


что это такое и где находится, устройство и принцип работы, установка и подключение к сигнализации своими руками с фото и видео
20.08.20222 244 7 3 Система безопасности
Автор:Иван Баранов
CAN шина представляет собой интерфейс, использующийся для более упрощенного управления транспортным средством. Это обеспечивается благодаря обмену данными между разными системами, передача информации производится в зашифрованном виде.
Содержание
- 1 Где находится CAN-шина?
- 2 Технические характеристики
- 3 Назначение и функции кан-шины
- 4 Устройство и принцип работы
- 5 Преимущества и недостатки
- 6 Разновидности и маркировка
- 7 Подключение сигнализации своими руками
- 7.1 Необходимые приборы и инструменты
- 7.2 Пошаговая инструкция
- 8 Работа с терминалом
- 8.1 Варианты настройки
- 9 Режимы работы
- 10 Настройка мониторингового ПО
- 11 Скачать бесплатно инструкцию по установке и пользованию в формате PDF
- 12 Можно ли сделать анализатор своими руками?
- 12.
 1 Фотогалерея
1 Фотогалерея
- 12.
- 13 Сколько стоит?
- 14 Видео «Работа с CAN-шиной»
[ Раскрыть]
[ Скрыть]
Где находится CAN-шина?
Модуль CAN в машине являет собой сеть датчиков и контроллеров, которые предназначены для объединения всех управляющих устройств в одну систему.
Эта автомобильная технология используется как колодка, с которой можно соединять следующие управляющие блоки:
- «сигналки» — к противоугонной системе может подключаться модуль автоматического запуска двигателя;
- антиблокировочной системы «АБС»;
- механизмов безопасности, в частности, подушек и их датчиков;
- системы управления силовым агрегатом автомобиля;
- приборной комбинации;
- системы круиз-контроля;
- кондиционера и отопительного узла;
- системы управления автоматической трансмиссией и т. д.
CAN-модуль — это устройство, место монтажа которого может отличаться производителем транспортного средства.
Если неизвестно, где расположен интерфейс, этот момент уточняется в сервисной документации к авто, он обычно устанавливается:
- под капотом автомобиля;
- в салоне транспортного средства;
- под контрольной комбинацией.
Технические характеристики
Описание основных свойств системы диагностики и анализа CAN:
- общая скорость технологии при передаче пакетных данных варьируется в районе 1 мб/с;
- если информация передается между блоками управления, то скорость отправки составит около 500 кб/с;
- при функционировании устройства в режиме «Комфорт» передача данных осуществляется при 100 кб/с.
Назначение и функции кан-шины
Если правильно устанавливать и выполнять подсоединение проводов к интерфейсу, то можно обеспечить следующие опции:
- уменьшение параметра воздействия внешних помех на функционирование основных и дополнительных механизмов и узлов;
- возможность выполнить соединение и настраивать любые электронные приборы, в том числе охранные комплексы;
- простой принцип подключения и функционирования дополнительных электронных устройств и приборов, которые имеются в авто;
- более быстрая процедура передачи информации на определенное оборудование и механизмы авто;
- возможность отправки и получения цифровых данных одновременно, а также анализ информации;
- оперативная настройка и подключение опции дистанционного пуска ДВС.

Подробнее о назначении и общих характеристиках CAN-модуля рассказал канал «Crossover 159».
Устройство и принцип работы
По конструкции данный интерфейс выполнен в виде модуля в пластмассовом корпусе или колодки для подсоединения проводников. Цифровая шина включает в себя несколько кабелей CAN. Подключение этого устройства к бортовой сети осуществляется посредством одного проводника.
Шина работает по принципу отправки данных в закодированном виде. Каждое передающееся сообщение обладает специальным уникальным идентификаторов. Может быть информация: «скорость передвижения авто составляет 50 км/ч», «температура охлаждающей жидкости 90 градусов Цельсия» и т. д. При отправке сообщений все электронные блоки получают данные, проверяющиеся идентификаторами. Если информация имеет отношение к определенному модулю, то она обрабатывается, если нет — то игнорируется.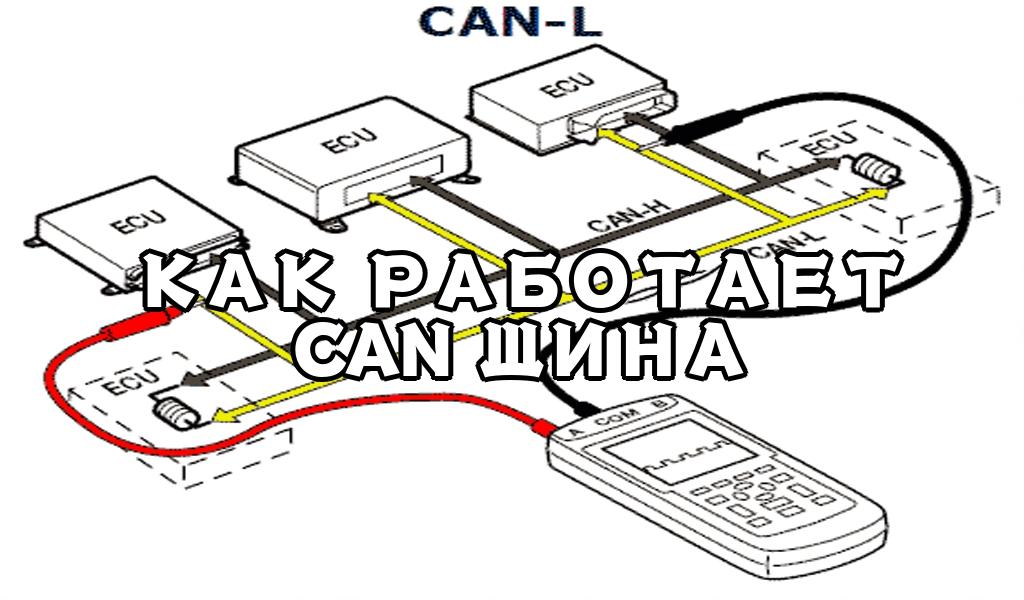
В зависимости от модели, длина идентификатора интерфейса может быть 11 или 29 бит.
Каждое устройство производит считывание информации, передающейся в шину. Передатчик, обладающий более низким приоритетом, должен отпустить шину, так как доминантный уровень искажает его передачу. Если приоритет передающихся пакетов будет более высоким, то он не трогается. Устройство, которое при отправке сообщений потеряло связь, через определенный временной интервал восстановит ее автоматически.
Работа CAN-шины возможна в нескольких режимах:
- Автономный, фоновый или спящий. При включении данного режима все основные агрегаты и узлы выключены и двигатель не заведен. На шину все равно подается напряжение от бортовой сети. Его значение небольшое, что дает возможность не допустить разряда АКБ.
- Пробуждение или запуск интерфейса. В данном режиме устройство начинает работу, это происходит при включении системы зажигания. Если автомобиль оснащен клавише Старт/Стоп, то CAN-шина начинает работу при ее нажатии.
 Производится включение функции стабилизации напряжения, в результате чего питание начинает поступать на контроллеры и датчики.
Производится включение функции стабилизации напряжения, в результате чего питание начинает поступать на контроллеры и датчики. - Включение активного режима приводит к началу процесса обмена информацией между исполнительными механизмами и регуляторами. Величина напряжения в сети возрастает, так как шина может потреблять до 85 мА тока.
- Режим отключения или засыпания. При остановке двигателя автомобиля все агрегаты и механизмы, подключенные по CAN-интерфейсу, выключаются. Питание на них перестает подаваться.
Пользователь Valentin Belyaev подробно рассказал о принципе действия цифрового интерфейса.
Преимущества и недостатки
Если автомобиль оснащен цифровым интерфейсом, это обеспечивает следующие плюсы:
- Простота монтажа сигнализации на транспортное средство. Наличие CAN-шины в авто позволяет обеспечить более быстрый и упрощенный алгоритм подключения охранной системы.
- Высокая скорость отправки информации между агрегатами и системами, что обеспечивает быстродействие узлов.
- Хорошая устойчивость к воздействию помех.
- Все цифровые интерфейсы имеют многоуровневую систему контроля. Благодаря этому можно не допустить образования ошибок при отправке и приеме информации.
- Цифровой интерфейс, работая в активном режиме, выполняет разброс скорости по различным каналам самостоятельно. Благодаря этому все системы работают максимально оперативно.
- Безопасность CAN-шины. При попытке получения несанкционированного доступа к автомобилю система может произвести блокировку узлов и агрегатов.
Минусы:
- Некоторые системы обладают ограничениями по объему передающейся информации. Если автомобиль сравнительно новый и оборудован разными электронными устройствами, это приводит к росту нагрузки на канал передачи данных. В результате время отклика увеличивается.
- Большинство передающейся информации по цифровому интерфейсу имеет определенное назначение.
 На полезные данные в системе предусмотрена небольшая часть трафика.
На полезные данные в системе предусмотрена небольшая часть трафика. - Возможна проблема отсутствия стандартизации. Это часто происходит при применении протоколов высших уровней.
Разновидности и маркировка
По типу идентификаторов такие устройства делятся на два вида:
- CAN2, 0A. Это маркировка интерфейсов, которые могут работать в 11-битном формате передачи информации. Данная разновидность устройств не в состоянии определять ошибки импульсов от блоков, которые работают с 29 бит.
- CAN2, 0B. Это маркировка шин, работающих в формате 11 бит. Основная особенность заключается в возможности передачи информации на блоки управления при выявлении 29-битного идентификатора.
В зависимости от области применения, шины разделяются на три класса:
- Для двигателя транспортного средства. При подключении шины обеспечивается максимальная скорость передачи данных и связи между управляющими устройствами. Отправка информации осуществляется по дополнительному каналу.
 Основное назначение состоит в синхронизации работы микропроцессорного модуля с другими системами. К примеру, антиблокировочным узлом колес, трансмиссией и т. д.
Основное назначение состоит в синхронизации работы микропроцессорного модуля с другими системами. К примеру, антиблокировочным узлом колес, трансмиссией и т. д. - Цифровые интерфейсы класса Комфорт. Этот класс шин предназначен для взаимодействия с любыми устройствами данного типа. Интерфейс используется для работы с системами электронного изменения положения электрозеркал, узла обогрева кресел, управления люком и т. д.
- Информационно-командные устройства. Они характеризуются аналогичной скоростью при отправке данных. Такие шины обычно применяются для связи между системами, которые требуются для обслуживания автомобиля.
Канал «Diyordie» рассказал о назначении цифрового интерфейса, а также о его разновидностях в автомобиле.
Подключение сигнализации своими руками
Чтобы подключить охранный комплекс к цифровому интерфейсу, надо знать место установки микропроцессорного модуля управления сигнализаций. Это устройство устанавливается под приборной комбинацией машины. Возможен монтаж блока за вещевым ящиком или аудиосистемой.
Это устройство устанавливается под приборной комбинацией машины. Возможен монтаж блока за вещевым ящиком или аудиосистемой.
Необходимые приборы и инструменты
Предварительно надо подготовить:
- тестер для проверки напряжения — мультиметр;
- нож;
- изоленту;
- отвертку с крестовым наконечником.
Пошаговая инструкция
Установка выполняется так:
- Приступая к задаче, надо убедиться в работоспособности противоугонного комплекса. В случае, когда монтаж системы не был выполнен, надо подключить все устройства к блоку управления, а его — к аккумулятору.
- Производится поиск основного кабеля, который идет на цифровой интерфейс. Этот провод всегда толстый и обычно имеет оранжевую оболочку.
- Микропроцессорный модуль противоугонной системы надо подключить к этому проводнику. Для осуществления задачи применяется колодка цифровой шины.
- Если блок управления охранной системы не был установлен, производится его монтаж.
 Он должен быть размещен в скрытом месте, не подверженном воздействию влаги. При монтаже модуль надежно фиксируется с помощью пластиковых стяжек или саморезов.
Он должен быть размещен в скрытом месте, не подверженном воздействию влаги. При монтаже модуль надежно фиксируется с помощью пластиковых стяжек или саморезов. - Все места соединения проводов надо заизолировать с применением термоусадочных трубок либо изоленты. После подключения производится диагностика выполненных действий. Если возникли проблемы, надо воспользоваться мультиметром для поиска поврежденного участка.
- На последнем этапе необходимо произвести проверку и настройку всех каналов передачи данных. Если имеются дополнительные каналы, они также настраиваются.
Канал «Гаражный любитель» подробно рассказал об установке и подключении противоугонного комплекса Старлайн с CAN-шиной.
Работа с терминалом
Перед эксплуатацией надо учесть рекомендации по использованию, которые указываются в сервисном руководстве. Предварительно производится настройка устройства.
Предварительно производится настройка устройства.
Варианты настройки
Если используется терминал, есть два варианта настроить работу интерфейса:
- С помощью специальной программы «Конфигуратор» для компьютера. При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
- Используя команды «CanRegime». Обычно этот вариант применяется для дистанционной настройки с использованием СМС-сообщений. Могут применяться команды, которые отправляются из программного обеспечения для мониторинга.
Подробнее о командах, которые указываются после CanRegime:
- Mode — определяет режим функционирования. Если показана цифра 0 — то цифровой интерфейс отключен, если 1 — используется стандартный фильтр. Цифры 2 и 3 указывают на принадлежность пакетов к 29- либо 11-битному классу.
- BaudRate. Команда предназначена для определения скорости работы цифрового интерфейса. Важно, чтобы этот параметр соответствовал скорости передачи информации в авто.

- TimeOut — определяет время ожидания для каждого сообщения. Если полученная величина слишком низкая, то цифровой интерфейс сможет отловить не все передающиеся сообщения.
