdad en la vida política, social económica».
Шина Кан представляет японскую ассоциацию университетов мира в 1949 году в Маниле в 1955 году в Маниле и в 1955 году в Маниле. y miembro de la junta ejecutiva de la Asociación Internacional de Escuelas de Trabajo Social. Fue Vicepresidenta de la sección japonesa de la Liga Internacional de Mujeres por la Paz y la Libertad de 1957-1961, y Presidenta de la liga en 1963.Kan se retiró de la Universidad en 1968.
Vida Personal
Antes de 1927, Shina Inoue se casó con el teólogo cristiano, профессор и переводчик Уильям Энкичи Кан (1895–1972). Мурио эль 7 октября 1982 года.
Ссылка
Использование рекомбинантных неструктурных белков 3A, 3B и 3AB вируса ящура в непрямом ИФА для дифференциации вакцинированного и инфицированного крупного рогатого скота
Sung W.H.T. 2002. В: Ящур: Стратегии контроля: Учеб. Int. Symp. Lyons, стр. 97–105.
Дональдсон А.И., Александерсен С. 2002. In: FMD: Control Strategies: Proc. Int. Symp. Lyons, стр. 173–181.
Щербаков А.В., Андреев В.Г., Дрыгин В.В., Гусев А.А. 2002. Молекулярная эпизоотология ящура в России и странах СНГ. Аграмая Россия . 2 , 8–11.
Google Scholar
Валарчер Дж.Ф., Ноулз Н.Дж., Феррис Н.П., Патон Д.Дж. 2005. Недавнее распространение вируса ящура серотипа Asia 1. Vet. Рек. 2 , 30.
Google Scholar
Клавихо А., Райт П., Китчинг П. 2004. Развитие диагностических методов для дифференциации инфекции от вакцинации при ящуре. Вет. J. 167 , 9–22.
Артикул CAS PubMed Google Scholar
Bergmann IE, Malirat V., Neitzert E., Beck E., Panizzutti N., Sanchez C., Falczuk A. 2000. Совершенствование серодиагностической стратегии для эпиднадзора за вирусом ящура у крупного рогатого скота при систематической вакцинации: комбинированная система непрямого ELISA-3ABC с иммуноэлектропереносным иммуноферментным блот-анализом. Arch. Virol. 145 , 473–489.
Артикул CAS PubMed Google Scholar
Clavijo A., Zhou E.M., Hole K. 2004. Разработка и использование биотинилированного рекомбинантного белка 3ABC в твердофазном конкурентном ИФА для обнаружения антител против вируса ящура. J. Virol. Meth. 120 , 217–227.
CAS Google Scholar
De Diego M., Brocchi E., Mackay D., De Simone F. 1997. Неструктурный полипротеин 3ABC вируса ящура в качестве диагностического антигена в ELISA для дифференциации инфицированных от вакцинированных. крупный рогатый скот. Arch. Virol. 142 , 2021–2033.
PubMed Google Scholar
Mackay DKJ, Forsyth MA, Davies PR, Berlinzani A., Belsham GJ, Flint M., Ryan MD 1998. Дифференциация инфекции от вакцинации при ящуре с использованием панели рекомбинантных, неструктурных белки в ELISA. Вакцина. 16 , 446–459.
Артикул CAS PubMed Google Scholar
Родригес А., Допазо Дж., Саиз Дж. К., Саиз Дж. К., Собрино Ф. 1994. Иммуногенность неструктурных белков вируса ящура: различия между инфицированными и вакцинированными свиньями. Arch. Virol. 136 , 123–131.
CAS PubMed Google Scholar
Marquardt O. 1996. In: Report of the Third Annual Meeting . Тюбинген, стр.19–20.
Сунь Т., Лу П., Wang X. 2004. Локализация эпитопов, связанных с инфекцией, на неструктурном белке 3ABC вируса ящура и применение тандемных эпитопов. J. Virol. Meth. 119 , 79–86.
CAS Google Scholar
Грибанов О.Г., Щербаков А.В., Перевозчикова Н.А., Гусев А.А. 1996. Применение фильтров аэросила А-300 и GF / F (GF / N) для очистки фрагментов ДНК, плазмидной ДНК и РНК. Биохимия. 61 , 1064–1070.
CAS Google Scholar
Маниатис Т., Фрич Э.Ф., Сэмбрук Дж. 1982. Молекулярное клонирование: лабораторное руководство . Колд-Спринг-Харбор, Нью-Йорк: Лаборатория Колд-Спринг-Харбор. Нажмите.
Google Scholar
Теория и практика иммуноферментного анализа (ИФА: теория и практика).Ред. Егоров А.М., Осипов А.П., Дзантиев Д.Д., Гаврилова Е.М.М .: Высшая школа.
Якобсон Р. Х. 1998. Валидация серологических тестов для диагностики инфекционных заболеваний. Rev. S. Techn. (МЭБ) . 17 , 469–526.
CAS Google Scholar