


Подруливающие задние колеса
В погоне за управляемостью автомобильные инженеры придумали поворачивать не только передние, но и задние колеса
Ходовая часть
Подруливающие задние колеса – система, улучшающая реакцию автомобиля на рулевое управления и стабилизирующая крены кузова при маневрах на высокой скорости.
История появления подруливающих задних колес
Совершенствование такого важного параметра, как управляемость, остается одним из приоритетных направлений при разработке новых автомобилей. Современные системы рулевого управления неплохо справляются со своими функциями, и разработчики в погоне за управляемостью, чаще всего идут по пути создания дополнительных устройств, не имеющих отношения к рулевому управлению .
К этим устройствам можно отнести антипробуксовочные системы и компьютерные системы управления курсовой устойчивостью.
Однако еще до массового внедрения микропроцессоров в системы управления автомобилем существовали разработки, позволявшие улучшить управляемости. К ним относятся и подруливающие задние колеса.
К ним относятся и подруливающие задние колеса.
Примеры оснащения подвижной техники подруливающими задними колесами можно найти еще в начала двадцатого века. Этот принцип давно используется в погрузчиках, работающих в замкнутых тесных пространствах складов, в заводских цехах и пр. Подруливающая задняя подвеска еще в довоенные времена применялась в тракторах и внедорожниках, к примеру, в довоенном джипе Mercedes Kübelwagen G5.
Подруливающие задние колеса и теория прохождения поворота
Даже при наличии самой прогрессивной конструкции подвески, к примеру, многорычажной, при движении на высокой скорости серьезным фактором, влияющим на управляемость, становится инерция прямолинейного движения задних колес, сопротивляющихся повороту. При повороте рулевого колеса, когда передние колеса начинают двигаться влево или вправо в направлении поворота, задние неуправляемые колеса пытаются оставаться на прежней траектории.
Типы подруливающей задней подвески и схемы работы
В самых ранних системах — к примеру, на тракторах двадцатых годов прошлого века, угол подруливания был большим, до 15 градусов. С повышением максимальной скорости от таких больших углов пришлось отказаться. В современных автомобилях системы подруливающих колес обеспечивают поворот максимум на 5-8 градусов.
С повышением максимальной скорости от таких больших углов пришлось отказаться. В современных автомобилях системы подруливающих колес обеспечивают поворот максимум на 5-8 градусов.
Задняя подруливающая подвеска делится на два вида — активную и пассивную.
Активная подруливающая подвеска
Если автомобиль оснащен активной подруливающей задней подвеской, все четыре колеса поворачивают сразу, реагируя на движение руля. В современных системах усилие от рулевого колеса на задние колеса передается не механически при помощи системы рычагов, а через команду электронного блока управления и втягивающие реле, иначе называемым актуаторами. Они передвигают задние рулевые тяги, схожие с теми, что применяются в основной системе рулевого управления.
Активная подруливающая подвеска работает в двух режимах. При движении на низкой скорости, к примеру, на автостоянке или при заезде в гараж, в момент, когда передние колеса повернуты вправо, задние поворачивают влево, и наоборот. Это дает возможность уменьшить радиус поворота на двадцать — двадцать пять процентов.
На высокой скорости схема работы меняется. При повороте передних колес влево, задние колеса подруливают в ту же сторону, но на меньший угол. За определением точного угла подруливания следит электронный блок управления, принимая в расчет показания датчика углового ускорения, датчика скорости и других, формируя оптимальный алгоритм прохождения виража.
Наибольшей известностью пользуются системы подруливающей задней подвески японских производителей. К примеру, компания Honda начала устанавливать в качестве опции подруливающие задние колеса на спорт-купе Prelude еще в 1987 году. В 1988 году такая же опция появилась у фирмы Mazda для моделеи 626 и МХ6. Американские производители также экспериментировали с подруливающими задними колесами. Система производства General Motors, носившая имя Quadrasteer, в качестве опции устанавливалась на внедорожники Suburban и Yukon, а также на пикап Silverado.
Система компании Nissan под именем HICAS в первые годы производства имела гидравлический привод и была объединена в единую схему с гидроусилителем рулевого управления.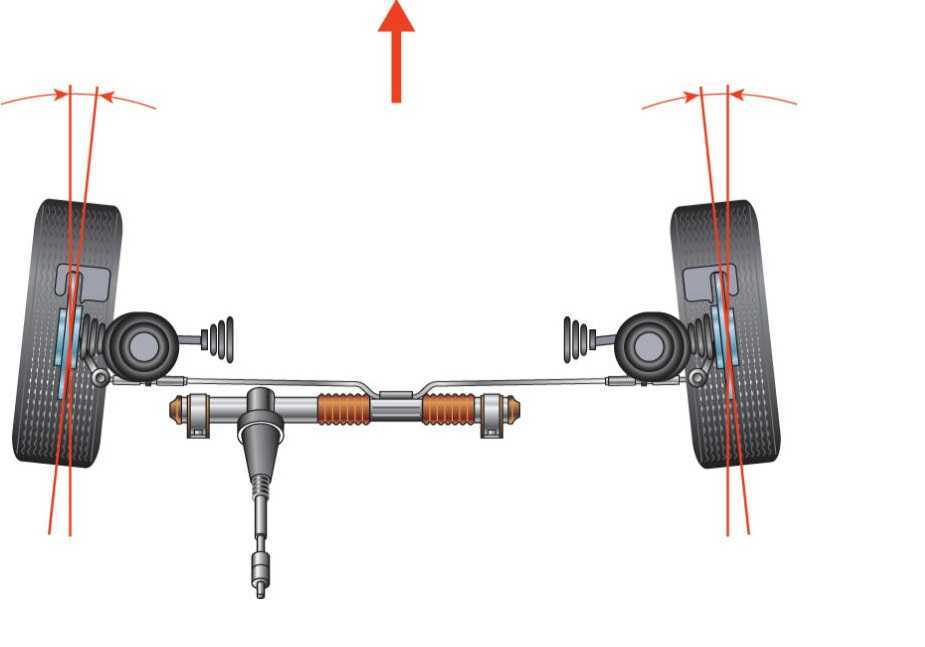
Европейские производители также не остались в стороне. К примеру, современная система подруливающих задних колес в автомобилях BMW назвывается Integral Active Steering.
Пассивная подруливающая подвеска
Во многих современных автомобилях применена упрощенная система подруливающих задних колес, противодействующая инерции прямолинейного движения за счет использования в подвеске элементов, обладающих определенными физическими свойствами. Такой тип подруливающей подвески называется пассивным. В автомобилях с пассивным подруливанием задняя подвеска строится по особой геометрии, и, как правило с применением подвижной тяги Уатта. Система рассчитана так, что при прохождении виража на высокой скорости задние колеса за счет перераспределения сил в подвеске имеют тенденцию подруливать в ту же сторону, что и передние.