Режимы работы
Существует несколько режимов функционирования терминала:
- FMS — в нем автовладелец может узнать общий расход горючего, обороты, пробег транспортного средства, нагрузку на оси, температуру силового агрегата. Допускается получение данные об объеме горючего в баке. Для работы в данном режиме выполняется вход в меню выбора типа фильтров программы «Конфигуратор». Указывается тип режима FMS, скорость цифрового интерфейса, после чего нажимается кнопка «Применить».
- Режим прослушки используется для получения сообщений, передающий через цифровой интерфейс. Чтобы работать с ним, надо зайти в программе в настройки шины CAN и выбрать один из рабочих параметров. Это может быть скорость интерфейса или время ожидания, тип фильтра в данном случае не играет роли. После указания параметров «кликается» клавиша «Прослушать».
- Для привязки информации, полученной посредством прослушивания цифрового интерфейса, используются пользовательские фильтры. После прослушки данных надо выбрать тип фильтрующей технологии (для 11 или 29 бит). Расшифровка данных производится в соответствии с технической документацией.
- Режим тестирования OBD2 используется для сканирования скорости отправки информации, а также класса идентификатора. Чтобы запустить эту функцию, автовладельцу надо подключиться напрямую к цифровому интерфейсу или диагностическому разъему. Включение режима осуществляется посредством входа в меню «Настройка» и выбора опции «Тест OBD2». В результате терминалом начнется отправка запросов с конкретными идентификаторами на различных скоростях интерфейса. Во вкладке «Устройство» можно ознакомиться с извлеченной и расшифрованной информацией.
Настройка мониторингового ПО
После успешного подключения терминала надо произвести диагностику правильности отправки информации. Эти данные передаются на сервер мониторинга.
Скачать бесплатно инструкцию по установке и пользованию в формате PDF
Загрузить сервисное руководство по монтажу и эксплуатации по ссылкам в таблице.
| Руководства по эксплуатации и установке сигнализации на русском языке |
| CAN-шина Galileosky |
| CAN-шина Galileosky |
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth.
 Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
Благодаря этому автовладелец может сохранять важную информацию в память смартфона. - Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка.
 Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.
Общая схема для сборки анализаторного устройства Плата, использующаяся в качестве основыСколько стоит?
Примерные цены на покупку КАН-устройств приведены в таблице.
| Наименование | Цена, руб |
| CAN-шина | 2000-5000 |
| Цена актуальная для трех регионов: Москва, Челябинск, Краснодар. | |
Видео «Работа с CAN-шиной»
Канал «CAN-Hacker Automotive Data Bus Sollutions» показал способ работы с цифровым интерфейсом на примере автомобиля Рено Каптюр.
Была ли эта статья полезна?
Спасибо за Ваше мнение!
Статья была полезнаПожалуйста, поделитесь информацией с друзьями
Да (75. 00%)
00%)
Нет (25.00%)
Can шина принцип работы
Что такое CAN-шина
CAN-шина не имеет никакого отношения к автомобильным покрышкам. Дело в том, что в электронике «шиной» называют систему, по которой передаются данные. Это своего рода река с ручейками, если говорить проще. Что касается аббревиатуры, расшифровывающейся как Controller Area Network (сеть контроллеров), то за ней стоит стандарт промышленной сети для объединения в единую сеть различных исполнительных устройств и датчиков.
- Что такое CAN-шина
- Принцип работы CAN-шины
- Виды CAN-шин
- Как передается информация
- Схемы CAN-шины
- Видео «Диагностика авто с помощью CAN шины»
- Разновидности функций шин
- Типы сообщений
- Функциональность системы
- Разрешение конфликтов на шине
- Физические составляющие
- Скорость передачи данных CAN-шины
- Источники:
Принцип работы CAN-шины
CAN-шина, будучи системой цифровой связи и управления электронными устройствами, позволяет осуществлять обмен информацией между блоками управления.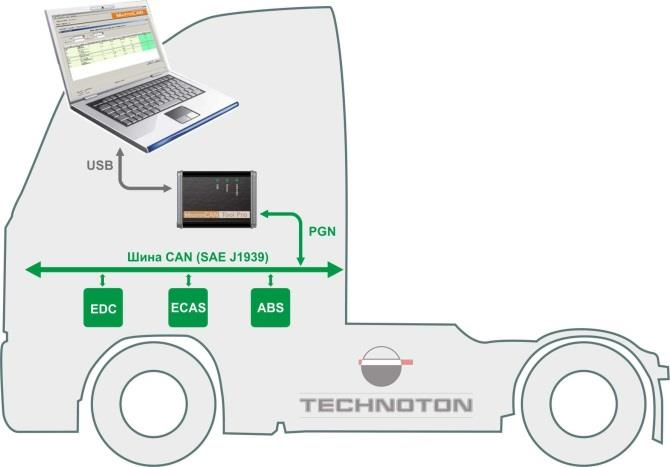 Сеть имеет три основных режима работы – активный при включенном зажигании, спящий при выключенном зажигании и, наконец, режим пробуждения и засыпания, когда зажигание включают и выключают.
Сеть имеет три основных режима работы – активный при включенном зажигании, спящий при выключенном зажигании и, наконец, режим пробуждения и засыпания, когда зажигание включают и выключают.
CAN-шина выполняет ряд задач, среди которых ускорение передачи сигналов к разным системам, механизмам и устройствам, уменьшение количества проводов, упрощение подсоединения и работы дополнительных устройств.
Виды CAN-шин
Существует три основных вида.
Силовые обеспечивают синхронизацию и обмен данными между ЭБУ двигателя и основными агрегатами и системами автомобиля – коробкой передач, зажиганием и другими. «Комфортные» нужны, соответственно, для работы опций комфорта. Например, климатической системы, электропривода зеркал и обогрева сидений.
Информационно-командные введены для обмена данными между ЭБУ и такими вспомогательными информационными комплексами как навигационная система.
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.
Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Рис. 3. Блок-схема межсетевого интерфейса
Схемы CAN-шины
Такая схема подключения устройств называется параллельной схемой подключения. Для достижения максимальной скорости волновые сопротивления блоков должны согласовываться.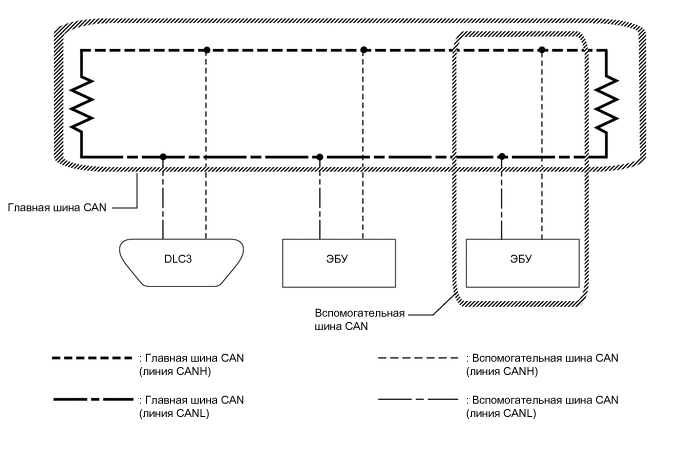 Если выходит из строя один из блоков (трансмиттеров), этот блок может «завалить» всю шину.
Если выходит из строя один из блоков (трансмиттеров), этот блок может «завалить» всю шину.
Все сообщения, которые передаются по шине, имеют определенный цифровой код.
Это позволяет производить компьютерную диагностику при помощи опроса блоков по шине.
Диагностическое устройство преобразует цифровые коды и сигнал в абсолютные значения либо коды ошибок.
В спящем режиме CAN-шина полностью не бездействует. Большинство автомобилей используют шину для организации сбора информации дла системы сигнализации и охраны, собирая информацию по шине о датчиках проникновения, контактных устройствах.
Видео «Диагностика авто с помощью CAN шины»
//www.youtube.com/embed/6awrwsCX24U?rel=0&controls=0&showinfo=0
Разновидности функций шин
Существуют разные типы представленного устройства.
- КАН-шина агрегата силового. Это быстрый канал, который передает послания со скоростью 500 кбит/с. Его главная задача заключается в коммуникации блоков управления, например трансмиссия-двигатель.
- Система «Комфорт» — более медлительный канал, передающий данные со скоростью 100 кбит/с. Он связывает все устройства системы «Комфорт».
- Информационно-командная программа шины также передает сигналы медленно (100 кбит/с). Ее основное предназначение — обеспечить связь между обслуживающими системами, например телефоном и навигацией.
Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
- Data Frame. Такой тип сообщений (фреймов) передает сигналы с определенным идентификатором.
- Error Frame представляет собой сообщение сбоя в процессе обмена. Он предлагает повторить действия сначала.
- Overload Frame. Послание появляется в момент необходимости перезапустить работу контроллера.
- Request Frame Remout Transmission обозначает запрос данных, где именно находится идентификатор.
I — CAN-шина;
II — резистор сопротивления;
III — интерфейс.
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Разрешение конфликтов на шине
Когда сигналы, поступающие на шину, приходят на несколько контроллеров, система выбирает, в какой очередности будет обработан каждый. Два или более устройства могут начать работу практически одновременно. Чтобы при этом не возник конфликт, производится мониторинг.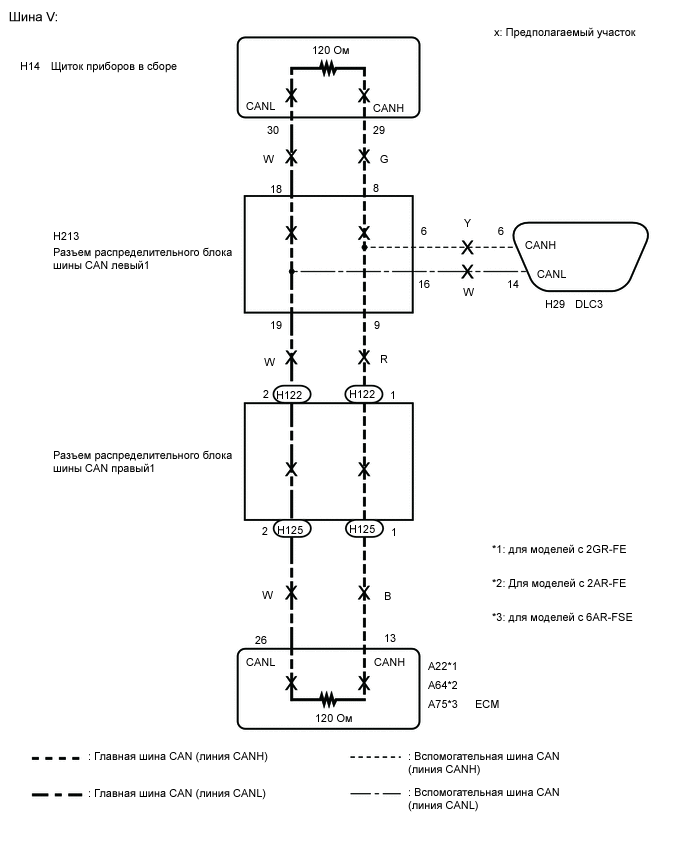 CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
Существует градация сообщений по приоритетной и рецессивной градации. Информация, имеющая самое низкое числительное выражение поля арбитража, выиграет при наступлении конфликтного положения на шине. Остальные передатчики постараются отослать свои фреймы позже, если ничего не изменится.
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
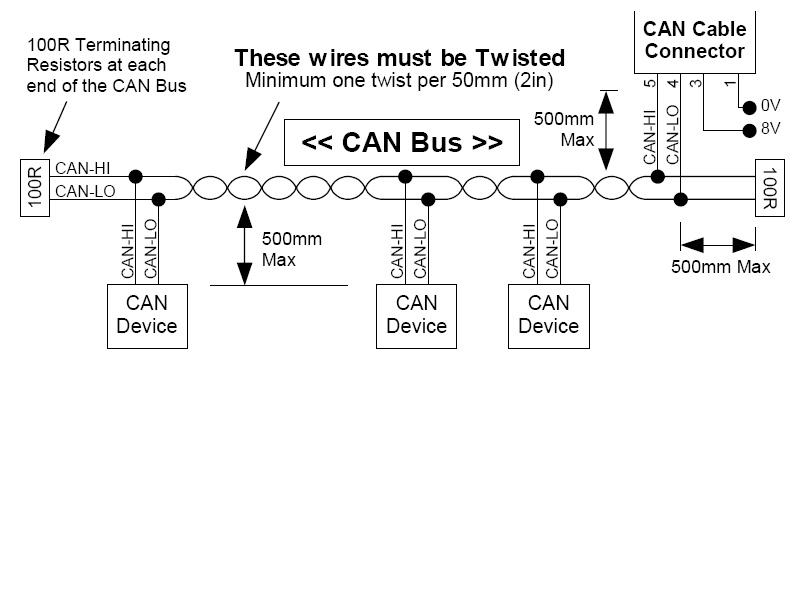
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным.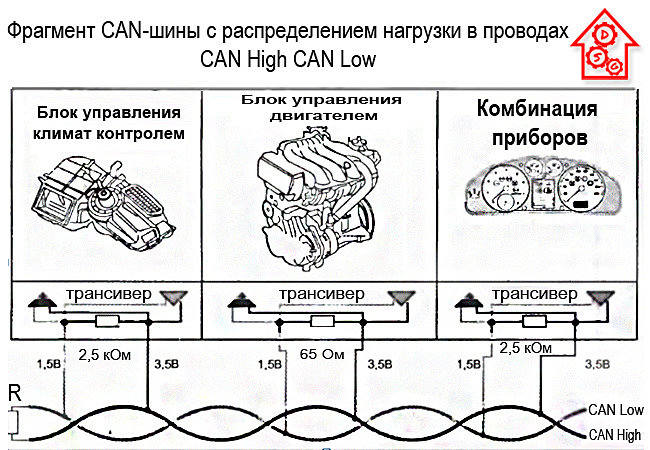 Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две цепи или более.
Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две цепи или более.
Источники:
- avtocity365.ru
- Авторамблер
- Drive2.ru
- Пикабу!