По сути, принцип этот не нов, и в последние десятилетия при разработке подвески инженеры так или иначе учитывали свойства подруливания, однако ряд производителей, таких, к примеру, как Ford, уделяют конфигурации подвески особое внимание и выделяют конструкцию в особую систему.
|
Первые полноуправляемые версии, что появились
среди модификаций автомобилей Honda Prelude в 1987 году, снабжались
механической системой с хитроумной кинематической связью между рулевыми
рейками передних и задних колес. Кстати, тогда же на японском рынке
произошел настоящий полноуправляемый бум: Mitsubishi Galant и Sigma,
Mazda 626, а два года спустя и Toyota Celica — все обзавелись версиями с
управляемыми задними колесами. Применение систем управления всеми четырьмя колесами преследует три цели. Первая — получить переменную чувствительность автомобиля к повороту руля. Ведь при тихой езде по городским улочкам лучше иметь «острое» рулевое управление— чтобы не накручивать баранкой при каждом маневре. А на автостраде «острый» руль может вызвать проблемы — машина будет слишком резко реагировать даже на небольшие подруливания. Вторая цель — улучшить маневренность автомобиля при парковке или развороте в стесненных городских условиях, то есть уменьшить радиус поворота. И третья — повысить курсовую устойчивость при резких маневрах на высокой скорости. Нынешняя система 4WS (4 Wheel
Steer, то есть 4 управляемых колеса), устанавливаемая по заказу на купе
Honda Prelude 2,2 VTi, является развитием предыдущей
электронноуправляемой системы, которая в 1991 году сменила механическую.
Задние колеса здесь поворачиваются с помощью специального рулевого
механизма с электроприводом, встроенного в довольно сложную заднюю
подвеску. Работает система 4WS в двух режимах. На малой скорости задние колеса поворачиваются в сторону, противоположную передним, и при маневре той же кривизны руль нужно будет вращать на меньший угол. То есть чувствительность рулевого управления будет выше, а вдобавок автомобиль станет более маневренным. К примеру, при развороте передние колеса будут вывернуты до упора влево, а задние — вправо на угол до восьми градусов. Радиус разворота при этом уменьшится на 15% по сравнению с обычным автомобилем и составит всего 4,7 метра! А при движении на большой скорости — в быстром вираже или при
перестроении из ряда в ряд на автостраде, — задние колеса с помощью системы 4WS, наоборот,
будут поворачиваться на небольшой угол в ту же сторону, что и передние. |

 А управляет им специальный электронный блок, который получает
от нескольких датчиков информацию о скорости автомобиля, об угле
поворота руля, передних и задних колес автомобиля и т. д.
А управляет им специальный электронный блок, который получает
от нескольких датчиков информацию о скорости автомобиля, об угле
поворота руля, передних и задних колес автомобиля и т. д.
Как работает система управления четырьмя колесами?
Машины становятся все более технологически сложными, физически большими и дико тяжелыми — Я смотрю на тебя, GMC Hummer . Отчасти это связано с повышенными стандартами безопасности в отношении риска опрокидывания, смещенных ударов и необходимости использования высокопрочной стали в конструкции транспортного средства при столкновении, но безопасность — не единственная причина. Существует также множество электрифицированных предложений, которые добавили вес из-за плотных аккумуляторных систем.
Независимо от причины этой тенденции увеличения масштаба, результат один и тот же: дерьмовое обращение. Вес и размер приводят к ужасающе медленным изменениям направления. На ум приходит старая поговорка о трудности корректировки курса корабля. Однако потребители по-прежнему требуют от своих 6000-фунтовых Rolls-Royce Cullinan управляемости спортивных автомобилей, поэтому рулевое управление четырьмя колесами быстро стало одной из механических опор автомобильного мира.
Вес и размер приводят к ужасающе медленным изменениям направления. На ум приходит старая поговорка о трудности корректировки курса корабля. Однако потребители по-прежнему требуют от своих 6000-фунтовых Rolls-Royce Cullinan управляемости спортивных автомобилей, поэтому рулевое управление четырьмя колесами быстро стало одной из механических опор автомобильного мира.
Термин «управление четырьмя колесами» имеет несколько вариаций, таких как управление всеми колесами и управление задними колесами (как в последнем объявлении Tesla Cybertruck). С таким количеством терминов и даже названий брендов, которые используются там, это может сильно сбить с толку обычного человека, пролистывающего последнюю брошюру Porsche.
Чтобы лучше пролить свет на рулевое управление задними колесами, которое было изобретено в 1893 году, В разделе Guides & Gear на The Drive собрано исчерпывающее объяснение систем управления четырьмя колесами, как они работают, кто их производит и как они влияют на вашу производительность езды.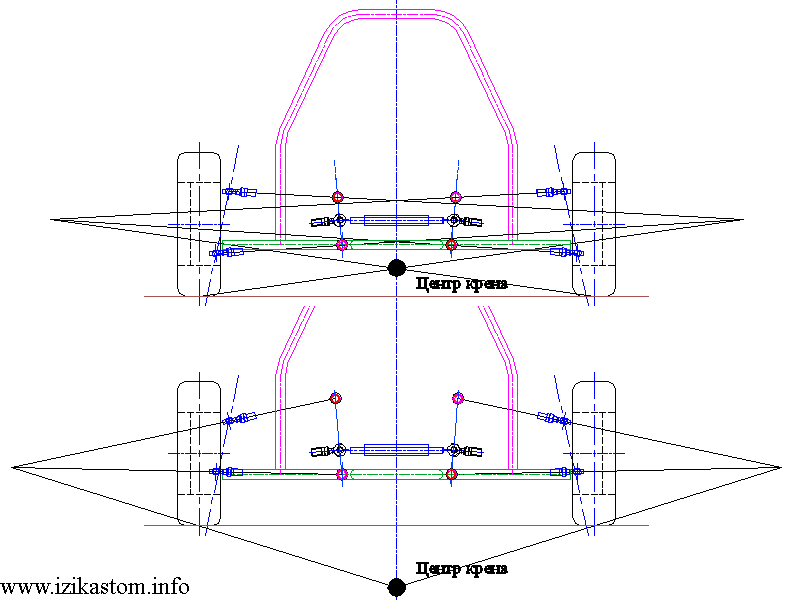 Давайте покатаемся.
Давайте покатаемся.
Что такое система управления четырьмя колесами и как она работает?
Управление задними колесами представляет собой механизм, который при повороте рулевого колеса приводит в действие углы задних колес и либо поворачивает их вместе с передними колесами, либо в противоположном направлении, чтобы лучше увеличить скорость транспортного средства на низкой или высокой скорости ловкость.
Через мгновение мы рассмотрим различные типы систем управления задними колесами, но основная предпосылка этих систем заключается в использовании набора гидравлических или электрических приводов для изменения схождения задних колес.
Схождение относится к углу, под которым колесо направлено внутрь или наружу от автомобиля, отсюда и термины «схождение внутрь» и «схождение наружу». Носок также может быть описан как отрицательный и положительный. В большинстве ситуаций схождение относится к передним колесам автомобиля и, в зависимости от того, направлены ли оба колеса внутрь или наружу, оно влияет на устойчивость автомобиля на высоких скоростях (схождение внутрь) или маневренность на низких скоростях (схождение наружу).
В большинстве ситуаций схождение относится к передним колесам автомобиля и, в зависимости от того, направлены ли оба колеса внутрь или наружу, оно влияет на устойчивость автомобиля на высоких скоростях (схождение внутрь) или маневренность на низких скоростях (схождение наружу).
При управлении задними колесами система автомобиля изменяет схождение обоих задних колес в тандеме, что означает, что задние колеса перемещаются вправо или влево синхронно, поэтому они направлены в одном направлении. Это полная противоположность тому, как работает схождение передних колес автомобиля.
Система Acura P-AWS показана в разрезе., Acura Хотя каждая система уникальна, результирующее движение задних колес при управлении четырьмя колесами абсолютно одинаково для разных систем. Когда водитель поворачивает руль на малой скорости, передние колеса поворачиваются в направлении движения, а задние колеса поворачиваются в противоположном направлении, эффективно уменьшая радиус поворота автомобиля. Это делает маневры на низкой скорости более быстрыми и легкими.
Это делает маневры на низкой скорости более быстрыми и легкими.
Рулевое управление на более высоких скоростях поворачивает передние и задние колеса в одном направлении для повышения устойчивости на высоких скоростях. В мире производительности это означает, что вы можете иметь длинный, несколько тяжелый автомобиль, такой как Porsche Panamera, не отставать от спортивного автомобиля с более короткой колесной базой, такого как Porsche 911.
Эти системы также улучшают производительность более крупных и тяжелых автомобилей. чем они были бы, если бы вращались только передние колеса. Это видно на таких примерах, как Lamborghini Urus, Bentley Flying Spur и Mercedes-Benz S-класса.
Существуют разные типы рулевого управления четырьмя колесами
Разные производители предлагают разные решения для управления задними колесами, хотя все они служат одним и тем же целям.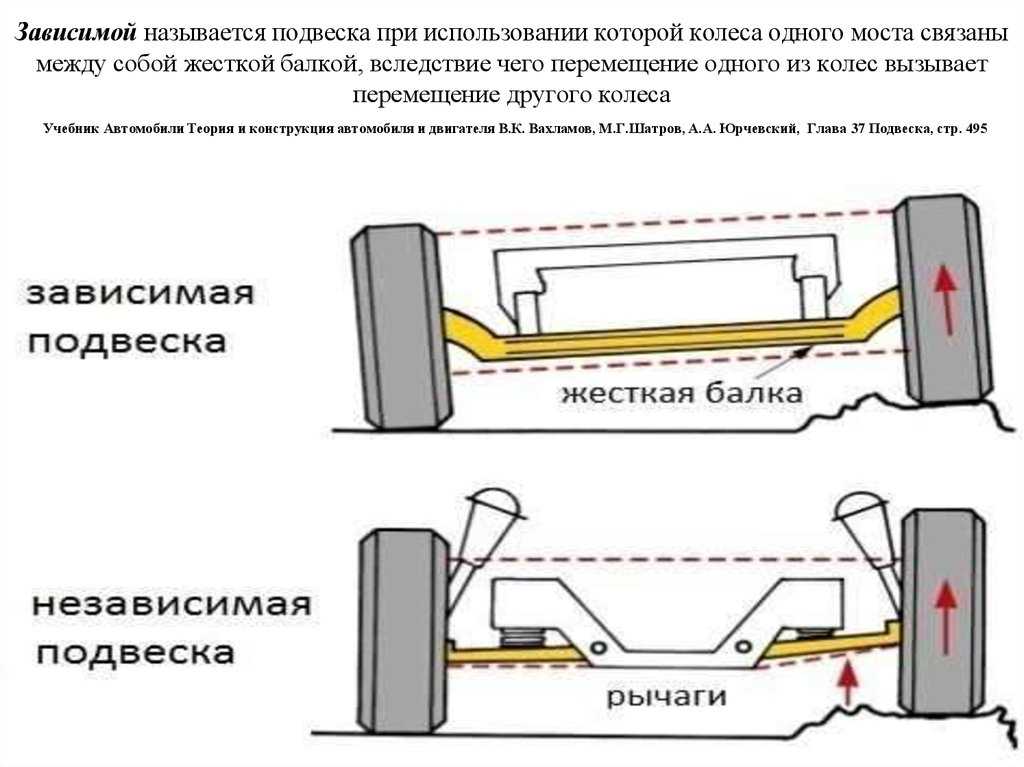 Некоторые полагаются только на механические системы, такие как старая система Nissan HICAS (High-Capacity Actively Controlled Steering), в то время как большинство использует электромеханические версии, такие как система динамического управления всеми колесами Audi, система рулевого управления задними колесами Porsche и Active. Системы управления кинематикой (AKC), поставляемые ZF таким производителям, как Ferrari и Cadillac.
Некоторые полагаются только на механические системы, такие как старая система Nissan HICAS (High-Capacity Actively Controlled Steering), в то время как большинство использует электромеханические версии, такие как система динамического управления всеми колесами Audi, система рулевого управления задними колесами Porsche и Active. Системы управления кинематикой (AKC), поставляемые ZF таким производителям, как Ferrari и Cadillac.
Опять же, эти две системы работают практически одинаково, изменяя схождение задних колес внутрь или наружу, но они различаются тем, что их приводит в действие. В механической системе, такой как Nissan HICAS, которая не использовалась в автомобилях Nissan со времен GT-R поколения R34 или в Infiniti со времен G37, для приведения в действие колес использовалась гидравлика, приводимая в действие насосом гидроусилителя рулевого управления. Затем датчики скорости будут использоваться, чтобы определить, в какую сторону будут поворачиваться задние колеса и насколько. Похожая система была у Honda Prelude Si 4WS.
Похожая система была у Honda Prelude Si 4WS.
Электромеханические системы управления четырьмя колесами теперь гораздо более распространены и более совершенны, чем их более ранние версии. Управляемые электронным блоком управления автомобилем и несколькими датчиками вдоль трансмиссии, современные системы рулевого управления четырьмя колесами обеспечивают гораздо более точное расположение колес, углы и возможности, чем их предшественники.
Хотя основной результат один и тот же, производители также различаются по допустимому углу поворота задних колес: от 1 до 15 градусов.