- autocentrum.ru
- studopedia.su
- SYL.ru
- DRIVE2
- elm327.club
Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 10 чел.
Средний рейтинг: 4.4 из 5.
CAN шина в автомобиле: что это такое, принцип работы, как подключить по ней сигнализацию и сделать анализатор своими руками (фото и видео)
CAN-шина — устройство, облегчающее управление машиной за счет обмена информацией с другими системами авто. Передача данных от одного автомобильного блока к другому осуществляется по специальным каналам с использованием шифрования.

Что такое CAN-шина
Устройство и где находится шина
Инструкция по подключению сигнализации по CAN-шине
Признаки и причины
Как сделать анализатор своими руками?
Плюсы и минусы CAN-шин
Видео «Ремонт CAN-интерфейса своими руками»
Комментарии и Отзывы
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии.
 Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики. - Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Виды CAN-шин
Условно CAN-шины можно разделить между собой на два типа в соответствии с использующимися идентификаторами:
- КАН2, 0А. Так маркируются цифровые устройства, которые могут функционировать в 11-битном формате обмена данными. Этот тип интерфейсов по определению не может выявить ошибки на сигналы от модулей, работающих с 29 бит.
- КАН2, 0В. Так маркируются цифровые интерфейсы, функционирующие в 11-битном формате. Но ключевая особенность состоит в том, что данные об ошибках будут передаваться на микропроцессорные устройства, если обнаруживается идентификатор на 29 бит.
CAN-шины могут делиться на три категории в соответствии с видом:
- Для силового агрегата автомобиля. Если подключить к нему такой тип интерфейса, это позволит обеспечить быструю связь между управляющими системами по дополнительному каналу. Предназначение шины заключается в синхронизации работы ЭБУ двигателя с другими узлами. Например, коробкой передач, антиблокировочной системой и т.
 д.
д. - Устройства типа Комфорт. Такая разновидность цифровых интерфейсов используется для соединения всех систем данной категории. К примеру, электронной регулировки зеркал, подогрева сидений и т. д.
- Информационно-командные интерфейсы. Имеют аналогичную скорость передачи информации. Используются для обеспечения качественной связи между узлами, необходимыми для обслуживания транспортного средства. К примеру, между электронным блоком управления и навигационной системой или смартфоном.
О принципе действия, а также о разновидностях цифровых интерфейсов рассказал канал «Электротехника и электроника для программистов».
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Что понадобится?
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине.
 Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
Он более толстый и его изоляция обычно окрашена в оранжевый цвет. - Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
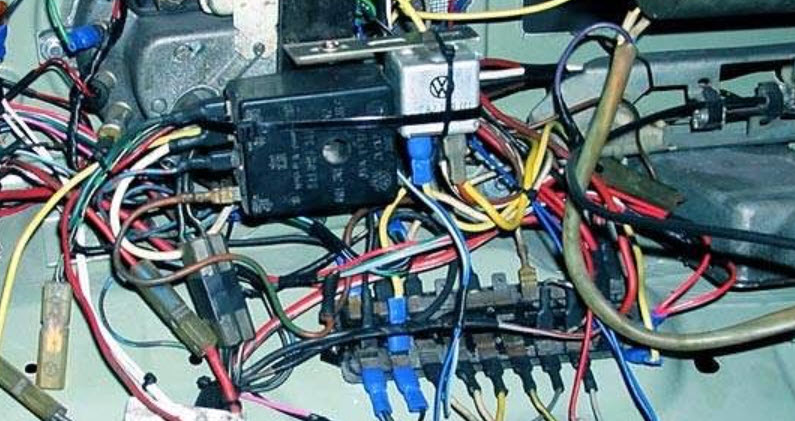
Неисправности
Поскольку CAN-интерфейс завязан со многими системами автомобиля, при поломке или некорректной работе одного из узлов в нем могут появиться неполадки. Их наличие отразится на функционировании основных агрегатов.
Признаки и причины
О появлении неисправностей могут сообщить такие «симптомы»:
- на приборной панели загорелись одновременно несколько значков без причины — подушки безопасности, рулевое управление, давление в системе смазки и т. д.;
- появился световой индикатор Check Engine;
- на контрольном щитке отсутствует информация о температуре силового агрегата, уровне топлива в баке, скорости т.
 д.
д.
Причины, по которым могут возникнуть неисправности в работе CAN-интерфейса:
- обрыв проводки в одной из систем или повреждение электролиний;
- короткое замыкание в работе агрегатов на батарею или землю;
- повреждение резиновых перемычек на разъеме;
- окисление контактов, в результате чего нарушается передача сигнала между системами;
- разряд АКБ автомобиля либо падение величины напряжения в электросети, что связано с неправильным функционированием генераторной установки;
- замыкание систем CAN-high либо CAN-low;
- появление неисправностей в работе катушки зажигания.
Подробнее о поломках цифрового интерфейса и тестировании с использованием компьютера рассказал канал «KV Avtoservis».
Диагностика
Чтобы определить причину появления неполадок, потребуется тестер, рекомендуется использование мультиметра.
- Диагностика начинается с поиска проводника витой пары КАН-шины. Кабель имеет черную либо оранжево-серую изоляцию.
 Первый является доминантным уровнем, а второй — второстепенным.
Первый является доминантным уровнем, а второй — второстепенным. - С помощью мультиметра производится проверка величины напряжения на контактных элементах. При выполнении задачи зажигание нужно включить. Процедура тестирования позволит выявить напряжение в диапазоне от 0 до 11 вольт. На практике это обычно 4,5 В.
- Выполняется отключение зажигания. От аккумулятора отсоединяется проводник с отрицательным контактом, предварительно гаечным ключом надо ослабить зажим.
- Выполняется измерение параметра сопротивления между проводниками. О замыкании контактов можно узнать, если эта величина стремится к нулю. Когда диагностика показала, что сопротивление бесконечно, то в электролинии имеется обрыв. Проблема может заключаться непосредственно в контакте. Требуется более детально проверить разъем и все провода.
- На практике замыкание обычно происходит из-за поломки управляющих устройств. Для поиска вышедшего из строя модуля следует поочередно отключить от питания каждый блок и выполнить проверку величины сопротивления.
Пользователь Филат Огородников рассказал о диагностике КАН-шины с использованием осциллографа.
Как сделать анализатор своими руками?
Самостоятельно выполнить сборку данного устройства сможет только профессионал в области электроники и электротехники.
Основные нюансы процедуры:
- В соответствии со схемой на первом фото в галерее надо приобрести все элементы для разработки анализатора. На ней подписаны составляющие детали. Потребуется плата с контроллером STM32F103С8Т6. Понадобится электросхема стабилизированного регуляторного устройства и КАН трансивер МСР2551.
- При необходимости в анализатор добавляется блютуз-модуль. Это позволит при эксплуатации девайса записать основную информацию на мобильное устройство.
- Процедура программирования выполняется с использованием любой утилиты. Рекомендуется применение программ КАНХакер или Ардуино. Первый вариант более функциональный и имеет опцию фильтрации пакетных данных.
- Для осуществления прошивки потребуется преобразовательное устройство USB-TTL, оно понадобится для отладки.
 Простой вариант — применение ST-Link второй версии.
Простой вариант — применение ST-Link второй версии. - Загрузив программу на компьютер, основной файл формата ЕХЕ необходимо прошить в контроллер с использованием программатора. После выполнения задачи ставится перемычка бутлоудера, а изготовленное устройство подключается к ПК через USB-выход.
- Заливать прошивку в анализатор можно с использованием программного обеспечения MPHIDFlash.
- Когда обновление ПО будет завершено, надо отсоединить провод и демонтировать перемычку. Производится установка драйверов. Если устройство собрано верно, то на компьютере оно будет определяться как COM-порт, это можно посмотреть в диспетчере задач.
Фотогалерея
Плюсы и минусы CAN-шин
Преимущества, которыми обладает цифровой интерфейс:
- Быстродействие. Устройство может оперативно обмениваться пакетными данными между разными системами.
- Высокая устойчивость к воздействию электромагнитных помех.
- Все цифровые интерфейсы имеют многоуровневую систему контроля.
 Благодаря этому можно не допустить появления ошибок при передаче информации и ее приеме.
Благодаря этому можно не допустить появления ошибок при передаче информации и ее приеме. - При работе шина сама раскидывает скорость по каналам в автоматическом режиме. Благодаря этому обеспечивается эффективная работа электронных систем транспортного средства.
- Цифровой интерфейс является безопасным. Если к электронным узлам и системам автомобиля кто-то попытается получить незаконный доступ, шина автоматически заблокирует эту попытку.
- Наличие цифрового интерфейса позволяет упрощенно произвести монтаж охранной системы на машину с минимальным вмешательством в штатную бортовую сеть.
Минусы, которыми обладает CAN-шина:
- Некоторые интерфейсы имеют ограничения по объему информации, которая может передаваться. Этот недостаток будет весомым для современного автомобиля, «напичканного» электроникой. При добавлении дополнительных устройств на шину возлагается более высокая нагрузка. Из-за этого снижается время отклика.
- Все пакетные данные, которые передаются по шине, имеют определенное назначение.
 Для полезной информации отводится минимальная часть трафика.
Для полезной информации отводится минимальная часть трафика. - Если применяется протокол повышенного уровня, это станет причиной отсутствия стандартизации.
Видео «Ремонт CAN-интерфейса своими руками»
Пользователь Roman Brock рассказал о процедуре восстановления шины приборной панели в автомобиле Форд Фокус 2 рестайлинг.
Введение
Беспилотный автомобиль StarLine на платформе Lexus RX 450h — научно-исследовательский проект, стартовавший в 2018 году. Проект открыт для амбициозных специалистов из Open Source Community. Мы предлагаем всем желающим поучаствовать в процессе разработки на уровне кода, опробовать свои алгоритмы на реальном автомобиле, оснащенном дорогостоящим оборудованием. Для управления автомобилем было решено использовать Apollo, открытый фреймворк. Для работы Apollo нам необходимо было подключить набор модулей. Эти модули помогают программе получать информацию об автомобиле и управлять им по заданным алгоритмам.
К таким модулям относятся:
- модуль позиционирования автомобиля в пространстве с помощью GPS-координат;
- модуль управления рулем, ускорением и торможением авто;
- модуль состояния систем автомобиля: скорость, ускорение, положение руля, нажатие на педали и т.
 д.;
д.; - модуль получения информации об окружении автомобиля. С этим справятся ультразвуковые датчики, камеры, радары и лидары.
Прежде всего перед нашей командой стояла задача научиться управлять рулем, ускорением и торможением автомобиля. А также получать информацию о состоянии систем автомобиля. Для этого была проведена большая работу по изучению CAN-шины Lexus.
Теоретическая часть
Что такое CAN-шина
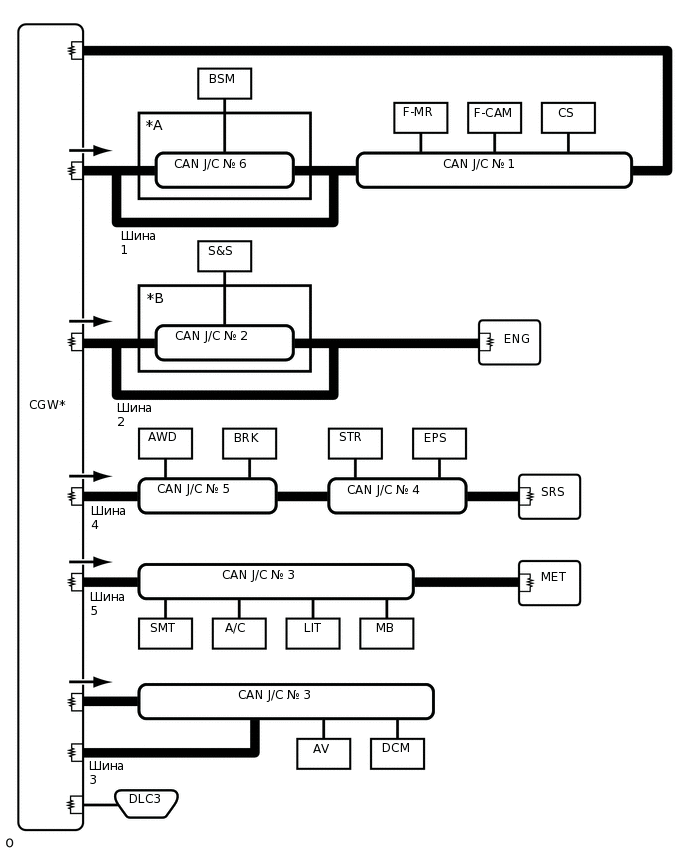
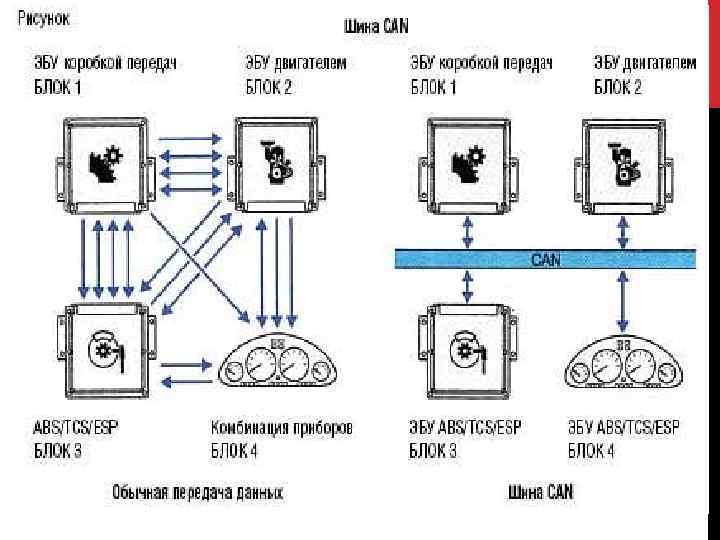
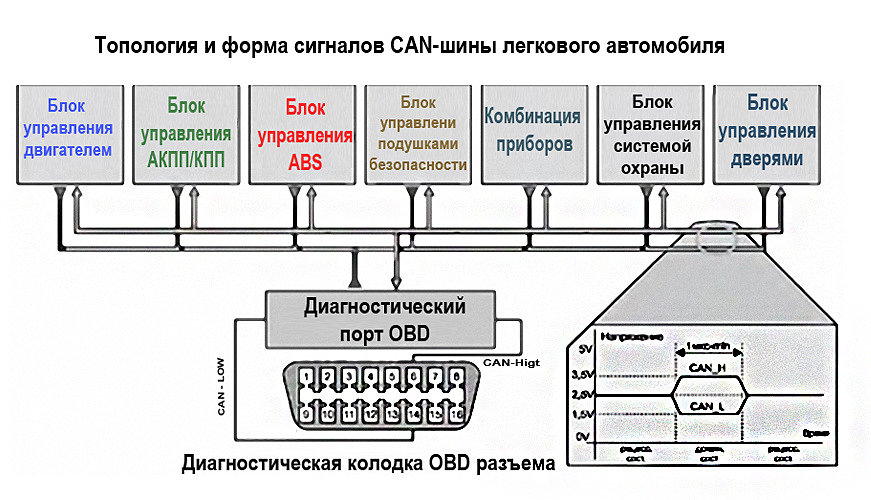
В современных автомобилях управление всеми системами взяли на себя электронные блоки (Рис. 1.). Электронные блоки — это специализированные компьютеры, каждый из которых имеет все необходимые интерфейсы для интеграции с автомобилем. С помощью цифровых интерфейсов связи, блоки объединяются в сеть для обмена информацией друг с другом. Самые распространенные цифровые интерфейсы в автомобилях — CAN, LIN, FLEXRay. Из них наибольшее распространение получил именно CAN.