О.Г. Четырехколесные автомобили и как они работали полноприводные спортивные автомобили.
Задний подрамник системы Super HICAS., NissanNissan GT-R HICAS
Хотя система Nissan HICAS известна своим использованием на платформе Skyline GT-R, она не была первой, кто ее получил. Система была впервые продемонстрирована в 1985 году, но ее первое практическое применение было на Skyline GTS 1986 года.
Система была впервые продемонстрирована в 1985 году, но ее первое практическое применение было на Skyline GTS 1986 года.
HICAS был разработан в компании Nissan отцом Skyline Шиничиро Сакураи. Главный инженер работал в компании Prince до того, как она была включена в состав Nissan, и принимал активное участие в разработке дикого R380. Он также был известен своим обращением со словами. Это касается его описания того, как он представлял HICAS.
Наганори Ито, человек, которого Сакураи выбрал своим преемником, однажды описал, чего его наставник хотел от системы HICAS:
«Основная философия Skyline — обеспечить надежность и выдающиеся ходовые качества. Идеал — это автомобиль, который абсолютно соответствует намерениям водителя. Это похоже на то, как лошадь и всадник становятся одним целым, когда всадник сидит на спине лошади, а лошадь движется. Лошадь создает толчок, отталкиваясь задними ногами и применяя крутящий момент, чтобы двигаться вперед. Это вполне естественно.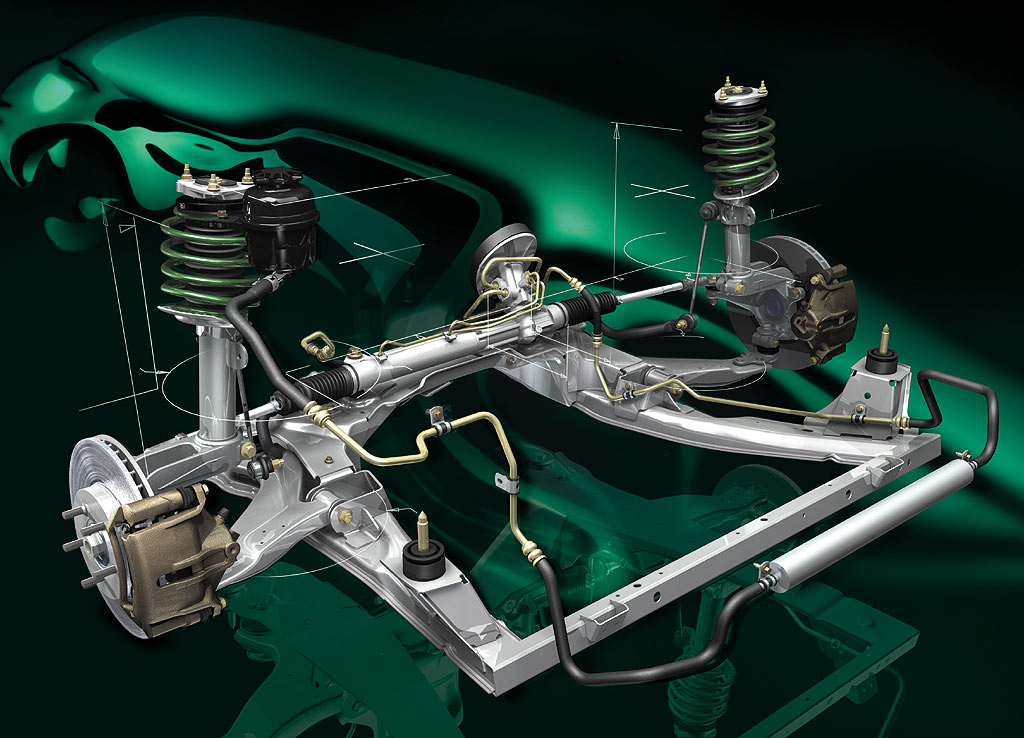 Это хороший пример системы заднего привода в автомобилях. Но если вы понаблюдаете за движением лошади повнимательнее, то увидите, что она тоже отталкивается от земли передними ногами, а задними также контролирует направление своего движения. Чтобы воспроизвести это, автомобилям нужны полноприводные системы и системы управления четырьмя колесами. Это функции систем ATTESA и HICAS».
Это хороший пример системы заднего привода в автомобилях. Но если вы понаблюдаете за движением лошади повнимательнее, то увидите, что она тоже отталкивается от земли передними ногами, а задними также контролирует направление своего движения. Чтобы воспроизвести это, автомобилям нужны полноприводные системы и системы управления четырьмя колесами. Это функции систем ATTESA и HICAS».
Nissan поясняет принцип работы HICAS следующим образом:
«В более ранних версиях HICAS для управления задними колесами использовалась гидравлика. Гидравлическая система приводилась в действие насосом гидроусилителя руля и использовала датчики скорости, чтобы определять, насколько и в каком направлении следует поворачивать задние колеса. Более поздние версии, получившие название Super HICAS, перешли на электрический привод задней рулевой рейки, что сделало систему намного легче. Super HICAS использует входные данные от датчика скорости и датчика угла поворота рулевого колеса через компьютер HICAS системы, чтобы определить, насколько быстро вы входите в поворот, и регулирует угол наклона задних колес в соответствии с условиями движения. Рулевое управление задними колесами HICAS и Super HICAS ограничено примерно одним градусом в любом направлении».
Рулевое управление задними колесами HICAS и Super HICAS ограничено примерно одним градусом в любом направлении».
В дополнение к Skylines модели Nissan 300ZX, 180SX и 240SX поколения Z32, а также Infiniti M35, M45, Q45 и Q37 также были оснащены системами HICAS и Super HICAS.
Мятный Prelude Si 4WS., Bring-a-TrailerHonda Prelude Si 4WS
Prelude Si 4WS — это не совсем то, что можно было бы ожидать от Honda в конце 1980-х. Если подумать, если учесть, что большая часть того периода была произведена Эскобаром неоновым светом, то горячий четырехдверный автомобиль эконом-класса с управлением всеми колесами имеет смысл в мире.