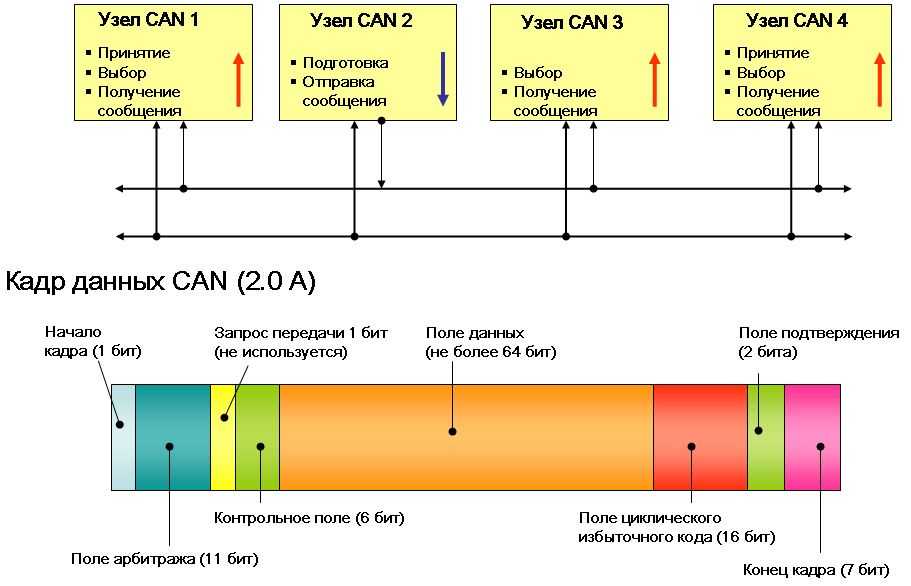
CAN (Controller Area Network) шина — это промышленный стандарт сети. В 1986 году этот стандарт разработали в компании Bosch. А первым автомобилем с CAN-шиной стал Mercedes-Benz W140, выпущенный в 1991 году. Стандарт разрабатывался для возможности устройствам общаться друг с другом без хоста. Обмен информацией осуществляется с помощью специальных сообщений, которые состоят из полей ID, длины сообщения и данных. Каждый блок имеет свой набор ID. При этом приоритет на шине имеет сообщение с меньшим ID. Поле данных может нести информацию, например, о состоянии систем и датчиков, команды управления механизмами и т.д.
А первым автомобилем с CAN-шиной стал Mercedes-Benz W140, выпущенный в 1991 году. Стандарт разрабатывался для возможности устройствам общаться друг с другом без хоста. Обмен информацией осуществляется с помощью специальных сообщений, которые состоят из полей ID, длины сообщения и данных. Каждый блок имеет свой набор ID. При этом приоритет на шине имеет сообщение с меньшим ID. Поле данных может нести информацию, например, о состоянии систем и датчиков, команды управления механизмами и т.д.
Рис. 1. Шина CAN автомобиля.
На физическом уровне шина представляет собой витую пару из медных проводников. Сигнал передается дифференциально, за счет чего достигается высокая помехоустойчивость.
Рис. 2. Физическое представление сигнала в CAN шине
Посредством CAN шины можно получать информацию о состоянии различных датчиков и системах автомобиля. Также по CAN можно управлять узлами автомобиля. Именно эти возможности мы и используем для своего проекта.
Мы выбрали Lexus RX, потому что знали, что сможем управлять всеми необходимыми узлами по CAN. Так как самое сложное при исследовании автомобиля — это закрытые протоколы. Поэтому одной из причин выбора именно этой модели авто стало наличие описания части протокола CAN-шины в opensource-проекте Openpilot.
Так как самое сложное при исследовании автомобиля — это закрытые протоколы. Поэтому одной из причин выбора именно этой модели авто стало наличие описания части протокола CAN-шины в opensource-проекте Openpilot.
Правильно управлять автомобилем — означает понимать, как работают механические части систем автомобиля. Нам было необходимо хорошо понимать, как правильно работать с электроусилителем или управлять замедлением автомобиля. Ведь, например, при повороте колеса создают сопротивление на рулевое управление, что вносит свои ограничения на управление при повороте. Некоторые системы невозможно использовать без ввода авто в специальные рабочие режимы. Эти и другие детали нам пришлось изучать в процессе работы.
Электроусилитель руля
Электроусилитель руля EPS (Electric Power Steering) — система, предназначенная снизить усилие на руль при повороте (Рис. 3). Приставка «электро» говорит о типе системы — электрическая. Управление рулем с этой системой становится комфортным, водитель поворачивает руль в нужном направлении, а электродвигатель помогает довернуть его до необходимого угла.
Электроусилитель устанавливается на рулевой вал автомобиля, части которого соединены между собой торсионным валом. На торсионный вал устанавливается датчик величины крутящего момента (Torque Sensor). При вращении руля происходит скручивание торсионного вала, которое регистрируется датчиком момента. Данные, полученные от датчика момента, датчиков скорости и оборотов коленвала, поступают в электронный блок управления ECU. А ECU, в свою очередь, уже вычисляет необходимое компенсационное усилие и подает команду на электродвигатель усилителя.
Рис. 3. Схематичное изображение системы электроусилителя руля
Видео: cистема LKA рулит автомобилем с помощью системы EPS.
Электронная педаль газа
Дроссельная заслонка — это механизм регулировки количества топливной смеси, которая попадет в двигатель. Чем больше смеси попадет, тем быстрее едет автомобиль.
Электронная педаль газа — это система, которая задействует работу нескольких электронных узлов. Сигнал о положении педали, при ее нажатии, поступает в блок управления двигателем ECM (Engine Control Module). ECM, на основе этого сигнала, рассчитывает необходимое количество топлива, которое нужно подать в двигатель. В зависимости от необходимого количества топлива, ECM регулирует угол открытия дроссельной заслонки.
Рис. 4. Система электронной педали газа.
Видео: Для работы круиз-контроля используется управление электронной педалью газа.
Электронные системы помощи водителю
Мы купили автомобиль, который оборудован множеством цифровых блоков и систем помощи водителю (ADAS). В нашем проекте мы используем LKA, ACC и PCS.
LKA (Lane Keep Assist) — это система удержания в полосе, которая состоит из фронтальной камеры и вычислительного блока. LKA удерживает автомобиль в полосе движения, когда водитель, например, отвлекся. Алгоритмы в вычислительном блоке получают данные от камеры и на их основе принимают решение о состоянии автомобиля на дороге. Система способна понимать, что автомобиль неконтролируемо движется к правой или левой полосе. В таких случаях подается звуковой сигнал для привлечения внимания водителя. При пересечении полосы система сама скорректирует угол поворота колес так, чтобы автомобиль остался в полосе движения. Система должна вмешиваться только в том случае, если осознает, что маневр между полосами движения не был вызван действием водителя.
Алгоритмы в вычислительном блоке получают данные от камеры и на их основе принимают решение о состоянии автомобиля на дороге. Система способна понимать, что автомобиль неконтролируемо движется к правой или левой полосе. В таких случаях подается звуковой сигнал для привлечения внимания водителя. При пересечении полосы система сама скорректирует угол поворота колес так, чтобы автомобиль остался в полосе движения. Система должна вмешиваться только в том случае, если осознает, что маневр между полосами движения не был вызван действием водителя.
ACC (Adaptive Cruise Control) — система адаптивного круиз-контроля, который позволяет выставить заданную скорость следования. Автомобиль сам ускоряется и притормаживает для поддержания нужной скорости, при этом водитель может убрать ногу с педалей газа и тормоза. Этот режим удобно использовать при езде по скоростным магистралям и автострадам. Адаптивный круиз контроль способен видеть препятствия впереди автомобиля и притормаживать для избежания столкновения с ними. Если впереди автомобиля едет другое транспортное средство с меньшей скоростью, ACC сбавит скорость и будет следовать за ним. При обнаружении статичного объекта, ACC сбавит скорость до полной остановки. Для обнаружения объектов перед автомобилем такая система использует радар с миллиметровым диапазоном длин волн. Обычно такие радары работают на частоте 24-72 ГГц и способны уверенно видеть объекты на расстоянии до 300 метров. Радар обычно установлен за передним значком на решетке радиатора.
Если впереди автомобиля едет другое транспортное средство с меньшей скоростью, ACC сбавит скорость и будет следовать за ним. При обнаружении статичного объекта, ACC сбавит скорость до полной остановки. Для обнаружения объектов перед автомобилем такая система использует радар с миллиметровым диапазоном длин волн. Обычно такие радары работают на частоте 24-72 ГГц и способны уверенно видеть объекты на расстоянии до 300 метров. Радар обычно установлен за передним значком на решетке радиатора.
PCS (Pre-Collision System) — система предотвращения столкновения. Система призвана предотвратить столкновение с автомобилем, который движется впереди. При неизбежности столкновения, система минимизирует урон от столкновения. Здесь так же используются радар для оценки расстояния до объекта и фронтальная камера для его распознавания. Фронт PCS прогнозирует вероятность столкновения на основе скорости автомобиля, расстояния до объекта и его скорости. Обычно у системы есть два этапа срабатывания. Первый этап — система звуком и индикацией на приборной панели оповещает об опасности водителя. Второй этап — активируется экстренное торможение с помощью системы ABS, и включаются преднатяжители ремней безопасности.
Второй этап — активируется экстренное торможение с помощью системы ABS, и включаются преднатяжители ремней безопасности.
Практическая часть
Управление рулем
Первое, что захотелось сделать нашей команде, — это научиться рулить. Рулем в автомобиле могут управлять две системы: парковочный ассистент IPAS (Intelligent Park Assist) и LKA.
IPAS позволяет задавать напрямую угол поворота рулевого колеса в градусах. Так как в нашем автомобиле нет данной системы, проверить и освоить рулевое управление таким способом нельзя.
Поэтому мы изучили электрические схемы автомобиля и поняли, какие CAN-шины могут быть полезны. Мы подключили анализатор CAN-шины. Лог содержит файл записей сообщений в шине в хронологической последовательности. Наша задача была найти команды управления электроусилителем руля EPS (Electric Power Steering). Мы сняли лог поворота рулевого колеса из стороны в сторону, в логе смогли найти показания угла поворота и скорость вращения рулевого колеса. Ниже пример изменения данных в шине CAN. Интересующие нас данные выделены маркером.
Ниже пример изменения данных в шине CAN. Интересующие нас данные выделены маркером.
Поворот руля влево на 360 градусов
Поворот руля вправо на 270 градусов
Следующим этапом мы исследовали систему удержания в полосе. Для этого мы выехали на тихую улицу и записали логи обмена между блоком удержания в полосе и DSU (Driving Support ECU). С помощью анализатора шины CAN нам удалось вычислить сообщения от системы LKA. На рисунке 6 изображена команда управления EPS.
Рис. 5. Команда управления рулем с помощью системы LKA
LKA управляет рулем путем задания значения момента на валу (STEER_TORQUE_CMD) рулевого колеса. Команду принимает модуль EPS. Каждое сообщение содержит в заголовке значение счетчика (COUNTER), которое инкрементируется при каждой отправке. Поле LKA_STATE содержит информацию о состоянии LKA. Для захвата управления необходимо выставлять бит STEER_REQUEST.
Сообщения, которые отвечают за работу важных систем авто, защищаются контрольной суммой (CHECKSUM) для минимизации рисков ложного срабатывания. Автомобиль проигнорирует такую команду, если сообщение содержит некорректную контрольную сумму или значение счетчика. Это встроенная производителем защита от вмешательств сторонних систем и помех в линии связи.
Автомобиль проигнорирует такую команду, если сообщение содержит некорректную контрольную сумму или значение счетчика. Это встроенная производителем защита от вмешательств сторонних систем и помех в линии связи.
На графике (Рис. 6.) представлена диаграмма работы LKA. Torque Sensor — значение с датчика момента на торсионном валу. Torque Cmd — команда от LKA для управления рулем. Из картинки видно, как происходит подруливание LKA для удержания автомобиля в полосе. При переходе через ноль меняется направление поворота руля. Т.е. отрицательное значение сигнала говорит о повороте вправо, положительное — влево. Удержание команды в нуле говорит об отсутствии управления со стороны LKA. При вмешательстве водителя, система перестает выдавать управление. О вмешательстве водителя LKA узнает с помощью второго датчика момента на валу со стороны рулевого колеса.
Рис. 6. График работы системы LKA
Нам предстояло проверить работу команды управления рулем. С помощью модуля StarLine Сигма 10 мы подготовили прошивку для проверки управления.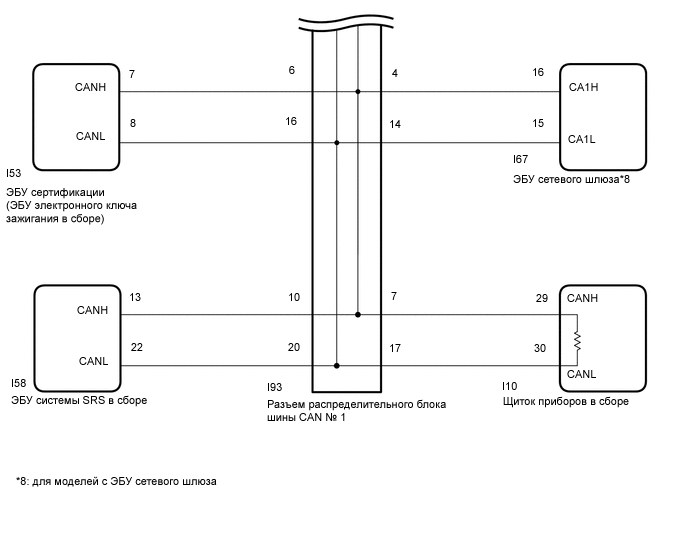 StarLine Сигма 10 должен выдавать в CAN-шину команды на поворот руля влево или вправо. На тот момент у нас не было графического интерфейса для управления модулем, поэтому пришлось использовать штатные средства автомобиля. Мы нашли в CAN-шине статус положения рычага круиз-контроля и запрограммировали модуль таким образом, что верхнее положение рычага приводило к повороту руля вправо, нижнее положение — к повороту влево (Рис. 7).
StarLine Сигма 10 должен выдавать в CAN-шину команды на поворот руля влево или вправо. На тот момент у нас не было графического интерфейса для управления модулем, поэтому пришлось использовать штатные средства автомобиля. Мы нашли в CAN-шине статус положения рычага круиз-контроля и запрограммировали модуль таким образом, что верхнее положение рычага приводило к повороту руля вправо, нижнее положение — к повороту влево (Рис. 7).
Рис. 7. Первые попытки рулить
На видео видно, что управление осуществляется короткими секциями. Это возникает по нескольким причинам.
Первая из причин — это отсутствие обратной связи. Если расхождение между сигналом Torque Cmd и Torque Sensor превышает определенное значение Δ, система автоматически перестает воспринимать команды (Рис. 8). Мы настроили алгоритм на корректировку выдаваемой команды (Torque CMD) в зависимости от значения момента на валу (Torque Sensor).
Рис. 8. Расхождение сигнала приводит к ошибке работы системы
Следующее ограничение связано с системой защиты встроенной в EPS. Система EPS не позволяет командами от LKA рулить в широком диапазоне. Что вполне логично, т.к. при езде по дороге резкое маневрирование не безопасно. Таким образом, при превышении порогового значения момента на валу, система LKA выдает ошибку и отключается (Рис. 9).
Система EPS не позволяет командами от LKA рулить в широком диапазоне. Что вполне логично, т.к. при езде по дороге резкое маневрирование не безопасно. Таким образом, при превышении порогового значения момента на валу, система LKA выдает ошибку и отключается (Рис. 9).
Рис. 9. Превышение порогового значения регулировки момента на валу
Независимо от того, активирована система LKA или нет, сообщения с командами от нее присутствуют в шине постоянно. Мы посылаем модулю EPS команду повернуть колеса с конкретным усилием влево или вправо. А в это время LKA перебивает наши посылки «пустыми» сообщениями. После нашей команды со значением момента, приходит штатная с нулевым (Рис. 10).
Рис. 10. Штатные сообщения приходят с нулевыми значениями момента и перебивают наше управление
Тогда мы, с помощью модуля StarLine Сигма 10, смогли фильтровать весь трафик от LKA и блокировать сообщения с ID 2E4, когда нам это было нужно. Это решило проблему, а нам удалось получить плавное управления рулем (Рис. 2, ACCEL_CMD = 1000 (0x03E8).
2, ACCEL_CMD = 1000 (0x03E8).
Рис. 12. Команда управления ускорения/замедления автомобиля
Мы сняли логи со штатной системы ACC и проанализировали команды. Сравнили с имеющимся у нас описанием команд и приступили к тестированию.
Рис. 13. Лог управления ускорением/замедлением системы адаптивного круиз-контроля ACC (выделено маркером)
Здесь не обошлось без трудностей. Мы выехали на дорогу с оживленным трафиком для тестирования команды ускорения. Команды управления ускорением или замедлением автомобиля работают только при активированном круиз контроле, не достаточно активировать его кнопкой. Необходимо найти движущийся впереди автомобиль и включить режим следования за ним.
Рис. 14. Активация круиз контроля происходит при наличии впереди другого траснпортного средства
С помощью модуля StarLine Сигма 10 посылаем команду ускорения, и автомобиль начинает набирать скорость. К этому моменту мы подключили графический интерфейс для управления модулем StarLine Сигма 10. Теперь мы управляем рулем, ускорением и торможением с помощью кнопок в приложении.
Теперь мы управляем рулем, ускорением и торможением с помощью кнопок в приложении.
Команды работали до тех пор, пока не потеряли автомобиль впереди. Система круиз-контроля отключилась, а следовательно, и команды ускорения перестали работать.
Мы приступили к исследованию возможности использовать команды без активного круиз-контроля. Пришлось много времени потратить на анализ данных в шине CAN, чтобы понять как создать условия для работы команд. Нас интересовало, в первую очередь, какой блок блокирует выполнение команд ACC на ускорение или замедление. Пришлось изучить какие ID идут от DSU, LKA, радара и камеры, подсовывая липовые данные различных датчиков.
Решение пришло спустя 3 недели. К тому времени мы представляли как происходит взаимодействие блоков автомобиля, провели исследование трафика сообщений и выделили группы сообщений, посылаемых каждым блоком. За работу адаптивного круиз-контроля ACC отвечает блок Driving Support ECU (DSU). DSU выдает команды на ускорение и замедление автомобиля, и именно этот блок получает данные от радара миллиметрового диапазона. Радар сообщает DSU на каком расстоянии от машины движется объект, с какой относительной скоростью и определяет его положение по горизонтали (левее, правее или по центру).
Радар сообщает DSU на каком расстоянии от машины движется объект, с какой относительной скоростью и определяет его положение по горизонтали (левее, правее или по центру).
Наша идея заключалась в подмене данных радара. Мы сняли лог следования за автомобилем, вытащили из него данные радара в момент следования. Теперь, после включения круиз-контроля, мы посылаем фейковые данные о наличии впереди идущего авто. Получается обманывать наш автомобиль, говоря что впереди движется другое авто на конкретном расстоянии.
a) б)
Рис. 15. Активация круиза: a) попытка активировать без подмены данных радара; б) активация при подмене данных от радара.
Когда запускаем нашу обманку, на приборной панели загорается значок наличия впереди идущего автомобиля. Теперь мы можем тестировать наше управление. Запускаем команду на ускорение, и автомобиль начинает быстро ускоряться.
Как мы уже узнали, команда на ускорение и замедление одна. Поэтому тут же проверили и замедление. Поехали на на скорости с активным круиз-контролем, запустили команду на торможение, и авто сразу же замедлилось.
В итоге сейчас получается разгонять и замедлять автомобиль именно так, как нам было нужно.
Что еще мы используем
Для создания беспилотника необходимо управление вспомогательными системами: поворотниками, стоп-сигналами, аварийной сигнализацией, клаксоном и пр. Всем этим так же можно управлять по CAN шине.
Оборудование и ПО
Для работ с автомобилем сегодня мы используем набор различного оборудования:
- Анализатор шины Marathon позволяет подключать и читать данные с двух шин одновременно. На сайте производителя анализатора есть бесплатное ПО для анализа логов. Но мы используем ПО, написанное в нашей компании для внутреннего пользования.
- Модуль StarLine Сигма 10 мы используем как платформу для работы с цифровыми интерфейсами. Модуль поддерживает CAN и LIN интерфейсы. При исследовании автомобиля пишем программы на C, зашиваем их в модуль и проверяем работу. Из модуля можем сделать сниффер трафика CAN-шины. Сниффер нам помогает понять, какие ID идут от блока или блокировать сообщения от штатных систем.

- Диагностическое оборудование Toyota/Lexus. С помощью этого оборудования можно найти команды управления системами автомобиля: поворотниками, стоп-сигналами, клаксоном, индикацией приборки.
Сегодня ведется активная работа по разработке беспилотного автомобиля, в ближайших планах реализация экстренного торможения перед препятствиями, их объезда и перестраивание маршрута автомобиля в зависимости от дорожной ситуации и указаний водителя.
Беспилотный автомобиль StarLine — это открытая площадка для объединения лучших инженерных умов России и мира с целью создания прогрессивных технологий беспилотного вождения, которые сделают наше будущее безопасным и комфортным.
CAN-шина – это электронное устройство, встроенное в электронную систему автомобиля для контроля технических характеристики и ездовых показателей. Она является обязательным элементом для оснащения автомобиля противоугонной системой, но это лишь малая часть её возможностей.
Что такое CAN шина
CAN-шина – это одно из устройств в электронной автоматике автомобиля, на которое возлагается задача по объединению различных датчиков и процессоров в общую синхронизированную систему. Она обеспечивает сбор и обмен данными, посредством чего в работу различных систем и узлов машины вносятся необходимые корректировки.
Она обеспечивает сбор и обмен данными, посредством чего в работу различных систем и узлов машины вносятся необходимые корректировки.
Аббревиатура CAN расшифровывается как Controller Area Network, то есть сеть контроллеров. Соответственно, CAN-шина – это устройство, принимающее информацию от устройств и передающее между ними. Данный стандарт был разработан и внедрён более 30 лет назад компанией Robert Bosch GmbH. Сейчас его используются в автомобилестроении, промышленной автоматизации и сфере проектирования объектов, обозначаемых «умными», например, домов.
Как работает CAN шина
Фактически, шина представляет собой компактное устройство со множеством входов для подключения кабелей или разъём, к которому подсоединяются кабели. Принцип её действия заключается в передаче сообщений между разными компонентами электронной системы.
Для передачи разной информации в сообщения включаются идентификаторы. Они уникальны и сообщают, например, что в конкретный момент времени автомобиль едет со скоростью 60 км/ч. Серия сообщения отправляется на все устройства, но благодаря индивидуальным идентификаторам они обрабатывают только те, которые предназначаются именно для них. Идентификаторы CAN-шины могут иметь длину от 11 до 29 бит.
Серия сообщения отправляется на все устройства, но благодаря индивидуальным идентификаторам они обрабатывают только те, которые предназначаются именно для них. Идентификаторы CAN-шины могут иметь длину от 11 до 29 бит.
В зависимости от назначения КАН шины разделяются на несколько категорий:
- Силовые. Они предназначены для синхронизации и обмена данными между электронным блоком двигателя и антиблокировочной системой, коробкой передач, зажиганием, другими рабочими узлами автомобиля.
- Комфорт. Эти шины обеспечивают совместную работу цифровых интерфейсов, которые не связаны с ходовыми блоками машины, а отвечают за комфорт. Это система подогрева сидений, климат-контроль, регулировка зеркал и т.п.
- Информационно-командные. Эти модели разработаны для оперативного обмена информацией между узлами, отвечающими за обслуживание авто. Например, навигационной системой, смартфоном и ЭБУ.
Для чего CAN шина в автомобиле
Распространение интерфейса КАН в автомобильной сфере связано с тем, что он выполняет ряд важных функций:
- упрощает алгоритм подсоединения и функционирования дополнительных систем и приборов;
- снижает влияние внешних помех на работу электроники;
- обеспечивает одновременное получение, анализ и передачу информации к устройствам;
- ускоряет передачу сигналов к механизмам, ходовым узлам и иным устройствам;
- уменьшает количество необходимых проводов;
В современном автомобиле цифровая шина обеспечивает работу следующих компонентов и систем:
- центральный монтажный блок и замок зажигания;
- антиблокировочная система;
- двигатель и коробка переключения передач;
- подушки безопасности;
- рулевой механизм;
- датчик поворота руля;
- силовой агрегат;
- электронные блоки для парковки и блокировки дверей;
- датчик давления в колёсах;
- блок управления стеклоочистителями;
- топливный насос высокого давления;
- звуковая система;
- информационно-навигационные модули.

Этот не полный список, так как в него не включаются внешние совместимые приборы, которые тоже можно соединить с шиной. Часто таким образом подключается автомобильная сигнализация. CAN-шина также доступна для подключения внешних устройств для мониторинга рабочих показателей и диагностики на ПК. А при подключении автосигнализации вместе с маяком можно управлять отдельными системами извне, например, со смартфона.
Читайте также: Что такое центральный замок в автомобиле.
Плюсы и минусы CAN шины
Специалисты по автомобильной электронике, высказываясь в пользу использования CAN-интерфейса, отмечают следующие преимущества:
- простой канал обмена данными;
- скорость передачи информации;
- широкая совместимость с рабочими и диагностическими приборами;
- более простая схема установки автосигнализации;
- многоуровневый мониторинг и контроль интерфейсов;
- автоматическое распределение скорости передачи с приоритетом в пользу основных систем и узлов.