Основная идея системы управления четырьмя колесами Prelude Si 4WS исходила из желания Honda «вывести управляемость и маневренность автомобиля на новый уровень». Honda начала разработку системы 4WS для Prelude в 1977 году, в результате чего была создана система рулевого управления с четырьмя колесами, зависящая от угла поворота.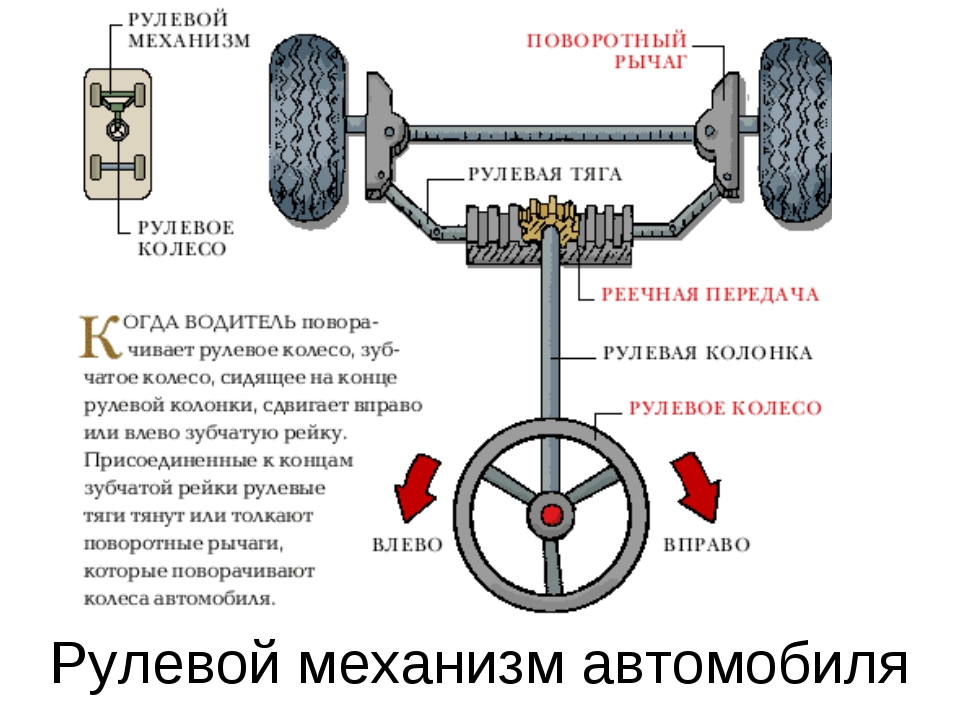 Чисто механическая система, четырехколесное рулевое управление Prelude использовало два рулевых редуктора, один спереди и один сзади, с центральным валом, механически связывающим их.
Чисто механическая система, четырехколесное рулевое управление Prelude использовало два рулевых редуктора, один спереди и один сзади, с центральным валом, механически связывающим их.
Honda прислала оригинальный пресс-релиз Prelude Si 4WS с подробным описанием работы системы.
«Когда водитель поворачивает руль, реечный механизм в переднем рулевом редукторе заставляет рейку двигаться вбок», — говорится в сообщении. «Этот ход рейки управляет передними колесами. В то же время он вращает выходной вал-шестерню через другую рейку и шестерню, расположенную внутри коробки передач. Этот выходной вал-шестерня передает вращение рулевого колеса на задний рулевой редуктор через центральный вал. Упорный стержень внутри заднего рулевого редуктора перемещается в осевом направлении, чтобы управлять задними колесами через рулевые тяги».
То, как это работало по отношению к скорости автомобиля, еще более дико.
«При повороте рулевого колеса менее чем на 140 градусов от положения прямолинейного движения выходной ход перемещается в одном направлении», — говорится в релизе. «Для углов, превышающих этот, ход и относительное движение сзади постепенно и плавно уменьшаются и в конечном итоге поворачиваются в противоположном направлении. Таким образом, задний рулевой редуктор содержит механизм, который постепенно меняет направление выходного сигнала в зависимости от величины рулевого управления».
«Для углов, превышающих этот, ход и относительное движение сзади постепенно и плавно уменьшаются и в конечном итоге поворачиваются в противоположном направлении. Таким образом, задний рулевой редуктор содержит механизм, который постепенно меняет направление выходного сигнала в зависимости от величины рулевого управления».
Honda добавляет: «Механически, когда рулевое колесо первоначально поворачивается от прямолинейного положения, задние колеса поворачиваются в том же направлении, что и передние. Но когда усилие рулевого управления увеличивается и руль поворачивается больше, чем на заданную величину, примерно на 240 градусов, задние колеса начинают поворачиваться в противоположном направлении».
Когда в 1987 году компания Road & Track тестировала Prelude Si 4WS, она фактически превзошла Porsche и Ferrari в слаломном тесте. Система Honda 4WS в Prelude использовалась в следующих двух поколениях, хотя последнее поколение Prelude было вариантом только для Японии и только в моделях Si и SiR.
Mitsubishi 3000GT VR-4/GTO
Хотя мы знаем только мощный Mitsubishi 3000GT VR-4 в Соединенных Штатах, его родословная GTO только для Японии может быть прослежена до Galant VR-4 и введение системы Dynamic Four от Mitsubishi. В отличие от других здесь, Dynamic Four от Mitsubishi не была одиночной системой, она также включала полный привод, управление четырьмя колесами, независимую подвеску четырех колес и ABS на четыре колеса, отсюда и название.
Выпущен в 1987, Galant VR-4 стал родоначальником не только 3000GT, но и всемогущего Lancer Evolution. И этот прототип раллийного автомобиля породил не только Dynamic Four, но и Active ECS для полноприводных моделей, первую активную систему подвески на рынке. Mitsubishi увидела в них две противоположные стороны одной медали и назвала зонт Active Footwork System, что является отличным названием для набора систем.
Согласно оригинальному пресс-релизу Galant: «Система Active Footwork System, принятая на этот раз для Galant, является общим названием для Active Four (модели с полным приводом) и Active ECS (модели с приводом на два колеса), которые в основном состоят из из следующих систем подвески, чтобы создать больше места для движения от низких до высоких скоростей и облегчить вождение в эпоху высокой производительности. Это революционно новая система, которая дополнительно улучшает динамические характеристики автомобиля с точки зрения ускорения, прохождения поворотов и торможения за счет увеличения сцепления между каждой шиной и дорожным покрытием».
Что касается системы управления четырьмя колесами, согласно сообщению, это полностью гидравлическая система, чувствительная к скорости автомобиля и усилию на рулевом колесе для дальнейшего улучшения реакции рулевого управления в диапазоне средних и высоких скоростей. Как это работает, гидравлическое давление передается на шарниры продольных рычагов задней подвески до 1,5 градусов, хотя это зависит от усилия на рулевом колесе и скорости автомобиля более 50 км/ч.
Три года спустя Mitsubishi представила модель 3000GT (GTO в Японии) с системой Active Footwork System и слоганом «GTO. Создан для того, чтобы водители с любым уровнем подготовки могли наслаждаться его высокими характеристиками — безопасно, с удовольствием и по своему вкусу».
Согласно оригинальному японскому пресс-релизу GTO, система управления четырьмя колесами работала следующим образом: «Гидравлический привод соединен с промежуточным шарниром на конце продольного рычага. Привод регулируется насосом управления задними колесами, соединенным с гидравлическим контуром усилителя передних колес, так что угол поворота задних колес пропорционален усилию управления передними колесами. Угол поворота заднего колеса пропорционален скорости автомобиля, потому что насос рулевого управления заднего колеса подает масло в количествах, соответствующих скорости вращения задних колес».