Но есть у CAN-шины и функциональные недостатки:
- при повышенной информационной нагрузке на канал вырастает время отклика, что особенно характерно для работы автомобилей, «напичканных» электронными устройствами;
- из-за использования протокола высшего уровня встречаются проблемы стандартизации.
Возможные проблемы с CAN шиной
По причине включения во многие функциональные процессы, неполадки в работе CAN-шины проявляются очень быстро. Среди признаков нарушений чаще всего проявляются:
- индикация вопросительного знака на приборной панели;
- одновременное свечение нескольких лампочек, например, CHECK ENGINE и ABS;
- исчезновение показателей уровня топлива, оборотов двигателя, скорости на приборной панели.
Такие проблемы возникают по разным причинам, связанным с питанием или нарушением электроцепи. Это может быть замыкание на массу или аккумулятор, обрыв цепи, повреждение перемычек, падение напряжения из-за проблем с генератором или разряд АКБ.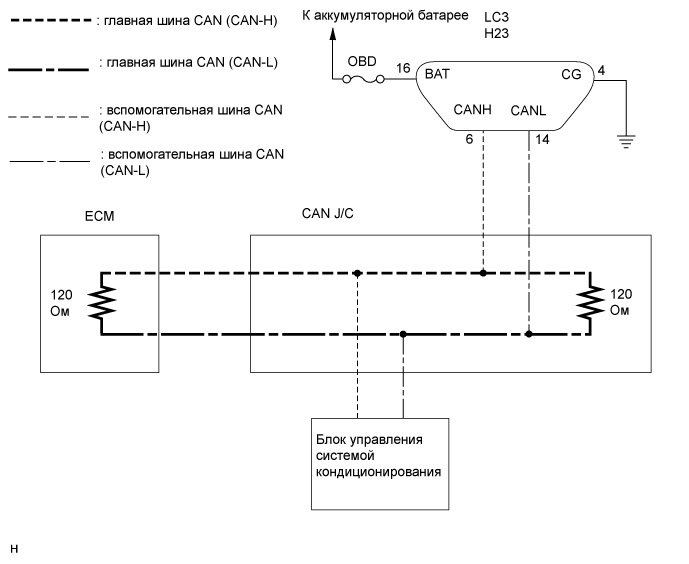
Первая мера для проверки шины – компьютерная диагностика всех систем. Если она показывает шину, необходимо измерить напряжение на выводах H и L (должно быть
4V) и изучить форму сигнала на осциллографе под зажиганием. Если сигнала нет или он соответствует напряжению сети, налицо замыкание или обрыв.
Ввиду сложности системы и большого количества подключений компьютерную диагностику и устранение неисправностей целесообразно передать в руки специалистов с высококачественным оборудованием.
Читайте также: Что такое адаптивный круиз контроль и для чего он нужен.
http://autodvig.com/electrika/can-shina-eto-65069/
Источник http://habr.com/ru/post/450140/
http://avtonov.com/can-%D1%88%D0%B8%D0%BD%D0%B0-%D0%B2-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5-%D1%87%D1%82%D0%BE-%D1%8D%D1%82%D0%BE-%D1%82%D0%B0%D0%BA%D0%BE%D0%B5/
Курт Буш выводит Jordan Brand на полосу победы в Канзасе
КАНЗАС-СИТИ, штат Канзас (AP) — Курт Буш медленно вел свою машину в стиле Jordan Brand к полосе победы на Канзасской гоночной трассе в воскресенье, когда владелец автомобиля Денни Хэмлин остановил его на своем следы, высунул голову в окно и сказал: «Мы сделали это».
Были ли они когда-либо.
Буш пережил утомительный день износа шин, затем обогнал Кайла Ларсона и вышел вперед за восемь кругов до финиша, а затем уехал от действующего чемпиона NASCAR Cup Series, чтобы впервые выиграть в Канзасе — и сдаться. Будущая команда 23XI Racing, принадлежащая Хэмлину, и великий игрок НБА Майкл Джордан одержали вторую победу в истории.
«Это самая приятная часть — помочь этим парням победить», — сказал Буш. «Все дело в командной работе. Я делаю это не один».
У Ларсона была доминирующая машина, он ехал в верхней части овала длиной в полторы мили, но Буш мог поставить свою Toyota практически везде, где хотел. Это окупилось, когда эти двое были бок о бок с восемью до конца, и Буш потеснил Ларсона, который коснулся стены и потерял достаточно импульса, чтобы уступить лидерство — и победить.
Буш остановил свой автомобиль под номером 45 — один из номеров, которые Джордан носил на протяжении всей своей карьеры — к линии старт-финиш и вылез из окна, прежде чем триумфально вскинуть руки. пожарный костюм.
пожарный костюм.
Это была вторая победа 23XI после победы Буббы Уоллеса в прошлом году в Талладеге, и это произошло в самый неожиданный момент; ни один из гонщиков команды не финишировал в первой десятке в этом сезоне.
«Знаете, мы как организация подвели этих парней — я говорю о Буббе и Курте, обо всех ошибках, которые мы совершили на пит-роуд, и еще о чем-то», — сказал Хэмлин. «Но давайте поговорим о плюсах. Я не могу отблагодарить Курта. Первая гонка Джордана Брэнда, так ревниво, что он водит эту машину, а потом эта штука так быстро там, да, просто — у меня никогда не было такого чувства, даже к победе для меня, не говоря уже о том, когда Я не выиграл. Это другое.»
Не было ничего плохого и в том, как Буш мчался к финишу.
«Он так и не проникся ко мне. Я пытаюсь выжать газ, чтобы занять позицию на нем, и просто напрягся», — сказал Ларсон. «Было весело участвовать в гонках с Куртом во второй половине гонки. Я очень старался все это время».
Без шуток. В какой-то момент, когда оставалось 85 очков, Ларсон чуть не улетел в сторону, участвуя в гонке с Бушем за лидерство во втором повороте. «Я немного боролся с пробками, он смог проехать и оттуда. Я просто хотел удержаться на втором месте. Просто сегодня очень тяжело боролся».
В какой-то момент, когда оставалось 85 очков, Ларсон чуть не улетел в сторону, участвуя в гонке с Бушем за лидерство во втором повороте. «Я немного боролся с пробками, он смог проехать и оттуда. Я просто хотел удержаться на втором месте. Просто сегодня очень тяжело боролся».
Одной из главных сюжетных линий в начале недели было то, как поведут себя шины под автомобилем Next Gen во время его дебюта в Канзасе, особенно после того, как у нескольких гонщиков, включая Джоуи Логано, возникли проблемы с проседанием задней части на тренировке.
Во время воскресного второго этапа снова начались проблемы.
Уильям Байрон, которого Логано оттолкнул с дороги в спорном финише на прошлой неделе в Дарлингтоне, бежал впереди, когда его шина оторвалась. Как только Байрон хромал по пит-роуд, поул-ситтер Тайлер Реддик упал задним ходом и коснулся стены. У Мартина Труекса-младшего была такая же проблема с шинами на последнем круге этапа.
«Наши инженеры разговаривали со всеми, у кого возникали проблемы на тренировке», — сказал Грег Стакер, гоночный директор Goodyear, который перед выходными посоветовал командам увеличить давление воздуха в задней части, чтобы учесть нагрузки.
«Мы хотели убедиться, что все в курсе ситуации».
У Эрика Джонса была совершенно другая проблема с шинами: его бригада не могла открутить заднюю гайку. безрезультатно, тяжелый удар для команды Petty GMS Motorsports, которая находится за пределами плей-офф.0003
Кайл Буш, у которого ранее на этой неделе родилась дочь Ленникс Ки, сумел избежать проблем с шинами и удержать Росса Честейна и Чейза Эллиотта, чтобы выиграть первый этап в воскресенье. Его старший брат Курт опередил его на финише и вышел на второй этап, а Эллиот снова оказался третьим.
Затем та же самая проблема с шинами настигла Эллиотта, чья задняя часть провалилась и заставила его крутиться по трассе за 70 кругов до финиша. Эллиотту повезло, что его № 9 не попал в стену, прежде чем он остановился на грязном приусадебном участке.
Кайл Буш надеялся забрать домой трофей своей новорожденной дочери, которую он приветствует вместе с женой Самантой после долгой и публичной борьбы с бесплодием. Но, несмотря на сильную машину весь день, он остановился на третьем месте.
Может быть, ее дядя когда-нибудь сможет принести этот трофей.
«Наконец-то я покорил эту трассу», — сказал Курт Буш. «Я не могу в это поверить».
ЛУЧШИЙ ИЗ ОСТАЛЬНЫХ
Кристофер Белл превратил свой третий поул в сезоне в пятое место. Труекс оправился от проблем с шинами и финишировал шестым, а Честейн, Рики Стенхаус-младший, Алекс Боуман и Уоллес замкнули первую десятку.0003
СЛАВА УКРАИНА
Джош Билицки использовал цвета украинского флага на своем автомобиле № 77 для Spire Motorsports, чтобы продемонстрировать поддержку гуманитарных усилий, проводимых в раздираемой войной стране. Несколько городов Украины, в том числе Киев и Мариуполь, также были включены в схему окраски вместе со знаками отличия Украинско-американского координационного совета.
UP NEXT
Серия берет перерыв в регулярном сезоне перед Coca-Cola 600 и отправляется в Техас на гонку All-Star на следующих выходных.
___
Другие автогонки AP: https://apnews. com/hub/auto-racing и https://twitter.com/AP_Sports
com/hub/auto-racing и https://twitter.com/AP_Sports
Copyright 2022 Associated Press. Все права защищены. Этот материал нельзя публиковать, транслировать, переписывать или распространять без разрешения.
Шины, тормоза, замена масла и ремонт автомобилей рядом с Клио, Мичиган
Автомобильные услуги в Монро
Kan Rock Tire / Monro Auto Service and Tire Center может сэкономить вам 50% по сравнению с отделом дилерского обслуживания на автомобильных услугах. Мы также являемся одним из крупнейших дилеров шин в США, у нас на складе тысячи шин известных брендов, готовых к установке.
- Новые шины
- Смена масла
- Тормозная служба
- Проверьте свет двигателя
- Другой
Посмотреть все услуги
Current предлагает
Общее обслуживание
ЛУЧНЫЕ ЛОВИТЕЛЬСТВА
$ 11,99/Blade
, в то время как поставки в последний раз
. Проверка, бесплатный осмотр шин
Проверка, бесплатный осмотр шин
Автотехобслуживание
БЕСПЛАТНО*
ПРОВЕРКА САЛОСОВАНИЯ
ПОМОГАЕТ ПРОДЛИТЬ СРОК СЛУЖБЫ ВАШЕГО АВТОМОБИЛЯ
Общее техническое обслуживание
Лзовочные лезвия
$ 11,99/лезвия
, в то время как поставки в последний раз
Auto Maintenge
БЕСПЛАТНЫ БЕСПЛАТНО*
ПРОВЕРКА САЛОСОВАНИЯ
ПОМОГАЕТ ПРОДЛИТЬ СРОК СЛУЖБЫ ВАШЕГО АВТОМОБИЛЯ
РЕКОМЕНДУЕМЫЕ МАРКИ ШИН
Принесите свой автомобиль или грузовик в автосервис и шинный центр Kan Rock Tire / Monro в Клио, штат Мичиган, и сэкономьте до 50% по сравнению с отделом обслуживания дилера на техническом обслуживании! Мы составим график обслуживания вашего производителя, проверим необходимые компоненты на текущий пробег и выполним все необходимые задачи по техническому обслуживанию. Попросите БЕСПЛАТНУЮ распечатку. Технические специалисты Kan Rock Tire / Monro Auto Service и Tire Center, от замены масла до тормозов и жидкостей, обеспечат бесперебойную работу вашего автомобиля в течение гарантийного срока.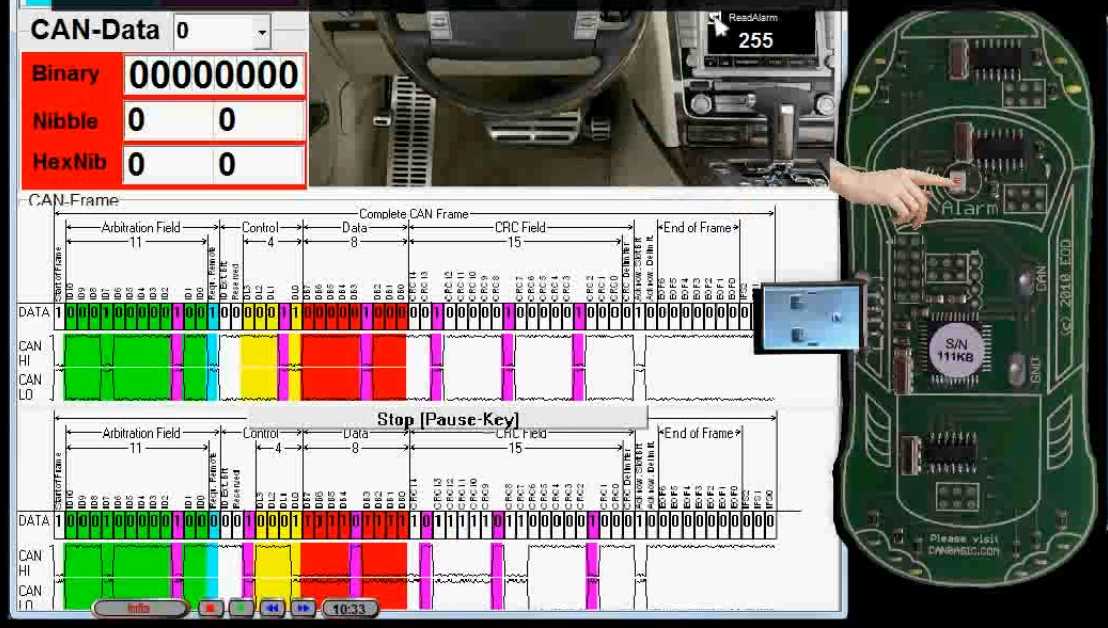
Принесите свой автомобиль или грузовик в автосервис и шинный центр Kan Rock Tire / Monro в Клио, штат Мичиган, и сэкономьте до 50% по сравнению с отделом обслуживания дилера на техническом обслуживании! Мы составим график обслуживания вашего производителя, проверим необходимые компоненты на текущий пробег и выполним все необходимые задачи по техническому обслуживанию. Попросите БЕСПЛАТНУЮ распечатку. Технические специалисты Kan Rock Tire / Monro Auto Service и Tire Center, от замены масла до тормозов и жидкостей, обеспечат бесперебойную работу вашего автомобиля в течение гарантийного срока.
Автосервис и шинный центр Kan Rock Tire / Monro в Клио, штат Мичиган, выполняет те же работы по техническому обслуживанию и ремонту, что и сервисный отдел вашего дилера, но по цене до 50 % дешевле. Начните экономить сегодня, доставив свой автомобиль в Monro для всех ваших потребностей в автосервисе и ремонте! Мы предоставляем бесплатную письменную смету и выполняем только ту работу, которую вы разрешаете, с письменной гарантией.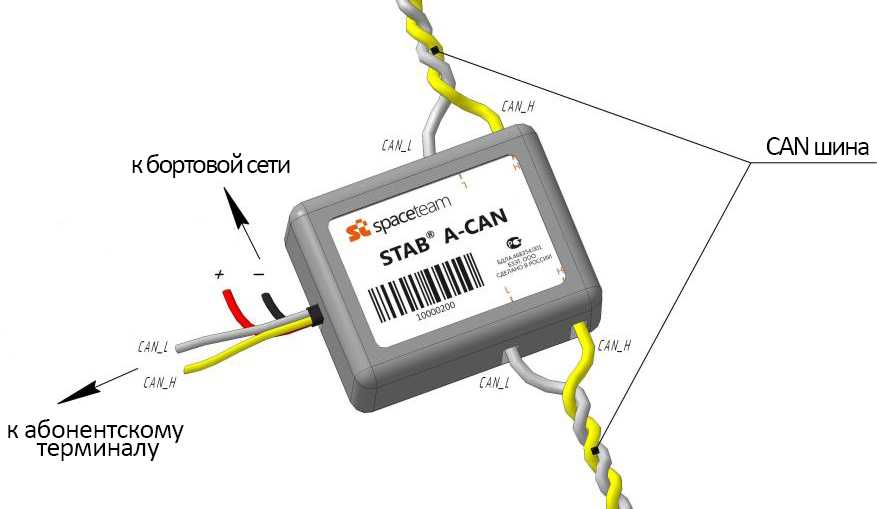
Услуги по ремонту
Центр автосервиса и шин Kan Rock Tire / Monro Auto в Клио, штат Мичиган, выполняет те же работы по техническому обслуживанию и ремонту, что и сервисный отдел вашего дилера, но по цене до 50% дешевле. Начните экономить сегодня, доставив свой автомобиль в Monro для всех ваших потребностей в автосервисе и ремонте! Мы предоставляем бесплатную письменную смету и выполняем только ту работу, которую вы разрешаете, с письменной гарантией. На все детали и услуги распространяется гарантия не менее трех месяцев или 4000 миль пробега. На многие детали, включая тормозные колодки и колодки, распространяется пожизненная гарантия.
Автосервис и шинный центр Kan Rock Tire / Monro Auto является четвертым по величине независимым дилером шин в стране. Каждое предложение по шинам включает шины, а также все необходимые услуги по установке и расходные материалы — монтаж, балансировку, резиновые штоки клапанов, перенос TPMS, утилизацию шин и многое другое. А наша 30-дневная поездка и гарантия лучшей цены означают, что вы не переплатите за свои шины и не застрянете с шинами, которые вам не нравятся. У нас есть тысячи легковых, легкогрузовых, спортивных и зимних шин… в наличии и готовых к установке в удобное для вас время.
Каждое предложение по шинам включает шины, а также все необходимые услуги по установке и расходные материалы — монтаж, балансировку, резиновые штоки клапанов, перенос TPMS, утилизацию шин и многое другое. А наша 30-дневная поездка и гарантия лучшей цены означают, что вы не переплатите за свои шины и не застрянете с шинами, которые вам не нравятся. У нас есть тысячи легковых, легкогрузовых, спортивных и зимних шин… в наличии и готовых к установке в удобное для вас время.
Tire Services
Автосервис и шинный центр Kan Rock Tire / Monro Auto является четвертым по величине независимым дилером шин в стране. Каждое предложение по шинам включает шины, а также все необходимые услуги по установке и расходные материалы — монтаж, балансировку, резиновые штоки клапанов, перенос TPMS, утилизацию шин и многое другое. А наша 30-дневная поездка и гарантия лучшей цены означают, что вы не переплатите за свои шины и не застрянете с шинами, которые вам не нравятся.
Автосервис и шинный центр Kan Rock Tire / Monro Auto в Клио, штат Мичиган, обеспечивает плановое техническое обслуживание вашего автомобиля для планового и профилактического ухода за автомобилем. Когда вы придете, мы составим контрольный список технического обслуживания вашего автомобиля для вашей конкретной модели и проверим необходимые компоненты для текущего пробега вашего автомобиля. Заводское плановое техническое обслуживание дает хорошую возможность убедиться, что ваш автомобиль работает правильно, и помогает предотвратить дорогостоящий ремонт в будущем. Кроме того, Kan Rock Tire / Monro Auto Service и Tire Center сэкономят вам до 50% по сравнению с дилером!
Марки автомобилей, которые мы обслуживаем и обслуживаем
Автосервис и шинный центр Kan Rock Tire / Monro в Клио, штат Мичиган, обеспечивает плановое техническое обслуживание вашего автомобиля для планового и профилактического ухода за автомобилем.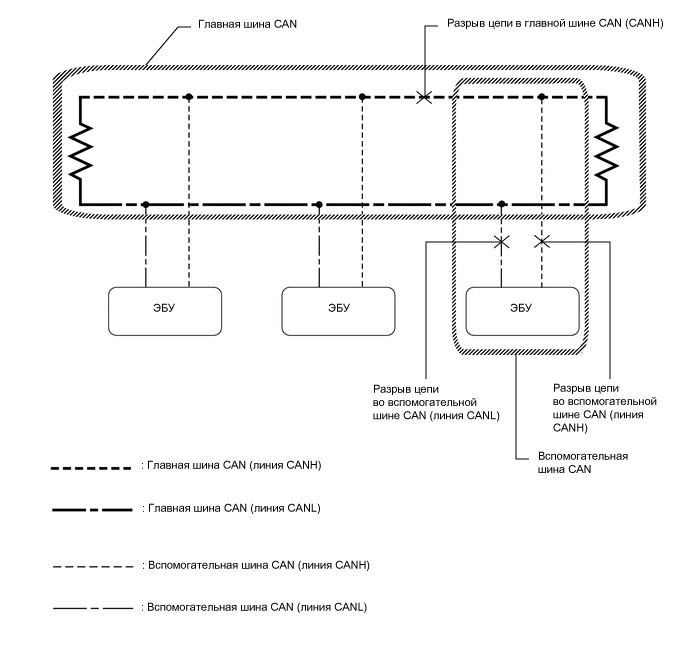 Когда вы придете, мы составим контрольный список технического обслуживания вашего автомобиля для вашей конкретной модели и проверим необходимые компоненты для текущего пробега вашего автомобиля. Заводское плановое техническое обслуживание дает хорошую возможность убедиться, что ваш автомобиль работает правильно, и помогает предотвратить дорогостоящий ремонт в будущем. Кроме того, Kan Rock Tire / Monro Auto Service и Tire Center сэкономят вам до 50% по сравнению с дилером!
Когда вы придете, мы составим контрольный список технического обслуживания вашего автомобиля для вашей конкретной модели и проверим необходимые компоненты для текущего пробега вашего автомобиля. Заводское плановое техническое обслуживание дает хорошую возможность убедиться, что ваш автомобиль работает правильно, и помогает предотвратить дорогостоящий ремонт в будущем. Кроме того, Kan Rock Tire / Monro Auto Service и Tire Center сэкономят вам до 50% по сравнению с дилером!
Близлежащие места
Monro Auto Service and Tire Centers
Флинт
706 Шоссе С. Дорт
Флинт, Мичиган 48503
Monro Auto Service and Tire Centers
Флинт
4420 Корунья Роуд
Флинт, Мичиган 48532
Monro Auto Service and Tire Centers
Флинт
5010 Миллер Роуд
Flint, MI 48507
ОБЗОРЫ
ПОСЛЕДНИЕ ОБЗОРЫ
ПОСМОТРЕТЬ ВСЕ
25. 09.22 Тим Джонс
09.22 Тим Джонс
Без комментариев
22.09.22 Рэйчел Джордан
Спасибо за то, что приняли меня правильно. Они сразу поняли, что случилось, и в течение нескольких часов вернули меня в целости и сохранности на дорогу. Спасибо вам всем
Взломщики Jeep вернулись, чтобы доказать, что взлом автомобилей может быть намного хуже исследователи безопасности преподносят новый урок: все могло быть — и могло быть — намного хуже.
Исследователи безопасности Чарли Миллер и Крис Валасек. Уитни Кертис для WIRED
Почти ровно год назад Chrysler объявил об отзыве 1,4 миллиона автомобилей после того, как пара хакеров продемонстрировала WIRED, что они могут удаленно взломать цифровые системы Jeep через Интернет. . Для Chrysler исправление было неприятным и дорогостоящим. Но теперь эти два исследователя вернулись с работой, которая требует от Chrysler и автомобильной промышленности представить альтернативную реальность, в которой вместо того, чтобы сообщать о своих исследованиях автопроизводителю, чтобы их можно было исправить, они продолжали работать над этим втайне. так, как поступили бы злонамеренные хакеры. При этом они разработали новый лайфхак, который преподносит отрезвляющий урок: все могло быть — и все еще может быть — намного хуже.
так, как поступили бы злонамеренные хакеры. При этом они разработали новый лайфхак, который преподносит отрезвляющий урок: все могло быть — и все еще может быть — намного хуже.
На конференции по безопасности Black Hat позже на этой неделе исследователи автомобильной кибербезопасности Чарли Миллер и Крис Валасек представят новый арсенал атак против того же Jeep Cherokee 2014 года, который они взломали в 2015 году. В прошлом году они удаленно взломали машину и парализовали ее. по шоссе I-64 — пока я ехал в пробке. Они могли даже отключить тормоза автомобиля на малых скоростях. Отправляя тщательно продуманные сообщения во внутреннюю сеть автомобиля, известную как CAN-шина, теперь они могут выполнять еще более опасные, беспрецедентные трюки, такие как непреднамеренное ускорение и удар по тормозам автомобиля или поворот рулевого колеса автомобиля на любой скорости. «Представьте, что в прошлом году вместо того, чтобы отключать передачу на шоссе, мы бы повернули руль на 180 градусов, — говорит Крис Валасек. Я могу представить. Но он все равно это проговаривает. «Ты бы не разговаривал с нами по телефону. Ты был бы мертв».
Я могу представить. Но он все равно это проговаривает. «Ты бы не разговаривал с нами по телефону. Ты был бы мертв».
В отличие от прошлого года, Миллер и Валасек, которые сейчас работают в Центре передовых технологий Uber, не могут выполнять эти новые атаки через Интернет — только с помощью ноутбука, напрямую подключенного к сети CAN Jeep через порт под приборной панелью. К счастью, их предыдущая работа помогла Chrysler создать обновление безопасности, чтобы исправить уязвимость, которая давала им прежний удаленный доступ к внутренностям Jeep. Однако этот взлом по-прежнему возможен на исправленных джипах, подобных тому, который они тестировали. И настоящая причина для расширения их атаки Jeep — продемонстрировать, как бы выглядели полные последствия цифровой атаки на автомобили или грузовики в отсутствие этого патча; Их атака на полной скорости на рулевое управление и ускорение Jeep — это то, что может произойти в следующий раз, когда опытные хакеры найдут точку опоры в беспроводной сети автомобиля.
И не заблуждайтесь, автомобильные хакеры говорят: рано или поздно будет найден другой метод беспроводной атаки на автомобиль.
«Удаленные уязвимости почти наверняка сохранятся и в будущем», — говорит Карл Кошер, исследователь из Калифорнийского университета в Сан-Диего, который в 2010 году нашел один из первых методов взлома автомобилей для Onstar компании GM. Миллер и Валасек По его словам, последняя работа показывает, что «если вы можете выбрать правильную шину CAN через эти уязвимости, вы можете использовать эти методы, чтобы получить довольно впечатляющий контроль над автомобилем».
Вот видео с их демонстрацией рулевой атаки:
Наиболее популярные
Как новые атаки работают
вместо фокусировки на этом начальном Wirofold, Letress Wirowld, и это. чтобы обойти комплекс защитных мер глубже в автомобильных сетях. Компоненты сети CAN автомобиля спроектированы так, чтобы противостоять определенным опасным цифровым сигналам: диагностический режим, который Миллер и Валасек использовали, например, для отключения тормозов джипа, не будет работать на любой скорости выше пяти миль в час, а функция автоматической помощи при парковке они используемый для поворота рулевого колеса, работал только тогда, когда автомобиль двигался задним ходом и двигался с такими же низкими скоростями.
Но теперь Миллер и Валасек нашли способы обойти некоторые из этих средств защиты, что привело к тревожным результатам. Вот как работали их новые атаки: вместо того, чтобы просто скомпрометировать один из так называемых электронных блоков управления или ECU в сети CAN целевого автомобиля и использовать его для подделки сообщений на рулевое управление или тормоза автомобиля, они также атаковали ECU, который отправляет законные команды. к тем компонентам, которые в противном случае противоречили бы их вредоносным командам и предотвращали их атаку. Переведя этот второй ECU в режим «bootrom» — первый шаг в обновлении прошивки ECU, который механик может использовать для исправления ошибки — они смогли парализовать этот невинный ECU и отправить вредоносные команды целевому компоненту без вмешательство. «У вас есть один компьютер в машине, который говорит ему делать одно, а мы говорим ему делать что-то другое», — говорит Миллер. «По сути, наше решение — отключить другой компьютер».