В сочетании с безнаддувным двигателем V-6 или двигателем V-6 с двойным турбонаддувом в 3000GT VR-4 спортивный автомобиль 2+2 был создан, чтобы конкурировать с Skyline GT-R, Supra и RX-7.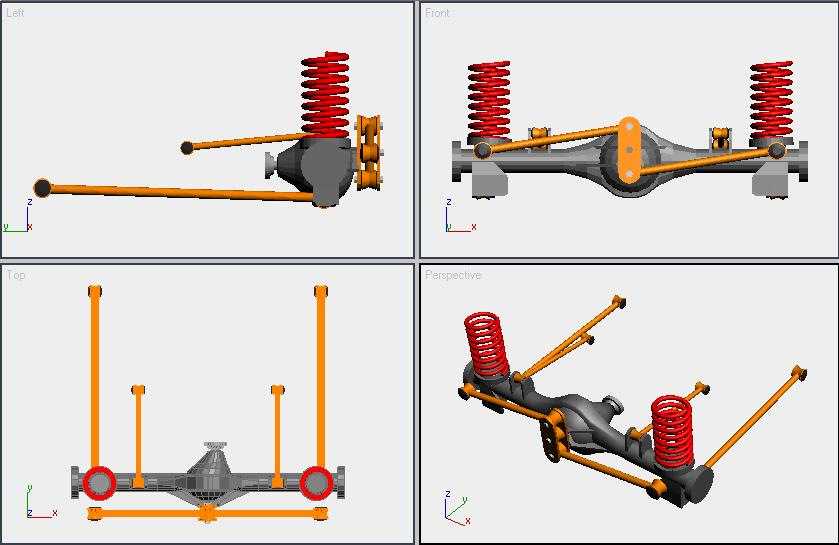 , а также с активной аэродинамикой как спереди, так и сзади. Выпуск 3000GT/GTO также пришелся на период «джентльменского соглашения» для японских автомобилей с высокими характеристиками, что означало, что мощность автомобилей с высокими характеристиками была ограничена примерно 276 лошадиными силами, по крайней мере, на бумаге. Однако более точное число для 3000GT VR-4, вероятно, составляло 300-350 лошадиных сил.
, а также с активной аэродинамикой как спереди, так и сзади. Выпуск 3000GT/GTO также пришелся на период «джентльменского соглашения» для японских автомобилей с высокими характеристиками, что означало, что мощность автомобилей с высокими характеристиками была ограничена примерно 276 лошадиными силами, по крайней мере, на бумаге. Однако более точное число для 3000GT VR-4, вероятно, составляло 300-350 лошадиных сил.
Что интересно, хотя некоторые из этих систем были перенесены на недавно названную систему Super All-Wheel Control (S-AWC) для Mitsubishi Lancer Evolution, прямого потомка Galant VR-4, она не перенесла четырехколесная система управления — как и Pajero Evo.
QUADRASTEER TRUCK, BABY!, General MotorsGeneral Motors Quadrasteer
Quadrasteer от General Motors, безусловно, является чудаком в группе, но он заслуживает некоторого внимания как первое применение на полноразмерных пикапах.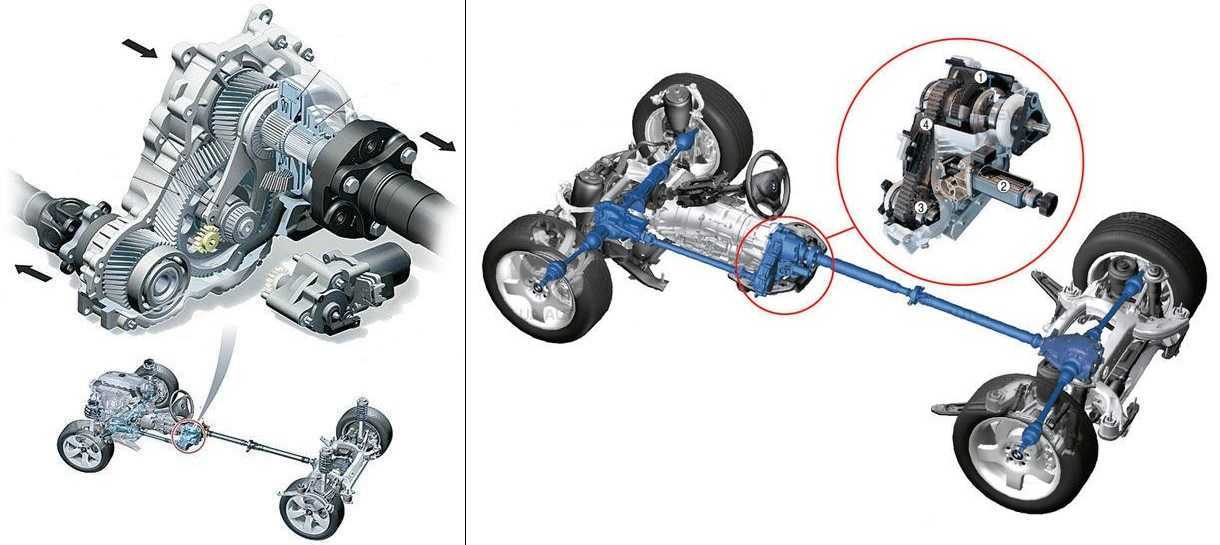 К несчастью для GM, это продлилось недолго.
К несчастью для GM, это продлилось недолго.
Грузовики в США — это большой бизнес. Это может быть преуменьшением десятилетия, но количество исследований и разработок, потраченных на то, чтобы превзойти конкурентов, просто дикое. Все на столе с точки зрения того, что производители могут предложить своим потребителям, чтобы переманить их от других марок и моделей. В 2002 году GM стала одержима идеей, что рулевое управление четырьмя колесами станет следующим большим достижением. Добро пожаловать в Quadrasteer.
В оригинальном выпуске новостей от 2002 года GM заявляет: «Дженерал Моторс стала лидером отрасли, впервые предложив систему управления четырьмя колесами Quadrasteer для полноразмерного грузовика. Инновационная система, делающая вождение грузовика более безопасным, легким и удобным, дебютирует на полноразмерном пикапе GMC Sierra Denali в четвертом квартале 2002 года. Quadrasteer знаменует собой веху в управлении и управлении полноразмерными грузовиками. Это электромеханическая система, которая поворачивает задние колеса Sierra Denali (до 12 градусов) по отношению к передним колесам, что обеспечивает беспрецедентную маневренность на низких скоростях и устойчивость на высоких скоростях».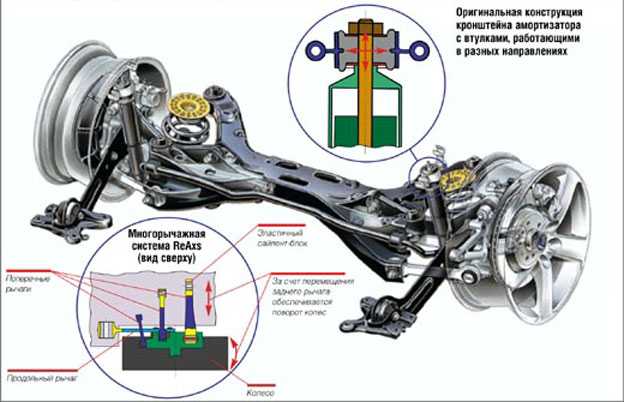
В отличие от других систем управления четырьмя колесами, систему управления GM можно было выбрать, что позволяло использовать как обычное управление передними колесами, так и управление всеми четырьмя колесами. Наряду с этими режимами GM также включила режим буксировки с управлением четырьмя колесами, каждый из которых приводился в действие набором кнопок на приборной панели. Согласно этому выпуску, «Quadrasteer работает, определяя желаемое рулевое управление с помощью датчика положения рулевого колеса. Эта информация подается на микропроцессор, который определяет соответствующие углы наклона задних колес в зависимости от рулевого управления и скорости автомобиля. Микропроцессор передает свои данные электродвигателю, который на основе алгоритмов приводит в движение заднюю рулевую рейку через планетарную передачу. При обнаружении системного сбоя отказоустойчивые механизмы Quadrasteer возвращаются к управлению двумя колесами».
Несмотря на преимущества полного рулевого управления на полноразмерном грузовике, GM закрыла программу после 2005 года. Только GMC Sierra, Sierra Denali и Yukon, а также Chevrolet Silverado и Suburban могли быть оснащены Quadrasteer, который стоил 5600 долларов при запуске, хотя до того, как программа была свернута, эта сумма была снижена до 1000 долларов.
Только GMC Sierra, Sierra Denali и Yukon, а также Chevrolet Silverado и Suburban могли быть оснащены Quadrasteer, который стоил 5600 долларов при запуске, хотя до того, как программа была свернута, эта сумма была снижена до 1000 долларов.
Производители, которые в настоящее время предлагают управление четырьмя колесами в своих автомобилях
Как вы можете себе представить, учитывая преимущества управления задними колесами в тяжелых автомобилях, большинство производителей предлагают ту или иную форму управления задними колесами. Однако нет двух одинаковых систем, и они не имеют одинакового обозначения.
Чтобы лучше понять системы, вот производители, которые их предлагают, и как они называются.
Cadillac: активное управление задними колесами
GMC: Crab Walk
Lamborghini: управление задними колесами Lamborghini
Mercedes-Benz: управление задними колесами
Acura: P-AWS (прецизионное управление всеми колесами)
1 BMW: 1 BMW: Интегральное активное рулевое управлениеRolls-Royce: система управления задними колесами
«Маленькая зеленая капля — это двигатель рулевого управления», — представитель Porsche, PorscheLexus: динамическое управление задними колесами
Genesis: Genesis управление задними колесами
Ferrari: виртуальная короткая колесная база
Audi: динамическое управление всеми колесами
Bentley: управление задними колесами Управление осью
Видео
Это одна из тем, которую лучше проиллюстрировать в виде видео, поскольку системы управления задними колесами представляют собой сложные технологические элементы. Вот один из них от нашего друга Джейсона Фенске из Engineering Explained.
Вот один из них от нашего друга Джейсона Фенске из Engineering Explained.
Часто задаваемые вопросы о системе управления четырьмя колесами
У вас есть вопросы. У Диска есть ответы.
В: В чем разница между полным приводом и полным приводом?
A: Полный привод — это когда мощность автомобиля может передаваться на все четыре колеса в той или иной степени. Рулевое управление всеми колесами — это система, которая позволяет вращать четыре колеса вашего автомобиля.
В: Всегда ли включена система управления всеми колесами?
Ответ: Есть. Эти системы повышают устойчивость и маневренность как на низких, так и на высоких скоростях, поэтому они всегда готовы помочь вашему автомобилю работать и работать. Рад.
Эти системы повышают устойчивость и маневренность как на низких, так и на высоких скоростях, поэтому они всегда готовы помочь вашему автомобилю работать и работать. Рад.
В: В какой машине впервые была установлена система управления всеми колесами?
A: Самая первая система управления четырьмя колесами была разработана в 1893 году британским инженером Джозефом Диплоком. Он запатентовал первый полный привод, систему управления четырьмя колесами, а также колесо pedrail.
Давайте поговорим: оставьте комментарий ниже и обратитесь к руководствам и редакторам Gear
Мы здесь, чтобы быть опытными гидами во всем, что связано с «как». Используйте нас, хвалите нас, кричите на нас. Комментарий ниже, и давайте поговорим. Вы также можете кричать на нас в Twitter или Instagram или связаться со всеми нами здесь: guidesandgear@thedrive. com.
com.
- Джонатон Кляйн: Твиттер | Инстаграм
- Тони Маркович: Твиттер | Инстаграм
- Крис Тиг: Twitter | Инстаграм
- Хэнк О’Хоп: Твиттер | Инстаграм
Управление задними колесами: что это такое?
Для того чтобы автомобили имели какой-то практический смысл, они должны уметь справляться с кривыми и поворотами.
С момента изобретения каждый автомобиль облегчал это, поворачивая передние колеса, чтобы они могли преодолевать повороты. Однако более поздней разработкой стало появление автомобилей, которые также могут поворачивать свои задние колеса на ограниченный диапазон градусов.
Они широко известны как системы управления четырьмя колесами (4WS) или системы управления задними колесами. На высоком уровне автопроизводители заявляют, что версии этих систем, доступные сегодня, позволяют автомобилю иметь более короткий радиус поворота на низких скоростях, обеспечивая практические преимущества при навигации по узким кольцевым развязкам или парковкам.
Однако, когда автомобиль движется быстрее, система обеспечивает повышенную устойчивость, оптимизируя динамические характеристики автомобиля. Давайте подробнее рассмотрим, как развивались эти системы и каковы их преимущества.
История
Хотя фундаментальная концепция управления задними колесами существует уже несколько десятилетий, эта технология начала набирать обороты в конце 1970-х годов, когда в таких моделях, как Porsche 928 grand tourer, была установлена ось Weissach.
Это отклоняло втулки задней подвески, когда автомобиль замедлялся до «схождения» задних колес (т. е. слегка наклоняло их внутрь), тем самым повышая устойчивость и уменьшая избыточную поворачиваемость.