Результат: теперь они могут блокировать противоречивые сигналы, например, запрещающие активацию стояночного тормоза, и таким образом останавливать автомобиль на любой скорости за считанные секунды. А в сочетании с другой найденной ими уязвимостью в ЭБУ модуля рулевого управления они могут отключить рулевое управление, чтобы руль сопротивлялся попыткам водителя его повернуть. Они также могут самостоятельно поворачивать руль в цифровом виде на любой скорости. Миллер и Валасек говорят, что когда они проверяли эту последнюю атаку, двигаясь со скоростью 30 миль в час по пустой дороге, проходящей через кукурузные поля к северу от Сент-Луиса, они потеряли управление джипом, врезались в кювет и были вынуждены ждать дружеского столкновения. местный, чтобы отбуксировать их.
А в сочетании с другой найденной ими уязвимостью в ЭБУ модуля рулевого управления они могут отключить рулевое управление, чтобы руль сопротивлялся попыткам водителя его повернуть. Они также могут самостоятельно поворачивать руль в цифровом виде на любой скорости. Миллер и Валасек говорят, что когда они проверяли эту последнюю атаку, двигаясь со скоростью 30 миль в час по пустой дороге, проходящей через кукурузные поля к северу от Сент-Луиса, они потеряли управление джипом, врезались в кювет и были вынуждены ждать дружеского столкновения. местный, чтобы отбуксировать их.
В ходе отдельной атаки, которая не требует таких трюков с ECU bootrom, они также обнаружили, что могут включать и изменять настройки круиз-контроля Jeep, что позволяет им разгонять Jeep на десятки миль в час за несколько секунд. . Но они отмечают, что, как и в случае с любым круиз-контролем, водитель может просто нажать на тормоз, чтобы отключить это непреднамеренное ускорение, если заметит, что это происходит.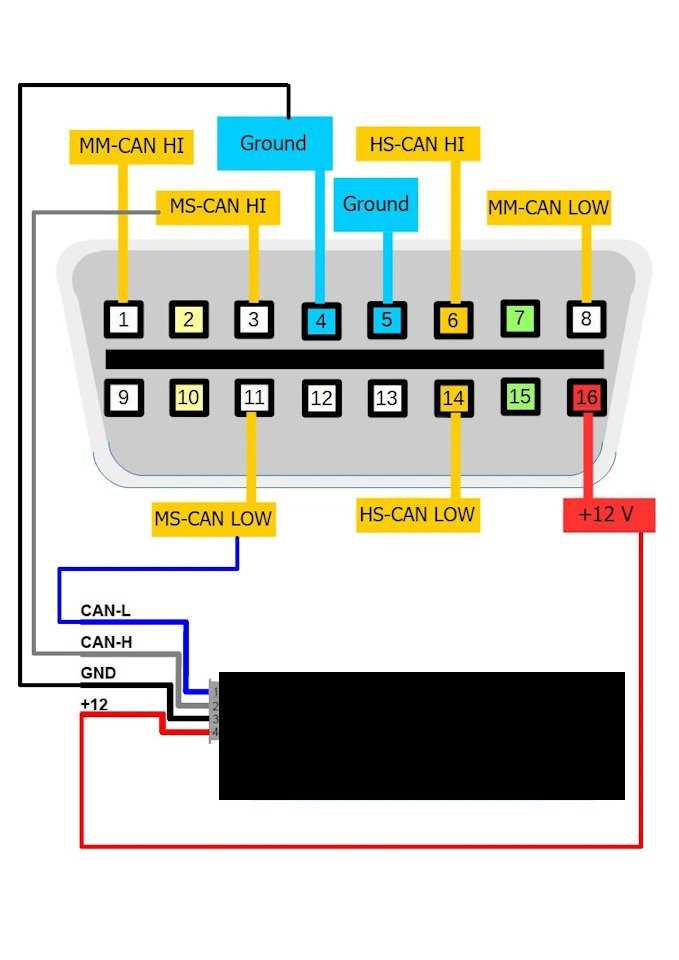 Миллер и Валасек признают, что осторожный водитель, держащий руль двумя руками, также может справиться с ударом руля. Но если нападение застало водителя врасплох, оно все равно могло нанести ущерб. «Я не могу просто взять под контроль машину и отвезти вас к себе домой, а вы не сможете меня остановить», — говорит Миллер. «Но если вы не обращаете внимания, это определенно опасно».
Миллер и Валасек признают, что осторожный водитель, держащий руль двумя руками, также может справиться с ударом руля. Но если нападение застало водителя врасплох, оно все равно могло нанести ущерб. «Я не могу просто взять под контроль машину и отвезти вас к себе домой, а вы не сможете меня остановить», — говорит Миллер. «Но если вы не обращаете внимания, это определенно опасно».
Наиболее популярные
Когда Wired обратилась к родительской компании Chrysler Fiat Chrystr . «Для этой демонстрации требовалось, чтобы компьютер был физически подключен к порту бортовой диагностики (OBD) автомобиля и присутствовал в автомобиле», — говорится в заявлении FCA. «Хотя мы восхищаемся их творчеством, похоже, что исследователи не нашли никакого нового удаленного способа взломать Jeep Cherokee 2014 года или другие американские автомобили FCA». В заявлении также утверждается, что Jeep Миллера и Валасека «похоже, был изменен на более старый уровень программного обеспечения», добавляет компания.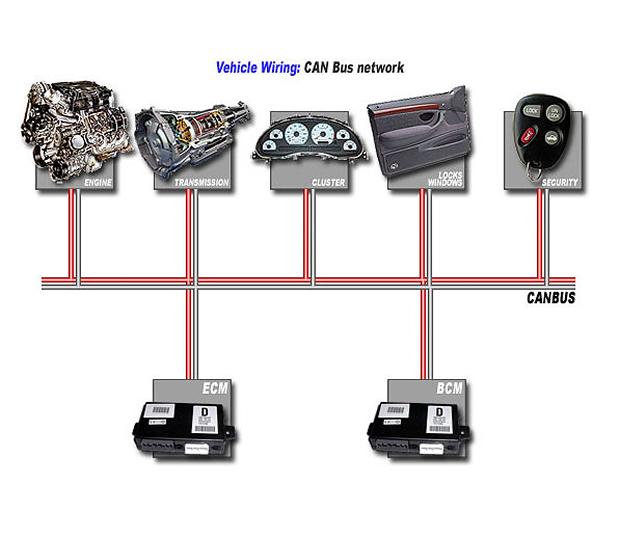 «Маловероятно, что этот эксплойт был бы возможен… если бы программное обеспечение автомобиля было на самом последнем уровне».
«Маловероятно, что этот эксплойт был бы возможен… если бы программное обеспечение автомобиля было на самом последнем уровне».
Миллер и Валасек подтверждают, что в рамках предыдущего тестирования они установили на свой джип более старую версию информационно-развлекательного программного обеспечения, исправленного Chrysler для предотвращения удаленных атак. Но они оспаривают утверждение Chrysler о том, что патч против удаленных атак имел бы какое-то значение: их последняя работа, по их словам, вообще не касалась этой информационно-развлекательной системы, а полностью сосредоточилась на других компонентах автомобиля.
Что это означает для будущих взломов автомобилей
Хотя Миллер и Валасек не нашли нового способа удаленного проведения своих атак, нетрудно представить новые возможности, которые хакеры могли бы найти для удаленного доступа к сети CAN Jeep или другим автомобилям. . В 2011 году исследователи из Калифорнийского университета в Сан-Диего и Вашингтонского университета нашли пути во внутренности Chevy Impala, которые включали все, от его подключения OnStar до взломанного смартфона, подключенного к его информационно-развлекательной системе через Bluetooth, до компакт-диска, содержащего вредоносный файл.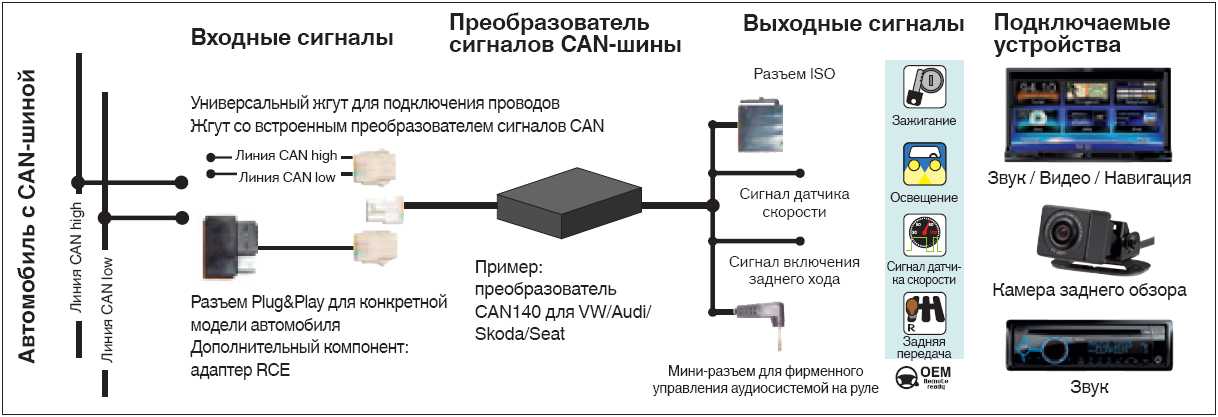 в свой проигрыватель компакт-дисков. А в прошлом году некоторые из тех же исследователей UCSD показали, что обычные подключенные к Интернету страховые ключи, подключенные к приборным панелям транспортных средств, могут создавать такие же уязвимости для удаленного взлома.
в свой проигрыватель компакт-дисков. А в прошлом году некоторые из тех же исследователей UCSD показали, что обычные подключенные к Интернету страховые ключи, подключенные к приборным панелям транспортных средств, могут создавать такие же уязвимости для удаленного взлома.
Как и эти ученые-исследователи, Миллер и Валасек не стремятся устроить автомобильный хаос, а скорее помогают встроить в автомобили лучшую защиту до того, как автомобильный взлом станет реальной угрозой. Они утверждают, что их работа показывает, что простая защита автомобилей от удаленных атак — не единственный уровень защиты, в котором нуждаются автопроизводители. Автопроизводителям также следует исходить из того, что хакеры в конечном итоге найдут удаленный плацдарм и создадут системы, которые снизят катастрофические последствия любого такого взлома. «Вам нужно знать, что хакеры собираются делать дальше, как смягчить последствия и почему некоторые меры не работают, что мы и показали», — говорит Миллер.
В документе, который они планируют опубликовать во время своего доклада о Black Hat, Миллер и Валасек рекомендуют автопроизводителям принять дополнительные меры для предотвращения подобных манипуляций с CAN, которые они продемонстрировали.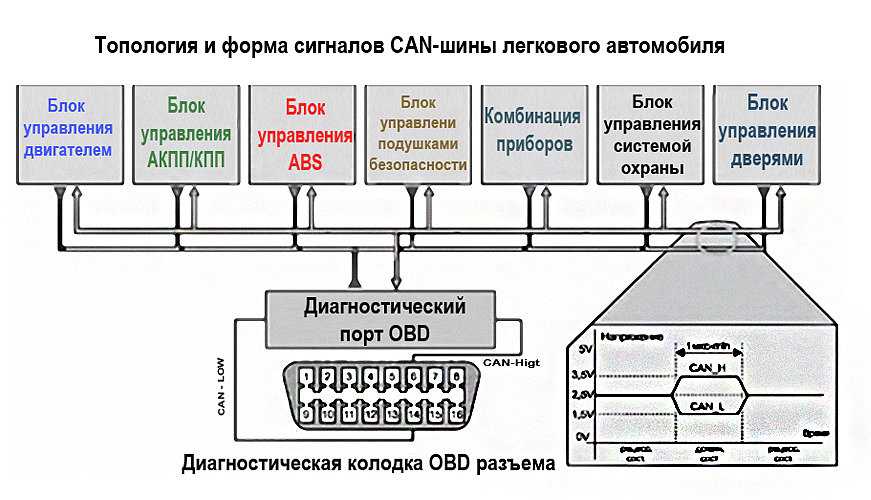 Например, автопроизводители не должны разрешать потенциально опасные диагностические тесты, если механик не нажмет на машину физический переключатель, считают они. Кроме того, они должны следить за сетью CAN на наличие признаков подобных атак с отключением ECU, которые они тестировали. Миллер, Валасек и еще одна группа исследователей безопасности транспортных средств фактически зашли так далеко, что создали прототипы устройств обнаружения проникновения в транспортные средства, предназначенные для обнаружения аномального движения и предупреждения водителя. Миллер и Валасек говорят, что их атака была бы обнаружена при каждой атаке, которую они совершили.
Например, автопроизводители не должны разрешать потенциально опасные диагностические тесты, если механик не нажмет на машину физический переключатель, считают они. Кроме того, они должны следить за сетью CAN на наличие признаков подобных атак с отключением ECU, которые они тестировали. Миллер, Валасек и еще одна группа исследователей безопасности транспортных средств фактически зашли так далеко, что создали прототипы устройств обнаружения проникновения в транспортные средства, предназначенные для обнаружения аномального движения и предупреждения водителя. Миллер и Валасек говорят, что их атака была бы обнаружена при каждой атаке, которую они совершили.
Самый популярный
Chrysler не игнорирует растущую угрозу взлома автомобилей. На самом деле, только в прошлом месяце компания запустила первую в Детройте программу «баунти-баунти», предлагая до 2500 долларов хакерам, которые сообщают компании о уязвимостях в ее автомобилях.