Японские бренды впоследствии приняли эстафету от Porsche в 1980-х и 1990-х годах, разработав гораздо более сложные системы, которые могли предложить большие преимущества.
Nissan был первым, кто добился успеха со своим Skyline поколения R31, который при продаже с 1985 года предлагал систему под названием HICAS — High Capacity Actively Controlled Suspension.
Несмотря на ту же цель, что и механическая система Porsche, а именно улучшение устойчивости за счет уменьшения избыточной и недостаточной поворачиваемости, система Nissan использовала управляемые компьютером гидравлические поршни для сжатия втулок подрамника.
Это означало, что автомобиль мог сносить задние колеса внутрь или наружу на угол до 0,5 градуса для оптимизации устойчивости на высоких скоростях, независимо от того, замедляется ли автомобиль или его нагрузка на поворотах, в отличие от системы Porsche.
Honda выпустила конкурирующую систему в 1987 году на своем купе Prelude, которая отличалась соединением рулевой рейки с рулевыми тягами задней подвески, так что угол поворота задних колес зависел от угла поворота рулевого колеса.
Если водитель немного повернет руль (как и следовало ожидать во время резких поворотов), задние колеса повернутся на 1,5 градуса в том же направлении, что и передние, что улучшит устойчивость.
При больших углах поворота (как и следовало ожидать при пересечении кольцевой развязки или крутого поворота) задние колеса могли поворачиваться на угол до 5,3 градуса в противоположном направлении, причем, по утверждению Honda, это уменьшало радиус поворота примерно на 10 процентов.
Mazda, Mitsubishi и Toyota с аналогичными системами с электронным управлением на таких моделях, как MX-6, Galant VR-4 шестого поколения и некоторых моделях Celica соответственно. Honda и Nissan также присоединились ко второму поколению, еще более продвинутым версиям концепции 4WS с компьютерным управлением.
1980-е и начало 90-х годов были пиком японского экономического бума и, соответственно, пиком амбиций японской автомобильной промышленности, за которым последовал период стагнации.
В соответствии с этим клиенты все больше беспокоились о том, что стоимость, сложность и предполагаемые потенциальные проблемы надежности этих систем перевешивают любые ощутимые преимущества в производительности. К началу 2000-х годов большинство японских OEM-производителей постепенно исключили системы рулевого управления четырьмя колесами из своих модельных рядов в соответствии с более консервативным акцентом на надежные, надежные и доступные продукты.
Возрождение современности: сегодня доступны автомобили с задним управлением
Динамические и эксплуатационные преимущества систем управления задними колесами никогда не оспаривались, и совсем недавно несколько европейских брендов, таких как Mercedes-Benz и BMW (включая Rolls-Royce), возглавили современное возрождение этой технологии.
Последние модели Mercedes-Benz S-класса и EQS, возможно, имеют самую передовую систему управления задними колесами, доступную на сегодняшний день. Эта система может поворачивать задние колеса на 4,5 градуса, при этом колеса движутся в противоположном направлении от передней оси на скорости ниже 60 км/ч и в том же направлении на скорости выше этой для повышения устойчивости при прохождении поворотов.
Опционально (при размерах колес 20 дюймов и меньше) система может поворачивать задние колеса не более чем на 10 градусов. Это гарантирует, что радиус поворота большого S-класса составляет всего 10,8 м, как и у A-класса, самого маленького автомобиля в линейке Mercedes, на более низких скоростях (с короткой колесной базой).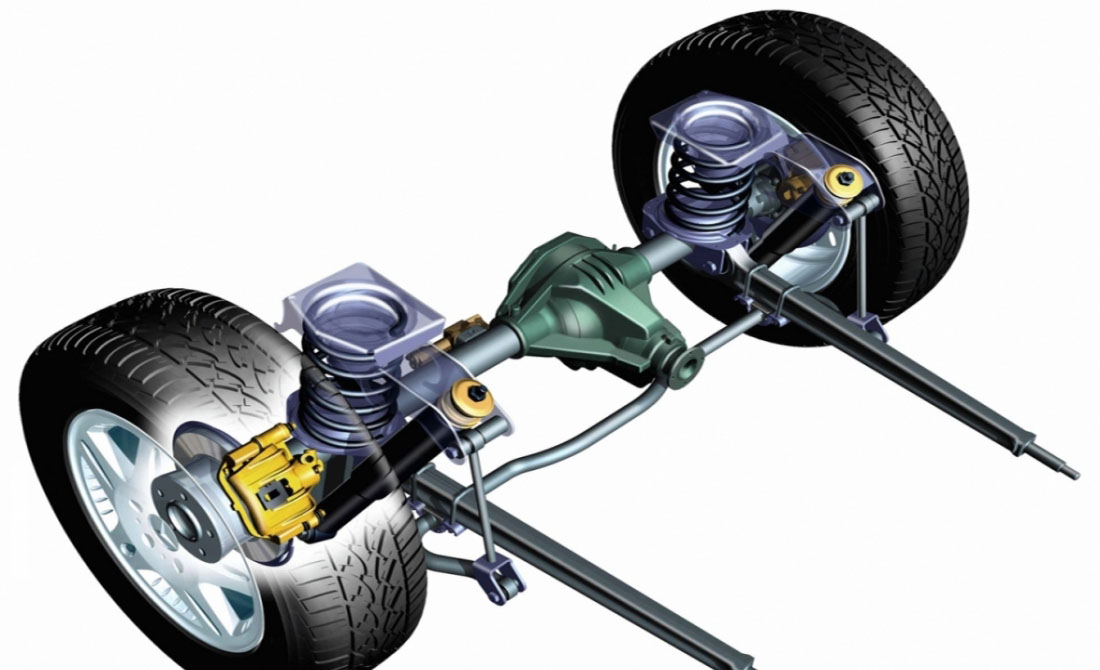
Другие автомобили, доступные сегодня с системами управления задними колесами, включают Mercedes-Benz C-Class, Renault Megane R.S., Lamborghini Urus, Porsche 911, BMW 7-Series (и i7), а также Rolls-Royce Ghost.
Обратите внимание, однако, что из-за постоянной нехватки полупроводников не все автомобили, описанные выше, в настоящее время могут быть заказаны с этой функцией. Например, недавно выпущенный Mercedes C-Class временно недоступен с управлением задними колесами для новых заказов (некоторые модели могут иметь эту функцию).
Связанные инновации
В США компания General Motors использовала управление задними колесами для разработки технологии Crabwalk для своего нового электромобиля GMC Hummer EV. Согласно названию, эта функция позволяет автомобилю двигаться по диагонали, подобно крабу, идущему боком, чтобы помочь автомобилю выйти из крутых поворотов или преодолеть различные препятствия на бездорожье. Функция работает, гарантируя, что передние и задние колеса поворачиваются на один и тот же угол параллельно.